 電子發(fā)燒友App
電子發(fā)燒友App


“如果下半年能有體驗不錯的通勤模式落地,我會很驚訝。”自動駕駛技術(shù)專家Brian向《電動汽車觀察家》表示,“但如果有人做出來了,確實能解決80%的出行需求。”
在特斯拉的NOA(導(dǎo)航駕駛輔助)概念之后,今年中國企業(yè)提出了智能駕駛的“通勤模式”——在通勤場景下的端到端智能駕駛輔助。 ? 今年3月,小鵬汽車首個提出“通勤模式”概念,并于6月底在小鵬G6上市發(fā)布會上將其命名為Ai代駕;同樣在6月,大疆發(fā)布“記憶行車模式”將落地寶駿云朵;理想汽車則直接命名為通勤NOA;6月27日,理想汽車在北京望京地區(qū)通勤NOA功能測試,并表示將在下半年開始上線……
覆蓋用戶80%出行場景需求的通勤模式,是解決自動駕駛商業(yè)模式困境的殺手級應(yīng)用?還是城市NOA落地難的權(quán)宜之計?
01
無圖?還不行
通勤模式折射出當(dāng)下中國玩家在量產(chǎn)自動駕駛過程中,難以“脫圖”的現(xiàn)實困境。
盡管目前小鵬、大疆、理想都未公布其“通勤模式”的具體技術(shù)方案,但《電動汽車觀察家》在采訪中了解到,多趟建圖+記憶人類駕駛員行駛軌跡是通勤模式的底層技術(shù)概念。
零束科技智駕產(chǎn)品線負(fù)責(zé)人張睿在焉知智能電動汽車年會上也明確表示:“記憶行車采用單趟一鍵建圖、多趟對齊的方式來實現(xiàn)特定場景下,一個低成本方案的出行體驗。”
所謂“低成本”對應(yīng)的自然是高成本的高精度地圖。
按照四維圖新公布的數(shù)據(jù),一公里高精地圖的采集成本約為1萬元。其目前已有30萬公里高精地圖的維護、更新費用為40-50億元,成本、鮮度和覆蓋范圍限制著高精地圖從高/快速路走向城區(qū)路段。
但另一方面,高精地圖的好是“誰用誰知道”,其大幅降低了自動駕駛系統(tǒng)完成“定位、路徑規(guī)劃和駕駛決策”這些核心任務(wù)的難度等級。
在信息豐富、高確定性的高精地圖的幫助下,車輛只需將全球定位系統(tǒng)(GPS)、慣性測量單元(IMU)、輪速計、激光雷達(dá)、攝像頭等傳感器獲得的數(shù)據(jù)與高精地圖數(shù)據(jù)比對,即可獲得車道級的精準(zhǔn)定位。
脫離高精地圖,意味著車輛僅能夠依靠上述傳感器,在車道線模糊/消失、道路被遮擋、交通標(biāo)示不一定清晰的“混亂”現(xiàn)實中進行車道級的定位。因為“站錯”車道對之后的路徑規(guī)劃將是災(zāi)難性的錯誤。
基于高精地圖精確尺寸的超視距地圖環(huán)境信息,車輛在出發(fā)前,就能將“從遠(yuǎn)通橋上機場高速”這樣模糊的導(dǎo)航信息,捆綁成為“從遠(yuǎn)通橋右側(cè)兩車道,進入一車道分岔路,進入機場高速左側(cè)兩車道”的精確路徑規(guī)劃,進而執(zhí)行時的軌跡規(guī)劃可以簡單為拆解成橫向和縱向。
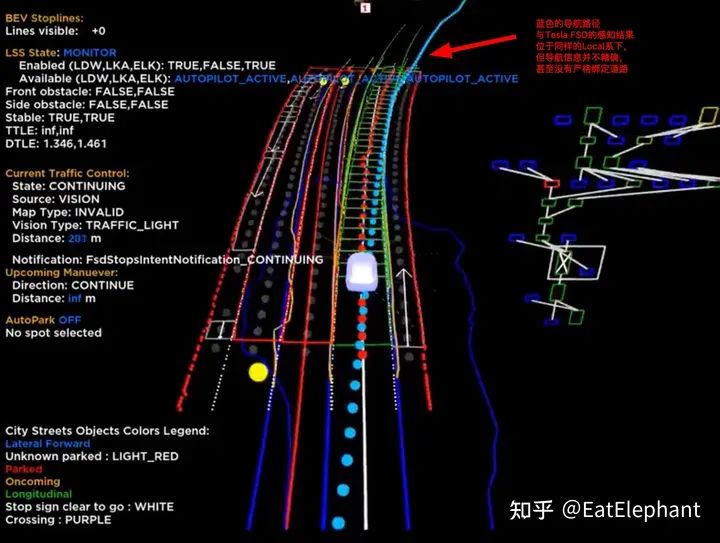
