 電子發(fā)燒友App
電子發(fā)燒友App


關(guān)于汽車電控系統(tǒng),它其實(shí)并不是新能源電動(dòng)汽車專有的,燃油車同樣具備,只不過新能源電動(dòng)汽車的電控系統(tǒng)更加的復(fù)雜,也更強(qiáng)大。
汽車電控系統(tǒng),就是汽車電子控制系統(tǒng),是由模塊控制的系統(tǒng)總稱,它由硬件和軟件構(gòu)成,電控其實(shí)就是車輛所有電子控制系統(tǒng)的軟件+硬件的總稱,我們可以將整個(gè)電控系統(tǒng)理解為車輛的神經(jīng)系統(tǒng),這個(gè)系統(tǒng)可以控制車輛的運(yùn)行能力,所以電控系統(tǒng)越強(qiáng)大,車輛的控制與行駛能力越出色。今天咱們就來聊聊新能源汽車的整車控制系統(tǒng)。
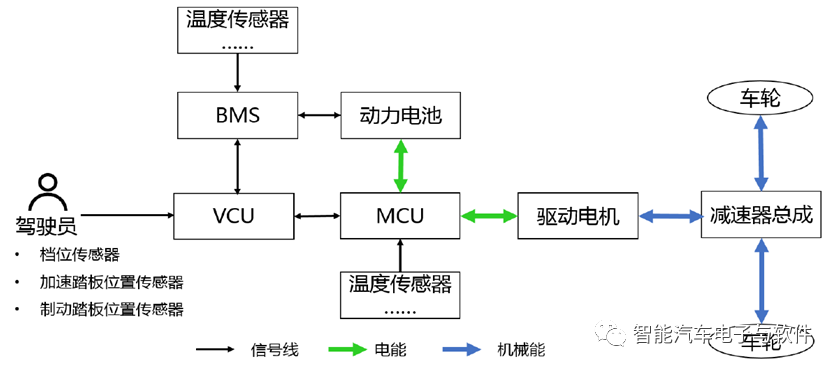
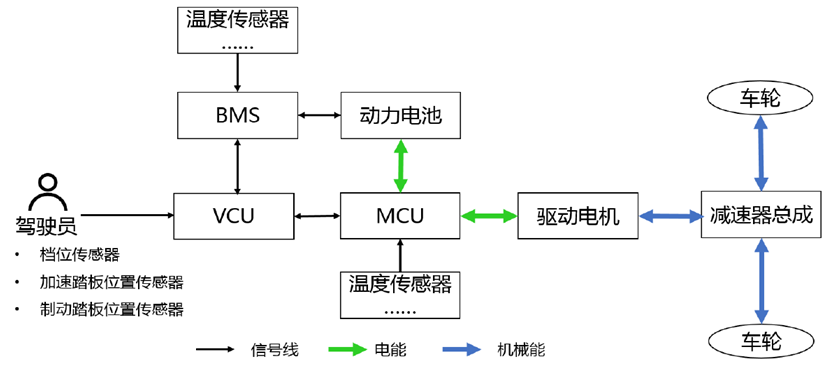
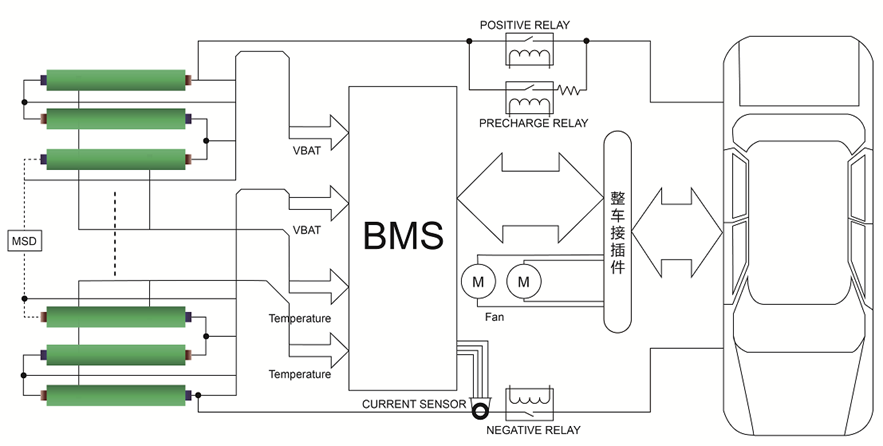
整車控制系統(tǒng)由加速踏板位置傳感器,制動(dòng)踏板位置傳感器,電子換擋器等輸入信號(hào)傳感器,整車控制器(VCU),電機(jī)控制器(MCU),電池管理系統(tǒng)(BMS)等控制模塊和驅(qū)動(dòng)電機(jī),動(dòng)力電池等執(zhí)行元件組成。
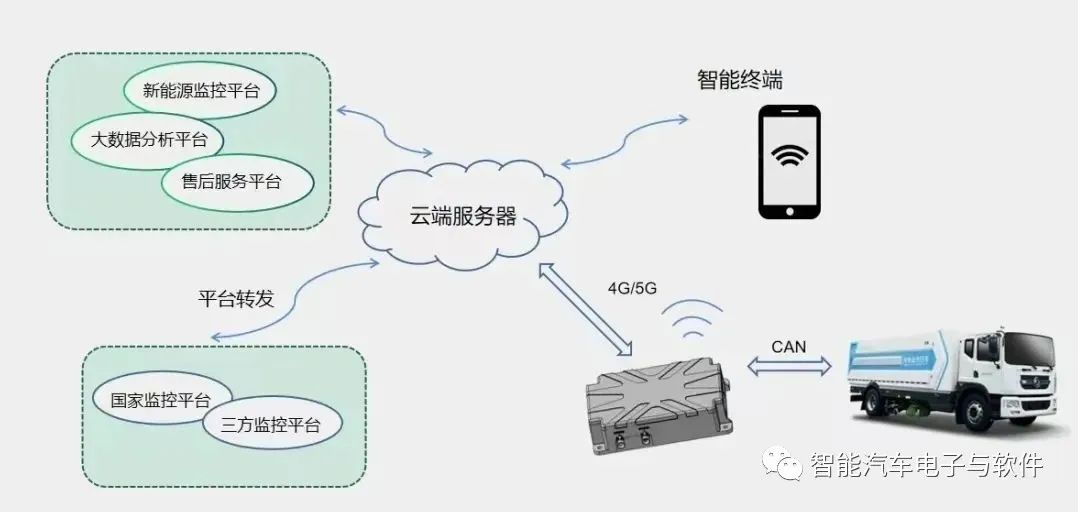
應(yīng)用圖
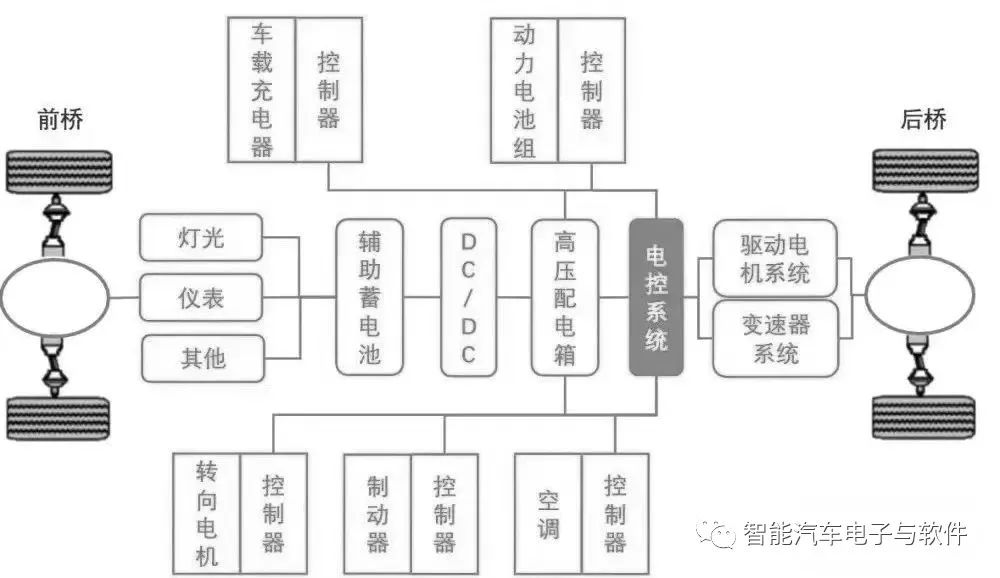
組成構(gòu)架圖
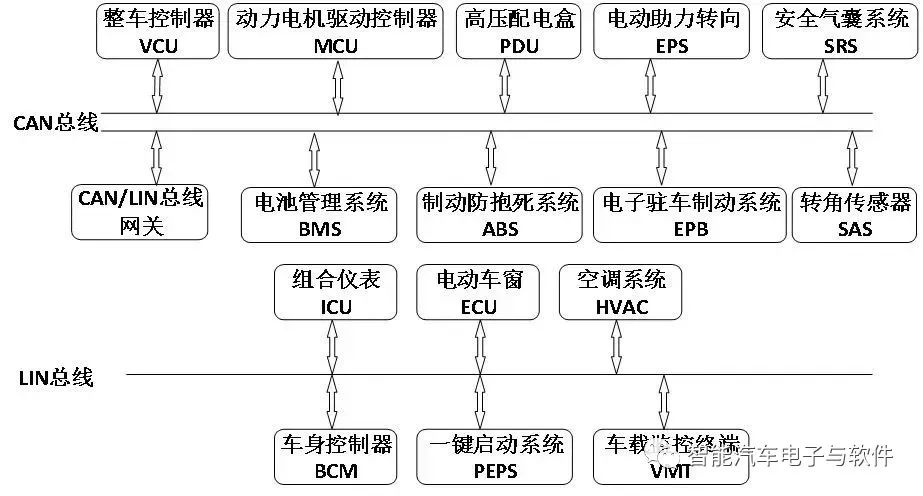
