 電子發(fā)燒友App
電子發(fā)燒友App


1. 簡介
一般來說,已經(jīng)提出了一些提高交通場景中雷達(dá)性能的方法,主要可分為兩類:(1)圍繞信號處理方向,盡可能減少或消除干擾信號,以保證目標(biāo)信號的純度。(2)設(shè)計更好的探測器。
在干擾信號抑制領(lǐng)域,將干擾污染的樣本從信號中剔除是最直接的干擾抑制方法。盡管如此,它也會抑制目標(biāo)的部分有效信號,導(dǎo)致有用信號的切口樣本重建精度降低。為了緩解這種影響,該文提出一種基于迭代矩陣-鉛筆(MP)方法的干擾抑制外推法。但重建信號的精度會隨著污染樣品比例的增加而降低。為了提高信號重構(gòu)精度,該文提出一種基于漢克爾矩陣稀疏低秩分解的方法但是,迭代和最佳質(zhì)量選擇增加了算法的復(fù)雜性。為了處理雷達(dá)間干擾,提出了一些新方法,例如設(shè)計一種新的正交噪聲波形或在可調(diào)Q因子小波變換(TQWT)域中提出干擾抑制技術(shù)。此外,一些研究人員已經(jīng)開始從距離和多普勒細(xì)胞遷移校準(zhǔn)開始,以減少信號失真。
設(shè)計更好的探測器是提高雷達(dá)應(yīng)用能力的另一個方向。與信號干擾抑制相比,雖然雷達(dá)探測性能的提升較弱,但探測器的設(shè)計更為直接。特別是,在大多數(shù)情況下,它不會增加額外的鏈接和計算復(fù)雜性,這更適合具有低性能處理器的低成本雷達(dá)系統(tǒng)。所以是從探測器設(shè)計的角度來看。在雷達(dá)的實(shí)際應(yīng)用中,目標(biāo)總是出現(xiàn)在復(fù)雜多變的噪聲背景之前,受時間和位置變化的影響,因此固定閾值檢測方法無法有效地將目標(biāo)與背景噪聲區(qū)分開來。雷達(dá)常數(shù)誤報率(CFAR)檢測,通過評估當(dāng)前雜波環(huán)境自適應(yīng)設(shè)置檢測閾值,是分離目標(biāo)和背景的關(guān)鍵技術(shù)。因此,適當(dāng)?shù)腃FAR檢測算法可以提高雷達(dá)探測性能,為雷達(dá)數(shù)據(jù)處理提供準(zhǔn)確的目標(biāo)信息。它也成為雷達(dá)探測的一個關(guān)鍵研究方面。
最早提出的CFAR檢測算法是細(xì)胞平均CFAR(CA-CFAR)。這是基于平均局部噪聲功率水平來檢測目標(biāo)。設(shè)計一個參考窗口,以窗口的中心單元為候選目標(biāo),用窗口中其他單元的幅值累積值作為背景噪聲功率的估計值。目標(biāo)是否存在是通過判斷候選目標(biāo)的功率值和估計的噪聲功率值來確定的。CA-CFAR在非均勻噪聲和多目標(biāo)環(huán)境下的檢測性能較差,因?yàn)閰⒖即翱趦?nèi)的干擾信號或其他目標(biāo)會導(dǎo)致背景噪聲估計誤差。針對多目標(biāo)或非均勻噪聲下CA-CFAR檢測性能下降的問題,最大選擇檢測(GO-CFAR)和最小選擇檢測 (SO-CFAR)被提議。GO-CFAR在雜亂邊緣環(huán)境下可以保持良好的虛警控制性能,但在多目標(biāo)環(huán)境下會出現(xiàn)“目標(biāo)屏蔽”。
SO-CFAR具有良好的多目標(biāo)分辨能力,但其虛警控制能力較弱。有序統(tǒng)計 CFAR (OS-CFAR)是數(shù)字圖像處理中另一種典型的CFAR檢測方法,源自中值濾波器概念。它根據(jù)功率值排列參考窗口中的采樣單元,并選擇其中一個樣本功率值作為決策閾值。與CA-CFAR的檢測性能相比,OS-CFAR對多目標(biāo)檢測具有較強(qiáng)的魯棒性,但產(chǎn)生的CFAR損失較高。提出了一些結(jié)合OS和CA的新方法。采用修整均值檢測器 (TM-CFAR)以算法為例。參考窗口中的采樣點(diǎn)按振幅值排序,如 OS-CFAR。然后去除具有最大和最小振幅的部分采樣點(diǎn)。最后,將剩余的采樣點(diǎn)平均為背景噪聲的估計值。
現(xiàn)在,針對不同的應(yīng)用需求,已經(jīng)提出了基于傳統(tǒng)方法的CFAR檢測算法。一些學(xué)者致力于研究探測器的多目標(biāo)探測能力。例如,提出OSCA-CFAR算法,將CA-CFAR算法和OS-CFAR算法相結(jié)合,提高毫米波雷達(dá)的多目標(biāo)探測能力,給出理想噪聲環(huán)境下的算法性能仿真。一些研究人員專注于提高探測器在復(fù)雜集群環(huán)境中的檢測性能。根據(jù)中心極限定理和信號對數(shù)壓縮原理,提出了一種Comp-CFAR方法,用于具有長拖尾效應(yīng)特性的雜波中目標(biāo)檢測。基于zlog(z)的CFAR檢測器降低威布爾雜波誤報率。其他一些學(xué)者提出了一種結(jié)合機(jī)器學(xué)習(xí)的新方法。在包含 CFAR 滑動窗口輸入和輸出的數(shù)據(jù)集上訓(xùn)練前饋人工神經(jīng)網(wǎng)絡(luò) (ANN),以提高 CFAR 檢測的效率。但是,這種方式增加了算法的復(fù)雜性。
表 1 簡要總結(jié)了上述 CFAR 檢測算法。目前所有CFAR算法都通過設(shè)計參考窗口并處理窗口中的數(shù)據(jù)來實(shí)現(xiàn)目標(biāo)檢測。參考窗的設(shè)計可以有效降低雜波干擾水平,但有兩個缺點(diǎn)。一是滑動窗口會降低檢測物體的效率。特別是在線性調(diào)頻連續(xù)波(LFMCW)雷達(dá)系統(tǒng)中,CFAR探測器的輸入是二維距離多普勒矩陣(RDM)。雖然CFAR算法的原理沒有改變,但參考窗口的滑動已經(jīng)從一維滑動搜索轉(zhuǎn)變?yōu)槎S滑動搜索,大大降低了雷達(dá)目標(biāo)探測的實(shí)時性。另一個缺點(diǎn)是窗口限制了背景噪聲估計的采樣點(diǎn)。理論上,使用的采樣點(diǎn)越多,估計的噪聲功率值越準(zhǔn)確,CFAR檢測精度越高。參考窗口的設(shè)計和滑動限制了雷達(dá)目標(biāo)檢測的效率。
表 1. 簡要總結(jié)了 CFAR 算法的特征。