Tesla FSD的導(dǎo)航信息與感知同在Local坐標(biāo)系下,但是并不精確,也沒有嚴(yán)格綁定車道 ? 脫離高精地圖,意味著車輛要捆綁“噪聲”眾多的感知實時地圖和導(dǎo)航路徑,而之后的駕駛決策就要在這樣不確定的環(huán)境中做出。
“無圖”意味著自動駕駛系統(tǒng)的感知、定位、規(guī)劃和決策能力上限要大幅提升。但顯然,目前自動駕駛系統(tǒng)的能力提升速度追不上城市場景的難度增長速度。“圖”仍是當(dāng)下自動駕駛玩家量產(chǎn)時的必選項。
? 目前除特斯拉之外,各家已經(jīng)推送的城市領(lǐng)航功能仍是有圖方案。
四維圖新CEO程鵬公開表示:“終端(車企)現(xiàn)在提SD Pro,即SD地圖(標(biāo)準(zhǔn)地圖,精度10米左右)加上HD(高精地圖,精度10厘米左右)的車道連通性等信息”。使用SD Pro地圖時,高精地圖主要在云端用于訓(xùn)練,需要時將其賦分給車端的SD地圖。
值得注意的是,即使是從無圖出發(fā),積累了極高的感知和定位Know how的特斯拉,目前在擁擠的城市路況中也表現(xiàn)得頗為掙扎。
02
城市NOA到無圖之間差多少個通勤模式?
通勤模式則試圖為仍在提升感知和定位能力的中國自動駕駛量產(chǎn)玩家們,提供一條當(dāng)下就能“進城”的捷徑:通過多趟建圖和記憶駕駛員軌跡,不依靠高精地圖實現(xiàn)定位和路徑規(guī)劃。
如果將自動駕駛系統(tǒng)的工作過程簡單拆解,可分為感知和決策兩大部分。
感知是基于傳感器數(shù)據(jù),通過場景重建、要素識別、關(guān)鍵目標(biāo)重組和自車重新定位,來輸出包括道路全局信息和自車位姿的“可行駛空間”。
決策則基于可行駛空間來進行路徑、運動軌跡的規(guī)劃,整個底盤作為執(zhí)行器,執(zhí)行這些決策規(guī)劃命令。
?
Tesla FSD的感知中灰色區(qū)域代表不可通行區(qū)域,感知元素的透明度代表感知的置信度 ? 有高精地圖時,感知系統(tǒng)可將“可行駛空間”構(gòu)筑在高精地圖精確穩(wěn)定的虛擬空間中,難度相對較小。沒有高精地圖時,感知系統(tǒng)的“可行駛空間”需要無限逼近的現(xiàn)實世界,決策系統(tǒng)才能做出正確的規(guī)劃,在“混亂”的城市路況下實現(xiàn)難度極高。
?
? 通勤模式則在有圖和無圖之中構(gòu)建一個“中間帶”。
具體而言,“通勤系統(tǒng)”在同一路段多趟往返時,完成自車建圖、環(huán)境目標(biāo)語義識別的工作,同時錄制人類駕駛員在該路段的行駛軌跡: ?
利用自身感知系統(tǒng)(攝像頭、激光雷達(dá)、毫米波雷達(dá)、GPS、IMU、輪速計)數(shù)據(jù)輸入,構(gòu)建起通勤路段信息豐富的地圖并永久存儲,獲得局部路段的全局信息;
對路段中的關(guān)鍵要素進行語義識別記憶,如一段綠化帶、一個限速牌、一個紅綠燈、一個路口等。將這些檢測到的、描述的和定位的地標(biāo)永久儲存,以描述車輛軌跡的相對位置;
人類駕駛員的行駛軌跡則直接賦予了系統(tǒng)一條車道級的路徑和運動軌跡。
基于上述信息,車輛便能夠像使用高精地圖一樣,通過檢測、對齊目標(biāo),恢復(fù)車輛相對于存儲軌跡的姿態(tài)。
?
