 電子發(fā)燒友App
電子發(fā)燒友App


本來(lái)計(jì)劃使用 ART-Pi Smart 進(jìn)行車(chē)標(biāo)識(shí)別的,但是現(xiàn)在實(shí)際測(cè)試發(fā)現(xiàn)攝像頭采集的數(shù)據(jù)顯示有大概率抖動(dòng)的現(xiàn)象發(fā)生,所以實(shí)現(xiàn)了將攝像頭采集的數(shù)據(jù)以 bmp 圖片格式存儲(chǔ),然后發(fā)送到電腦端使用 tflite 格式的模型數(shù)據(jù)進(jìn)行測(cè)試。
第一部分,系統(tǒng)概述
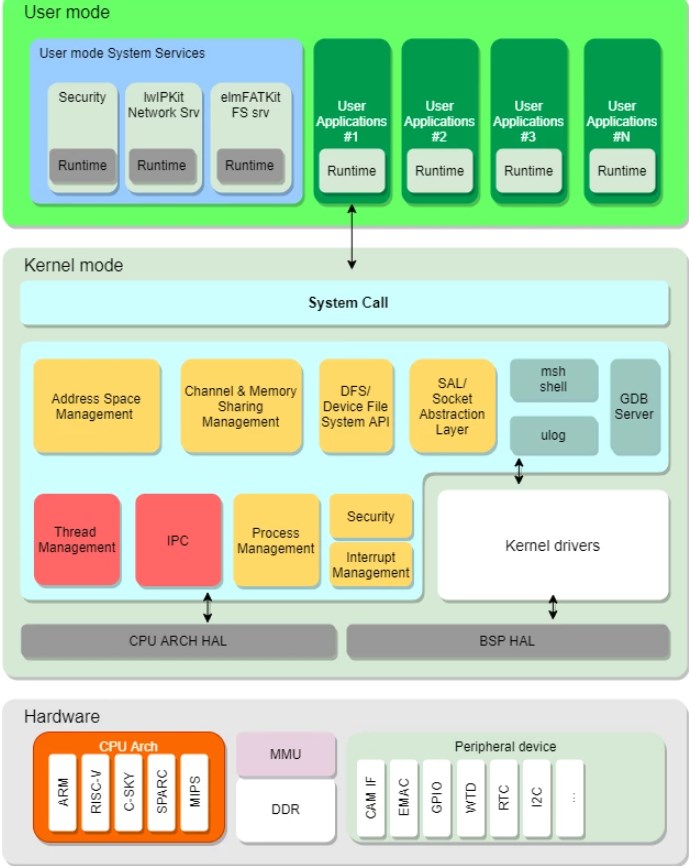
該項(xiàng)目實(shí)現(xiàn)了在 ART-Pi Smart 上通過(guò) OV5640 攝像頭采集視頻數(shù)據(jù),并以 bmp 格式圖片保存在設(shè)備端,然后借助 ART-Pi Smart webserver 服務(wù)將生成的 bmp 圖片下載到 PC,然后在 PC 端使用訓(xùn)練的 tflite 模型對(duì)下載的 bmp 圖片進(jìn)行預(yù)測(cè)輸出結(jié)果。
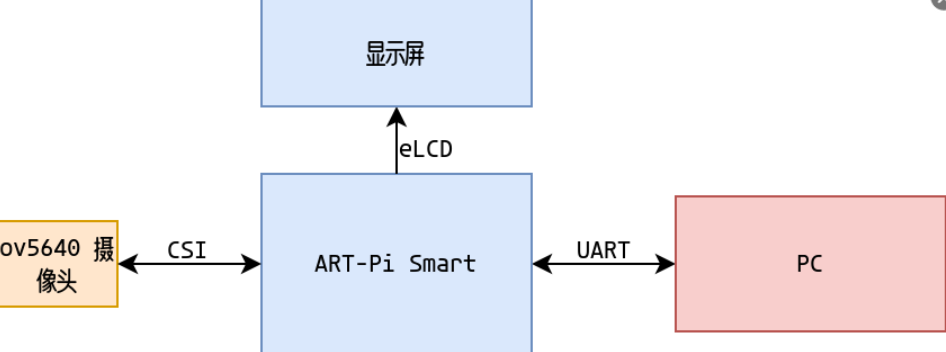
硬件框圖:
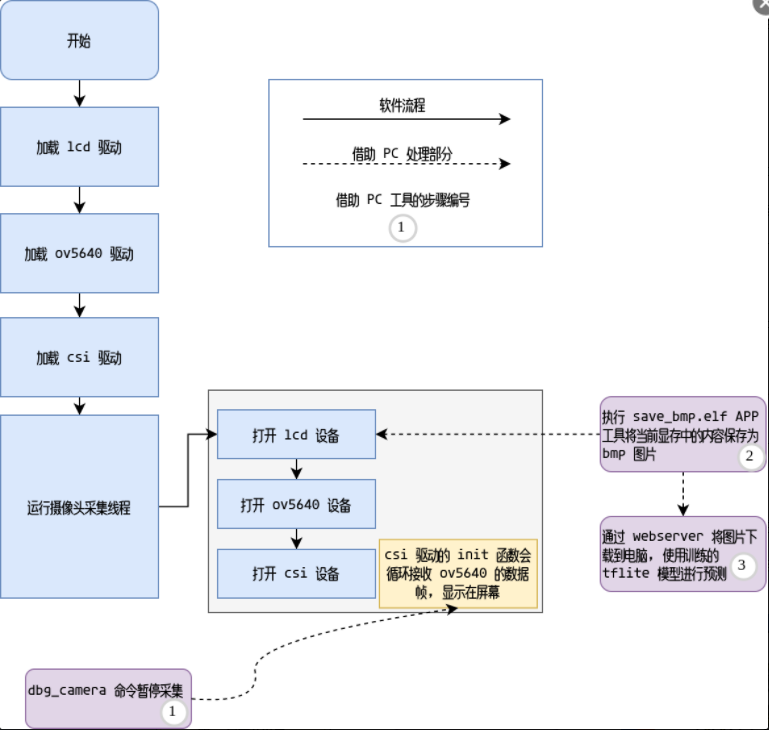
軟件框圖:
第二部分,系統(tǒng)流程
為了實(shí)現(xiàn)預(yù)期的目的,將系統(tǒng)流程分為如下幾個(gè)階段:
1、使用官方 demo 移植 tflite 到 ART-Pi Smart, 針對(duì)這部分內(nèi)容可以查看文章?在 ART-Pi Smart 上運(yùn)行 TensorFlow Lite
2、移植 TensorFLow 基礎(chǔ)的圖像分類(lèi)?mnist?的 demo 到 ART-Pi Smart,針對(duì)這部分內(nèi)容可以查看文章
3、使用 Kicad 設(shè)計(jì) ov5640 轉(zhuǎn)結(jié)板,并開(kāi)發(fā) ov5640 攝像頭驅(qū)動(dòng),在開(kāi)發(fā)這部分軟件的過(guò)程中,遇到了問(wèn)題,具體細(xì)節(jié)可以查看問(wèn)題ov5640 顯示效果不穩(wěn)定
4、使用攝像頭采集數(shù)據(jù)判斷是否有車(chē)輛信息
本節(jié)重點(diǎn)描述系統(tǒng)流程的第 4 部分,訓(xùn)練自己的模型檢測(cè)是否有車(chē)輛信息,這部分主要分為如下步驟:
1、從網(wǎng)上下載包含有車(chē)輛的圖片數(shù)據(jù)集和沒(méi)有車(chē)輛的數(shù)據(jù)集合(這部分內(nèi)容,我選擇了一些包含有花朵的數(shù)據(jù)集),通過(guò) python 將其批量轉(zhuǎn)換為屏幕分辨率的圖片,這部分代碼大概是這樣的:
!/usr/bin/env python
源數(shù)據(jù)的目錄
如果指定有源文件目錄,使用指定的源文件目錄

生成轉(zhuǎn)換后的源文件的目錄
最多轉(zhuǎn)換 1000 張圖片

修改原始圖片的分辨率
for i in range(src_image_len):
current_image_name = src_image_lists[i]
full_current_image_name = os.path.join(WEB_PICS, current_image_name)
target_image_name = current_image_name.split('.')[0]+'_convert.bmp'
full_target_image_name = os.path.join(TAREGT_PICS, target_image_name)
raw_image =Image.open(full_current_image_name)
image_L = raw_image.convert('L')
image = image_L.resize((480,272))
image.save(full_target_image_name)
print(np.array(image, dtype=np.float32, order=’C’).shape)
exit()
