3 月特斯拉剛剛發(fā)表 Model 3 的時(shí)候,相信許多人對(duì)這款新車的內(nèi)裝充滿了疑惑,比如缺少儀表板。特斯拉方面曾表示,所有的操作和資訊顯示將透過車內(nèi) 15 英吋的觸控螢?zāi)怀尸F(xiàn),但這導(dǎo)致一個(gè)問題:在駕駛的過程中,沒有儀表板怎么看速度?會(huì)不會(huì)影響駕駛體驗(yàn)?
2016-04-19 09:43:30 1225
1225 本篇文章將介紹恩智浦客戶應(yīng)用工程師設(shè)計(jì)的機(jī)車儀表板圖形應(yīng)用以及最新的GUI Guider v1.4.0。
2022-09-22 09:23:281957 數(shù)據(jù)進(jìn)行處理并進(jìn)行了現(xiàn)場實(shí)驗(yàn)。經(jīng)過現(xiàn)場調(diào)試和試驗(yàn),證明本文的汽車制動(dòng)性能測控系統(tǒng)已實(shí)現(xiàn)了設(shè)計(jì)要求,檢測性能符合國家有關(guān)規(guī)定和實(shí)際使用要求。關(guān)鍵詞:汽車制動(dòng)性 測控檢測系統(tǒng) 抗干擾 CPLD 數(shù)字
2009-04-16 13:56:57
HALO,在4.15,現(xiàn)在在4.20 ISDASHARD-內(nèi)存有時(shí)工作(Windows 764)。MPLAB或計(jì)算機(jī)幫助的新開始。點(diǎn)擊儀表板/項(xiàng)目屬性/加載(在類別中)+應(yīng)用程序再次工作,但只有一次
2018-09-13 15:40:21
隨著汽車電子技術(shù)的飛速發(fā)展,傳統(tǒng)的車用機(jī)械儀表盤已呈現(xiàn)出向數(shù)字儀表過度的趨勢,與之對(duì)應(yīng)的全部功能顯示也將被渲染后的高清畫面所取代。而引起這一巨大變革的根源,卻是一個(gè)只有一元硬幣大小的集成電子芯片--圖形儀表盤MCU(圖形儀表盤微控制單元),今天我們就以之為題為您講述汽車儀表變革背后的故事。
2019-07-16 07:56:00
隨著汽車電子技術(shù)的飛速發(fā)展,傳統(tǒng)的車用機(jī)械儀表盤已呈現(xiàn)出向數(shù)字儀表過度的趨勢,與之對(duì)應(yīng)的全部功能顯示也將被渲染后的高清畫面所取代。而引起這一巨大變革的根源,卻是一個(gè)只有一元硬幣大小的集成電子芯片--圖形儀表盤MCU(圖形儀表盤微控制單元),今天我們就以之為題為您講述汽車儀表變革背后的故事。
2019-07-09 06:27:05
有限,其中就包括這把從水體中伸出的萬能鑰匙。在過去幾年中,儀表板開始變得越來越有意思了。如果你還未升級(jí)你的81 Scirocco的話,它們可比之前好看多了。圖3:目前,儀表板已經(jīng)是數(shù)字化的了,耗電也更多
2018-09-04 11:48:04
空間。防止系統(tǒng)在功能設(shè)計(jì)變化微小時(shí),而對(duì)設(shè)計(jì)電路和程序做很大的修改與調(diào)整。(5)系統(tǒng)要有良好的經(jīng)濟(jì)性與實(shí)用性,以市場需求作為產(chǎn)品開發(fā)的導(dǎo)向。界面要滿足駕駛舒適性,設(shè)計(jì)的儀表板在車內(nèi)部有美化作用。3.2
2019-05-30 05:00:04
請(qǐng)問有汽車儀表面板的Labview的程序設(shè)計(jì)嗎?
2012-04-25 16:39:11
EIC的功能是什么?汽車電子儀表板(EIC)的顯示原理是什么 ?