幸運(yùn)的是,與海面等復(fù)雜的背景環(huán)境相比,交通道路上的背景噪音相對簡單。特別是當(dāng)雷達(dá)監(jiān)測運(yùn)動目標(biāo)時,使用去零多普勒方法可以消除背景噪聲數(shù)據(jù)對檢測的影響。結(jié)合非理想目標(biāo)運(yùn)動(車輛轉(zhuǎn)彎、制動和變道)、目標(biāo)反射區(qū)域的不規(guī)則性以及幀數(shù)據(jù)的獨(dú)立性,認(rèn)為交通道路上的運(yùn)動目標(biāo)回波服從理想的Swerling II模型。基于上述分析,對于背景噪聲相對干凈的道路交通監(jiān)控應(yīng)用,可能不需要為復(fù)雜噪聲和干擾降低而設(shè)計的參考窗口。相反,滑動窗口增加了算法的時間復(fù)雜度并降低了雷達(dá)監(jiān)控的效率。為滿足交通監(jiān)測雷達(dá)系統(tǒng)低處理時延的要求,提出一種基于蒙特卡羅的CFAR算法,以提高交通環(huán)境下雷達(dá)探測效率和對運(yùn)動目標(biāo)的靈敏度。與傳統(tǒng)算法相比,該算法具有更高的檢測靈敏度,更重要的是不需要參考窗口的設(shè)計和滑動,大大降低了算法的時間復(fù)雜度,提高了檢測速度和效率。
貢獻(xiàn)總結(jié)如下:首先,在所提出的CFAR檢測算法中,對整個RDM矩陣區(qū)域進(jìn)行隨機(jī)采樣,得到當(dāng)前時刻背景噪聲功率估計的采樣點(diǎn);該原理是將蒙特卡羅模擬原理(通過獨(dú)立重復(fù)實(shí)驗(yàn)獲得未知量的性質(zhì))轉(zhuǎn)換為RDM矩陣域的隨機(jī)抽樣。這種方式突破了參考窗口的限制,可以增加大量的采樣點(diǎn)進(jìn)行背景噪聲估計。其次,干擾點(diǎn)濾波方法提高了背景噪聲估計的精度。根據(jù)采樣點(diǎn)的振幅值對采樣點(diǎn)進(jìn)行排序和過濾,以去除可能的目標(biāo)點(diǎn)或干擾點(diǎn)。然后,通過均值法得到背景噪聲估計的功率值。最后,通過背景噪聲估計提取RDM矩陣中的目標(biāo)點(diǎn)。此外,給出了算法的參數(shù)設(shè)置方法,例如,根據(jù)當(dāng)前的物理平臺和應(yīng)用環(huán)境,通過反復(fù)統(tǒng)計得到算法參數(shù)值。配置參數(shù)過程只需在雷達(dá)系統(tǒng)環(huán)境不變時執(zhí)行一次。仿真和實(shí)際實(shí)驗(yàn)表明,與傳統(tǒng)方法相比,該方法具有更高的檢測靈敏度、更高的檢測精度和更低的檢測延遲,提高了交通監(jiān)控中的雷達(dá)探測效率。
2. 交通場景
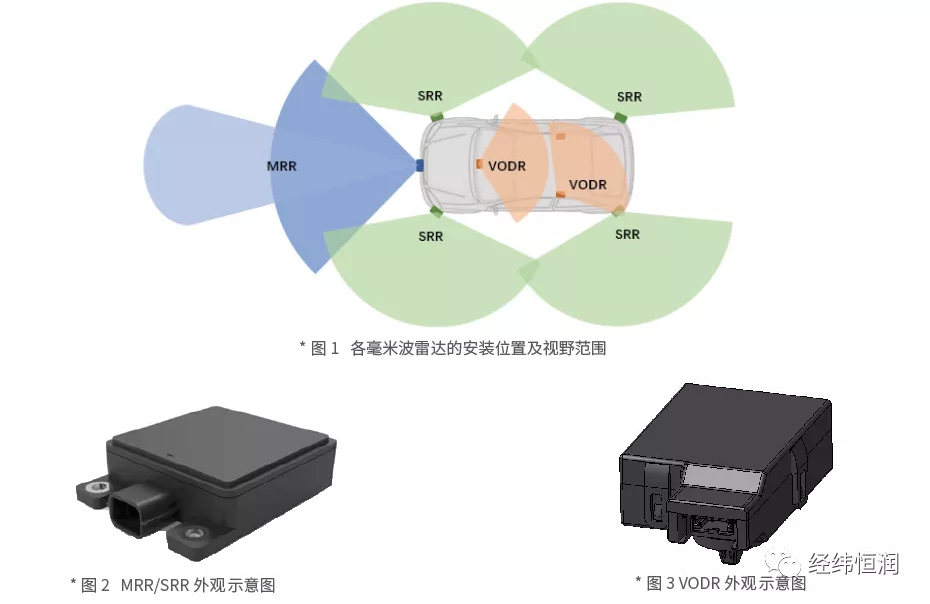
通常,交通傳感器安裝在道路兩側(cè)或延伸到道路中心的固定支架上(如圖1所示),并且要求它們具有以下基本功能:

