 電子發燒友App
電子發燒友App


為了解決現有被動安全相關標準制約智能汽車新技術發展的問題,根據國際標準組織和美國標準機構對智能汽車被動安全相關標準的修訂工作及內容,制定了中國智能汽車被動安全標準評價體系建設方案和中國智能汽車被動安全標準發展路線圖,并以一項國家強制標準進行舉例說明以期為中國被動安全標準的適用性制定和修改提供必要的支撐。
1 前言
伴隨著人工智能以及新一代信息通信技術革命浪潮,汽車作為新技術集成應用的最佳載體之一,正在加速向智能化轉型,智能汽車已經成為國際汽車產業發展的戰略方向和競爭焦點[1-4]。
為了避免現有標準制約新技術的發展,本文結合國際標準組織和美國標準機構對智能汽車被動安全相關標準的修訂工作原則和方法,開展了中國智能汽車被動安全標準評價體系建設方案和中國智能汽車被動安全標準發展路線的研究工作,并針對被動安全相關標準的修訂進行了初步探究。
2 國外智能汽車被動安全相關標準研究進展
2.1 美國NHTSA 針對智能汽車被動安全相關標準的修訂原則和范圍
美國自2016 年開始對美國現有被動安全標準進行了系統地掃描,以便應對智能汽車技術的發展帶來的沖突和影響[5]。美國高速公路安全管理局(National Highway Traffic Safety Administration,NHTSA)在2018年9 月28 日發布了智能汽車駕駛系統的可測試案例和場景框架[6],在2019 年5 月28 日發布了預先通知建議規則(Advance Notice of Proposed Rule Making,ANPRM),用來解決未來智能汽車的開發對碰撞安全性能產生影響的問題[7-8]。