世界上第一臺(tái)真正意義上的移動(dòng)機(jī)器人是斯坦福研究院(SRI)的人工智能中心于1966年到1972年研制的,名叫Shakey,它裝備了電視攝像機(jī)、三角測(cè)距儀、碰撞傳感器、驅(qū)動(dòng)電機(jī)以及編碼器,并通過無線通訊系統(tǒng)由二臺(tái)計(jì)算機(jī)控制,可以進(jìn)行簡(jiǎn)單的自主導(dǎo)航。
2016-05-25 09:57:53 2099
2099 大多數(shù)無人機(jī)利用全球導(dǎo)航衛(wèi)星系統(tǒng)(GNSS)技術(shù)和慣性傳感器(INS)來估計(jì)自己的地理空間定位。無人機(jī)通過GNSS接收器進(jìn)行增強(qiáng),這些接收器受益于從衛(wèi)星發(fā)射的接收時(shí)間無線電信號(hào)來計(jì)算位置(經(jīng)度,緯度
2022-11-18 11:44:45687 電子發(fā)燒友網(wǎng)報(bào)道(文/李寧遠(yuǎn))對(duì)具有移動(dòng)功能的機(jī)器人來說,導(dǎo)航是一直不會(huì)過時(shí)的熱點(diǎn)。與帶有自動(dòng)駕駛功能的汽車相比,機(jī)器人的自動(dòng)駕駛自主導(dǎo)航受限于本體的體積和成本,運(yùn)用在其上的傳感器既要控制體積也要
2022-08-20 08:46:001734 通過編碼器獲得輪式里程計(jì)的測(cè)量數(shù)據(jù),車輪的轉(zhuǎn)動(dòng)被轉(zhuǎn)換成線性位移。對(duì)于指定初始位置的運(yùn)動(dòng)估計(jì),通過積分得運(yùn)動(dòng)增量,從而得到當(dāng)前的位置信息。 · 該方法具有精度短、成本低、采樣率高的優(yōu)點(diǎn) · 但車輪會(huì)產(chǎn)生打滑,定位誤差會(huì)隨著移動(dòng)距離增加,影響長(zhǎng)期精度 (2)慣性導(dǎo)航 慣性導(dǎo)航系統(tǒng)是自主的,..
2021-09-01 07:15:25
技術(shù)先進(jìn)的無反射板激光導(dǎo)航移動(dòng)平臺(tái)。同時(shí)為這些相關(guān)行業(yè)提供智慧物流以及倉儲(chǔ)系統(tǒng)解決方案。 蘇州智偉達(dá)機(jī)器人科技有限公司根據(jù)LNM自主導(dǎo)航解決方案自主研發(fā)激光導(dǎo)航AGV底盤定制 利用激光雷達(dá)構(gòu)建室內(nèi)地圖、實(shí)現(xiàn)
2017-06-10 14:24:17
激光雷達(dá)或者二維深度傳感器就可以自主構(gòu)圖并自主規(guī)劃路徑,可在室內(nèi)真正的實(shí)現(xiàn)機(jī)器人的無軌自主導(dǎo)航。LNM是一款模塊化的產(chǎn)品,多種通信端口的配置使其能夠適用于市面上絕大多數(shù)產(chǎn)品。LNM優(yōu)化了現(xiàn)有市場(chǎng)循跡導(dǎo)航
2017-06-10 14:07:17
價(jià)格大概在30多萬。與此同時(shí),蘇州智偉達(dá)機(jī)器人自主研發(fā)一款激光導(dǎo)航模塊,打斷了國(guó)外激光導(dǎo)航agv的高價(jià)壟斷!`
2017-07-31 11:43:49
在很多人印象中激光雷達(dá)還是那個(gè)通過旋轉(zhuǎn)完成激光測(cè)距幫助機(jī)器人完成定位、建圖輔助后續(xù)導(dǎo)航的激光傳感器RPLIDAR定位建圖 但其實(shí),除了可以應(yīng)用在機(jī)器人定位建圖、自主導(dǎo)航、障礙物檢測(cè)與規(guī)避等領(lǐng)域外他
2018-05-11 15:33:44
自主導(dǎo)航小車AGV定位方法的研究[1]
2016-08-29 11:07:35
是激光雷達(dá)+SLAM的定位導(dǎo)航技術(shù)。 SLAM表示在不具備周圍環(huán)境信息的前提下,讓移動(dòng)機(jī)器人在運(yùn)動(dòng)過程中根據(jù)自身攜帶的傳感器和對(duì)周圍環(huán)境的感知進(jìn)行自身定位,同時(shí)增量式構(gòu)建周圍環(huán)境地圖。SLAM可以提高
2018-11-09 15:59:01
和即時(shí)定位問題,而自主導(dǎo)航需要解決的是智能移動(dòng)機(jī)器人與環(huán)境進(jìn)行自主交互,尤其是點(diǎn)到點(diǎn)自主移動(dòng)的問題,這需要更多的技術(shù)支持。 要想解決機(jī)器人智能移動(dòng)這個(gè)問題,除了要有SLAM技術(shù)之外,還需要加入路徑規(guī)劃
2018-08-24 16:56:24
