 電子發燒友App
電子發燒友App


現在汽車的電子電氣架構逐步在更新,越來越多的ECU進行整合,從原來的分布式階段逐步演進到域控制器和中央計算架構。在架構演進過程中,支撐這一變革的底層芯片也在逐步發展,越來越多的主機廠關注的是一整套的解決方案,而不是獨立的芯片解決單獨的區域。面向未來電子電氣架構核心區域進行全場景布局的芯片廠商,將具備更明顯的競爭優勢。
主流OEM電子電氣架構的演變進度
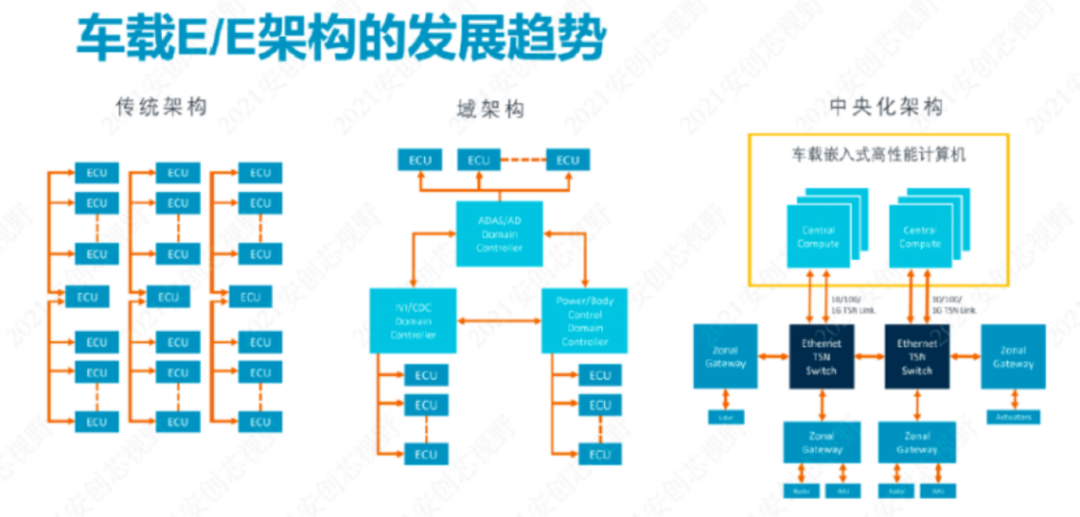
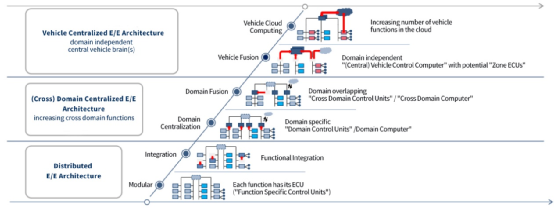
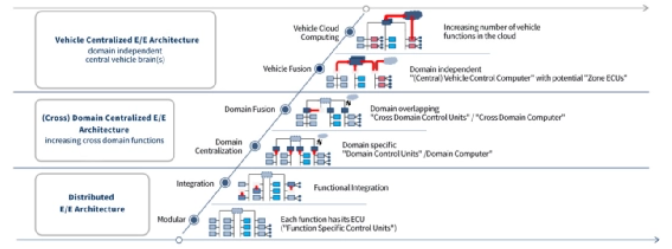
博世認為汽車電子電氣架構演變路徑為分布式、域集中、中央集中式。電子電氣架構逐步成為汽車產品的一個核心技術,過去汽車上的控制器相互獨立,軟件為嵌入式,整車做最終的集成即可,隨著分布式架構朝著域控制器,主機廠自己掌握中央控制系統,否則就會失去對汽車產品的控制權。
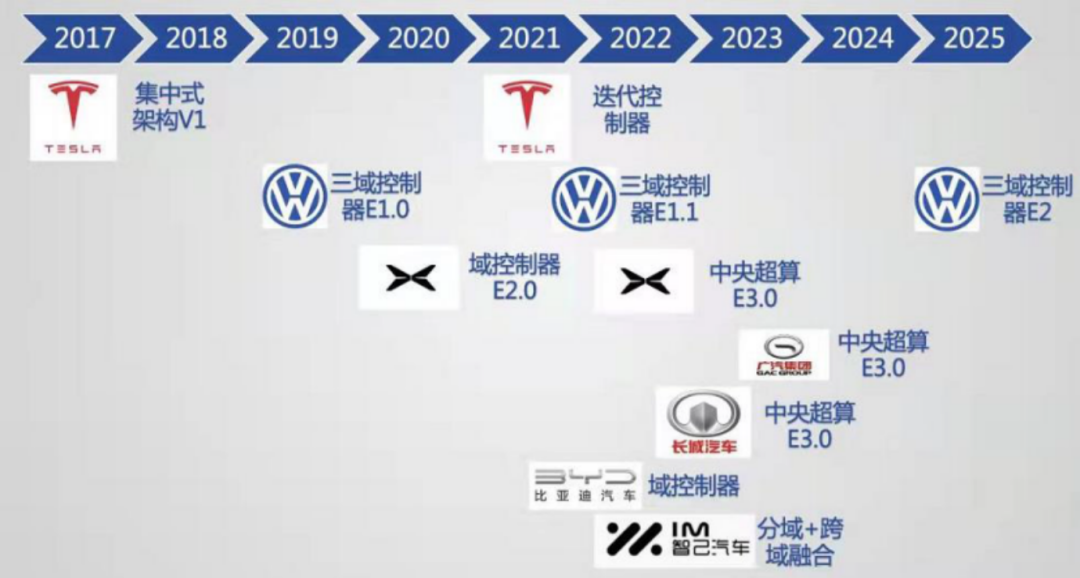
特斯拉Model3開啟了電子架構的變化,實現了中央域控制架構的雛形,被行業認為在電子電氣架構方面領先傳統車企6年以上。大部分車企的跨域電子電氣架構在2023年量產,比如今年量產的小鵬G9;一些傳統車企電子架構仍處于功能域早期,呈現“分布式ECU+域控制器”的過渡形態,向“中央計算單元+區域控制器”將可能耗時3-10年。我們來看看主流的主機廠和tier1的電子電氣架構發展進程。
1.1 大眾的電子電氣架構
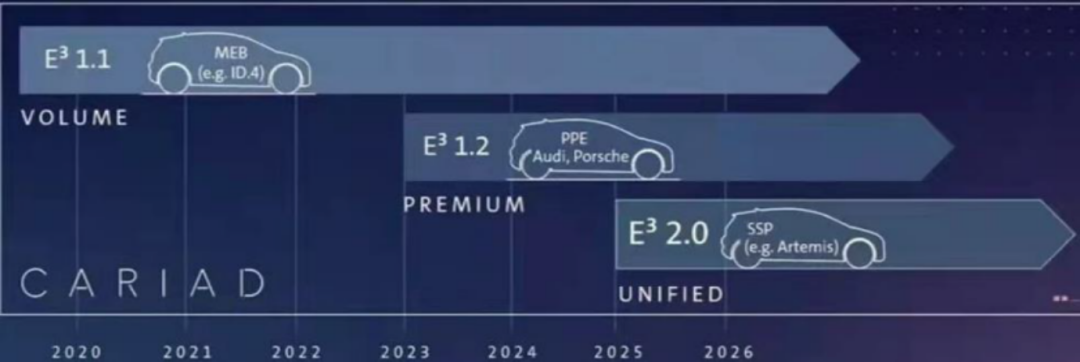
大眾汽車MQB平臺在2012年研發出來,到現在已經11年了,該平臺售賣的車型超過3600W臺,MQB平臺的電子電氣架構就是分布式,在平臺升級為MEB的平臺時,ID系列采用了E3架構。目前大眾的ID系列的電子電氣架構還處于E3 1.1版,在今年的PPE平臺上搭載E3 1.2版本,從路徑規劃來看在2025年才能進化到E3 2.0版。
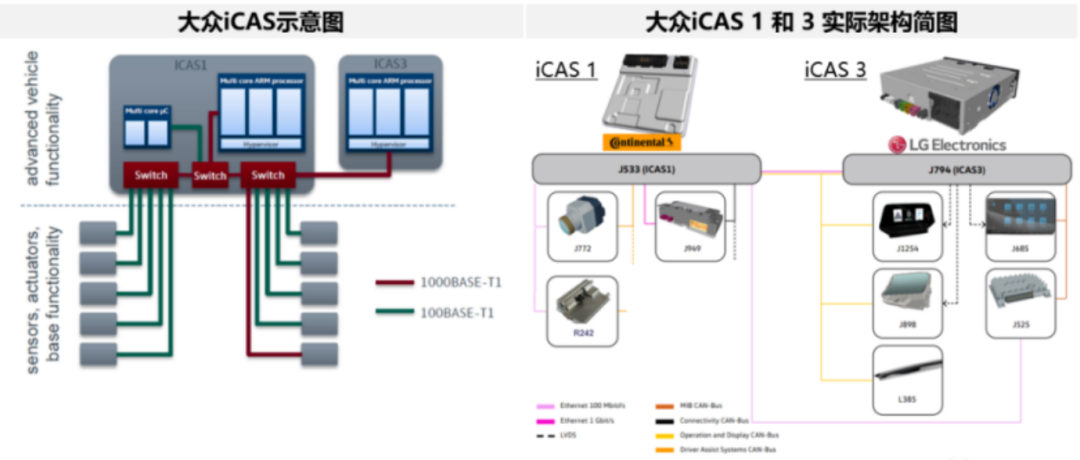
大眾的MEB平臺(首款車ID3)的E3架構
