 電子發燒友App
電子發燒友App


無論是軟件定義汽車,還是分布式ECU抑或是自適應Autosar,都離不開智能汽車時代的基礎技術車載以太網,對于硬件工程師來說,車載以太網物理層和交換機是其最關注的芯片,這也是利潤率遠超過高算力芯片的領域,也是基本上被歐美企業壟斷的領域。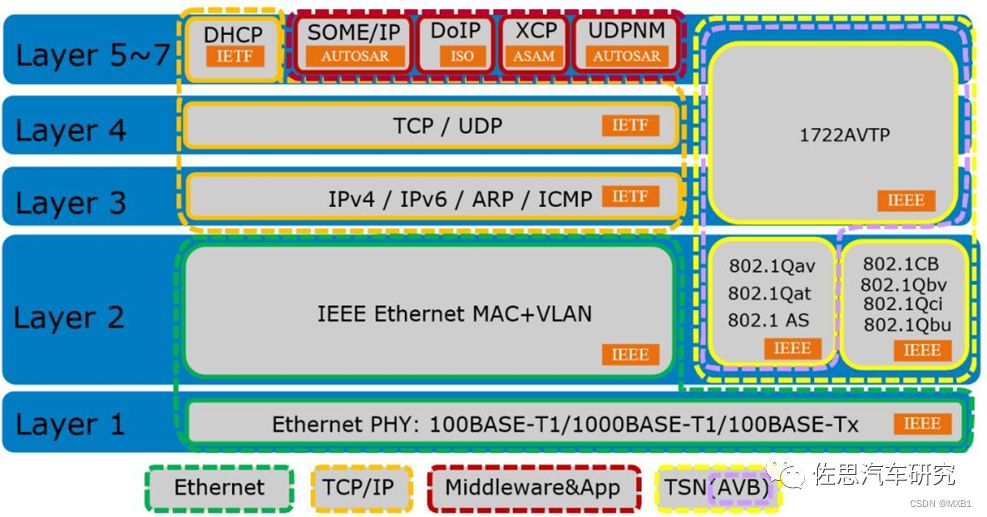
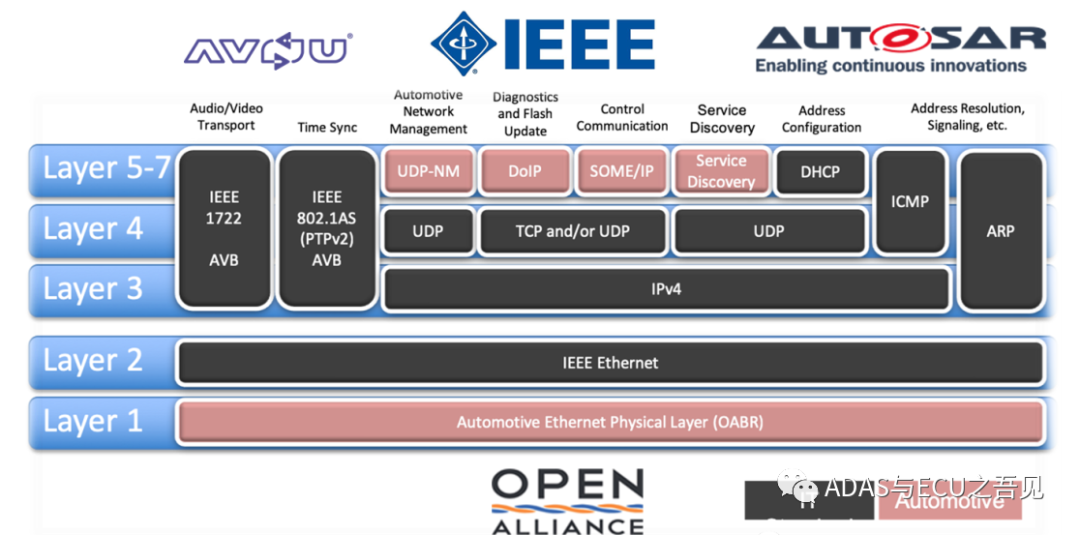
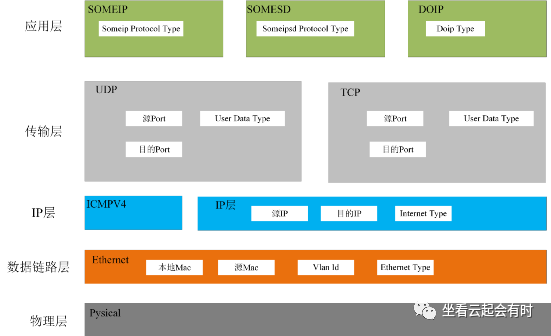
上圖是整個車載以太網的7層OSI模型與標準分布圖,我們最常提到的是TSN或EAVB,而物理層標準鮮少有人提及。因為絕大多數工程師都不會和物理層打交道。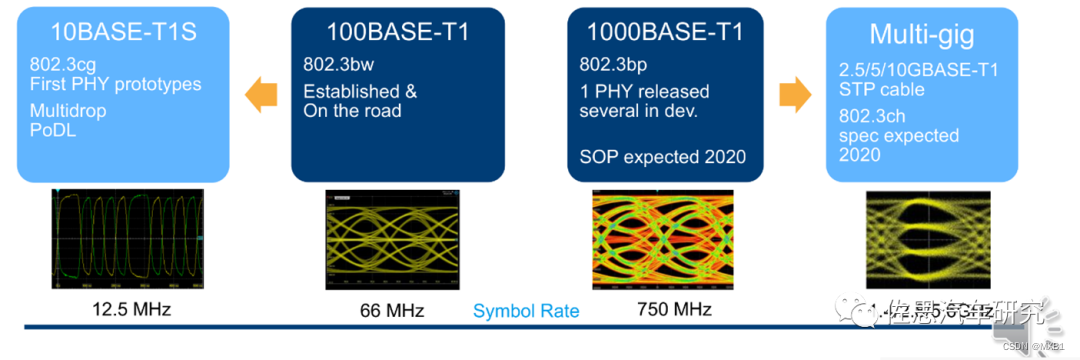
很多人都在說域控制器、服務導向架構、分布式計算或軟件定義汽車,殊不知關鍵的1G車載以太網物理層芯片在2020年才SOP,而多G帶寬的車載以太網物理層標準才剛剛在去年完成,SOP還得一年或兩三年左右。沒有這個芯片,什么域控制器、服務導向架構、分布式計算或軟件定義汽車都是空中樓閣。
全面使用域控制器、服務導向架構、分布式計算或軟件定義汽車都需要以太網做骨干網,也就是多G以太網,而第一個支持多G車載以太網物理層的芯片在2020年11月才正式推出,量產估計要到2021年底或2022年初,也有可能到2022年底才量產。使用單一域控制器,也離不開1G車載以太網物理層芯片,而1G車載以太網物理層芯片量產是在2019年。
首先一個問題,為什么要獨立制定一個車載以太網物理層標準?沿用傳統以太網物理層不更好么?