2021-05-17 06:32:31
隨著汽車電子技術(shù)的飛速發(fā)展,傳統(tǒng)的車用機(jī)械儀表盤已呈現(xiàn)出向數(shù)字儀表過度的趨勢,與之對(duì)應(yīng)的全部功能顯示也將被渲染后的高清畫面所取代。而引起這一巨大變革的根源,卻是一個(gè)只有一元硬幣大小的集成電子芯片--圖形儀表盤MCU(圖形儀表盤微控制單元),今天我們就以之為題為您講述汽車儀表變革背后的故事。
2019-07-09 06:03:04
工藝和風(fēng)格上的差異,是整車的代表作之一。現(xiàn)代轎車的儀表板總成一般分成兩部分,一部分是指方向盤前的儀表板和儀表罩及平臺(tái),另一部分是指司機(jī)旁通道上的副儀表板。其中儀表板是安裝指示器的主體,集中了全車的監(jiān)察
2018-02-08 13:58:07
位置以及與眼睛間的距離實(shí)現(xiàn)的。Ameya360 混合 3D 顯示儀表板解決方案從車輛連接和系統(tǒng) MCU 到帶可擴(kuò)展的 3D 圖形性能的汽車應(yīng)用處理器。該方案使用的汽車應(yīng)用處理器提供如 OpenGL ES
2018-09-28 13:34:43
,新應(yīng)用>振動(dòng)監(jiān)測>訓(xùn)練>>播放導(dǎo)致Boards scanning out。我在 BLE 應(yīng)用程序的云菜單中添加了 AWS 安全密鑰和私鑰。它通知 AWS Active 仍在儀表板中,它表示設(shè)備未連接。
2022-12-30 08:41:55
我有點(diǎn)迷惑于XC8使用的程序內(nèi)存,并用MPLABX 4.01和XC8 1 4.44做了一些測試。目標(biāo)設(shè)備=具有56KB閃存的PIC16F1887(在儀表板中報(bào)告為32 K字不為30K)!儀表板報(bào)告7
2020-03-12 11:25:08
在MPLAB?X的主要工具欄窗口上沒有項(xiàng)目-GT;儀表板?我錯(cuò)過什么了嗎? 以上來自于百度翻譯 以下為原文There is no item on MPLAB? X's main tool
2019-05-30 10:32:55
、轉(zhuǎn)速表、機(jī)油壓力表、水溫表、燃油表、充電表等。 現(xiàn)代汽車儀表盤的面膜下制作了各式各樣的指示燈或警報(bào)燈,例如冷卻液液面警報(bào)燈、燃油量指示燈、清洗器液面指示燈、充電指示燈、遠(yuǎn)近光變光指示燈、變速器擋位指示...
2021-08-31 06:27:14
阿基米德 (287 BC – 212 BC) 與19世紀(jì)的工程師Otto Schulze是什么關(guān)系?現(xiàn)代儀表板的主要元件是它們那些具有開創(chuàng)性的發(fā)明,比如說里程表和速度計(jì),它們?yōu)槟愕能噦z內(nèi)所配備
2018-09-04 14:48:25
先進(jìn)汽車儀表板及車身控制設(shè)計(jì)要領(lǐng)是什么?車用MCU常見接口是什么?