為解決新型車輛設計的問題(尤其是非乘用車,或是對駕駛員位置和操控形式進行重大修改的車輛),NHTSA在2020年3月30日發布了一項規則制定提案,修改了幾項耐撞性法規,以明確無駕駛員控制的機動車輛的安全標準[9]。2021年1月13日,NHTSA推出了最終版提案,消除了重大的、不必要的法規障礙,為未來智能汽車的生產、銷售和使用鋪平道路[10-11]。2022年3月10日,NHT?SA發布了最終規則,該規則更新了乘員保護聯邦機動車輛安全標準,以確保自動駕駛汽車乘員的安全。
2.1.1 NHTSA針對智能汽車被動安全相關標準的修訂原則
第一,要保持智能汽車和傳統汽車具有相同的乘員保護性能;第二,去掉針對智能汽車開發可能產生的不需要進行監管的條文要求;第三,修訂后的要求有利于配備智能汽車技術的車輛,且不改變對非智能汽車的要求;最后,根據美國運輸部指南《為未來運輸作準備:自動車輛3.0》中概述的原則,修訂后的要求以保持技術中立,即既不傾向主動安全也不傾向被動安全的方式對美國汽車安全技術法規(Federal Motor Vehicle Safety Stan?dard,FMVSS)進行修改,并以更能反映某些創新內飾的方式對FMVSS進行修改。
2.1.2 NHTSA針對智能汽車被動安全相關標準修訂的前提條件
a.假定智能汽車座椅布局與傳統車輛相同,其他形式的座椅布局需要進一步的研究。
b.針對只載貨(無/少乘客)的車輛修訂了碰撞安全性的要求,但未考慮其相容性的問題。
c.修訂僅限于200 系列FMVSS,不適用于300 系列標準。不修改與信號裝置和警告相關的要求,因為該領域的影響超出了200 系列標準,并且是NHTSA 繼續研究的主題。但安全氣囊抑制信號裝置的修改計劃在未來單獨發布通知。