5月18日,中國(guó)衛(wèi)星導(dǎo)航定位協(xié)會(huì)在京發(fā)布《2023中國(guó)衛(wèi)星導(dǎo)航與位置服務(wù)產(chǎn)業(yè)發(fā)展白皮書》。白皮書顯示,2022年我國(guó)衛(wèi)星導(dǎo)航與位置服務(wù)產(chǎn)業(yè)總體產(chǎn)值達(dá)到5007億元人民幣,較2021年增長(zhǎng)6.76
2023-09-11 09:35:53
飛行器,還有智能潛艇。非常試試這塊性能強(qiáng)大的hikey開發(fā)板,看看處理器之間的差距有多大。項(xiàng)目描述:基于激光雷達(dá)對(duì)房間進(jìn)行掃描建模,重構(gòu)地圖,并且進(jìn)行路徑規(guī)劃與重構(gòu),自主導(dǎo)航。同時(shí)用戶可以 利用WIFI
2016-04-05 12:17:40
【LicheeRV-Nano開發(fā)套件試用連載體驗(yàn)】+ 實(shí)現(xiàn)三麥克納姆輪小車自主導(dǎo)航
非常感謝被選中成為Sipeed矽速科技、電子發(fā)燒友論壇組織的此次試用體驗(yàn)幸運(yùn)兒,有機(jī)會(huì)參與
2024-03-03 14:20:58
ArmLinux平臺(tái)上某小型無人機(jī)飛行控制系統(tǒng)的特定對(duì)象,構(gòu)建基于Rhapsody的飛控軟件開發(fā)平臺(tái)。3.使用UML相關(guān)模型對(duì)飛行控制軟件系統(tǒng)進(jìn)行需求分析及建模、建立整個(gè)飛控軟件系統(tǒng)的靜態(tài)結(jié)構(gòu)。其中包括用例圖描述
2015-07-15 16:02:45
到達(dá)指定位置、機(jī)器人定時(shí)巡邏、跟隨等等,于是有了機(jī)器人實(shí)時(shí)定位與導(dǎo)航。定位定位算法使用自適應(yīng)的蒙特卡洛(AMCL),蒙特卡洛是一種經(jīng)典的粒子濾波算法,它適應(yīng)于局部定位和全局定位兩類問題,自適應(yīng)解決了
2019-08-21 22:12:16
硬件進(jìn)行交互。
在自主導(dǎo)航系統(tǒng)中,SLAM技術(shù)是通過激光雷達(dá)傳感器,獲取周圍環(huán)境的信息,實(shí)現(xiàn)即時(shí)定位與地圖構(gòu)建的過程。相比于視覺傳感器,激光雷達(dá)傳感器不受環(huán)境光照的影響,對(duì)障礙物識(shí)別準(zhǔn)確度與可靠性高
2023-06-28 09:36:32
的圖像信息和機(jī)器人的實(shí)際位置聯(lián)系起來,完成機(jī)器人的自主導(dǎo)航定位功能。但該技術(shù)圖像處理量巨大,一般計(jì)算機(jī)無法完成運(yùn)算,實(shí)時(shí)性比較差,且容易受光線條件限制,無法在黑暗環(huán)境中進(jìn)行工作。 3.紅外線定位導(dǎo)航紅外線
2018-10-11 17:49:40
和Neytiri對(duì)世界美好的愿望和共同的追求,使雙方互相看到了地球人和納威人之間不可分割的聯(lián)系,而觀眾則通過先進(jìn)的3D視頻處理技術(shù),觀賞到了3D電影的逼真效果,感受到這部電影帶來的震撼。那么有誰知道,為什么說FPGA主導(dǎo)了3D視頻處理市場(chǎng)呢?
2019-08-06 08:26:38
北京時(shí)間2003年5月25日零時(shí)34分,我國(guó)在西昌衛(wèi)星發(fā)射中心用"長(zhǎng)征三號(hào)甲"運(yùn)載火箭,成功地將我國(guó)自行研制的第三顆"北斗一號(hào)"導(dǎo)航定位衛(wèi)星送入太空。這標(biāo)志著我國(guó)已建立了完善的自主衛(wèi)星導(dǎo)航系統(tǒng),對(duì)我國(guó)國(guó)民經(jīng)濟(jì)建設(shè)將起到積極作用。
2019-08-23 06:48:38
我自己了解ARM不是很多,想問一下大家,最近想做一個(gè)基于雙目視覺的避障自主導(dǎo)航無人車,我想在ARM上面搭載GPS模塊,實(shí)現(xiàn)無人車自動(dòng)導(dǎo)航功能,另一方面我還想利用車載PC的OpenCV在處理完雙目
2017-03-18 13:19:01
`http://www.eupes.net北斗衛(wèi)星導(dǎo)航系統(tǒng)新聞發(fā)言人冉承其昨天在國(guó)新辦發(fā)布會(huì)上宣布,北斗衛(wèi)星導(dǎo)航系統(tǒng)即日起向亞太大部分地區(qū)正式提供區(qū)域服務(wù)。冉承其介紹,提供試運(yùn)行服務(wù)一年以來,北斗
2012-12-28 11:12:39
放置到虛擬環(huán)境中,使用gmapping 和 hector_slam功能包實(shí)現(xiàn)SLAM仿真。在第一題建立完成的地圖上,實(shí)現(xiàn)基于move_base和amcl功能包的機(jī)器人自主導(dǎo)航仿真。源碼可在git...