如圖所示,四個(gè)目錄分別是原始帶有車(chē)輛和沒(méi)有車(chē)輛的數(shù)據(jù)集目錄和轉(zhuǎn)換后的數(shù)據(jù)集目錄。
2.標(biāo)定帶有車(chē)輛的圖片和沒(méi)有車(chē)輛的圖片信息,使用 tensorflow 進(jìn)行訓(xùn)練,這部分代碼大概是這樣的:
``` python
#!/usr/bin/env python
# 車(chē)標(biāo)分類(lèi)算法
from PIL import Image
import os
MODELS_DIR = 'models/'
if not os.path.exists(MODELS_DIR):
os.mkdir(MODELS_DIR)
MODEL_TF = MODELS_DIR + 'model'
MODEL_NO_QUANT_TFLITE = MODELS_DIR + 'model_no_quant.tflite'
MODEL_TFLITE = MODELS_DIR + 'model.tflite'
MODEL_TFLITE_MICRO = MODELS_DIR + 'model.cc'
import tensorflow as tf
from tensorflow import keras
import numpy as np
import matplotlib.pyplot as plt
from sklearn.model_selection import train_test_split
TRAIN_IMAGES_COUNTS = 1000
whole_train_images = np.ones((2 * TRAIN_IMAGES_COUNTS , 480, 272), dtype=np.float32)
whole_train_labels = np.ones((2 * TRAIN_IMAGES_COUNTS , ), dtype=np.float32)
#test_images = np.ones((2 * TEST_IMAGES_COUNTS , 480, 272), dtype=np.float32)
#test_labels = np.ones((2 * TEST_IMAGES_COUNTS , ), dtype=np.float32)
CAR_CONVERT_PICS = 'cars_train_convert_sets'
FLOWER_TAREGT_PICS = 'flowers_convert_sets'
# 矩陣行列交換
def transpose_2d(data):
# transposed = list(zip(*data))
# [(1, 5, 9), (2, 6, 10), (3, 7, 11), (4, 8, 12)]
# 注意 zip 本身返回的數(shù)據(jù)類(lèi)型為 tuple 元組
# 其中符號(hào) * 號(hào)可以對(duì)元素進(jìn)行解壓或展開(kāi)
transposed = list(map(list, zip(*data)))
return transposed
whole_train_sets_index = 0
def merge_whole_train_sets(src, type):
global whole_train_sets_index
src_image_lists = os.listdir(src)
for i in range(TRAIN_IMAGES_COUNTS):
full_current_image_name = os.path.join(src, src_image_lists[i])
#print(full_current_image_name)
raw_image = Image.open(full_current_image_name)
#print(type(raw_image.convert('RGB')))
temp_whole_train_images = np.array(raw_image, dtype=np.float32)
whole_train_images[whole_train_sets_index] = np.array(transpose_2d(temp_whole_train_images), dtype=np.float32)
whole_train_labels[whole_train_sets_index] = type
whole_train_sets_index = whole_train_sets_index + 1