2.1.3 NHTSA針對智能汽車被動安全相關標準修訂的范圍
針對無駕駛員座位,但是有多個前排乘員座位的情況進行了修訂。針對前排安全氣囊指示燈和抑制裝置,建議分開顯示,并且在每一個前排乘坐位置乘坐時均可見。
針對中型客車(整備質量為4 536~11 793 kg)和校車(整備質量大于4 536 kg)安全帶要求進行了修訂,針對智能汽車無駕駛員的情況,建議車輛前排座椅滿足與駕駛員座椅相同的要求。
當車輛沒有轉向盤和轉向裝置時,FMVSS 203 和FMVSS 204 將不適用于對智能汽車的評價。建議不將乘員保護標準應用于僅用于載貨的車輛(“無乘員”車輛),這種要求可通過修改適用范圍來實現,以表明該標準僅適用于帶有駕駛員的“卡車”。
NHTSA 對FMVSS 201、FMVSS 205、FMVSS 206、FMVSS 207、FMVSS 208、FMVSS 214、FMVSS 216 和FMVSS 226進行了修訂。
2.2 WP.29 被動安全性工作組針對智能汽車被動安全相關標準的修訂范圍
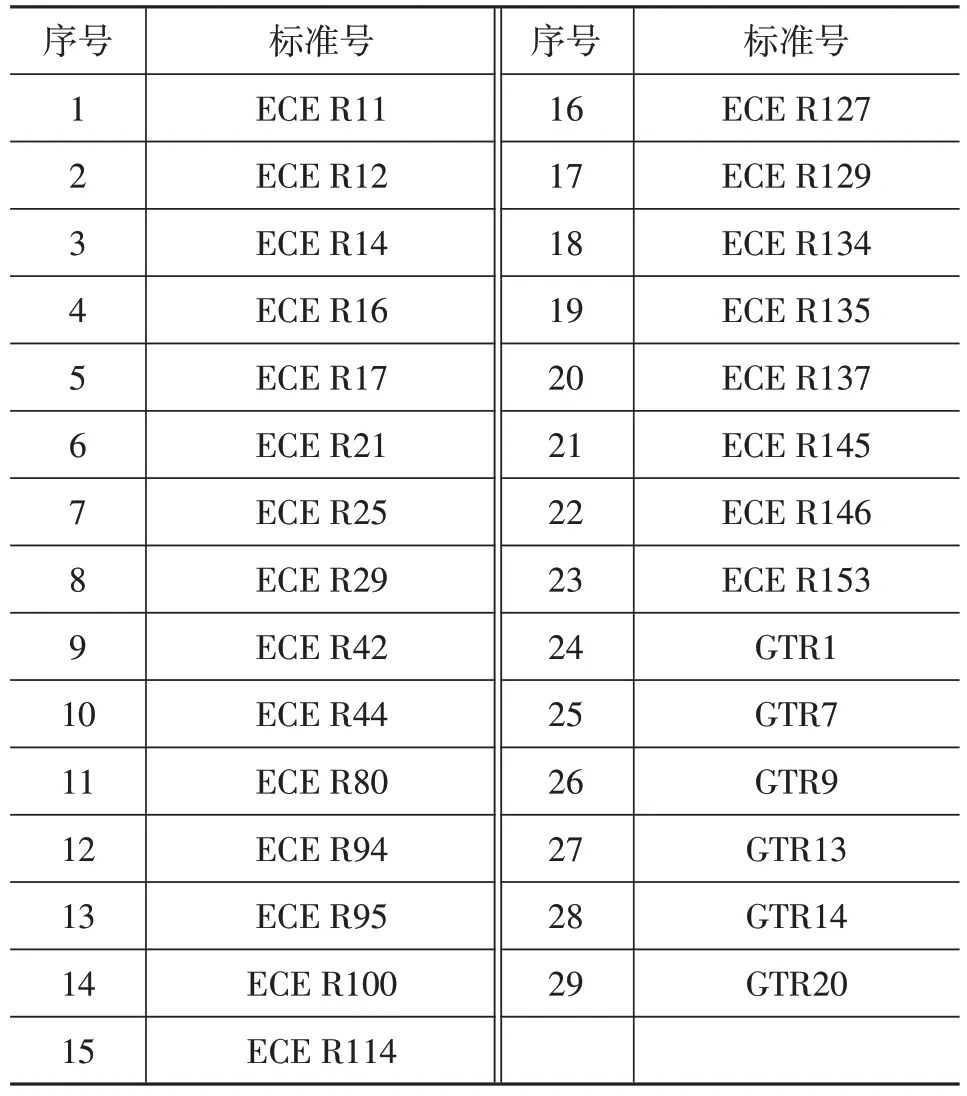
在2022年5月10日世界車輛法規協調論壇(World Forum for the Harmonization of Vehicle Regulations,WP.29)的被動安全性工作組(The Working Party on Passive Safety,GRSP)第71屆會議中成立了被動安全標準與智能汽車相關功能協調性研究工作組,旨在研究目前被動安全相關聯合國歐洲經濟委員會汽車法規(the