2021-12-17 07:06:59
車輛定位導(dǎo)航技術(shù)概述 ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 62 . 3 車載定位導(dǎo)航系統(tǒng)的方案設(shè)計(jì) ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 1
2009-04-17 11:38:56
對(duì)于在室外環(huán)境工作的移動(dòng)機(jī)器人通常使用慣導(dǎo)/衛(wèi)星組合導(dǎo)航方式。慣性導(dǎo)航系統(tǒng)具有完全自主、抗干擾強(qiáng)、隱蔽能力好和輸出參數(shù)全面等優(yōu)點(diǎn),但它的魯棒性極低,誤差會(huì)不斷隨時(shí)間累積發(fā)散。衛(wèi)星導(dǎo)航系統(tǒng)具有
2019-07-11 07:08:49
、導(dǎo)航類軟件技術(shù)及應(yīng)用的日趨成熟,為室內(nèi)定位技術(shù)提供了有力支撐和廣闊的市場(chǎng)。室內(nèi)定位應(yīng)用市場(chǎng)順應(yīng)了數(shù)字化時(shí)代企業(yè)智能化升級(jí)需求。未來,室內(nèi)定位系統(tǒng)前景廣闊,市場(chǎng)將呈現(xiàn)爆炸式成長(zhǎng)趨勢(shì)。 應(yīng)用方向 1、智能
2018-11-02 16:44:34
開源自主導(dǎo)航小車MickX41 小車底盤1.1 底盤機(jī)械組裝1.2 底盤硬件框圖2 電氣系統(tǒng)搭建本系列教程意在分享自己學(xué)習(xí)ROS自主導(dǎo)航小車時(shí)候的筆記,教程內(nèi)容包含了從零開始搭建一個(gè)四輪的小車
2021-08-06 07:08:33
,感知到障礙物的存在。自主導(dǎo)航與尋路利用激光SLAM可以在感知到障礙物的存在下避開障礙物,自主尋路和導(dǎo)航,實(shí)現(xiàn)智能移動(dòng)。RPLIDAR A1 作為思嵐科技第一款低成本激光雷達(dá)傳感器,為思嵐在行業(yè)的布局
2021-11-12 14:12:43
。 RPLIDAR S1的誕生,源自于思嵐科技多年對(duì)自主定位導(dǎo)航技術(shù)的高性能需求,經(jīng)過革命性提升的RPLIDAR S1將會(huì)帶領(lǐng)機(jī)器人導(dǎo)航效果到達(dá)一個(gè)新層次。相信未來,思嵐科技也將會(huì)不斷刷新激光雷達(dá)性能的極限。
2019-04-23 15:48:16
汽車也稱作智能汽車,即環(huán)境感知、路徑規(guī)劃、行為決策、自主控制能力的智能車輛平臺(tái)。其關(guān)鍵技術(shù)主要有兩個(gè)方面:車輛定位和車輛控制技術(shù)。無人駕駛技術(shù)實(shí)現(xiàn)手段是在車上安裝攝像頭、雷達(dá)傳感器和激光探測(cè)器等先進(jìn)
2014-11-11 11:21:30
,導(dǎo)航指示信號(hào)類型,導(dǎo)航地域等因素的不同,可以分為基于地圖導(dǎo)航,基于視覺導(dǎo)航,基于傳感器導(dǎo)航、GPS衛(wèi)星導(dǎo)航等。無論采用哪種導(dǎo)航方法,智能輪椅都應(yīng)具有路徑規(guī)劃與避障,探測(cè)與定位等功能。輪椅自主導(dǎo)航主要由環(huán)境感知自定位運(yùn)動(dòng)路徑規(guī)劃和目標(biāo)確定等幾個(gè)功能模塊組成。
2023-09-25 07:13:35
一.機(jī)器人導(dǎo)航算法工程師崗位職責(zé):1. 負(fù)責(zé)機(jī)器人視覺或激光雷達(dá)的SLAM算法的研發(fā)和優(yōu)化;2. 負(fù)責(zé)機(jī)器人自主導(dǎo)航定位算法的研發(fā),主要包括基于深度相機(jī)或激光雷達(dá)、IMU、里程計(jì)等多傳感器信息融合
2020-06-08 05:06:44
)、激光雷達(dá)(現(xiàn)在)繪制出來。SLAM在實(shí)際應(yīng)用時(shí)究竟是如何實(shí)現(xiàn)的?這是一個(gè)完整的SLAM和導(dǎo)航系統(tǒng)的主要架構(gòu)圖: 其中,SLAM核心過程包括3個(gè)步驟,第一步稱為預(yù)處理。我們知道,激光雷達(dá)和其他雷達(dá)設(shè)備一樣
2018-10-10 16:29:21
預(yù)期; 自主尋路導(dǎo)航與運(yùn)動(dòng)控制帶有多種導(dǎo)航和運(yùn)動(dòng)控制算法,輕松實(shí)現(xiàn)機(jī)器人虛擬墻、虛擬軌道、自主導(dǎo)航和障礙物規(guī)避等功能;采用特色的D*路徑規(guī)劃系統(tǒng),實(shí)現(xiàn)邊行走邊建圖;支持多傳感器融合支持接入如深度攝像頭
2018-01-03 11:41:55
http://www.uicctech.com/ 磁導(dǎo)航傳感器主要運(yùn)用于自主導(dǎo)航機(jī)器人、室內(nèi)室外巡檢機(jī)器人、自主導(dǎo)航運(yùn)輸車AGV(AGC)、自動(dòng)手推車等自主導(dǎo)航設(shè)備,完成自主導(dǎo)航設(shè)備的預(yù)設(shè)運(yùn)行
2016-03-30 11:29:32
激光雷達(dá)的硬件成本,比如研發(fā)固態(tài)激光雷達(dá)并真正實(shí)現(xiàn)產(chǎn)業(yè)化,屆時(shí)成本會(huì)下降到幾百美金。總之,現(xiàn)在自動(dòng)駕駛領(lǐng)域有三大核心問題需要著力突破:即利用人工智能,尤其是利用深度學(xué)習(xí)進(jìn)行目標(biāo)識(shí)別、自主導(dǎo)航和信息融合,這
2017-09-06 11:36:58
的精度相對(duì)較高,方向性較好,且基本不受環(huán)境可見光變化的影響,因此無論在室內(nèi)還是室外環(huán)境下的移動(dòng)機(jī)器人的導(dǎo)航研究中都得到了廣泛應(yīng)用。根據(jù)掃描機(jī)構(gòu)的不同,激光測(cè)距雷達(dá)可分為3D和2D兩種。其中,3D激光測(cè)距
2018-09-10 16:32:46
怎么設(shè)計(jì)一種室外移動(dòng)機(jī)器人組合導(dǎo)航定位系統(tǒng)?如何實(shí)現(xiàn)室外移動(dòng)機(jī)器人組合導(dǎo)航定位系統(tǒng)的硬件設(shè)計(jì)?如何實(shí)現(xiàn)室外移動(dòng)機(jī)器人組合導(dǎo)航定位系統(tǒng)的軟件設(shè)計(jì)?
2021-04-19 10:50:33
車載定位定向導(dǎo)航系統(tǒng)是由哪些部分組成的?怎樣去設(shè)計(jì)車載定位定向導(dǎo)航系統(tǒng)?