E3架構即由3個車輛應用服務器(ICAS,即In-Car Application )組成的新型集中式EE架構,具體包括:車輛控制服務器(ICAS1)、智能駕駛服務器(ICAS2)和智能座艙域(ICAS3);其中智能駕駛域ICAS2還在開發過程中,量產車型上搭載的依然是分布式架構方案。
綜合來看,大眾還是比較穩扎穩打,一步一步進行漸進式的架構推進,并沒有直接采用中央式架構,由此看的出來大眾是那種穩中求勝的選手。
1.2 小鵬的電子電氣架構
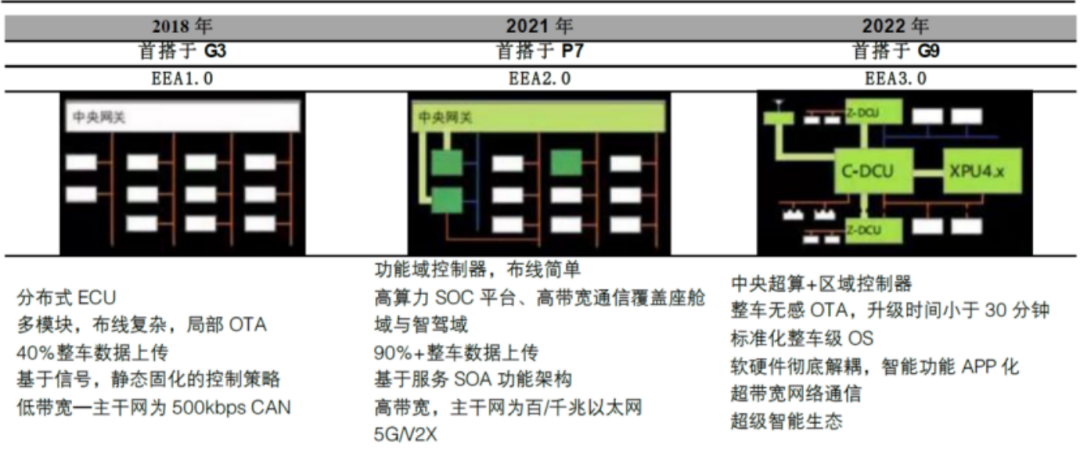
小鵬的電子電氣架構最近這幾年的演進非常不錯,在G3采用的電子架構還是傳統的架構時,在P7就升級為功能域控制器,而且該電子電氣架構在那個時間節點都是非常領先的。
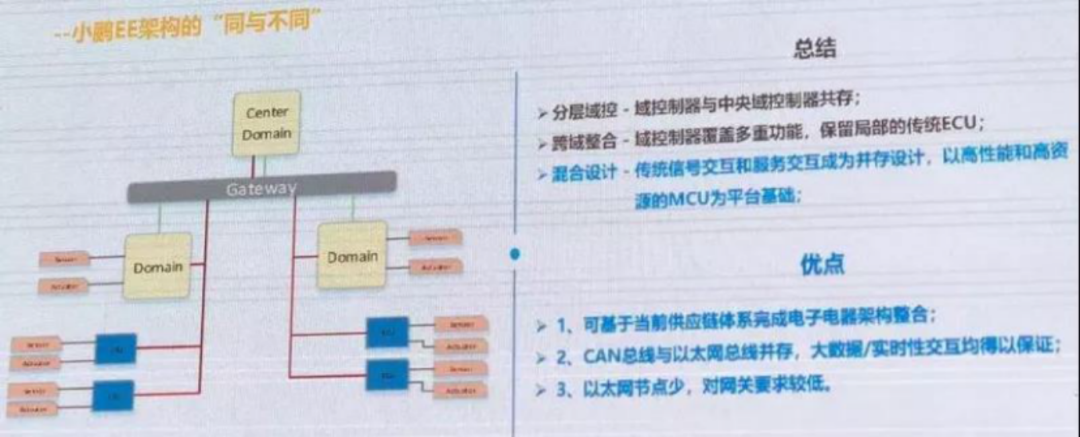
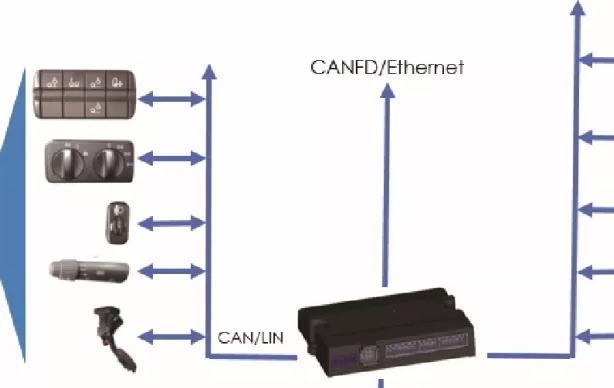
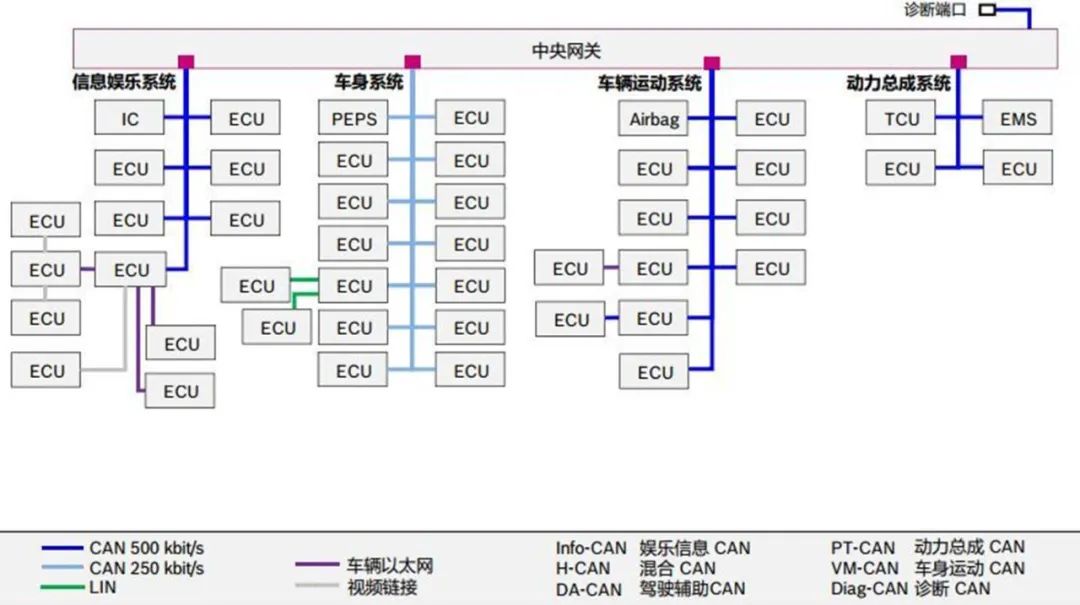
小鵬P7的搭載的第二代電子電氣架構, ECU數量減少了60%,分層域控,也就是功能域控制器和中央域控制器并存,域控制器覆蓋多重功能,保留了局部傳統的ECU。大部分車身功能遷移到域控制器,中央處理器可以實現儀表、中控導航和智能車身控制的大部分功能,而且集成中央網。
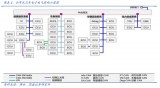
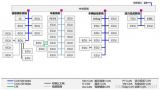
在剛剛量產的G9車型中,小鵬的電子電氣架構已經迭代到X-EEA 3.0版本了,成為首款可以支持 XPILOT 4.0的智能輔助駕駛系統的量產車。
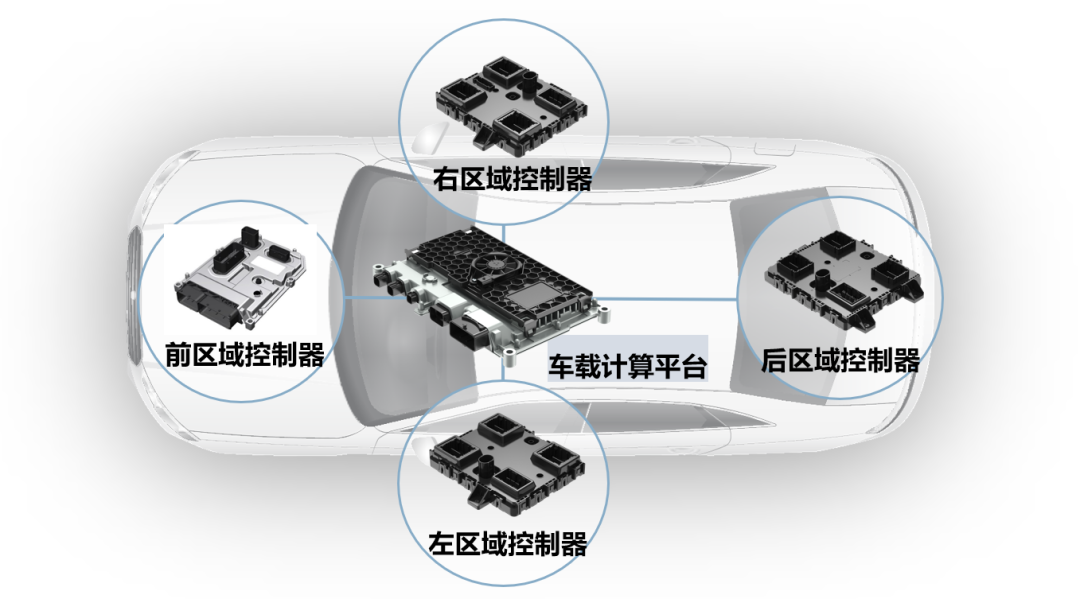
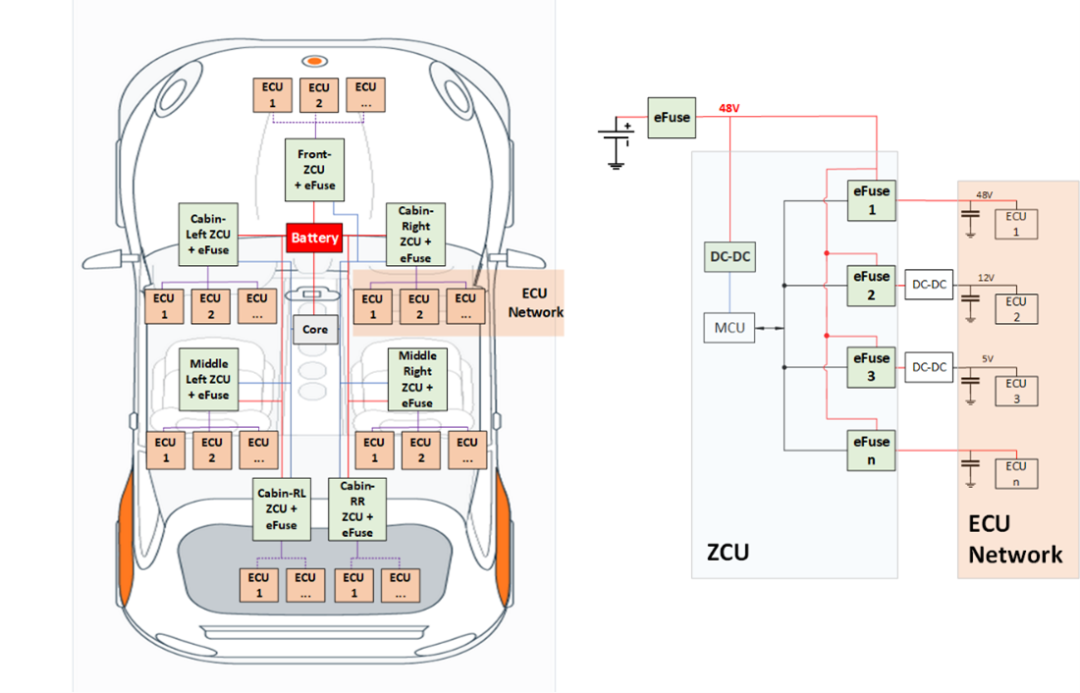
通過上圖可以看到X-EEA 3.0硬件架構方面,采用了中央超算+區域控制的硬件架構,中央超算包括車控、座艙、智駕3個域控制器,區域控制器分為左右控制器,將更多控制件分區,類似于特斯拉的架構,采用就近分配的原則,分區接管相應功能,大幅縮減線束。
1.3 特斯拉的電子電氣架構
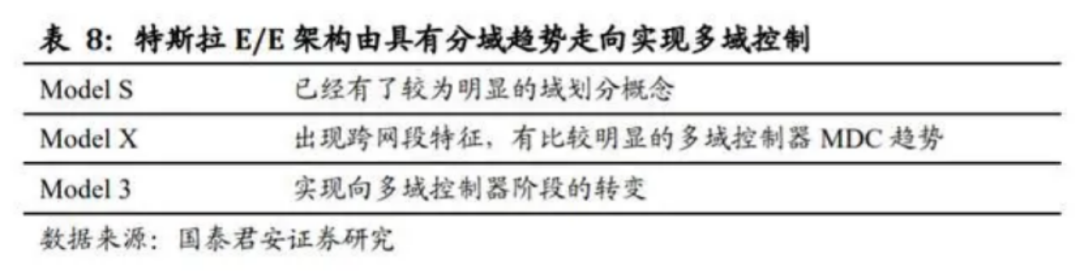
特斯拉在電子電氣架構方面是先驅者,2012年的model S有較為明顯的功能域,包括動力域 PowerTrain、底盤域 Chassis、車身域 ,ADAS模塊橫跨了動力和底盤域。