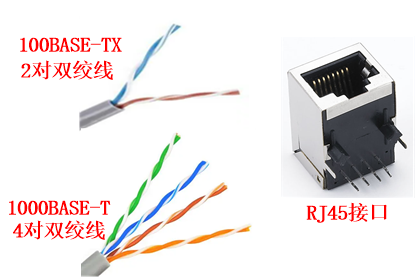
傳統以太網與車載以太網最大不同是傳統以太網需要2-4對線,車載以太網只需一對,且是非屏蔽的,僅此一項,可以減少70-80%的連接器成本,可以減少30%的重量。這是車載以太網誕生的最主要原因。同時也是為了滿足車內的EMC電磁干擾。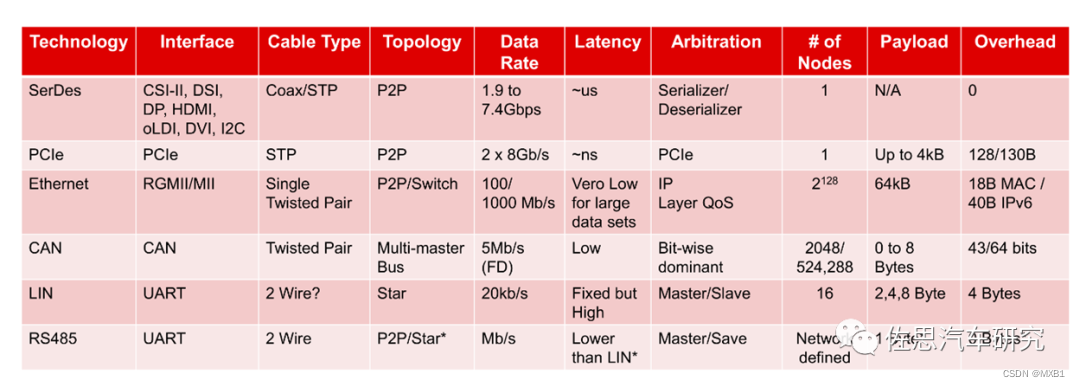
常見汽車傳輸界面特性一覽表。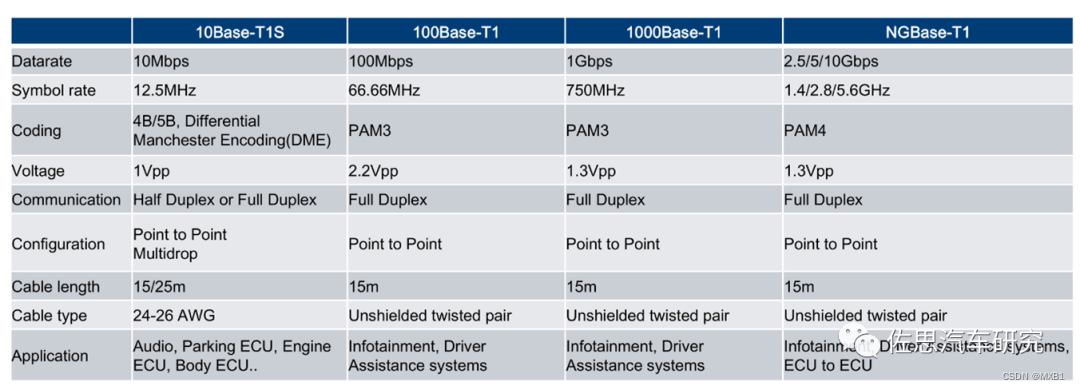
四個車載以太網物理層標準,車載以太網野心勃勃,10Base-T1S是試圖取代傳統的CAN網絡的。第一個1000Base-T1標準的物理層芯片是Marvell的88Q2112,雖然其推出時間是2015年10月,但在2019年才量產,典型應用如英偉達的旗艦盒子Pegasus。
特斯拉最新的HW3.0使用Marvell的88EA1512,是20年前的傳統以太網物理層標準。2020年10月,Marvell推出第三代產品,實際上88Q2112有兩代,第一代沒有量產,只是占個第一的位置。所以Marvell第三代型號是88Q222xM。
第三代特別增加對Open Alliance TC10,用于睡眠模式和喚醒。能夠滿足最嚴苛的ASIL-D級標準,在AEC-Q100溫度上達到1級標準,也就是最高可承受125°高溫,通常物理層芯片都是2級標準,即105°高溫。除了Marvell,還有德州儀器、博通能提供1000Base-T1標準的物理層芯片。臺灣Realtek有支持1000Base-T1標準物理層的交換機芯片。
博通在NGBase-T1的物理層芯片領域拔得頭籌,2020年11月,博通宣布推出BCM8989X 和BCM8957X,BCM8989X是業內第一個對應NGBase-T1(即IEEE 802.3ch)標準的MACsec 物理層芯片,到目前為止,博通是唯一能提供NGBase-T1芯片的廠家。BCM8957X則是業內第一個支持10Mbps 到10Gbps速率的L2/L3級車載以太網交換機芯片。特斯拉與博通在下一代FSD芯片上有合作,但不大可能將多G物理層嵌入FSD中,因為物理層芯片一般都是獨立的。還有一個IEEE 802.3cy,也就是10G以上車載以太網物理層標準,分別支持25、50、100G。