2021-05-12 06:07:06
進(jìn)行開發(fā),最終實(shí)現(xiàn)<br/>了完整的汽車智能數(shù)字儀表的測試方案。<br/>關(guān)鍵詞:LabVIEW;PXI;狀態(tài)機(jī);儀表測試<
2009-04-21 17:13:38
儀表測試平臺(tái)軟件總體功能框圖1.界面模塊 測試平臺(tái)左側(cè)是各種模塊功能測試的切換按鍵,可以切換到單個(gè)功能模塊的測試項(xiàng)目。右側(cè)主界面模擬汽車儀表板的顯示界面,如車速表、轉(zhuǎn)速表、水溫表、燃油表、里程指示
2019-06-04 07:40:24
有限,其中就包括這把從水體中伸出的萬能鑰匙。在過去幾年中,儀表板開始變得越來越有意思了。如果你還未升級(jí)你的81 Scirocco的話,它們可比之前好看多了。圖3:目前,儀表板已經(jīng)是數(shù)字化的了,耗電也
2016-01-29 09:33:46
的81 Scirocco的話,它們可比之前好看多了。圖3:目前,儀表板已經(jīng)是數(shù)字化的了,耗電也更多了。目前的大多數(shù)儀表板是數(shù)字的,將LCD和LED用作背光光源(圖3)。事實(shí)上,如果你只有一個(gè)3.5英寸
2022-11-17 07:38:18
我正在搜索更改 wingets 位置的簡單而有用的方法,以實(shí)現(xiàn)更靈活的調(diào)試 UI 設(shè)計(jì)。例如,如何將儀表放在儀表板上的圖表下方 20 像素之前?流程看起來像:
2022-12-07 06:24:17
親愛的大家,如何整體調(diào)整儀表板組件的布局?我現(xiàn)在發(fā)現(xiàn)每個(gè)組件只能單獨(dú)調(diào)整大小,不能放在單個(gè)面板中來評(píng)估整體布局。我的儀表盤一團(tuán)糟。
2023-01-29 07:29:50
汽車儀表板TFT顯示器的挑戰(zhàn)有哪些?現(xiàn)代TFT顯示器儀表板架構(gòu)是由哪些部分組成的?如何用SPC56xS系列微控制器創(chuàng)新儀表板架構(gòu)?
2021-05-17 07:05:17
汽車數(shù)字儀表是駕駛員與汽車的信息交流界面,對(duì)汽車安全以及經(jīng)濟(jì)行駛具有重要作用。近年來,隨著汽車電子技術(shù)的發(fā)展,汽車數(shù)字儀表顯示信息也不斷增加,而傳統(tǒng)機(jī)械指針式汽車組合儀表則無法滿足現(xiàn)在使用需求
2019-08-08 07:37:04
各位客官老爺們大家好,這是我第一次申請(qǐng)公眾號(hào),也是第一次發(fā)文章,本著分享與求知的心態(tài),記錄一下自己開發(fā)汽車obd數(shù)字儀表盤的過程,能對(duì)別人有一絲的幫助,那是最好不過的,如果沒有,也求拍磚與批評(píng)指導(dǎo)
2021-12-20 08:00:00
怎么實(shí)現(xiàn)基于CDC3207G微控制器的汽車儀表板設(shè)計(jì)?
2021-05-11 06:06:03
使用電子式儀表板較之傳統(tǒng)儀表的優(yōu)勢是什么?怎么實(shí)現(xiàn)基于Freescale單片機(jī)的汽車組合儀表板的設(shè)計(jì)?
2021-05-18 06:23:04
電動(dòng)汽車數(shù)字儀表盤背后的秘密
2020-12-17 07:27:24
顯示信息也不斷增加,而傳統(tǒng)機(jī)械指針式汽車組合儀表則無法滿足現(xiàn)在使用需求。 特別是計(jì)算機(jī)、微電子和各種現(xiàn)場總線通信技術(shù)廣泛運(yùn)用,以嵌入式微處理器為核心的智能化數(shù)字式儀表將是汽車儀表發(fā)展的必然趨勢。本文
2014-10-27 15:20:45
怎么設(shè)計(jì)一種汽車智能數(shù)字儀表測試系統(tǒng)?汽車智能數(shù)字儀表測試系統(tǒng)具有哪些主要功能?如何實(shí)現(xiàn)數(shù)字儀表測試系統(tǒng)的硬件設(shè)計(jì)?如何實(shí)現(xiàn)數(shù)字儀表測試系統(tǒng)的軟件設(shè)計(jì)?