2021-05-13 06:46:43
1、引言近年來,智能交通、無人駕駛、車輛緊急定位報(bào)警等業(yè)務(wù)需求越來越迫切,車載導(dǎo)航定位功能是實(shí)現(xiàn)上述業(yè)務(wù)的基礎(chǔ)。車輛的導(dǎo)航定位通過前裝或后裝車載終端來完成,其性能指標(biāo)直接影響相關(guān)業(yè)務(wù)的用戶體驗(yàn),因此對(duì)車載終端的導(dǎo)航定位性能進(jìn)行測(cè)試評(píng)估是非常必要的。
2019-07-11 06:14:33
、3D打印等領(lǐng)域。機(jī)器人領(lǐng)域——幫助機(jī)器人實(shí)現(xiàn)自主定位導(dǎo)航自主定位導(dǎo)航是機(jī)器人實(shí)現(xiàn)自主行走的必備技術(shù),不管什么類型的機(jī)器人,只要涉及到自主移動(dòng),就需要在其行走的環(huán)境中進(jìn)行導(dǎo)航定位,但傳統(tǒng)的定位導(dǎo)航方法
2018-12-10 14:55:39
利用星敏感器和地平儀測(cè)量“星光仰角”,進(jìn)行自主導(dǎo)航方案設(shè)計(jì)。將UPF(UnscentedParticle Filter)方法引入導(dǎo)航方案,利用UKF(Unscented Kalman Filter)獲得重要性采樣函數(shù)的同時(shí),
2009-06-03 09:12:56 22
22 針對(duì)智能機(jī)器人車的導(dǎo)航、控制問題,本文設(shè)計(jì)搭建了一套基于AT89S52 的機(jī)器人車自主導(dǎo)航控制系統(tǒng)。該系統(tǒng)采用聯(lián)合CCD 和超聲波測(cè)距的兩級(jí)融合方法對(duì)目標(biāo)的運(yùn)動(dòng)姿態(tài)、狀態(tài)信
2009-08-28 10:35:5325 汽車導(dǎo)航系統(tǒng)背景原理分析
從應(yīng)用的角度,汽車GPS導(dǎo)航可分為兩種方式。第一種方式是汽車擁有獨(dú)立的GPS導(dǎo)航裝置,可以進(jìn)行自主導(dǎo)航。例
2010-03-17 13:44:192053 為了加強(qiáng)智能車輛在全未知環(huán)境下的自主導(dǎo)航行駛能力,設(shè)計(jì)了使用步進(jìn)電動(dòng)機(jī)驅(qū)動(dòng)小波束角超聲傳感器旋轉(zhuǎn)探測(cè)的方法,獲取了較以往相比更加全面準(zhǔn)確地環(huán)境信息。在此基礎(chǔ)上,針
2011-06-08 15:21:1051 移動(dòng)導(dǎo)航定位系統(tǒng)是對(duì)移動(dòng)目標(biāo)實(shí)施自動(dòng)動(dòng)態(tài)導(dǎo)航的系統(tǒng)。重點(diǎn)分析了空間矢量數(shù)據(jù)的存儲(chǔ)與管理、空間拓?fù)潢P(guān)系構(gòu)建、空間索引構(gòu)建、定位數(shù)據(jù)接收與處理和地圖匹配等關(guān)鍵技術(shù)。最
2011-06-27 16:11:5721 GPS導(dǎo)航是自主移動(dòng)機(jī)器人室外完成導(dǎo)盲等復(fù)雜任務(wù)的首選導(dǎo)航方式。本系統(tǒng)以Samsang公司的ARM芯片S3C6410為處理器,嵌入Windows CE 6.0操作系統(tǒng),采用Visual Studio 2008開發(fā)上位機(jī)軟件,以讀取串
2011-11-03 11:24:17153 在交通部要求3月份前完成全國(guó)9個(gè)示范省市大型車輛強(qiáng)制安裝北斗導(dǎo)航后,我國(guó)自主研發(fā)北斗導(dǎo)航技術(shù)進(jìn)入一個(gè)新的舞臺(tái)。根據(jù)相關(guān)消息稱,再過不久北斗導(dǎo)航就要進(jìn)入智能手機(jī)領(lǐng)域。
2013-04-08 10:12:392153 移動(dòng)導(dǎo)航定位系統(tǒng)是對(duì)移動(dòng)目 標(biāo)實(shí)施自 動(dòng)動(dòng)態(tài)導(dǎo)航的系統(tǒng)。重點(diǎn)分析了空間矢量數(shù)據(jù)的存儲(chǔ)與管理 、空間 拓?fù)潢P(guān)系構(gòu)建 、空間索引構(gòu)建、定位數(shù)據(jù)接收與處理和地圖匹配等關(guān)鍵技術(shù)。最后 介紹了基于PDA移動(dòng)導(dǎo)航定位系統(tǒng)的實(shí)現(xiàn)及其應(yīng)用。
2016-04-18 10:46:530 基于模糊控制的除草機(jī)器人自主導(dǎo)航_郭偉斌
2017-01-12 22:50:413 LNM-v1.0 激光導(dǎo)航模塊是一款基于室內(nèi)復(fù)雜壞境的導(dǎo)航模塊,該模塊通過激光雷達(dá)對(duì)室內(nèi)環(huán)境進(jìn)行掃描自主構(gòu)建地圖。LNM 模塊只要配合激光雷達(dá)或者二維深度傳感器就可以自主構(gòu)圖并自主規(guī)劃路徑,可在室內(nèi)真正的實(shí)現(xiàn)機(jī)器人的無軌自主導(dǎo)航。
2017-08-28 10:05:3424 自主定位導(dǎo)航是機(jī)器人實(shí)現(xiàn)智能化的前提之一,是賦予機(jī)器人感知和行動(dòng)能力的關(guān)鍵因素。如果說機(jī)器人不會(huì)自主定位導(dǎo)航,不能對(duì)周圍環(huán)境進(jìn)行分析、判斷和選擇,規(guī)劃路徑,那么,這個(gè)機(jī)器人離智能還有一大截的差距
2017-09-19 16:08:3630 LNM-vl.o激光導(dǎo)航模塊是一款基于室內(nèi)復(fù)雜壞境的導(dǎo)航模塊,該模塊通過激光雷達(dá)對(duì)室內(nèi)環(huán)境進(jìn)行掃描自主構(gòu)建地圖。LNM模塊只要配合激光雷達(dá)或者二維深度傳感器就可以自主構(gòu)圖并自主規(guī)劃路徑,可在室內(nèi)真正
2017-11-17 11:37:225 視覺導(dǎo)航作為新興起的技術(shù),受眾多研究者的青睞.設(shè)計(jì)了以現(xiàn)場(chǎng)可編程門列陣(FPGA)為控制核心的自主導(dǎo)航小車,采用一種新穎的自適應(yīng)路徑識(shí)別算法實(shí)現(xiàn)路徑的識(shí)別與提取,并結(jié)合圓弧路線規(guī)劃和控制策略完成小車的自主導(dǎo)航控制.自適應(yīng)路徑識(shí)別算法使導(dǎo)航小車可以適應(yīng)多種光照和路面條件.