regulation of Economic Commission of Europe,ECE)和全球技術法規(Global Technical Regulation,GTR)標準中與未來智能汽車技術的兼容問題,以便推動智能汽車被動安全性能的合理發展[12]。
目前該項工作處于初期階段,涉及的主要相關ECE和GTR被動安全國際標準清單如表1所示。
表1 主要相關的ECE被動安全國際標準
3 國內智能汽車被動安全相關標準研究進展
3.1 智能汽車標準發展與被動安全國家強制標準發展現狀
近年來,中國智能汽車產量迅速增長,主動安全和被動安全相結合的技術也有了一定的發展。汽車安全技術的規劃和發展催生了主動安全和被動安全標準的制定和升級[13-15]。
智能汽車標準主要由全國汽車標準化技術委員會(National Technical Committee of Auto Standardization,SAC/TC114)負責組織制定,標準劃分為基礎、通用規范、產品與技術應用、資源管理與信息服務及相關標準。到目前為止已發布智能汽車標準12項,另有26項標準處于研究中、立項或待發布狀態。標準主要依據智能車輛的功能安全、信息安全、網絡安全和人機交互方面進行技術功能和性能的約定,并未對車輛乘員的保護性能進行要求。
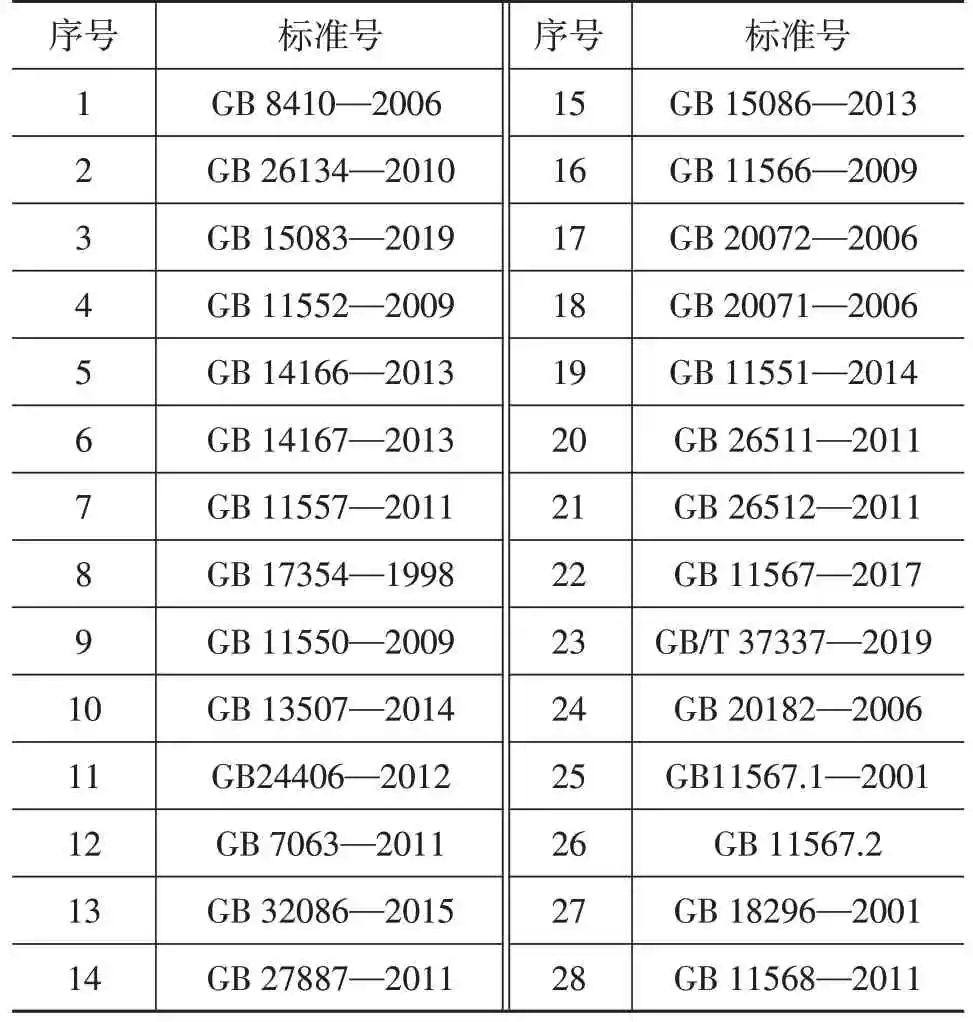
汽車被動安全標準主要由全國汽車標準化技術委員會汽車碰撞試驗及碰撞防護分技術委員會SAC/TC114/SC33負責組織制定。目前已批準發布汽車強制性國家標準96 項,其中汽車被動安全標準28 項,占比29%,如表2 所示。標準主要集中在對整車及其部件在碰撞過程中的性能要求,以及對車內乘員的保護要求,并未針對智能汽車新功能和新部件對乘員傷害產生的影響進行規定。