圖1. 交通道路場景。
- 檢測靈敏度高。視野中的所有目標(biāo)都可以完全檢測到,包括目標(biāo)的部分遮擋;
- 低信息延遲能力。它可以實(shí)時反映路況,即要求數(shù)據(jù)采集與路況輸出之間的延遲盡可能短(理想情況下,延遲不應(yīng)超過100毫秒);
- 耐候性。傳感器應(yīng)盡量減少夜間、霧和其他天氣造成的影響。
毫米波雷達(dá)被認(rèn)為具有用于城市交通監(jiān)測的潛力,因?yàn)椴皇墉h(huán)境影響,具有高范圍分辨率和低應(yīng)用成本。CFAR探測器作為雷達(dá)目標(biāo)提取的重要組成部分,已經(jīng)得到了廣泛的研究。通過研究傳統(tǒng)的CFAR算法,分析交通環(huán)境的特點(diǎn),給出了一種新的CFAR檢測算法,以提高雷達(dá)對目標(biāo)檢測的靈敏度、多目標(biāo)檢測能力,降低時延,希望為增強(qiáng)雷達(dá)在城市交通監(jiān)測中的適應(yīng)性提供獨(dú)特的參考。
3. 交通場景雷達(dá)背景噪聲分析
基于雷達(dá)芯片(CAL77S244)的射頻前端具有三個發(fā)射天線和四個接收天線,用于發(fā)射毫米波和接收目標(biāo)回波信號。此外,四通道高速ADC用于數(shù)據(jù)采集。最后,在基于FPGA和ARM架構(gòu)的后端基帶處理系統(tǒng)上實(shí)現(xiàn)數(shù)字處理算法和目標(biāo)信息的提取。數(shù)據(jù)采集場景和雷達(dá)系統(tǒng)如圖2所示。