Model X 的部分控制器出現跨網段的特征,有比較明顯的多域控制器MDC 趨勢。比如中央車身控制器 Central Body Control Module 橫跨了底盤 Chassis、車身低速容錯 Body FT 以及車身 Body。2017年特斯拉推出的model 3突破了功能域的框架,實現中央計算+區域控制器的框架。
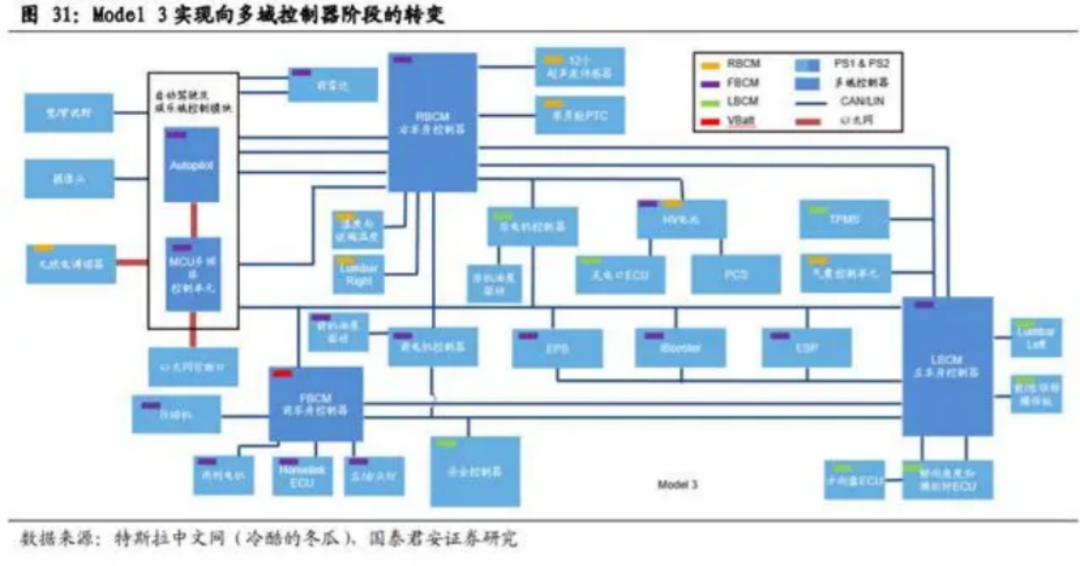
Model 3 標志著特斯拉從域控制器的階段直接進入多域控制器階段。單個控制器可以對接到傳統意義下不同功能的傳感器,通過一塊 ECU 來接入不同的傳感器得到的數據,對其進行分析,最終發出控制的指令。
Model 3 四大控制器 AICM(輔助駕駛及娛樂控制模塊)、BCM RH(右車身控制器)、BCM LH(左車身控制器)以及 BCM FH(前車身控制器)控制著整輛車幾乎所有的功能。
特斯拉三代車的電子電氣架構演進的本質原因,是不斷把車輛功能的控制權收回到自主開發的過程,model3的自動駕駛模塊、娛樂控制模塊、其他區域控制器、熱管理都是自己進行開發設計,實現了關鍵核心模塊掌握在自己手里,避免被別人卡脖子,即使剎車系統使用博世的ibooster,特斯拉也參與一腳,把自己的軟件加入到這個模塊里面,通過軟件更新實現剎車距離變短。
大部分企業規劃的跨域融合的電子電氣架構在2022年和2023年量產,基本上逐步開始域控制器,減少分布式ECU。2025年部分車企落地中央計算+區域控制器的電子電氣架構,從而實現軟硬件進一步的集成化,讓車廠對于軟件的控制權往回收。
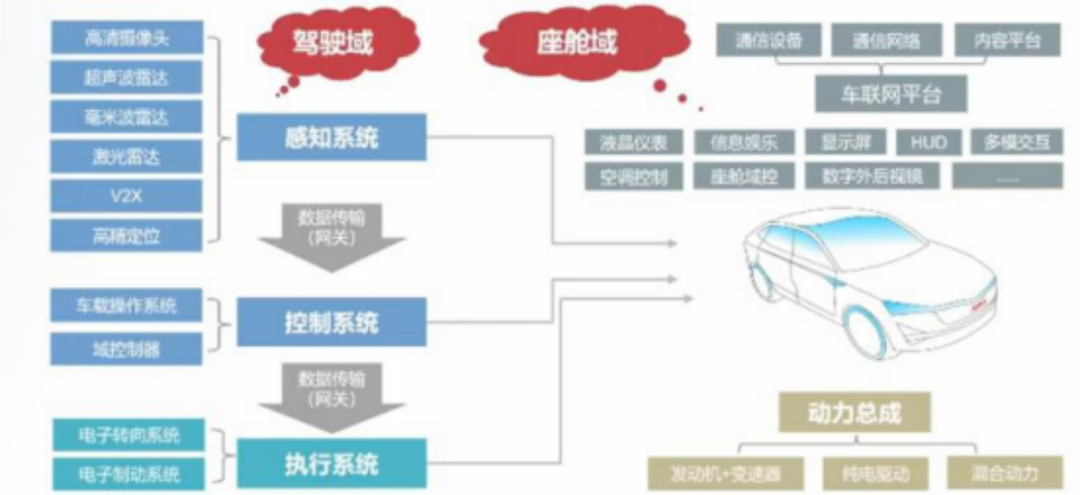
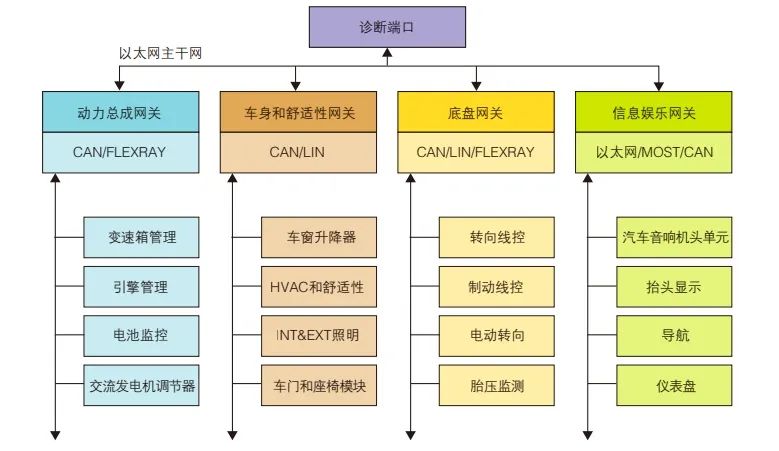
頭部主機廠公布的下一代電子電氣架構,將實現車輛功能域的進一步集成:“五域”(自動駕駛域+動力域+底盤域+座艙域+車身域)逐步向集成度更高的“三域”(自動駕駛域+智能座艙域+車控域+若干網關)邁進,即:除智駕域、座艙域外,將底盤、動力傳動以及車身三大功能域直接整合成一個“整車控制域(Vehicle Domain Controller,VDC)”。
在這個過程中,越來越多的主機廠關注的是一整套的解決方案,而不是獨立的芯片解決單獨的區域。除了主機廠外,Tier 1和芯片廠商也在深入探索跨域融合和中央計算架構的演進,在產品、架構和解決方案上與主機廠節奏保持一致。