merge_whole_train_sets(CAR_CONVERT_PICS, 1)
merge_whole_train_sets(FLOWER_TAREGT_PICS, 0)
print(whole_train_labels)
print(type(whole_train_images), whole_train_images.shape)
print(type(whole_train_labels), whole_train_labels.shape)
train_images, test_images = train_test_split(whole_train_images, train_size=0.8, random_state=10)
train_labels, test_labels = train_test_split(whole_train_labels, train_size=0.8, random_state=10)
print(type(train_images), type(train_labels))
print(train_images.shape, train_labels.shape)
class_names = ['nocar', 'car']
if False:
plt.figure(figsize=(10,10))
for i in range(25):
plt.subplot(5,5,i+1)
plt.xticks([])
plt.yticks([])
plt.grid(False)
plt.imshow(train_images[i], cmap=plt.cm.binary)
plt.xlabel(class_names[train_labels[i]])
plt.show()
#exit()
#train_images = train_images
#test_images = test_images
#train_images = np.array(train_images, dtype=np.float32)
#plt.figure(figsize=(10,10))
#for i in range(25):
# plt.subplot(5,5,i+1)
# plt.xticks([])
# plt.yticks([])
# plt.grid(False)
# plt.imshow(train_images[i], cmap=plt.cm.binary)
# plt.xlabel(class_names[train_labels[i]])
#plt.show()
model = tf.keras.Sequential([
tf.keras.layers.Flatten(input_shape=(480, 272)),
tf.keras.layers.Dense(128, activation='relu'),
tf.keras.layers.Dense(2)
])
model.compile(optimizer='adam',
loss=tf.keras.losses.SparseCategoricalCrossentropy(from_logits=True),
metrics=['accuracy'])
# 如果模型已經(jīng)存在,加載整個(gè)模型
if os.path.exists(MODELS_DIR) and os.path.exists(MODEL_TF) and 0 != len(os.listdir(MODEL_TF)):
try:
#model.load_weights(MODEL_TF + 'saved_model.pb')
model = keras.models.load_model(MODEL_TF)
except:
print("load weights failed")
exit()
# 訓(xùn)練模型
else:
print(f"{MODEL_TF} no exist ???")
model.fit(train_images, train_labels, epochs=10)
# 查看 model 概要
print(model.summary())
# 測(cè)試模型
test_loss, test_acc = model.evaluate(test_images, test_labels, verbose=2)
print(' Test accuracy:', test_acc)
probability_model = tf.keras.Sequential([model,