圖2. ( a ) 雷達(dá)系統(tǒng)。( b ) 數(shù)據(jù)收集方案。
圖3顯示了背景噪聲數(shù)據(jù)收集和顯示。圖3a是持續(xù)誤報檢測數(shù)據(jù)采集的流程圖。在該雷達(dá)系統(tǒng)中,四個接收通道接收背景環(huán)境中雷達(dá)的電磁回波,并通過非相干累積獲得RDM矩陣。圖3b顯示了在沒有移動目標(biāo)的條件下RDM的功率幅度分布。功率幅值在零多普勒區(qū)域(靜止物體區(qū)域)中突然且不均勻,這是由不同距離的物體數(shù)量和物體反射區(qū)域的大小等因素共同造成的。初步觀察表明,噪聲功率均勻分布在非零多普勒域(運(yùn)動目標(biāo)區(qū)域),無明顯突變。此外,靜止物體的功率不會顯著擴(kuò)展到移動目標(biāo)所在的區(qū)域。

圖3. ( a ) RDM數(shù)據(jù)采集過程。( b ) 數(shù)據(jù)收集方案。
采用距離維數(shù)和速度維數(shù)數(shù)據(jù)方差作為測量數(shù)據(jù)離散度的有效方法,評估RDM矩陣中移動目標(biāo)區(qū)域噪聲功率幅值的分布。它計算了 RDM 中數(shù)據(jù)集的每一行(速度維度)或列(距離維度)的方差,如圖 4 所示(多個統(tǒng)計量的平均值)。值得注意的是,在計算方差之前,以行人的平均速度為參考(0.5 m/s),消除了RDM矩陣中靜態(tài)物體所在的像元,例如速度低于0.5 m/s的像元。速度維數(shù)方差和距離維數(shù)方差均小于0.018,可以認(rèn)為背景噪聲功率幅值在非零多普勒域中相對均勻。

圖4. RDM 矩陣中的背景噪聲幅度色散 ( a ) 范圍方向上的噪聲幅度方差。( b ) 多普勒方向的噪聲幅度變化。
功率密度分布是背景噪聲的另一個特征。以前,假設(shè)雷達(dá)噪聲分布滿足瑞利分布:

RDM中的非零多普勒細(xì)胞通過MATLAB分布擬合工具箱進(jìn)行采樣處理,然后數(shù)據(jù)分布(紫色)和瑞利分布(紅色)的擬合曲線如圖5a所示。圖5b顯示了數(shù)據(jù)概率分布與瑞利分布之間的匹配度,即數(shù)據(jù)越接近曲線,它與瑞利分布的一致性越大。

圖5. RDM矩陣噪聲密度函數(shù)仿真擬合實(shí)驗(yàn)實(shí)例 ( a )噪聲分布曲線。( b ) 瑞利分布的匹配度。

















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論