2017-11-18 12:29:353888 
針對(duì)未知環(huán)境中移動(dòng)機(jī)器人的導(dǎo)航問題,基于生物學(xué)的認(rèn)知和發(fā)育機(jī)理構(gòu)建自主導(dǎo)航的認(rèn)知發(fā)育模型。通過自主插入神經(jīng)元節(jié)點(diǎn),設(shè)計(jì)結(jié)構(gòu)可動(dòng)態(tài)發(fā)育的神經(jīng)網(wǎng)絡(luò),模擬生物的發(fā)育特性達(dá)到與應(yīng)用需求相匹配的網(wǎng)絡(luò)規(guī)模。通過
2018-01-17 11:09:412 從協(xié)同化、體系化、一體化適應(yīng)未來戰(zhàn)爭(zhēng)的信息化,跨域化、高速化、多用化適應(yīng)未來戰(zhàn)爭(zhēng)的立體多維化,自主化、平臺(tái)化、小型化適應(yīng)未來戰(zhàn)爭(zhēng)的無人智能化3個(gè)方面概述了未來戰(zhàn)略新常態(tài)下武器裝備對(duì)自主導(dǎo)航控制的需求
2018-01-23 17:22:250 的發(fā)展成熟,全球定位系統(tǒng)-GPS系統(tǒng)的廣泛應(yīng)用,其具有實(shí)時(shí)定位快,精度高、實(shí)時(shí)效果佳、使用方便等優(yōu)點(diǎn)。自主導(dǎo)航作為無人機(jī)的重要需求功能之一,得到了充分的重視和快速發(fā)展,逐漸發(fā)展出了一個(gè)嶄新的獨(dú)立模塊一一航跡系統(tǒng)。本文介紹了一種小型無人機(jī)自主導(dǎo)航
2018-02-24 15:12:030 報(bào)道稱,該技術(shù)可使移動(dòng)機(jī)器人平臺(tái)在作戰(zhàn)環(huán)境中自主導(dǎo)航,同時(shí)在特定情況下讓機(jī)器人完成人類期望其執(zhí)行的動(dòng)作。
2018-07-26 14:55:00923 很多人在看到機(jī)器人的時(shí)候,一是出于好奇,二是內(nèi)心的“小惡魔”,總想逗一逗他,看看是不是真的智能,于是便會(huì)故意擋在他前面,不讓他走。這時(shí)候,我們不僅需要激光雷達(dá),還需要多傳感器數(shù)據(jù)的融合,實(shí)現(xiàn)有效避障和自主導(dǎo)航。
2018-07-27 15:47:044212 
機(jī)器人自主定位導(dǎo)航看是簡(jiǎn)單實(shí)則需根據(jù)地圖數(shù)據(jù)+算法的結(jié)合實(shí)現(xiàn)真正的自動(dòng)化自動(dòng)導(dǎo)航;機(jī)器人導(dǎo)航可以分為三個(gè)部分,包括定位、建圖以及運(yùn)動(dòng)控制。而自主導(dǎo)航需要解決的是智能移動(dòng)機(jī)器人與環(huán)境進(jìn)行自主交互
2018-09-23 07:07:003029 隨著第三代AGV導(dǎo)航技術(shù)的興起,激光雷達(dá)傳感器成為了新一代移動(dòng)機(jī)器人的利器。不過,由于激光雷達(dá)價(jià)格十分昂貴,讓許多AGV廠商望而生畏。目前市場(chǎng)上仍然以低成本的磁條導(dǎo)航為主,不過自然導(dǎo)航是趨勢(shì),通過激光雷達(dá)能夠構(gòu)建即時(shí)地圖,不再受環(huán)境的限制,機(jī)器人實(shí)現(xiàn)自主導(dǎo)航。
2019-04-28 16:49:082981 美國(guó)科研人員24日在美國(guó)《科學(xué)·機(jī)器人學(xué)》雜志上發(fā)表報(bào)告說,他們研發(fā)出一種可以在跳動(dòng)心臟周圍自主導(dǎo)航的微型醫(yī)療機(jī)器人,從而能幫助外科醫(yī)生完成復(fù)雜的心臟手術(shù)。 研究顯示,在一個(gè)對(duì)動(dòng)物實(shí)施的心臟瓣膜修復(fù)
2019-05-14 15:02:442478 目前無人機(jī)自主導(dǎo)航方法大多采用慣性導(dǎo)航與全球定位系統(tǒng)相結(jié)合的方式,而采用北斗衛(wèi)星導(dǎo)航系統(tǒng)的自主導(dǎo)航方法較少。本文主要針對(duì)當(dāng)前我國(guó)農(nóng)用無人機(jī)自主導(dǎo)航方法的應(yīng)用需求,采用北斗衛(wèi)星導(dǎo)航與慣性導(dǎo)航相結(jié)合
2019-05-13 08:00:0012 Omron Adept Technologies最近獲得了三項(xiàng)移動(dòng)機(jī)器人專利。每項(xiàng)專利都涉及不同的移動(dòng)機(jī)器人解決方案,包括:運(yùn)輸車、作業(yè)管理系統(tǒng)(Enterprise Manager)和用于作業(yè)管理的自主導(dǎo)航車。
2019-05-25 09:43:073016 近日,佛羅里達(dá)人類與機(jī)器認(rèn)知研究所 (IHMC)發(fā)布最新雙足機(jī)器人視頻(這次是真的,不是CG),展示了實(shí)驗(yàn)體波士頓動(dòng)力機(jī)器人Atlas可自主導(dǎo)航,通過不同地形路面,完全實(shí)現(xiàn)機(jī)器人自主行走!