汽車上的這些控制器通過CAN網(wǎng)絡(luò)來通信。**CAN,全稱為“Controller Area Network”,即控制器局域網(wǎng),是國(guó)際上應(yīng)用最廣泛的現(xiàn)場(chǎng)總線之一。**最初,CAN被設(shè)計(jì)作為汽車環(huán)境中的微控制器通訊,在車載各電子控制裝置ECU之間交換信息,形成汽車電子控制網(wǎng)絡(luò)。比如:發(fā)動(dòng)機(jī)管理系統(tǒng)、變速箱控制器、儀表裝備、電子主干系統(tǒng)中,均嵌入CAN控制裝置。
整車控制系統(tǒng)的功能
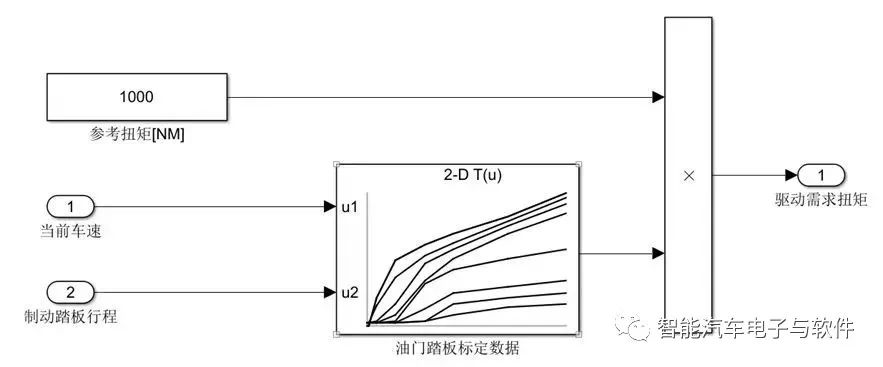
1.駕駛員駕駛意圖解析
主要是對(duì)駕駛員操作信息及控制命令進(jìn)行分析處理,也就是將駕駛員的油門信號(hào)和制動(dòng)信號(hào)根據(jù)某種規(guī)則,轉(zhuǎn)化成電機(jī)的需求轉(zhuǎn)矩命令 。因而驅(qū)動(dòng)電機(jī)對(duì)駕駛員操作的響應(yīng)性能完全取決于整車控制的油門解釋結(jié)果,直接影響駕駛員的控制效果和操作感覺。
2.整車驅(qū)動(dòng)控制
根據(jù)駕駛員對(duì)車輛的操縱輸入(加速踏板、制動(dòng)踏板以及選檔開關(guān))、車輛狀態(tài)、道路及環(huán)境狀況,經(jīng)分析和處理,向整車管理系統(tǒng)發(fā)出相應(yīng)的指令,控制電機(jī)的驅(qū)動(dòng)轉(zhuǎn)矩來驅(qū)動(dòng)車輛,以滿足駕駛員對(duì)車輛驅(qū)動(dòng)的動(dòng)力性要求;同時(shí)根據(jù)車輛狀態(tài),向整車管理系統(tǒng)發(fā)出相應(yīng)指令,保證安全性、舒適性。
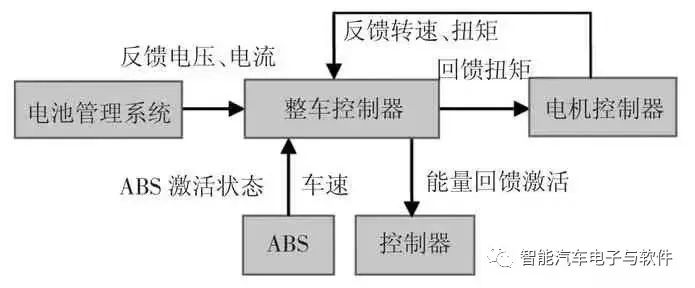
3制動(dòng)能量回饋控制