2021-04-14 06:39:16
一種基于CAN總線的汽車數(shù)字儀表的研究設(shè)計(jì)
2021-05-12 06:57:14
項(xiàng)目儀表板(顯示項(xiàng)目類型、CPU、校驗(yàn)和、內(nèi)存使用情況等)有時(shí)會(huì)顯示進(jìn)度條以及數(shù)據(jù)和程序使用情況,因此您可以一目了然地看到您正在使用的程序閃存和數(shù)據(jù)存儲(chǔ)器的數(shù)量。但有時(shí)它不顯示進(jìn)度條。我還沒弄清楚是什么影響了它。有誰知道是什么影響了它?這是V3.45,用于PIC32項(xiàng)目。
2019-10-28 08:49:59
瑞薩中國推出車和圖形儀表板開發(fā)平臺(tái)
2010-09-11 10:22:58 25
25 應(yīng)用德國Micronas公司的CDC3207G微控制器開發(fā)了一款汽車儀表板系統(tǒng)。詳細(xì)地介紹了該系統(tǒng)的硬件原理,以及步進(jìn)電機(jī),音頻控制,LCD顯示,LED指示燈和報(bào)警燈等幾個(gè)模塊的實(shí)現(xiàn)方法。
2010-12-23 15:41:3740 基于新一代SoC SH7264的圖形儀表板開發(fā)平臺(tái)
隨著汽車電子技術(shù)的不斷發(fā)展,越來越多的電子部件被安裝到了汽車中。如倒車?yán)走_(dá)早已是中高端汽車的標(biāo)配,而用戶對(duì)倒
2009-12-11 10:32:00797 汽車電子儀表板(EIC)技術(shù)原理
汽車電子儀表板
1、真空熒光顯示器(VFD)
2010-03-11 10:17:25848 富士通半導(dǎo)體(上海)有限公司近日宣布推出一款用于汽車數(shù)字儀表板和導(dǎo)航系統(tǒng)的圖像顯示LSI芯片——MB86R11,該芯片
2010-12-02 09:10:061819 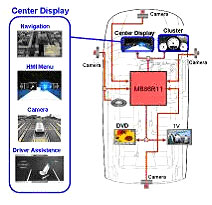
會(huì)議將全面介紹飛思卡爾面向汽車儀表板應(yīng)用的產(chǎn)品解決方案,包括針對(duì)從2輪車輛的應(yīng)用(摩托車和踏板車)到可配置的高端 多顯示屏儀表板應(yīng)用。會(huì)議還將講解構(gòu)成這個(gè)經(jīng)濟(jì)高效型解決
2012-08-15 15:12:3954 本系統(tǒng)是用CPLD實(shí)現(xiàn)的智能數(shù)字電壓表。隨著EDA技術(shù)的廣泛應(yīng)用,CPLD已成為現(xiàn)代數(shù)字系統(tǒng)設(shè)計(jì)的主要手段,CPLD目前正朝著更高速、更高集成度、更強(qiáng)功能和更靈活的方向發(fā)展。
2012-11-09 16:24:263415 阿基米德 (287 BC 212 BC) 與19世紀(jì)的工程師Otto Schulze是什么關(guān)系?現(xiàn)代儀表板的主要元件是它們那些具有開創(chuàng)性的發(fā)明,比如說里程表和速度計(jì),它們?yōu)槟愕能噦z內(nèi)所配備的每一個(gè)