核心域控芯片競爭格局
如果我們按照整車三大架構來進行分析:
根據安全性排序:車身底盤動力域>自動駕駛域>座艙域
從產品形態變化、產業鏈格局演變情況來看:座艙域>自動駕駛域>車身底盤動力域
由于目前座艙域在硬件上與底層的控制和算法做了物理隔離,能夠看到主機廠在座艙方面的嘗試最為激進,最典型的代表就是車內大屏與液晶儀表盤的滲透率快速提升。
而車身動力域由于安全性要求最高,并且和底層控制深度耦合,因此無論是產品形態還是產業鏈的格局,相對變化都較小。而自動駕駛域因為對算力要求遠超從前,因此產業鏈逐步增加了新的供應商。
而這幾個域里面,駕駛輔助/自動駕駛域、智能座艙域為汽車未來核心,因為這些域是直接關聯用戶體驗感受的,是目前提升空間最大的。
2.1智能座艙
可以看到有很多科技公司和傳統的車載芯片公司,都在全力以赴進行智能座艙域控制器芯片的布局。
智能座艙域控制器芯片市場主要玩家:
1.海外傳統汽車芯片廠商,主打中低端市場:NXP、德州儀器、瑞薩電子等;
2.海外手機領域的廠商,主打高端市場:聯發科、三星、高通等。
3.國內新興智能車芯競爭者:芯馳科技等。
隨著智能座艙時代的到來,除了常見的“一芯多屏”功能,對于座艙主芯片的算力,架構、外設都有更高的要求,特別是安全層面,這樣才能更好地保護用戶在智能座艙的數據安全和穩定性。
案例介紹:芯馳X9系列處理器
X9系列處理器集成了高性能CPU、GPU、AI加速器,以及視頻處理器,能夠滿足新一代汽車電子座艙應用對強大的計算能力、豐富的多媒體性能等日益增長的需求。可支持一芯多屏,同時覆蓋全液晶儀表、中控娛樂導航、副駕娛樂、抬頭顯示、電子后視鏡、DMS駕駛員監測系統、OMS乘客監測系統、虛擬空調面板、360環視+APA自動泊車輔助、DVR行車記錄儀、語音系統等所有座艙功能,支持艙泊一體。
同時,X9系列處理器集成了PCIe3.0、USB3.0、千兆以太網、CAN-FD,能夠以較小造價無縫銜接應用于車載系統。該款處理器還采用了包含Cortex-R5雙核鎖步模式的安全島,能應用于對安全性能要求嚴苛的場景。
智能座艙的主控芯片對于安全性越來越高,特別是要帶動儀表屏,這部分對于安全方面的功能安全至少要達到ASIL-B的功能安全,在安卓中控死機的情況下,依舊能保障儀表的正常運行。