tf.keras.layers.Softmax()])
predictions = probability_model.predict(test_images)
print(type(test_images), test_images.shape, " red")
print(predictions[0])
#exit()
# 測(cè)試自定義圖片
from PIL import Image
import sys
IMG_SRC = 'flowers/image_1111.jpg'
IMG_TARGET = IMG_SRC.split('/')[-1].split('.')[0] + '_gry_test' + '.bmp'
print(IMG_TARGET)
raw_image = Image.open(IMG_SRC)
image = raw_image.resize((480, 272))
image_gray = image.convert('L')
image_gray_array = np.array(image_gray, dtype=np.float32)
image_gray_array = np.array(transpose_2d(image_gray_array), dtype=np.float32).reshape(1,480,272)
#image_gray_array = image_gray_array / 255.0
image_gray.save(IMG_TARGET)
predictions = probability_model.predict(image_gray_array)
print("red prefictions")
print(predictions[0])
plt.figure()
plt.subplot(2,1,1)
plt.imshow(test_images[0], cmap=plt.cm.binary)
print(test_labels[0], "oh no red")
plt.subplot(2,1,2)
plt.imshow(raw_image, cmap=plt.cm.binary)
plt.show()
#exit()
#plt.figure(figsize=(10,10))
#plt.xticks([])
#plt.yticks([])
#plt.grid(False)
#plt.imshow(test_images[0], cmap=plt.cm.binary)
#plt.show()
# Save the model to disk
model.save(MODEL_TF)
# Convert the model to the TensorFlow Lite format without quantization
converter = tf.lite.TFLiteConverter.from_saved_model(MODEL_TF)
model_no_quant_tflite = converter.convert()
# Save the model to disk
open(MODEL_NO_QUANT_TFLITE, "wb").write(model_no_quant_tflite)
# Convert the model to the TensorFlow Lite format with quantization
def representative_dataset():
for i in range(500):
# 強(qiáng)制轉(zhuǎn)換為 float32 類(lèi)型
array = np.array(train_images[i], dtype=np.float32)
#print(array.shape, "red dbg")
#print(type(train_images[0].dtype), type(array[0].dtype), type(array), len(array))
yield([array])
# Set the optimization flag.
converter.optimizations = [tf.lite.Optimize.DEFAULT]
# Enforce integer only quantization
converter.target_spec.supported_ops = [tf.lite.OpsSet.TFLITE_BUILTINS_INT8]