2017-04-26 18:28:11643 不知你還記不記得,儀表板曾經(jīng)非常的枯燥乏味?它們通常有5個(gè)功能:速度計(jì)、轉(zhuǎn)速表、里程表、油量表和溫度表。圖 1 :以前,儀表板很簡單,耗電也比現(xiàn)在低很多 萬一你受不了配偶的嘮叨,最終同意駕車去Winnipeg時(shí),比較時(shí)髦的儀表板可以顯示單位為英里/小時(shí)和公里/小時(shí)的速度值。
2017-04-26 19:03:591703 儀表板(instrument panel) 駕駛室中安裝各種指示儀表和點(diǎn)火開關(guān)等的一個(gè)總成。它裝在儀表嵌板上,或者作為附件裝在轉(zhuǎn)向管柱上。儀表板總成好似一扇窗戶,隨時(shí)反映車子內(nèi)部機(jī)器的運(yùn)行狀態(tài)。同時(shí)
2017-09-04 10:04:1911 儀表板是汽車上最主要的內(nèi)飾件,集功能性,舒適性,美觀性,安全性于一體。其主要結(jié)構(gòu)由塑料殼體、電路控制開關(guān)、各種儀表、影音娛樂系統(tǒng)、副安全氣囊、手套箱以及金屬支撐結(jié)構(gòu)組成。目前,在主流乘用車型的大部分
2018-01-10 17:00:410 汽車儀表板雜物箱把手起到開啟雜物箱的功能。客戶對(duì)把手的濫用力要求較高,通常為(245士4.9 N的載荷下持續(xù)10士1.0秒鐘時(shí),把手不能斷裂)。汽車儀表板雜物箱把手造型多變,強(qiáng)度影響因素多,結(jié)構(gòu)復(fù)雜
2018-04-17 16:42:460 品佳集團(tuán)推出以恩智浦(NXP)i.MX8X為基礎(chǔ)的汽車數(shù)碼儀表版解決方案。汽車制造商正從傳統(tǒng)的模擬儀表板轉(zhuǎn)變?yōu)橐燥@示屏幕為基礎(chǔ)的數(shù)碼儀表板,由于駕駛者可于汽車上查閱的信息日益增加,需要解決方案具備
2018-04-25 10:50:002114 據(jù)外媒報(bào)道,現(xiàn)代摩比斯于本周三(2018年5月9日)宣布,該公司開始推出帶數(shù)字顯示屏的儀表板(instrument clusters),為現(xiàn)代旗下的一款緊湊型SUV——現(xiàn)代Kona帶來了一款7英寸數(shù)字顯示屏。
2018-05-16 09:42:001383 采用瑞薩SH7264芯片面向數(shù)字儀表板的演示視頻,為您介紹尖端的數(shù)字儀表解決方案。
2018-06-15 09:15:003448 觀看采用飛思卡爾9S08LG32設(shè)計(jì)的最酷汽車LCD儀表板
2018-06-21 14:50:004322 
由瑞薩電子公司上海分公司周振齊講述:H8S2、28x汽車儀表板解決方案。
2018-06-14 05:14:004937 由瑞薩電子公司上海分公司吳頻吉講述:SH7264汽車數(shù)字儀表板解決方案。
2018-06-14 03:14:004072 SH7264汽車數(shù)字儀表板解決方案
2018-07-23 00:37:002805 H8S/228x汽車儀表板解決方案
2018-07-20 01:34:002811 了解Vivado 2015.1中引入的新儀表板改進(jìn),如何在Vivado Logic Analyzer中使用它們以及使用它們的好處。