整車控制器根據(jù)加速踏板和制動(dòng)踏板的開度、車輛行駛狀態(tài)信息以及動(dòng)力電池的狀態(tài)信息(如SOC值)來判斷某一時(shí)刻能否進(jìn)行制動(dòng)能量回饋,在滿足安全性能、制動(dòng)性能以及駕駛員舒適性的前提下,回收部分能量。包括滑行制動(dòng)和剎車制動(dòng)過程中的電機(jī)制動(dòng)轉(zhuǎn)矩控制。
4.整車能量?jī)?yōu)化管理
通過對(duì)電動(dòng)汽車的電機(jī)驅(qū)動(dòng)系統(tǒng)、電池管理系統(tǒng)、傳動(dòng)系統(tǒng)以及其它車載能源動(dòng)力系統(tǒng)(如空調(diào)、電動(dòng)泵等)的協(xié)調(diào)和管理,提高整車能量利用效率,延長(zhǎng)續(xù)駛里程。
在純電動(dòng)汽車中,電池除了給驅(qū)動(dòng)電機(jī)供電以外,還要給其他電器供電。因此,為了獲得最大的續(xù)駛里程,整車控制器將負(fù)責(zé)整車的能量管理,以提高能量的利用率。在電池的SOC值比較低的時(shí)候,整車控制器將對(duì)其他電器發(fā)出指令,限制其他電器的輸出功率,或關(guān)閉部分輔助設(shè)備來增加續(xù)駛里程。
5.充電過程控制
與電池管理系統(tǒng)共同進(jìn)行充電過程中的充電功率控制,整車控制器接收到充電信號(hào)后,應(yīng)該禁止高壓系統(tǒng)上電,保證車輛在充電狀態(tài)下處于行駛鎖止?fàn)顟B(tài);并根據(jù)電池狀態(tài)信息限制充電功率,保護(hù)電池。
6.電控系統(tǒng)的上下電控制
1.高壓上電
點(diǎn)火鑰匙ON檔,BMS、MCU當(dāng)前狀態(tài)正常、且在之前一次上下電過程中整車無嚴(yán)重
故障
BMS、MCU初始化完成,VCU確認(rèn)狀態(tài)
2.閉合電池繼電器
閉合主繼電器
4.MCU高壓上電
5.如檔位在N檔,儀表顯示Ready燈點(diǎn)亮
2.下電順序
純電動(dòng)車下電只需點(diǎn)火鑰匙打到OFF檔,即可實(shí)現(xiàn)高壓、低壓電的正常下電