converter.inference_input_type = tf.float32
converter.inference_output_type = tf.float32
# Provide a representative dataset to ensure we quantize correctly.
converter.representative_dataset = representative_dataset
# 轉(zhuǎn)換為 tflite 模型
model_tflite = converter.convert()
# Save the model to disk
open(MODEL_TFLITE, "wb").write(model_tflite)
該函數(shù)可以訓(xùn)練模型導(dǎo)出 model.tflite 到 models 目錄:

因?yàn)檩斎氲?tensor 有 480*272 個(gè),所以導(dǎo)致模型特別巨大,發(fā)現(xiàn)直接編譯出的 rtthread.bin 有 16MB 左右,通過(guò) tftp 下載后無(wú)法正常運(yùn)行,就只能使用這個(gè)模型在 PC 端對(duì) ov5640 采集的圖片進(jìn)行識(shí)別了。
1、開(kāi)發(fā) save_bmp.elf 工具,支持將當(dāng)前顯存的內(nèi)容保存到 bmp 圖片中,這部分代碼大概這樣,下述 demo 簡(jiǎn)單完成了使用顯存內(nèi)容對(duì)原始 bmp 圖片的重寫(xiě):
/*
* Copyright (c) 2006-2022, RT-Thread Development Team
*
* SPDX-License-Identifier: GPL-2.0
*
* Change Logs:
* Date Author Notes
* 2022-05-05 iysheng The first version
*/
#include
#include
#include"rtdef.h"
#include
#include"rt_lcd.h"
typedefunsignedcharuint8_t;
typedefunsignedshortuint16_t;
typedefunsignedintuint32_t;
typedefintint32_t;
#define LCD_WIDTH 480
#define LCD_HEIGHT 272
#define LCD_BUF_SIZE (LCD_WIDTH * LCD_HEIGHT)
rt_uint16_t pixel_ptr[LCD_BUF_SIZE];
rt_device_t lcd = NULL;
struct fb_fix_screeninfo f_info;
struct fb_var_screeninfo v_info;
int rt_smart_lcdinit(void)
{
rt_err_t ret =-1;
lcd = rt_device_find("lcd");
if(!lcd)return1;
ret = rt_device_open(lcd, RT_DEVICE_OFLAG_RDWR);
if(-1==ret)return1;
rt_device_control(lcd, FBIOGET_FSCREENINFO,&f_info);
printf("screen: %s - 0x%08x, size %d ", f_info.id,(unsignedint)f_info.smem_start, f_info.smem_len);
rt_device_control(lcd, FBIOGET_VSCREENINFO,&v_info);
printf("screen: bpp %d, width - %d, height - %d ", v_info.bits_per_pixel, v_info.xres, v_info.yres);
return ret;
}
#pragma pack(1)
struct bmp_header {
uint16_t file_type;// File type always BM which is 0x4D42
uint32_t file_size;// Size of the file (in bytes)
uint16_t reserved1;// Reserved, always 0
uint16_t reserved2;// Reserved, always 0
uint32_t offset_data;// Start position of pixel data (bytes from the beginning of the file)
};
struct windows_bmp_info_header {
uint32_t size;// Size of this header (in bytes)
int32_t width;// width of bitmap in pixels
int32_t height;// width of bitmap in pixels