大疆五菱記憶行車方案 ? 相比于目前重建圖的方案,Brian認(rèn)為,“通勤模式”應(yīng)以記憶軌跡的為主,以多趟建圖為輔的原則來設(shè)計系統(tǒng)實現(xiàn)。
其中記憶軌跡不應(yīng)僅是一組全局坐標(biāo)下經(jīng)緯度姿態(tài)組成的點串,同時還應(yīng)包含在軌跡不同位置自車駕駛的動作信息以及他車和周圍環(huán)境的信息等。
記憶軌跡一方面幫助模型直接聯(lián)合輸出與靜態(tài)道路元素融合一起的導(dǎo)航路徑軌跡;另一方面沿途記憶的各類動作和環(huán)境信息可輔助規(guī)控在一定的不確定性中來進行行為決策。
而且,多條被跑通的通勤路線組合后,就可能為城市領(lǐng)航功能落地提供“底圖”。小鵬表示,AI代駕的路線可以分享給其他用戶;理想則表示,通勤NOA密集跑通的區(qū)域,將能夠更快落地城市NOA。
一位高精地圖專家告訴《電動汽車觀察家》:車端傳感器多趟建圖可實現(xiàn)亞米級的精度,可以滿足低速情況下,城市自動駕駛所需。
均勝電子副總裁郭繼舜也表示,通勤模式可以通過構(gòu)建語意地圖,幫助企業(yè)無需專門投入,通過眾包模式實現(xiàn)地圖數(shù)據(jù)庫的動態(tài)維護工作,降低企業(yè)的地圖維護成本。而且通勤模式如果成為眾多用戶高頻使用的駕駛輔助功能,也將通過數(shù)據(jù)閉環(huán)為企業(yè)提供更多的感知決策所需的訓(xùn)練數(shù)據(jù)。
03
通勤模式解不了城市領(lǐng)航的難
想法很好,但果真能落地嗎?
或許是因為算法是進城最需要提升能力上限的部分,在《電動汽車觀察家》的采訪過程中,高精地圖和工程專家都看好通勤模式,感知、決策的算法專家卻普遍對能否落地及落地可用性抱有疑慮。
疑慮一方面來自對多趟建圖質(zhì)量的懷疑。
在時間上,地圖采集車多在凌晨、半夜等車少路空的時段出動,通勤車則多在路況擁堵的上下班時段,眾多動態(tài)物體會遮擋場景導(dǎo)致建圖質(zhì)量急劇下降。
?
道路信息極豐富的路口高精地圖 ? 在路徑上,地圖采集車會歷便采集路段的所有路口,以獲得完整的地圖信息。通勤路線建圖通常無法覆蓋所有車道和路口通行方向,對預(yù)測其它路口方向的他車軌跡、規(guī)劃控制的應(yīng)變能力造成嚴(yán)重影響。
此外多趟建圖通常采用小圖拼大圖的方式。高精地圖在制圖過程中也常碰到兩個區(qū)域無法對齊的情況。所以通勤模式建設(shè)的地圖最終能否在合理的成本下,拼接成為一定區(qū)域內(nèi)自動駕駛所需的地圖,也值得懷疑。
疑慮的另一面是通勤模式的增益主要在提升靜態(tài)信息上,而自動駕駛系統(tǒng)在城市中更大的風(fēng)險來自于動態(tài)信息。
?
復(fù)雜的路口動態(tài)信息
即使擁有很好的路徑規(guī)劃,但如何與其它交通參與者進行高密度,且安全的互動,是同樣跑在城里的通勤模式和城市NOA面臨的核心難題,也是決定系統(tǒng)體驗的關(guān)鍵。
L4級自動駕駛公司的BUS模式,是通過過擬合模型來提升對固定路段內(nèi)的感知和決策能力,即為一段路打造私有模型。但通勤模式將落地萬千用戶,為每條用戶的通勤路線建立私有模型,進行過擬合訓(xùn)練顯然不現(xiàn)實。
自動駕駛量產(chǎn)玩家或許自己也有這樣的顧慮。盡管能解決80%的出行需求,但目前推出的通勤功能都是隨車附送,而非收費模式。
無論是算法還是工程專家都認(rèn)同,降低對高精地圖依賴的通勤模式,有利于降低成本,普及駕駛輔助,讓更多人“用上”。但能否“用好”,仍由車端感知和決策能力高低所決定,沒有捷徑可走。
編輯:黃飛
?








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論