1.點(diǎn)火鑰匙到OFF檔,主繼電器斷開、MCU低壓下電
2.輔助系統(tǒng)停止工作,包括DC/DC、水泵、空調(diào)、暖風(fēng)
3.BMS新開電池繼電器
4.整車控制器下電 (VCU) 整車控制器在下電前會(huì)存儲(chǔ)行車過程中發(fā)生的故障信息
7.電動(dòng)化輔助系統(tǒng)管理
電動(dòng)化輔助系統(tǒng)包括電動(dòng)空調(diào)、電制動(dòng)、電動(dòng)助力轉(zhuǎn)向。整車控制器應(yīng)該根據(jù)動(dòng)力電池以及低壓電池狀態(tài),對(duì) DC/DC、電動(dòng)化輔助系統(tǒng)進(jìn)行監(jiān)控。
8.車輛狀態(tài)的實(shí)時(shí)監(jiān)測(cè)和顯示
整車控制器應(yīng)該對(duì)車輛的狀態(tài)進(jìn)行實(shí)時(shí)檢測(cè),并且將各個(gè)子系統(tǒng)的信息發(fā)送給車載信息顯示系統(tǒng),其過程是通過傳感器和 CAN總線,檢測(cè)車輛狀態(tài)及其動(dòng)力系統(tǒng)及相關(guān)電器附件相關(guān)各子系統(tǒng)狀態(tài)信息,驅(qū)動(dòng)顯示儀表,將狀態(tài)信息和故障診斷信息通過數(shù)字儀表顯示出來。
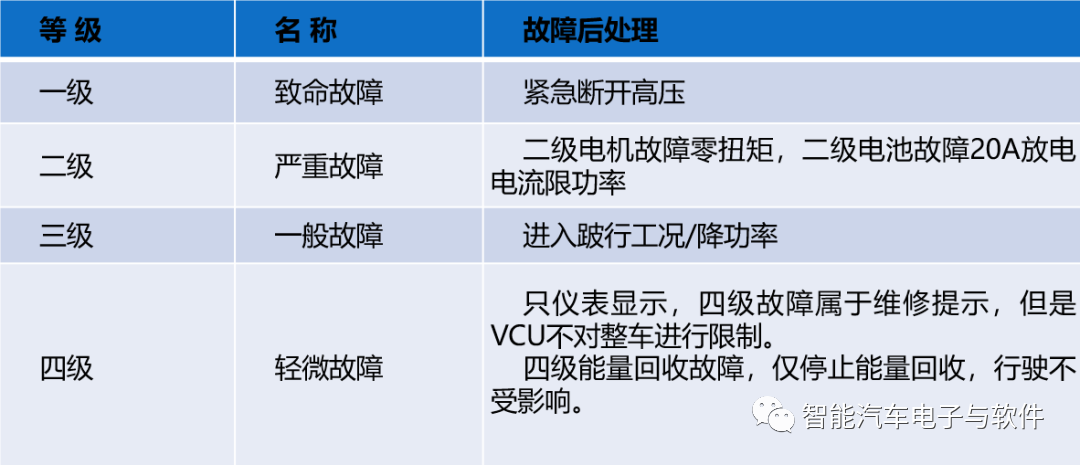
9.故障診斷與處理
連續(xù)監(jiān)視整車電控系統(tǒng),進(jìn)行故障診斷,并及時(shí)進(jìn)行相應(yīng)安全保護(hù)處理。根據(jù)傳感器的輸入及其它通過CAN總線通訊到的電機(jī)、電池、充電機(jī)等信息,對(duì)各種故障進(jìn)行判斷、等級(jí)分類、報(bào)警顯示;存儲(chǔ)故障碼,供維修時(shí)查看。故障指示燈只是出故障類型和部分故障碼。在行車過程中,根據(jù)故障內(nèi)容作故障診斷與處理。