2019-07-09 14:22:072730 系列激光雷達(dá)與模塊化定位導(dǎo)航系統(tǒng)SLAMWARE。激光雷達(dá)是實(shí)現(xiàn)機(jī)器人自主行走最核心的傳感器,它相當(dāng)于機(jī)器人的“眼睛”,可以讓機(jī)器人“看清”周圍環(huán)境,目前,基于三角測(cè)距原理,思嵐科技已研發(fā)出三代激光
2019-08-23 14:49:212423 相較于傳統(tǒng)的磁條導(dǎo)航、二維碼導(dǎo)航移動(dòng)機(jī)器人,激光導(dǎo)航移動(dòng)機(jī)器人以其自主靈活的優(yōu)勢(shì)越來越受到用戶的青睞。
2020-03-21 09:55:112535 SLAM技術(shù)作為機(jī)器人自主移動(dòng)的關(guān)鍵技術(shù),讓很多人都誤解為:SLAM=機(jī)器人自主定位導(dǎo)航。
2020-03-30 10:39:112647 如今,機(jī)器人已被廣泛應(yīng)用于餐廳、酒店、銀行等各大服務(wù)場(chǎng)所,在人員復(fù)雜的場(chǎng)景中,對(duì)于機(jī)器人如何自由穿梭于人群是個(gè)很大的挑戰(zhàn),這需要涉及到機(jī)器人的自主定位導(dǎo)航技術(shù),自主定位導(dǎo)航技術(shù)是機(jī)器人實(shí)現(xiàn)自主行走
2020-06-01 17:30:495014 環(huán)境信息,利用人工智能識(shí)別、理解、推理并進(jìn)行判斷和決策來完成一定的任務(wù)。因此智能機(jī)器人除了具有環(huán)境感知能力外,還具有較強(qiáng)的識(shí)別理解能力和決策規(guī)劃能力。 定位是機(jī)器人實(shí)現(xiàn)自主導(dǎo)航的基本環(huán)節(jié) 目前,自主移動(dòng)機(jī)器人
2021-10-14 14:30:551562 逐行掃描的方法得到了導(dǎo)航離散點(diǎn)。路徑規(guī)劃和跟蹤使用RBF神經(jīng)網(wǎng)絡(luò)逼近算法,通過逼近誤差和權(quán)值控制路徑跟蹤的精度,系統(tǒng)響應(yīng)的執(zhí)行端使用液壓伺服系統(tǒng),提高了機(jī)器人自主導(dǎo)航的精度。以黃瓜采摘作為研究對(duì)象,在日光溫室對(duì)機(jī)器人采
2020-08-27 14:30:0019 據(jù)外媒報(bào)道,近日,美國(guó)專利商標(biāo)局公布了蘋果公司的一項(xiàng)專利申請(qǐng),該項(xiàng)專利與汽車的自主導(dǎo)航系統(tǒng)有關(guān),其中包括基于車輛預(yù)測(cè)性軌跡信息的各種動(dòng)態(tài)元素以及采用新型“意圖識(shí)別”模塊識(shí)別情境線索的真實(shí)世界動(dòng)態(tài)元素。
2020-11-09 10:56:181455 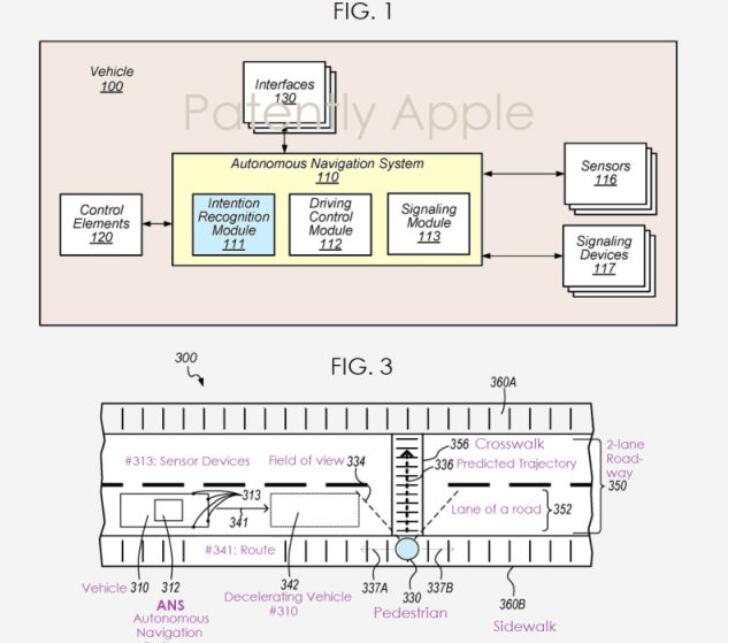
蘋果的造車計(jì)劃中又新添一項(xiàng)專利。據(jù)外媒報(bào)道,近日,美國(guó)專利商標(biāo)局公布了蘋果公司申請(qǐng)的一項(xiàng)與汽車的自主導(dǎo)航系統(tǒng)(ANS)有關(guān)的專利,其可以對(duì)車道、道路標(biāo)志、其他車輛的位置、行人的當(dāng)前位置等進(jìn)行處理,從而實(shí)現(xiàn)自主駕駛。
2020-11-10 14:23:261668 蘋果對(duì)汽車領(lǐng)域正展現(xiàn)出越來越濃厚的興趣。近日,蘋果公布了一個(gè)關(guān)于汽車自主導(dǎo)航系統(tǒng)的專利,通過這個(gè)系統(tǒng),汽車就可以實(shí)現(xiàn)自主導(dǎo)航。 在某些情景下,這個(gè)自主導(dǎo)航系統(tǒng)可以收集外部的靜態(tài)環(huán)境和動(dòng)態(tài)環(huán)境,從而
2020-11-16 17:04:562110 無人機(jī)、無人車、無人船、機(jī)器人等代表性無人系統(tǒng)的智能自主控制是當(dāng)前自動(dòng)控制領(lǐng)域的研究熱點(diǎn),更是提升無人系統(tǒng)自主性和智能化水平的核心技術(shù)。自主導(dǎo)航技術(shù)利用對(duì)應(yīng)的自主導(dǎo)航系統(tǒng)獲取無人系統(tǒng)自身的位置、速度