IEEE的車載以太網物理層基本上是全部照搬OPEN Alliance的標準,OPEN Alliance是非盈利性的汽車行業和技術聯盟,旨在鼓勵大規模使用以太網作為車聯網標準。OPEN Alliance成員單位利用以太網的可擴展性和靈活性實現車聯網低成本通信,減少通訊復雜性。以太網通信網絡也是實現未來自動駕駛和智能網聯汽車功能的重要組成部分。自建立以來,OPEN Alliance的成員單位已增至近400家。
10BASE-T1S即IEEE 802.3cg也就是 OPEN Alliance 的TC14 ,100BASE-T1即IEEE802.3bw也就是OPEN Alliance TC1,100/1000BASE-T1 ECU測試標準即OPEN Alliance的TC8, 1000BASE-T1即IEEE802.3bp也就是OPEN Alliance 的TC12,2.5/5/10GBASE-T1即IEEE802.3ch也就是OPEN Alliance 的TC15標準。
OPEN Alliance有18家發起(Promote)會員單位,2011年11月,寶馬、博通和NXP成立OPEN Alliance,后來還有Marvell(原是Adopter會員,后提升)、通用、豐田、沃爾沃、大眾、捷豹路虎(曾經是,目前退出)、現代、博世、瑞薩、大眾、雷諾(曾經是,目前退出)、大陸汽車、奔馳(曾經是,目前退出)、三星哈曼(曾經是,目前退出)、現代、中國臺灣瑞昱(曾經是,目前退出)。Promoter會員單位只能有原始的三家邀請才能成為Promoter會員單位。
另外每年交1500美元就能成為的Adopter會員,其中包括20家中國企業(可能有遺漏),這20家中國企業是:北汽、北京汽車研究總院、北汽福田、華晨汽車、一汽集團、航盛電子、臺灣HTC、惠州華陽、豪恩、恒潤科技、東軟、寧波卡倍億、泛亞汽車、臺灣和碩、沈陽東信創智、深圳鵬毅實業、臺灣凌陽創新、臺灣凌陽科技、信利光電、信利半導體。雖然IEEE制定了標準,但車載以太網ECU測試標準是OPEN Alliance制定的。這里面涵蓋了行業的全部有影響力的企業。
物理層標準再分為三層,即PCS、PMA和PMD。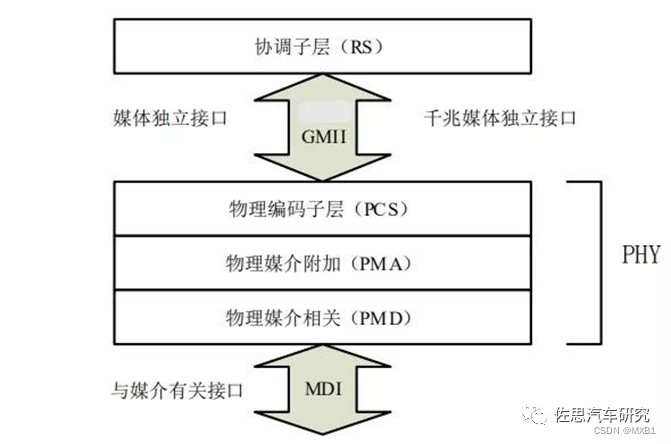
PMA比較關鍵,變化也比較多。PCS子層負責3B2T(千兆車載以太網)編碼,它可以把從GMII口接收到的8位并行的數據轉換成10位并行的數據輸出。因為10比特的數據能有效地減小直流分量,降低誤碼率,另外采用3B2T編碼便于在數據中提取時鐘和進行首發同步。