整車的故障等級(jí)進(jìn)行4級(jí)劃分:
10.遠(yuǎn)程控制
(1)遠(yuǎn)程查詢功能
用戶可以通過手機(jī)APP實(shí)時(shí)查詢車輛狀態(tài),實(shí)時(shí)了解車輛的狀況包括:剩余SOC值、續(xù)駛里程等。
(2)遠(yuǎn)程空調(diào)控制
無論是在炎熱的夏季還是在寒冷的冬季,用戶在出門前就可以通過手機(jī)指令實(shí)現(xiàn)遠(yuǎn)程的空調(diào)制冷、空調(diào)暖風(fēng)和除霜功能。
(3) 遠(yuǎn)程充電控制
用戶離開車輛時(shí)將充電槍插入充電樁,并不進(jìn)行立即充電,可以利用電價(jià)波谷并在家里實(shí)時(shí)查詢SOC值,需要充電時(shí)通過手機(jī)APP發(fā)送遠(yuǎn)程充電指令,進(jìn)行充電操作
11.整車CAN總線網(wǎng)關(guān)及網(wǎng)絡(luò)化管理
電動(dòng)轎車CAN總線系統(tǒng)由中央控制器、電池管理系統(tǒng)、電機(jī)控制系統(tǒng)、制動(dòng)控制系統(tǒng)、儀表控制系統(tǒng)組成。各個(gè)控制器之間通過CAN總線進(jìn)行通信,以實(shí)現(xiàn)傳感器測(cè)量數(shù)據(jù)的共享、控制指令的發(fā)送和接收等,并使各自的控制性能都有所提高,從而提高系統(tǒng)的控制性能。它們之間的通信與信息類型為信息類和命令類。信息類主要是發(fā)送一些信息,如傳感器信號(hào)、診斷信息、系統(tǒng)的狀態(tài)。命令類則主要是發(fā)送給其他執(zhí)行器的命令。
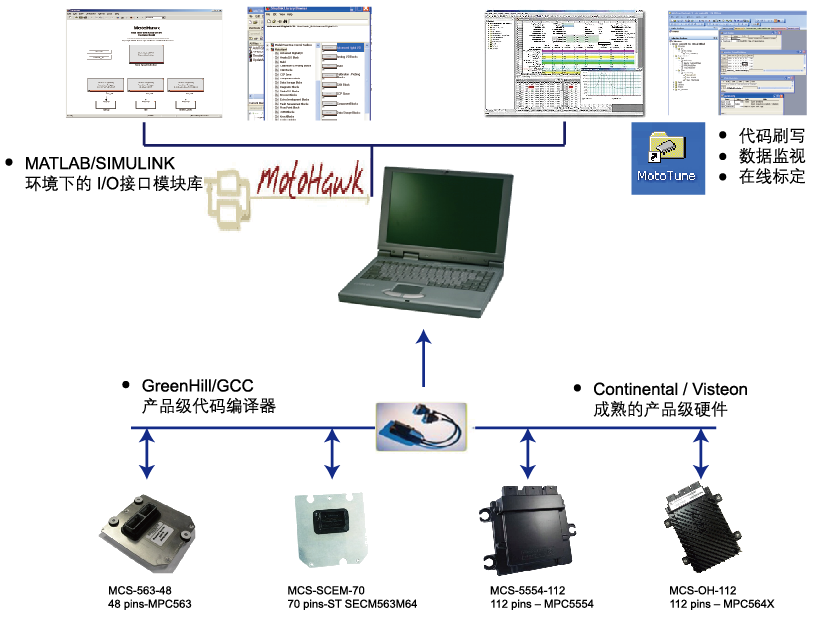
12.基于CCP的在線匹配標(biāo)定