2018-11-26 07:07:002777 轉(zhuǎn)到您的初始狀態(tài)帳戶并查看您的數(shù)據(jù)。我將所有百分比值更改為電弧規(guī),將液體壓力降至液位計(jì),將溫度更改為溫度計(jì)。您可以更改為任何類型的瓷磚類型,并選擇您的顏色和儀表。折線圖。您可以將儀表板設(shè)置為暗或亮,并使用嵌入式iFrame將最終產(chǎn)品嵌入到網(wǎng)站中。
2019-08-27 09:18:094869 
移動(dòng)設(shè)計(jì)為您提供了創(chuàng)造性的約束。在我最近與 Andy Kirk 的辯論中,他提出了一個(gè)很好的觀點(diǎn),即當(dāng)您有一個(gè)約束時(shí),例如小屏幕或靜態(tài)圖表,它會(huì)迫使您更清楚地思考自己的目的。移動(dòng)版儀表板也是如此 - 它迫使您對(duì)桌面版有一個(gè)明確的目的。
2019-12-02 16:11:532497 在現(xiàn)代社會(huì),汽車對(duì)人們生活的影響越來越大。隨著社會(huì)的發(fā)展,人們對(duì)汽車的要求也越來越高,不僅要求汽車有良好的使用性能,還要求汽車外飾內(nèi)飾的和諧統(tǒng)一,滿足審美要求。汽車的內(nèi)飾主要由塑料件構(gòu)成,因此汽車注塑模具的質(zhì)量是影響汽車內(nèi)外飾的重要因素。
2020-01-21 17:18:004965 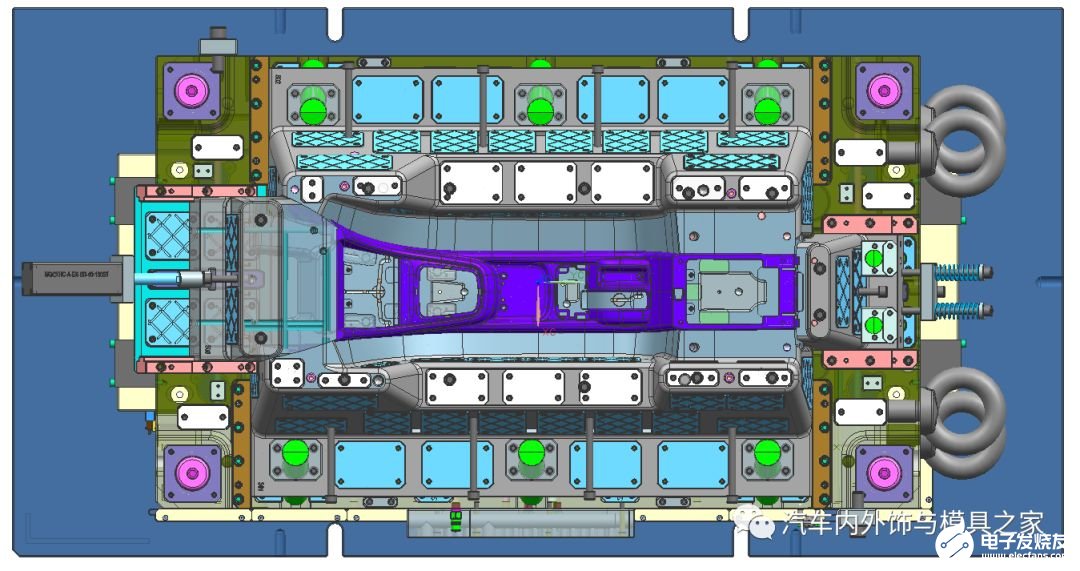
汽車儀表由各種儀表、指示器,特別是駕駛員用警示燈報(bào)警器等組成,為駕駛員提供所需的汽車運(yùn)行參數(shù)信息。按汽車儀表的工作原理不同,可大致分為三代。
2020-06-30 12:20:002373 ,儀表板已經(jīng)是數(shù)字化的了,耗電也更多了。
目前的大多數(shù)儀表板是數(shù)字的,將LCD和LED用作背光光源(圖3)。事實(shí)上,如果你只有一個(gè)3.5英寸顯示
2021-11-10 09:40:32876 
繼續(xù)改進(jìn)我們的 GPU 交叉過濾器儀表板庫 cuxfilter 的用戶體驗(yàn)和功能。下面簡要介紹一下它的最新功能。
2022-04-21 14:48:40873 
電子發(fā)燒友網(wǎng)站提供《W5500儀表板開源項(xiàng)目.zip》資料免費(fèi)下載
2022-08-08 11:33:348 電子發(fā)燒友網(wǎng)站提供《用于信息娛樂系統(tǒng)中汽車儀表板的CISPR 25 SEPIC轉(zhuǎn)換器.zip》資料免費(fèi)下載
2022-09-08 14:28:300 電子發(fā)燒友網(wǎng)站提供《用于汽車儀表板的CISPR 25 5類14W額定功率多路輸出電源.zip》資料免費(fèi)下載
2022-09-07 09:50:220 電子發(fā)燒友網(wǎng)站提供《帶有儀表和執(zhí)行器的IoT儀表板Web服務(wù)器.zip》資料免費(fèi)下載
2022-10-21 14:28:302 電子發(fā)燒友網(wǎng)站提供《賽車儀表板(在線連接)開源分享.zip》資料免費(fèi)下載