2020-11-19 16:38:453826 ? ? 近期,科聰最新MRC3000控制器震撼上市,基于MRC3000為核心的移動(dòng)機(jī)器人自主導(dǎo)航控制系統(tǒng)現(xiàn)可試用。 解決方案以MRC3000控制器為核心,適用于倉儲(chǔ)物流、航天軍工、智慧城市、智能制造
2020-12-25 09:57:385558 (人工智能安全實(shí)驗(yàn)室) 趙鼎教授團(tuán)隊(duì)分享了其在自主導(dǎo)航機(jī)器人領(lǐng)域的最新研究方向,該項(xiàng)目以開源自主連接和自動(dòng)化研究車輛平臺(tái)(OpenCAV Platform)為基礎(chǔ),通過搭建包括雷達(dá)、激光雷達(dá)、攝像機(jī)等一系列傳感器,實(shí)現(xiàn)了機(jī)器人室內(nèi)外導(dǎo)航、避障等功能。 卡耐基梅隆大學(xué) Safe AI 實(shí)驗(yàn)室
2021-03-12 11:09:592012 為了與傳統(tǒng)導(dǎo)引方式區(qū)分,擁有slam自主導(dǎo)航技術(shù)的移動(dòng)機(jī)器人,目前統(tǒng)稱為AMR。在許多工業(yè)場(chǎng)景中,兼具柔性化與智能化的AMR被認(rèn)為是移動(dòng)機(jī)器人迭代的必然趨勢(shì)。盡管AMR產(chǎn)品在應(yīng)用層面已經(jīng)逐步成熟,不同slam自主導(dǎo)航技術(shù)現(xiàn)階段還是存在一定局限。
2021-03-22 16:21:311455 電子發(fā)燒友網(wǎng)為你提供STM32的磁導(dǎo)航自主導(dǎo)引車通用驅(qū)動(dòng)器設(shè)計(jì)資料下載的電子資料下載,更有其他相關(guān)的電路圖、源代碼、課件教程、中文資料、英文資料、參考設(shè)計(jì)、用戶指南、解決方案等資料,希望可以幫助到廣大的電子工程師們。
2021-04-21 08:40:0617 同時(shí)定位與地圖構(gòu)建( Simultaneous lolaliκ ation And Mapping,SLAM)是未知環(huán)境下實(shí)現(xiàn)機(jī)器人自主導(dǎo)航的主要方法, Fastslam是一個(gè)著名的SLAM問題解決
2021-05-07 15:13:298 。 此次,思嵐科技把機(jī)器人通用底盤Apollo、巡檢盤點(diǎn)機(jī)器人Diana搬進(jìn)了展臺(tái),展現(xiàn)了思嵐科技在機(jī)器人自主定位導(dǎo)航以及商用零售領(lǐng)域的布局。其中,Diana應(yīng)用了Apollo底盤,云端結(jié)合的結(jié)構(gòu)設(shè)計(jì),具備以下功能: 1·自主移動(dòng)能力– 劃定范圍內(nèi)
2021-05-23 18:00:312108 好長(zhǎng)時(shí)間沒寫博客了,今天繼續(xù)工作的第一件事情是做一款STM32 的ROS智能移動(dòng)機(jī)器人,構(gòu)建地圖以及自主導(dǎo)航。在這里筆者認(rèn)為最難的事情是搞機(jī)器人底盤,由于之前沒有接觸過32板,查了一周的文檔才清楚
2021-12-07 14:51:0818 電子發(fā)燒友網(wǎng)報(bào)道(文/李誠(chéng))慣性導(dǎo)航系統(tǒng)是一種不受電磁波干擾,且不依靠外界信號(hào)即可完成自主定位的導(dǎo)航系統(tǒng)。
2022-01-19 15:46:232581 預(yù)測(cè)表明,自主導(dǎo)航設(shè)備市場(chǎng)將迎來更廣闊的發(fā)展前景。其中,英國(guó)政府的研究預(yù)測(cè),到2035年,全球L3-L5級(jí)別的自動(dòng)駕駛車輛的全球市場(chǎng)估值將達(dá)到8900億美元,為此類車輛提供支持的互聯(lián)和自動(dòng)駕駛技術(shù)的市場(chǎng)估值為1370億美元。
2022-04-02 14:29:411213 隨著新興行業(yè)發(fā)展,越來越多的移動(dòng)機(jī)器人投入使用,它們須在新的動(dòng)態(tài)環(huán)境中實(shí)現(xiàn)可靠的自主導(dǎo)航。移動(dòng)機(jī)器人或自動(dòng)引導(dǎo)車輛(AGV)導(dǎo)航功能的實(shí)現(xiàn),都離不開 LiDAR 激光傳感器。LiDAR ,是一種光學(xué)