可以把PCS兩頭看成GMII接口和TBI接口。PMA子層進一步將PCS子層的編碼結果向各種物理媒體傳送,主要是負責完成串并轉換。PCS層以125M的速率并行傳送10位代碼到PMA層,由PMA層轉換為1.25Gbps的串行數據流進行發送,以便實際能得到1Gbps的千兆以太網傳送速率。可以把PMA子層的兩頭分別看做TBI接口和SGMII接口。PMD子層將對各種實際的物理媒體完成接口,完成真正的物理連接。
因為是非屏蔽單對線,擔心有RF泄露,因此美國FCC會對此類產品做檢驗。車載以太網的測試是大麻煩,直到2021年2月,泰科才第一個推出滿足IEEE 802.3ch MultiGBASE-T1規范的車載以太網測試系統。
全雙工通信及 PAM3 信令為在真實世界條件下驗證 ECU 增加了復雜度。大多數串行標準都在單工模式下工作,一次只有一臺設備通信,有些通信標準對發送和接收使用一條單獨的鏈路,而在汽車以太網中,主設備和從設備可以通過同一條鏈路同時通信。
因此,來自主設備的信號與來自從設備的信號相互疊加。主設備知道它發送的是哪些數據,它可以從疊加的信號中確定從設備的信號,反之亦然。盡管收發機是為處理這種情況而設計的,但在示波器上隔離信號,進行信號完整性測試或協議解碼幾乎是不可能的。
測試需要昂貴的硬件和軟件,還要有足夠強的學習能力,幾乎沒有人熟悉這個領域。這個在開發后期需要頻繁測試調整,租一套設備測試幾乎是不可能的。硬件昂貴,像高帶寬的示波器是很昂貴的,13G的示波器,大概200萬人民幣左右,硬件工程師得人手一個,可不是只買一個就行得,110G的示波器價格是百萬美元。頻譜儀,射頻信號源,網絡分析儀這些一旦上G帶寬,都是數百萬元價格。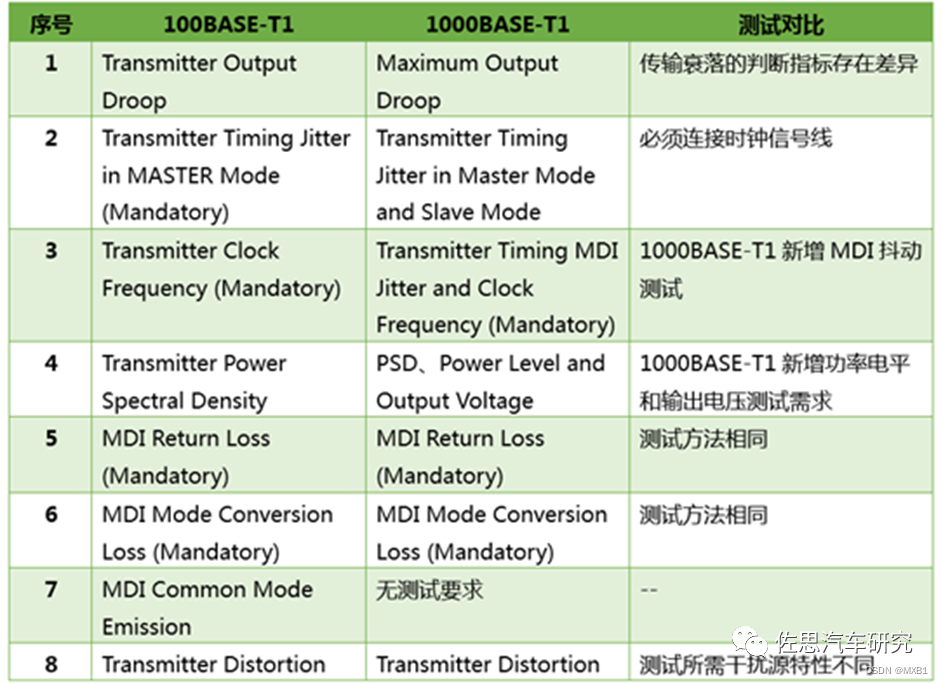
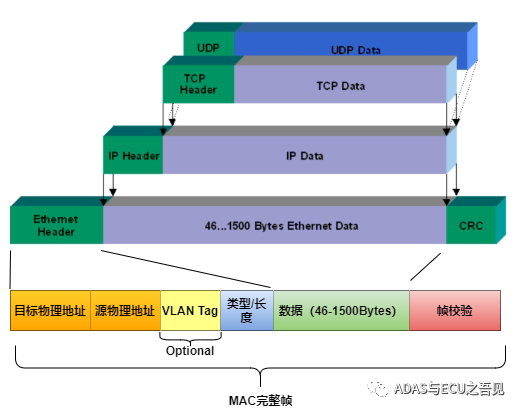
主要測試內容如上表。物理層芯片是一個技術門檻非常高的領域,全球只有NXP、博通、Marvell、瑞昱、Microchip、德州儀器六家能夠完成,因為物理層芯片是模擬領域。物理層芯片在發送數據的時候,收到MAC過來的數據(對物理層芯片來說,沒有幀的概念,對它來說,都是數據而不管什么地址,數據還是CRC),每4bit就增加1bit的檢錯碼,然后把并行數據轉化為串行流數據,再按照物理層的編碼規則(10Based-T的NRZ編碼或100based-T的曼徹斯特編碼)把數據編碼,再變為模擬信號把數據送出去。
網線上的到底是模擬信號還是數字信號呢?答案是模擬信號,因為它傳出和接收是采用的模擬的技術。雖然它傳送的信息是數字的,并不是傳送的信號是數字的。