2022-10-27 09:57:190 電子發(fā)燒友網(wǎng)站提供《基于Azure云和儀表板的動(dòng)態(tài)心電圖監(jiān)測器.zip》資料免費(fèi)下載
2022-11-02 15:24:230 電子發(fā)燒友網(wǎng)站提供《數(shù)字儀表板開源分享.zip》資料免費(fèi)下載
2022-11-02 15:17:230 電子發(fā)燒友網(wǎng)站提供《Devolatus:護(hù)理院的智能物聯(lián)網(wǎng)儀表板.zip》資料免費(fèi)下載
2022-11-04 09:21:501 電子發(fā)燒友網(wǎng)站提供《電子墨水儀表板開源分享.zip》資料免費(fèi)下載
2022-11-21 10:22:450 電子發(fā)燒友網(wǎng)站提供《物聯(lián)網(wǎng)自動(dòng)化儀表板.zip》資料免費(fèi)下載
2022-12-14 09:33:540 電子發(fā)燒友網(wǎng)站提供《基于Pynq的汽車儀表板.zip》資料免費(fèi)下載
2022-12-20 09:25:290 Pynq Instrument Cluster,正如我們所說的那樣,是一個(gè)汽車混合儀表板,旨在成為 Xilinx 成本優(yōu)化產(chǎn)品組合的平臺(tái)演示者,以及在 GDL 的 Avnet 應(yīng)用程序團(tuán)隊(duì)中為客戶
2022-12-20 15:41:090 BAJA-SAE 在全球范圍內(nèi)組織活動(dòng),并邀請(qǐng)本科生參加。比賽包括在許多不同的挑戰(zhàn)中制造和運(yùn)行學(xué)生建造的全地形車輛。該項(xiàng)目最初開始為車手和維修站工作人員提供汽車性能的視覺展示。儀表板包括一個(gè)帶有內(nèi)置
2022-12-21 11:29:160 電子發(fā)燒友網(wǎng)站提供《大學(xué)教師儀表板開源分享.zip》資料免費(fèi)下載
2023-06-12 09:58:150 電子發(fā)燒友網(wǎng)站提供《基于OBD2的儀表板.zip》資料免費(fèi)下載
2023-06-16 14:51:151 電子發(fā)燒友網(wǎng)站提供《離線儀表板開源分享.zip》資料免費(fèi)下載
2023-06-16 09:57:050 電子發(fā)燒友網(wǎng)站提供《Arduino BME280氣象站儀表板.zip》資料免費(fèi)下載
2023-07-12 09:37:060 在我們開始電動(dòng)汽車儀表板改造之旅之前,讓我們花點(diǎn)時(shí)間了解一下Bunifu框架。Bunifu框架是一個(gè)多功能的UI工具包,為開發(fā)人員提供了豐富的預(yù)構(gòu)建控件、主題和自定義選項(xiàng)。它使開發(fā)人員能夠毫不費(fèi)力地制作現(xiàn)代且視覺上迷人的界面。
2023-08-07 15:29:46651 電子發(fā)燒友網(wǎng)站提供《基于嵌入式汽車數(shù)字儀表設(shè)計(jì).doc》資料免費(fèi)下載
2023-10-26 09:29:130
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論