剛過去不久的上海車展上,芯馳發布了X9系列的最新產品X9SP。
X9SP產品特性
- 12核ARM Cortex-A55處理器,100KDMIPS
- Imagination PowerVR 3D GPU,220GFLOPS
- 針對汽車應用場景優化的NPU, 8 TOPS
- 車規級ISP,高達1Gpixel/s圖像處理能力,支持800萬像素攝像頭輸入
- 高性能VPU,支持H.264/H.265/MJPEG編解碼,4Kp60
- 2路MIPI CSI / 2路MIPI DSI / 4路LVDS輸出
- 內置安全島,集成一組800MHz雙核鎖步ARM Cortex-R5F MCU
-?內置硬件安全模塊,集成一組800MHz雙核鎖步ARM Cortex-R5F MCU,支持國密認證SM2/SM3/SM4/SM9
- 支持9個攝像頭輸入,覆蓋360環視、DMS、OMS、DVR
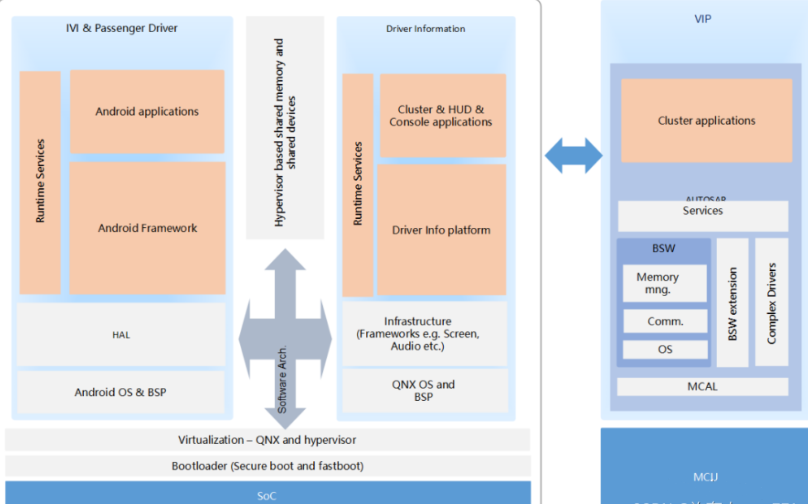
典型解決方案框圖
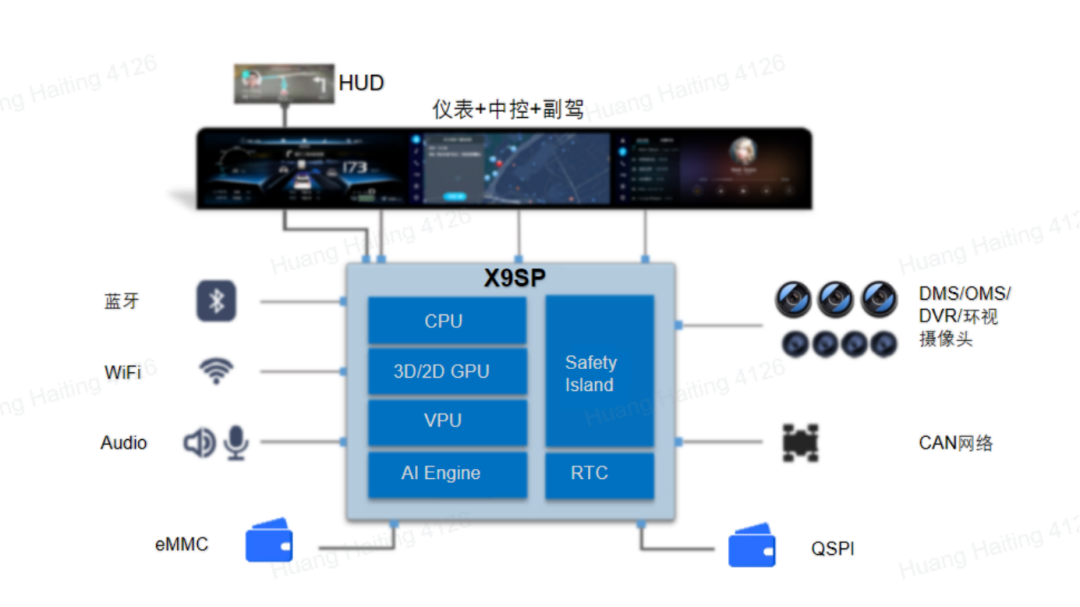
值得一提的是,X9SP?在無需使用Hypervisor的情況下,即可支持兩個操作系統的獨立運行,大大降低了開發難度,提升了系統資源的運行效率。在性能顯著提升的同時,X9SP和前一代產品X9HP保持了硬件Pin-To-Pin兼容和軟件兼容,一個月即可從X9HP平滑升級至X9SP,僅需9個月左右就可實現車型快速量產,最大程度優化開發成本,并同時大大降低研發投入。
從性能、安全認證等指標來看,芯馳座艙產品已經達到國際一流水平,是國內創新型車芯廠商中座艙芯片量產進度最快的企業之一,擁有幾十個重磅定點車型。上汽、奇瑞、長安等車企旗下搭載芯馳智能座艙X9系列芯片的車型已量產上市;同時,芯馳與斑馬智行聯合發布智能座艙生態化平臺,推進艙行泊一體落地。
案例介紹:高通8155處理器
高通驍龍8155是由消費芯片“魔改”而來的芯片,采用1+3+4的8核心設計,其中大核主頻為 2.96GHz,三個高性能核心主頻為 2.42GHz,四個低功耗小核主頻為 1.8GHz。芯片的AI算力可以達到8TOPS,能夠實現藍牙5.0、WI-FI6等連接能力。