表2 被動安全國家強制標準
智能車輛主動安全功能和部件(如自動緊急制動功能)完全改變了車輛乘員在發生碰撞時的運動姿態和位置,傳統的被動安全系統將無法正確地將乘員傷害最小化;另外,在未來無駕駛員或車內乘員乘坐姿態變化的情況下,現行標準內容將存在技術沖突和產品性能要求沖突的問題。為了避免現行國家標準內容限制先進技術的發展進步,有必要對現行國家標準進行系統性的技術內容掃描,提出對應的修改建議,以便促進汽車行業合理有序發展。
3.2 中國智能汽車被動安全標準評價體系建設方案
結合目前智能汽車技術發展趨勢和相關國家、國際標準組織對智能汽車被動安全相關標準的修訂過程,依據標準內容和修訂方向,在保障有利于配備智能汽車技術的車輛且不改變非智能汽車的要求的基礎上,初步建立了中國智能汽車被動安全標準體系建設方案。
3.2.1 體系建設前提
a.智能商用車輛無乘員;
b.智能乘用車無駕駛員;
c.智能汽車無轉向盤(或存在可收縮式轉向盤);
d.存在新內飾的變化及座椅布置位置和形式的變化。
3.2.2 體系建設原則
在未來實際交通環境中必然存在傳統車輛和智能汽車,2 種類型車輛必須保證具有相同的乘員保護性能。修訂的內容應有助于智能汽車技術的發展,以及可能產生的內飾結構或布置等新的變化,不能限制相關領域技術創新和技術進步。修訂內容應有利于智能汽車的發展,但不能改變對傳統車輛原有的要求。
3.2.3 體系建設內容
針對智能汽車和傳統車輛并存的情況,需要對相應標準內容進行修訂:
a.針對車輛類型是否是智能汽車,對標準適用范圍進行修訂;