基于CCP的在線匹配標(biāo)定協(xié)議采用主-從式通信方式,主設(shè)備通過CAN總線與多臺(tái)從設(shè)備相連接,主設(shè)備是測(cè)量標(biāo)定系統(tǒng),從設(shè)備是需要標(biāo)定的ECU,主設(shè)備首先與其中一個(gè)從設(shè)備建立邏輯鏈接。建立邏輯連接后,主、從設(shè)備之間所有的數(shù)據(jù)傳遞均由主機(jī)控制,從設(shè)備執(zhí)行主設(shè)備命令后返回包含命令響應(yīng)值或錯(cuò)誤代碼等信息的報(bào)文,同時(shí)從設(shè)備可以根據(jù)主設(shè)備通過控制命令所設(shè)置的列表信息,來定時(shí)地向主設(shè)備傳送變量信息,數(shù)據(jù)的傳遞是由主設(shè)備初始化并且由從設(shè)備來執(zhí)行的,并且是由固定的循環(huán)采樣頻率或者事件觸發(fā)的。
13.DC/DC控制與EPS控制
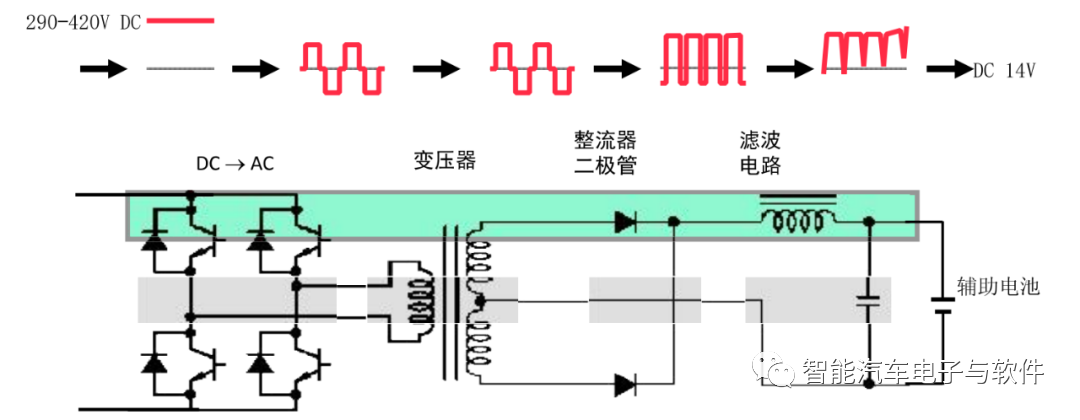
(1) DC/DC控制
DC/DC變換器即是把直流電壓變換為另一數(shù)值的直流電壓,是開關(guān)電源技術(shù)的一個(gè)分支。它是由半導(dǎo)體功率器件作為的開關(guān)管、二極管、電感、電容、負(fù)載和直流電源構(gòu)成的,通過使帶濾波器的負(fù)載電路和直流電壓時(shí)而接通、時(shí)而關(guān)斷,使得負(fù)載上得到另一個(gè)直流電壓。
(2) EPS控制
汽車電動(dòng)助力式轉(zhuǎn)向系統(tǒng)利用電動(dòng)機(jī)產(chǎn)生的轉(zhuǎn)矩,經(jīng)過轉(zhuǎn)向系統(tǒng)減速及傳遞機(jī)構(gòu)轉(zhuǎn)化后協(xié)助駕車者進(jìn)行動(dòng)力轉(zhuǎn)向。不同車的EPS結(jié)構(gòu)部件盡管不一樣,但基本原理是一致的。在檢測(cè)到有效汽車點(diǎn)火信號(hào)后,當(dāng)轉(zhuǎn)向軸轉(zhuǎn)動(dòng)時(shí),轉(zhuǎn)矩或轉(zhuǎn)角傳感器將檢測(cè)到的轉(zhuǎn)矩和轉(zhuǎn)角信號(hào)輸出至電子控制單元ECU