眾所周知,模擬IC處理的信號都具有連續性,可以轉換為正弦波研究,而數字IC處理的是非連續性信號,都是脈沖方波。模擬電路比較注重經驗,設計門檻高,學習周期10-15年;數字電路則有EDA工具輔助,學習周期2-3年。模擬IC強調的是高信噪比、低失真、低耗電、高可靠性和穩定性。產品一旦達到設計目標就具備長久的生命力,生命周期長達30年以上的模擬IC產品也不在少數。如運算放大器NE5532,生命周期超過50年,現在還在用。
數字IC多采用低壓CMOS工藝,而模擬IC少采用CMOS工藝。因為模擬IC通常要輸出高電壓或者大電流來驅動其他元件,而CMOS工藝的驅動能力很差。此外,模擬IC最關鍵的是低失真和高信噪比,這兩者都是在高電壓下比較容易做到的。而CMOS工藝主要用在5V以下的低電壓環境,并且持續朝低電壓方向發展。
對于數字電路來說是沒有噪音和失真的,數字電路設計者完全不用考慮這些因素。此外由于工藝技術的限制,模擬電路設計時應盡量少用或不用電阻和電容,特別是高阻值電阻和大容量電容,只有這樣才能提高集成度和降低成本。某些射頻IC在電路板的布局也必須考慮在內,而這些是數字IC設計所不用考慮的。因此模擬IC的設計者必須熟悉幾乎所有的電子元器件特性,非15年以上經驗不可。
另一個門檻是CDR,即時鐘數據恢復,對于高速的串行總線來說,一般情況下都是通過數據編碼把時鐘信息嵌入到傳輸的數據流里,然后在接收端通過時鐘恢復把時鐘信息提取出來,并用這個恢復出來的時鐘對數據進行采樣,因此時鐘恢復電路對于高速串行信號的傳輸和接收至關重要。
對于高速的串行總線來說,一般情況下都是通過數據編碼把時鐘信息嵌入到傳輸的數據流里,然后在接收端通過時鐘恢復把時鐘信息提取出來,并用這個恢復出來的時鐘對數據進行采樣,因此時鐘恢復電路對于高速串行信號的傳輸和接收至關重要。
CDR接口的主要設計挑戰是抖動,即實際數據傳送位置相對于所期望位置的偏移。總抖動(TJ)由確定性抖動(DJ)和隨機抖動(RJ)組成。大多數抖動是確定的,其分量包括碼間干擾、串擾、占空失真和周期抖動(例如來自開關電源的干擾)。而隨機抖動是半導體發熱問題的副產品,無法科學預測,只能憑經驗猜測。
傳送參考時鐘、傳送PLL、串化器和高速輸出緩沖器都對會傳送抖動造成影響。一般來說對低頻的抖動容忍度很高,PLL電路能夠很好地跟蹤,恢復出來的時鐘和被測信號一起抖動。高頻比較麻煩,要設置PLL電路過濾掉,如何設置,沒有電腦輔助,全靠經驗,沒有15年左右的經驗是做不好的。
審核編輯:劉清





























 工商網監
工商網監
評論