uint16_t planes;// No. of planes for the target device, this is always 1
uint16_t bit_count;// No. of bits per pixel
uint32_t compression;// 0 or 3 - uncompressed. THIS PROGRAM CONSIDERS ONLY UNCOMPRESSED BMP images
uint32_t size_image;// 0 - for uncompressed images
int32_t x_pixels_per_meter;
int32_t y_pixels_per_meter;
uint32_t colors_used;// No. color indexes in the color table. Use 0 for the max number of colors allowed by bit_count
uint32_t colors_important;// No. of colors used for displaying the bitmap. If 0 all colors are required
};
#define RED_TFLITE_CONVERT 10
int get_bmp_at(struct fb_fix_screeninfo *finfo,struct fb_var_screeninfo *vinfo,struct windows_bmp_info_header *header,uint8_t*buffer,uint8_t bytes)
{
int32_t x, y, i =0;
uint16_t pix_tmp =0;
vinfo->xres =0;
vinfo->yres =0;
for(y = header->height; y >0; y--)
{
for(x =0; x < header->width; x++)
{
if(1== bytes)
{
buffer[i++]=*((uint16_t*)finfo->smem_start +(y -1+ vinfo->yres)* LCD_WIDTH + vinfo->xres + x);
}
elseif(2== bytes)
{
pix_tmp =*((uint16_t*)finfo->smem_start +(y -1+ vinfo->yres)* LCD_WIDTH + vinfo->xres + x);
buffer[i]= pix_tmp;
buffer[i +1]= pix_tmp >>8;
i +=2;
}
else
{
printf("error: no support this format ");
return-1;
}
}
}
/* TODO flush */
rt_device_control(lcd, RED_TFLITE_CONVERT, NULL);
return0;
}
void show_hex(uint8_t* buffer,uint16_t buffer_len,char*title)
{
uint16_t i =0;
printf("[%s](%hu)", title, buffer_len);
for(i =0; i < buffer_len; i++)
{
printf("%x ", buffer[i]);
}
printf(" ");
}
uint8_t bmp9696[480*272*2];
int main(int argc,char**argv)
{
FILE *fp;
/* 屏幕顯示起始地址 */
__attribute__((unused))int display_pos;
struct bmp_header t_bmp_header;
struct windows_bmp_info_header t_bmp_info_header;
int num;
if(0!= rt_smart_lcdinit())
{
printf("Failed init lcd. ");
return-3;
}
else
{
printf("init lcd ok ");
}
if(argc ==2)
{
printf("use default display width height and addr ");
}
elseif(argc ==3)
{
printf("ruse default display width height ");
}
elseif(argc ==4)
{
printf("use default display addr ");
}
elseif(argc ==5)
{
display_pos = atoi(argv[4]);
}
else
{
printf("Usage:show_bmp xxx.bmp 96 96 [pos]! ");
return-1;
}
fp = fopen(argv[1],"r+");
if(!fp)
{
printf("Failed open file:%s as:r+ ", argv[1]);
return-2;