高通8155的性能比較強,不過因為基于手機芯片改進而來,其本質是耐用的消費電子芯片,在電路設計之初沒有考慮ECC這類汽車芯片需要的功能。如果因為干擾或內部數據傳輸總線隨機的錯誤,其車內顯示屏就無法正常工作或者不完整,表現為顯示花屏、閃屏或者黑屏。不過,雖然在某些安全性、耐用性上沒有傳統汽車芯片那么高,在新勢力車企及一些高端車型上,高通8155仍深受青睞。目前,威馬W6、WEY摩卡、吉利星越L等車型都搭載了SA8155P芯片。
2.2 智能駕駛
智能駕駛正在逐漸回歸理性,不再盲目跟風追求高算力。此前比亞迪董事長王傳福提到:“無人駕駛都是扯淡,弄個虛頭巴腦的東西,那都是忽悠,它就是一場皇帝的新裝。”在他看來,未來的主要方向還是高級輔助駕駛,需要駕駛員扶著方向盤,特殊路況的無人駕駛應用場景目前還很少。ADAS算法、高階輔助駕駛在資本裹挾下被神化了,市場會慢慢回歸理性。
當下,行泊一體域控制器需求正在全面爆發階段。
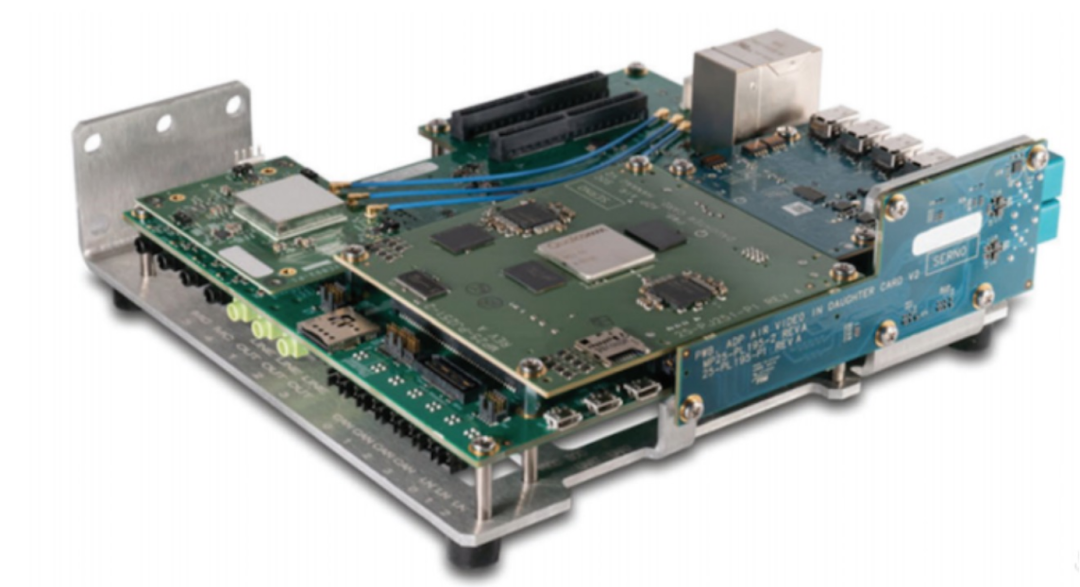
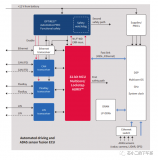
案例介紹:德州儀器 TDA4
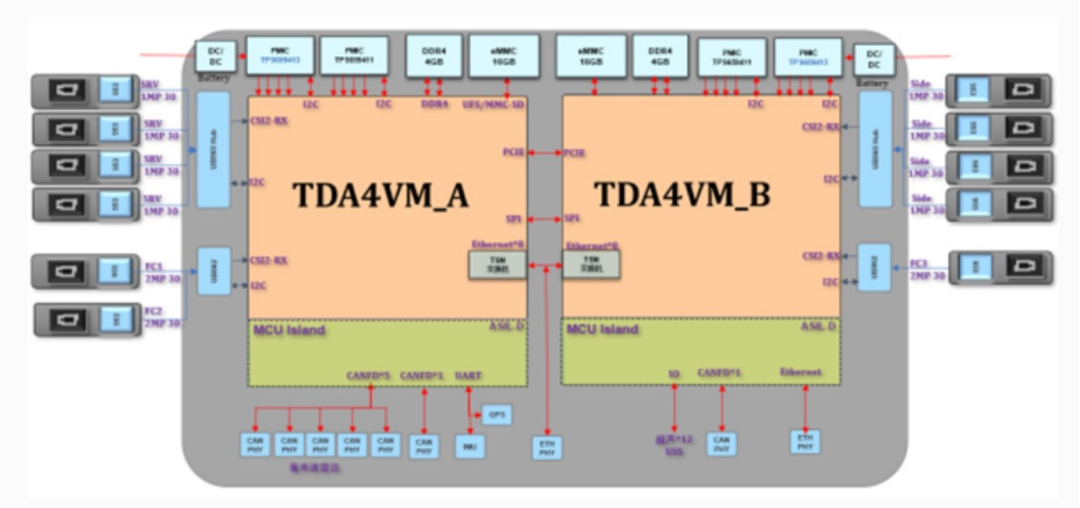
基于 TI 的雙 TDA4VM 的 NOA 行泊一體化方案采用了兩顆 TDA4VM,單芯片 C7x/MMA 可以實現 8TOPS 算力,總算力 16TOPS 。該方案接入了 11 個攝像頭、5 個毫米波雷達 12 個超聲波雷達,即 11V5R12USS 行泊一體化解決方案。其系統框圖如上圖所示,TDA4VM_A 接入了四個全景攝像頭和兩個前向攝像頭。TDA4VM_B 接入了四個側視攝像頭和一個前向攝像頭。
行車方面可實現盲區檢測 (BSD)、開門預警 (DOW)、車道偏離預警 (LCW)、前向碰撞預警 (FCW)、智能遠光燈控制 (IHC)、前方穿行預警 (FCTA)、后方穿行預警 (RCTA)、后方碰撞預警 (RCW)、自適應巡航 (ACC)、車道保持輔助 (LKA)、手動變道 (PLC)、交通擁堵輔助 (TJA)、高速輔助駕駛 (HWA)、自動緊急制動 (AEB)、交互式高速公路自動駕駛 (HWP)、交互式高速公路擁堵自動駕駛 (TJP)、自動輔助導航駕駛 (NOA) 等功能;
泊車方面可實現全景功能 (AVM)、自動泊車輔助 (APA)、遙控泊車輔助 (RPA)、家庭區域記憶泊車 (HAVP) 等功能。
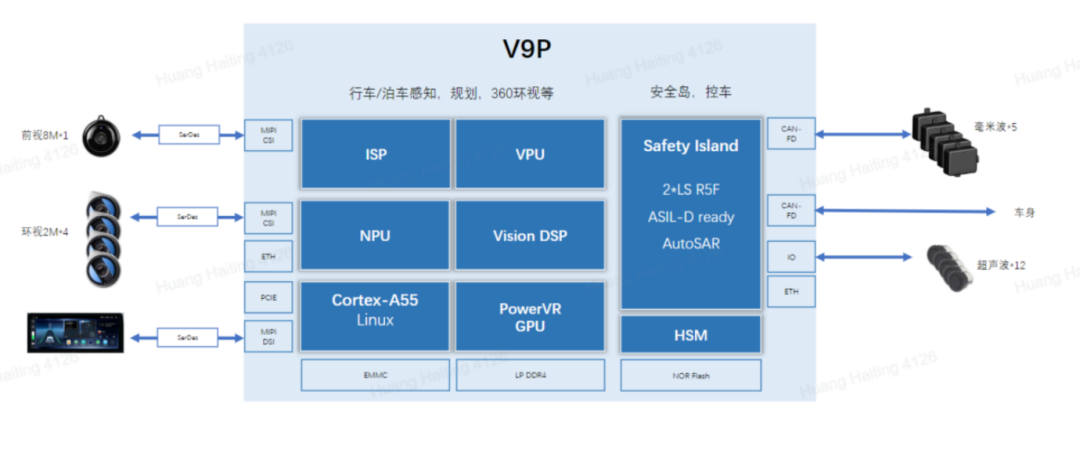