2022-05-20 13:06:042466 據(jù)兩位業(yè)內(nèi)人士透露的消息和政府文件稱,印度正在推動(dòng)科技巨頭在幾個(gè)月內(nèi)使其智能手機(jī)與該國(guó)的自主導(dǎo)航系統(tǒng)兼容,這令三星、小米和蘋果等公司感到擔(dān)憂,理由是擔(dān)心兼容NavIC會(huì)推高研發(fā)和生產(chǎn)成本。
2022-09-27 10:05:28690 電子發(fā)燒友網(wǎng)站提供《自主導(dǎo)航和繪制二維地圖的機(jī)器人.zip》資料免費(fèi)下載
2022-10-18 17:10:200 我們先來理清自主導(dǎo)航的框架,其關(guān)鍵是自主定位和路徑規(guī)劃。針對(duì)這兩個(gè)核心功能,ROS提供了一套完整的框架支持,收到導(dǎo)航目標(biāo)位置后,機(jī)器人只需要發(fā)布必要的傳感器信息,框架中的功能包即可幫助機(jī)器人完成導(dǎo)航。
2023-02-06 11:52:45515 ,在人類社會(huì)中發(fā)揮著越來越重要的作用。但移動(dòng)機(jī)器人擁有自主導(dǎo)航能力,才能進(jìn)一步完成上訴所設(shè)定的任務(wù)。可以說自主導(dǎo)航能力是移動(dòng)機(jī)器人最為基礎(chǔ)和核心的技術(shù),而上位機(jī)軟件的實(shí)現(xiàn)與設(shè)計(jì),則進(jìn)一步推動(dòng)機(jī)器人的完善發(fā)展。在
2023-06-09 13:12:04544 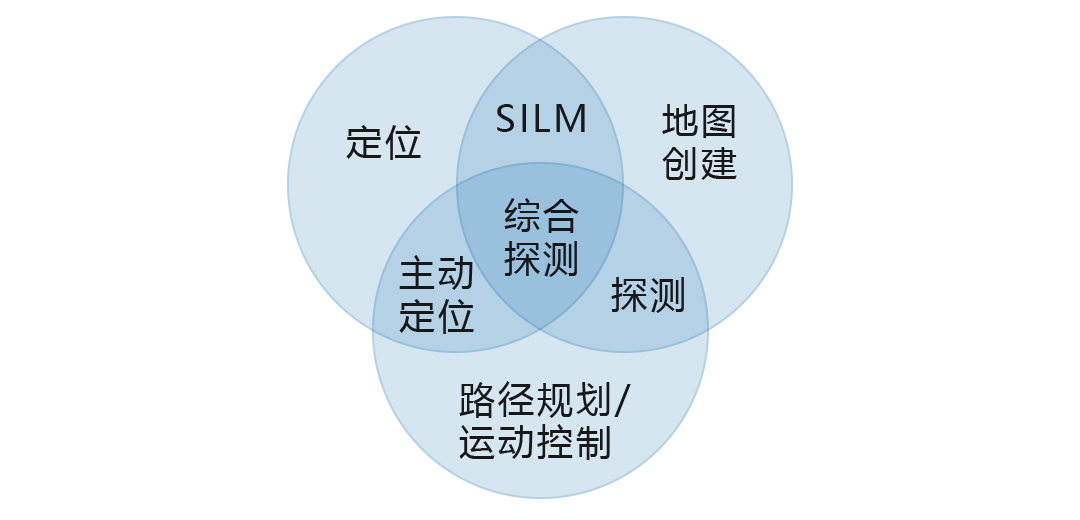
,在人類社會(huì)中發(fā)揮著越來越重要的作用。但移動(dòng)機(jī)器人擁有自主導(dǎo)航能力,才能進(jìn)一步完成上訴所設(shè)定的任務(wù)。可以說自主導(dǎo)航能力是移動(dòng)機(jī)器人最為基礎(chǔ)和核心的技術(shù),而上位機(jī)軟件的實(shí)
2023-05-29 17:06:45608 
電子發(fā)燒友網(wǎng)站提供《自主導(dǎo)航機(jī)器人的創(chuàng)建.zip》資料免費(fèi)下載
2023-06-27 11:16:460 正如圖中所示,機(jī)器人自主定位導(dǎo)航技術(shù)中包括:定位和地圖創(chuàng)建(SLAM)與路徑規(guī)劃和運(yùn)動(dòng)控制兩個(gè)部分,而SLAM本身只是完成機(jī)器人的定位和地圖創(chuàng)建,二者有所區(qū)別。
2023-08-03 11:12:00699 
上篇,小嵐為大家介紹了slamware自主定位導(dǎo)航解決方案在移動(dòng)生態(tài)、開發(fā)便利性、智能性上探索的成果,那背后到底是哪些關(guān)鍵技術(shù)在賦能呢? 機(jī)器人在未知場(chǎng)景中,要想實(shí)現(xiàn)類人般的智能移動(dòng),必須要具備地圖
2023-10-11 16:07:00585 
? 前言 Athena 2.0是思嵐研發(fā)的搭載全新的SLAM自主定位導(dǎo)航系統(tǒng)及激光視覺多重導(dǎo)航方案,能夠自主上下電梯,實(shí)現(xiàn)多樓層之間自主移動(dòng)的智能機(jī)器人底盤。 Athena2.0智能機(jī)器人底盤
2023-10-13 09:21:32720 電子發(fā)燒友網(wǎng)站提供《基于GPS的自主移動(dòng)機(jī)器人導(dǎo)航定位系統(tǒng)的實(shí)現(xiàn).pdf》資料免費(fèi)下載
2023-10-25 11:23:400 衛(wèi)星導(dǎo)航或衛(wèi)星導(dǎo)航系統(tǒng)是使用衛(wèi)星提供自主地理定位的系統(tǒng)。覆蓋全球的衛(wèi)星導(dǎo)航系統(tǒng)稱為全球導(dǎo)航衛(wèi)星系統(tǒng)(Global Navigation Satellite System)。
2023-12-04 10:24:29414 
 電子發(fā)燒友App
電子發(fā)燒友App











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論