}
num = fread(&t_bmp_header,1,sizeof(t_bmp_header), fp);
if(num !=sizeof(t_bmp_header))
{
printf("Read data len mismatch, please check:%d ", num);
return-3;
}
else
{
show_hex((uint8_t*)&t_bmp_header, num,"dbg_header");
printf("size=%u offset=%u ", t_bmp_header.file_size, t_bmp_header.offset_data);
}
display_pos = t_bmp_header.offset_data;
printf("size header:%u infoheader:%u ",sizeof(t_bmp_header),sizeof(t_bmp_info_header));
num = fread(&t_bmp_info_header,1,sizeof(t_bmp_info_header), fp);
if(num !=sizeof(t_bmp_info_header))
{
printf("Read data len mismatch, please check:%d ", num);
return-4;
}
else
{
printf("width=%u height=%u ", t_bmp_info_header.width, t_bmp_info_header.height);
}
/* seek offset positon */
fseek(fp, t_bmp_header.offset_data, SEEK_SET);
get_bmp_at(&f_info,&v_info,&t_bmp_info_header, bmp9696, t_bmp_info_header.bit_count /8);
num = fwrite(bmp9696,1, t_bmp_info_header.width * t_bmp_info_header.height * t_bmp_info_header.bit_count >>3, fp);
if(num != t_bmp_info_header.width * t_bmp_info_header.height * t_bmp_info_header.bit_count >>3)
{
printf("bmp raw data mismatch. ");
return-5;
}
else
{
printf("save bmp ok");
fclose(fp);
}
return0;
}
2、實(shí)驗(yàn),我使用了一個(gè)卡車(chē)模型進(jìn)行采集,現(xiàn)場(chǎng)是這樣的:

采集回來(lái)的圖片是這樣的:
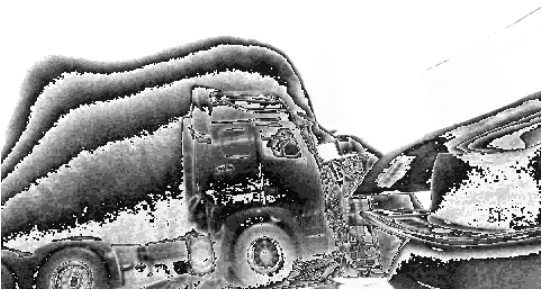
隱約可以從這個(gè)灰度圖中看出來(lái)卡車(chē)模型的輪廓,接下來(lái)使用 tflite 的模型對(duì)這個(gè)圖片進(jìn)行預(yù)測(cè),結(jié)果可以看出來(lái)識(shí)別到這個(gè)圖片中包含有車(chē):

為了做對(duì)比,再采集一張有花朵的圖片,進(jìn)行預(yù)測(cè),現(xiàn)場(chǎng)是這樣的:

對(duì)攝像頭采集的圖片進(jìn)行捕捉,保存到一個(gè)灰度 bmp 圖片:

結(jié)果是:

可以看出正確識(shí)別除了是花還是汽車(chē)。
至此本次項(xiàng)目暫時(shí)告一段落了,通過(guò)這次試用,主要收獲有兩個(gè)方面:
1、通過(guò)實(shí)際對(duì)機(jī)器學(xué)習(xí)遷移到嵌入式設(shè)備端這個(gè)過(guò)程的接觸,對(duì)在邊緣節(jié)點(diǎn)進(jìn)行機(jī)器學(xué)習(xí)有了一個(gè)基礎(chǔ)的認(rèn)識(shí);
2、通過(guò)這次對(duì) ov5640 攝像頭的調(diào)試,對(duì) CSI 接口攝像頭的圖像采集以及顯示有了一個(gè)更深入的理解;
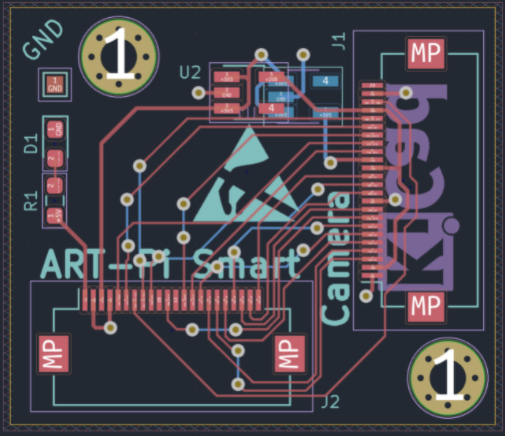
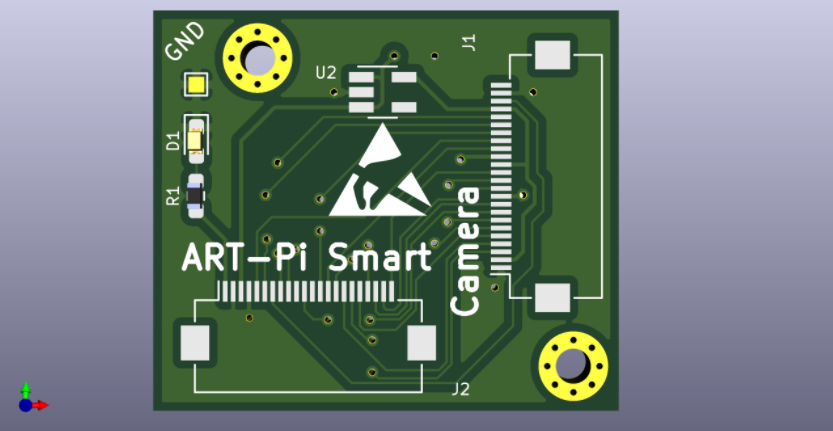
目前還有部分未完成的工作,對(duì)攝像頭采集的圖像效果不是特別滿(mǎn)意,目前分析可能是 ART-Pi Smart 到轉(zhuǎn)接板之間排線有點(diǎn)長(zhǎng)(我選的是10cm的)對(duì)顯示信號(hào)(有高頻 50MHz 附近的 PCLK 時(shí)鐘)有干擾,轉(zhuǎn)接板沒(méi)有處理好高頻信號(hào)導(dǎo)致的,看一下轉(zhuǎn)接板 PCB 和 3D 是這樣的。
審核編輯:劉清











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論