案例介紹:行泊一體智駕芯片芯馳V9P
芯馳推出的L2+單芯片量產解決方案V9P,CPU性能70KDMIPS,GPU達200GFLOPS,整體AI性能20TOPS,在單個芯片上即可實現AEB(自動緊急剎車)、ACC(自適應巡航)、LKA(車道保持)等主流L2+ ADAS的各項功能和輔助泊車、記憶泊車功能,并能集成行車記錄儀和高清360環視。V9P內置獨立安全島,無需外置MCU便可實現真正的單芯片行泊一體方案,有效地節約系統成本。
產品特性:
-NPU整體算力達20TOPS,同時支持算力擴展
-8核ARM Cortex-A55 CPU, 70K DMIPS
-Imagination PowerVR 3D GPU, 200GFLOPS
-車規級ISP模塊,高達1Gpixel/s圖像處理能力,支持800萬像素攝像頭輸入
-高性能VPU,支持H.264/H.265/MJPEG編解碼, 4Kp120
-2路MIPI-CSI接口/ 1路Parallel CSI接口/2路MIPI DSI接口
-支持最多9路攝像頭輸入及2路高清顯示
-8路CAN-FD接口/2路千兆以太網/2路PCIe 3.0接口
-內置安全島,集成800MHz雙核鎖步ARM Cortex-R5F MCU
典型解決方案框圖
面向量產的APA解決方案(全自動泊車輔助系統)。該方案采用4個魚眼攝像頭和12個超聲波雷達實現APA功能,基于CV算法,完成對車位的識別和障礙物檢測,結合超聲波雷達,適應多種車位和工況。
在L2+及以上高階智能駕駛領域,天準科技、東軟睿馳等Tier 1廠商也在推進國產化的域控制器落地方案。
案例介紹:天準科技TADC系列高階自動駕駛域控制器
天準推出了基于地平線雙征程5+芯馳X9U+芯馳E3平臺的TADC-D52高配域控制器方案,面向城市NOA和記憶泊車、自動泊車、360環視等高階自動駕駛場景;以及基于地平線單征程5+芯馳G9H+芯馳E3平臺的TADC-D51中配域控制器方案,面向高速NOA和記憶泊車、自動泊車、360環視等自動駕駛場景。兩款產品已于2022年8月實現全部功能的一次性點亮,并于2023年3月份完成全部的DV測試并順利通過,將在2023年下半年完成PV測試達到量產狀態。
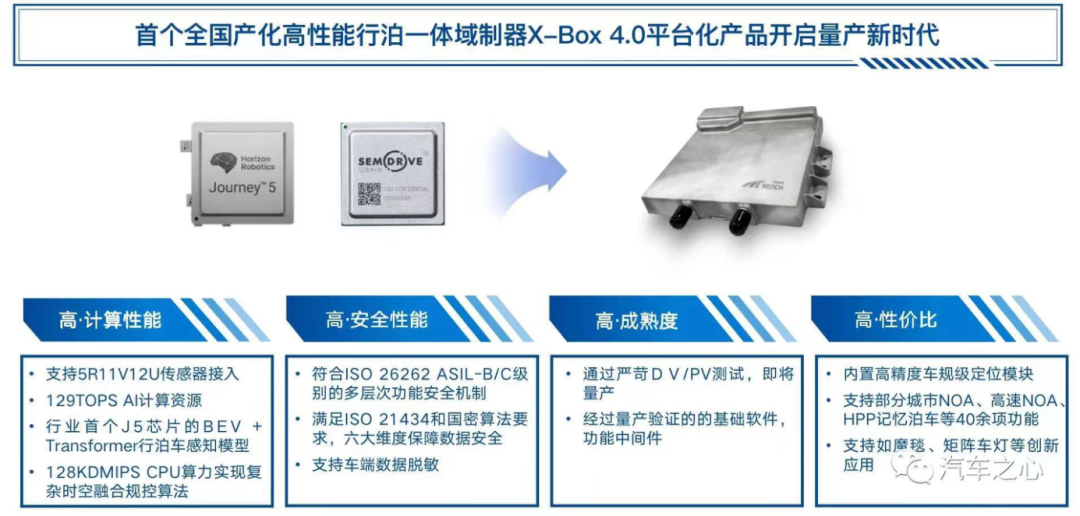
案例介紹:東軟睿馳自動駕駛域控制器X-Box4.0