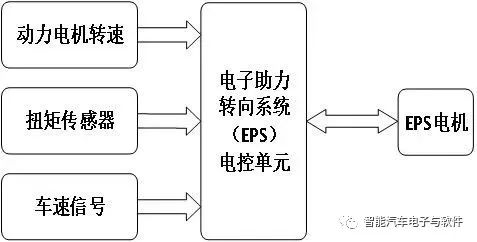
ECU根據(jù)轉(zhuǎn)矩、轉(zhuǎn)角信號(hào),汽車速度、軸重負(fù)載信號(hào)等進(jìn)行分析和計(jì)算,得出助力電動(dòng)機(jī)的轉(zhuǎn)向和目標(biāo)助力電流的大小,從而實(shí)現(xiàn)助力轉(zhuǎn)向控制。
14.換擋控制功能
換擋控制功能關(guān)系著駕駛員的駕駛安全,正確理解駕駛員意圖,以及識(shí)別車輛合理的檔位,在基于模型開發(fā)的檔位管理模塊中得到很好的優(yōu)化。能在出現(xiàn)故障時(shí)作出相應(yīng)處理保證整車安全,在駕駛員出現(xiàn)檔位誤操作時(shí)通過儀表等提示駕駛員,使駕駛員能迅速做出糾正。
15.防溜車功能控制
純電動(dòng)汽車在坡上起步時(shí),駕駛員從松開制動(dòng)踏板到踩油門踏板過程中,會(huì)出現(xiàn)整車向后溜車的現(xiàn)象。在坡上行駛過程中,如果駕駛員踩油門踏板的深度不夠,整車會(huì)出現(xiàn)車速逐漸降到0然后向后溜車現(xiàn)象。因此為了防止汽車在坡上起步和運(yùn)行時(shí)向后溜車現(xiàn)象,在整車控制策略中增加了防溜車功能。
防溜車功能可以保證整車在坡上起步時(shí),向后溜車小于10CM;在整車坡上運(yùn)行過程中如果動(dòng)力不足時(shí),整車車速會(huì)慢慢降到0,然后保持0車速,不再向后溜車。
來源:EDC電驅(qū)未來 ? ?
審核編輯:湯梓紅














 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論