東軟睿馳自動駕駛域控制器X-Box4.0是基于SDV開發模式下的全新L2+級別域控制器標準品。東軟睿馳基于芯馳X9系列以及地平線征程5系列人工智能芯片,實現了中國自動駕駛產業自主化芯片、算法、軟件、硬件在研發和量產應用鏈條方面的全面打通。
全場景芯片布局有助于車廠電子電氣架構演進
隨著主機廠電子電氣架構的不斷演進,在集中式域控制器架構的核心主芯片選擇上,理想情況下,主機廠更愿意選擇同一家車規級SoC芯片廠商,供應鏈更簡單,配合度更緊密,軟硬件的適配性更好,可以快速做一些功能的融合設計與開發。從這個角度來說,做核心域控車規芯片全場景布局的廠商在未來將更具有競爭優勢。
以芯馳為例,由于在智艙、智駕、網關和MCU控制類芯片均有布局,作為芯片廠商芯馳率先推出了面向未來中央計算的架構SCCA2.0,給主機廠提供底層參考。
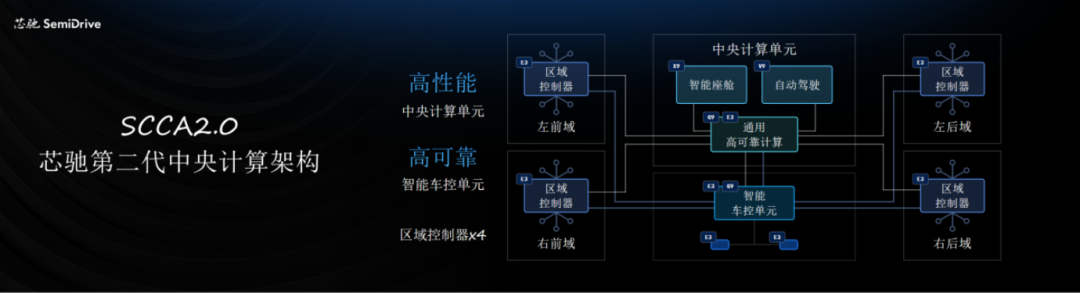
高性能中央計算單元:?采用高性能X9、V9處理器作為開放式計算核心,并集成G9和E3用于高可靠運算,CPU總算力達到300KDMIPS,作為未來汽車的大腦,實現智能座艙、自動駕駛、整車的車身控制,并提供高速網絡交互和存儲共享服務等功能,未來芯馳將持續升級,把上述功能逐步集成到一顆芯片上。
高可靠智能車控單元:采用G9處理器和E3 MCU構成的高性能智能車控單元(Vehicle HPC)作為底盤域+動力域的集成控制器,實現底盤和動力的融合以及智能操控。
4個區域控制器:以高性能高可靠的E3多核MCU為核心,實現在車內四個物理區域內的數據交互和各項控制功能。
6個核心單元之間采用10G/1Gbps高性能車載以太網實現互聯,并采用冗余架構,既確保了低延遲高流量的數據交換,又能確保安全性。
SCCA2.0是一個足夠開放的系統,既可以全套采用芯馳的全場景芯片方案,也能夠兼容其他的芯片產品,靈活匹配,全面賦能車企。
中央計算,需要將原本不同的域控制器融合在一起,它不僅僅是堆砌算力那么簡單,而是需要在硬件和軟件上,漸進式的不斷打通和磨合,因此中央計算不會一蹴而就,它需要芯片廠商和車廠、Tier1以落地量產為目標,共同摸索前行。
在傳統分布式架構時期,主要由少數幾家國際巨頭掌握行業話語權,希望在電子電氣架構變革的過程中,更多的中國廠商能積極參與,為行業的發展做出更多貢獻。
編輯:黃飛
?























 工商網監
工商網監
評論