b.針對有無駕駛員、轉向控制機構和新的內飾布置及變化,對術語和相應的試驗實施過程進行修訂;
c.針對安全氣囊和安全帶在前排位置的變化,需要對座椅布置要求和乘員保護要求進行修訂;
d.針對乘員位置的變化,需要對安全氣囊和安全帶警告裝置要求進行修訂;
e.針對新內飾和座椅布置的變化,需要對相應部件和整車碰撞標準內容進行適應性修訂;
f.針對智能汽車主動安全裝置起作用的情況下,需要對相關標準試驗方法和過程進行修訂。
3.3 中國智能汽車被動安全標準發展路線圖
根據智能汽車發展規劃,2025 年高度自動駕駛(Highly Autonomous driving,HA)技術開始進入市場,2030 年實現HA 級智能網聯汽車在高速公路廣泛應用,在部分城市道路規模化應用,2035 年以后HA 級、完全自動駕駛(Fully Autonomous driving,FA)級智能網聯車輛具備與其他交通參與者間的網聯協同決策與控制能力,各類高度自動駕駛車輛廣泛運行于中國廣大地區。
智能汽車被動安全標準體系發展總體路線如圖1所示,在智能汽車可實現技術的基礎上,兼顧了乘用車、貨運車輛和客運車輛的智能發展需求,構建了整車和部件方向的技術架構,主要涵蓋了智能汽車主動安全裝置起作用條件下整車碰撞試驗技術、新內飾新姿態下乘員保護評價技術和新型碰撞模式下部件碰撞試驗技術等重點研究方向。
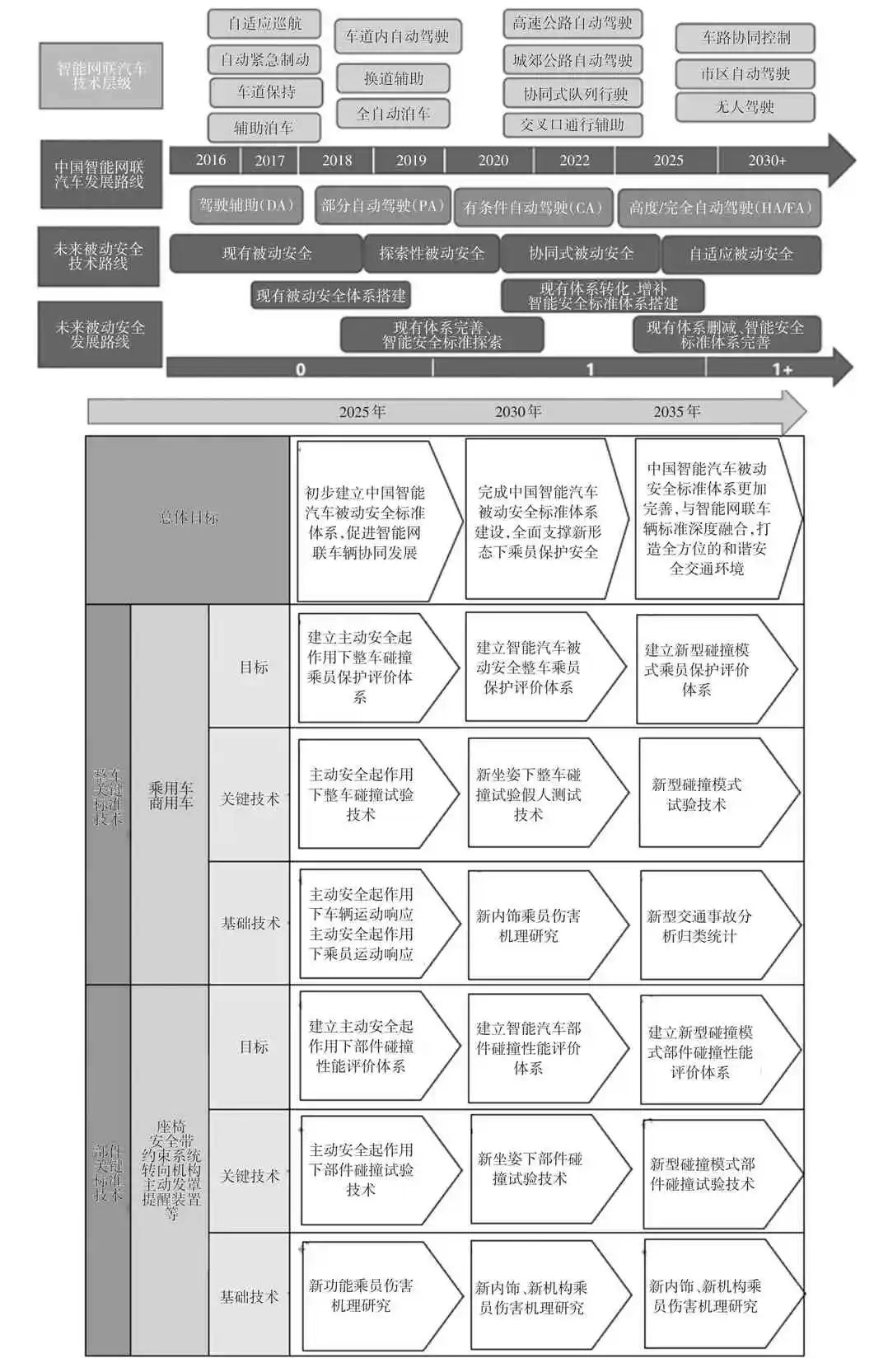
圖1 智能汽車被動安全標準體系發展總體路線圖
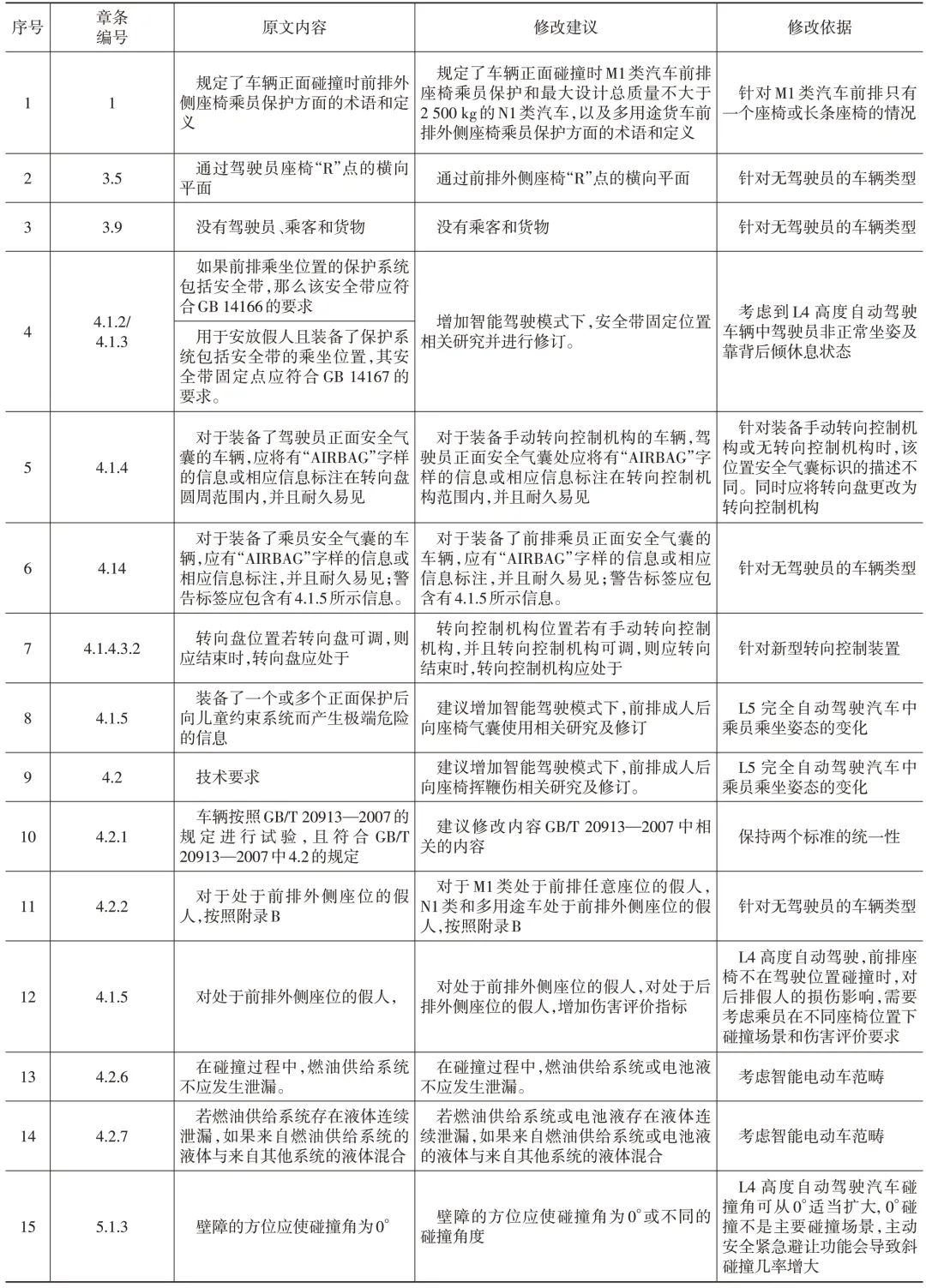
3.4 中國被動安全強制標準分析案例
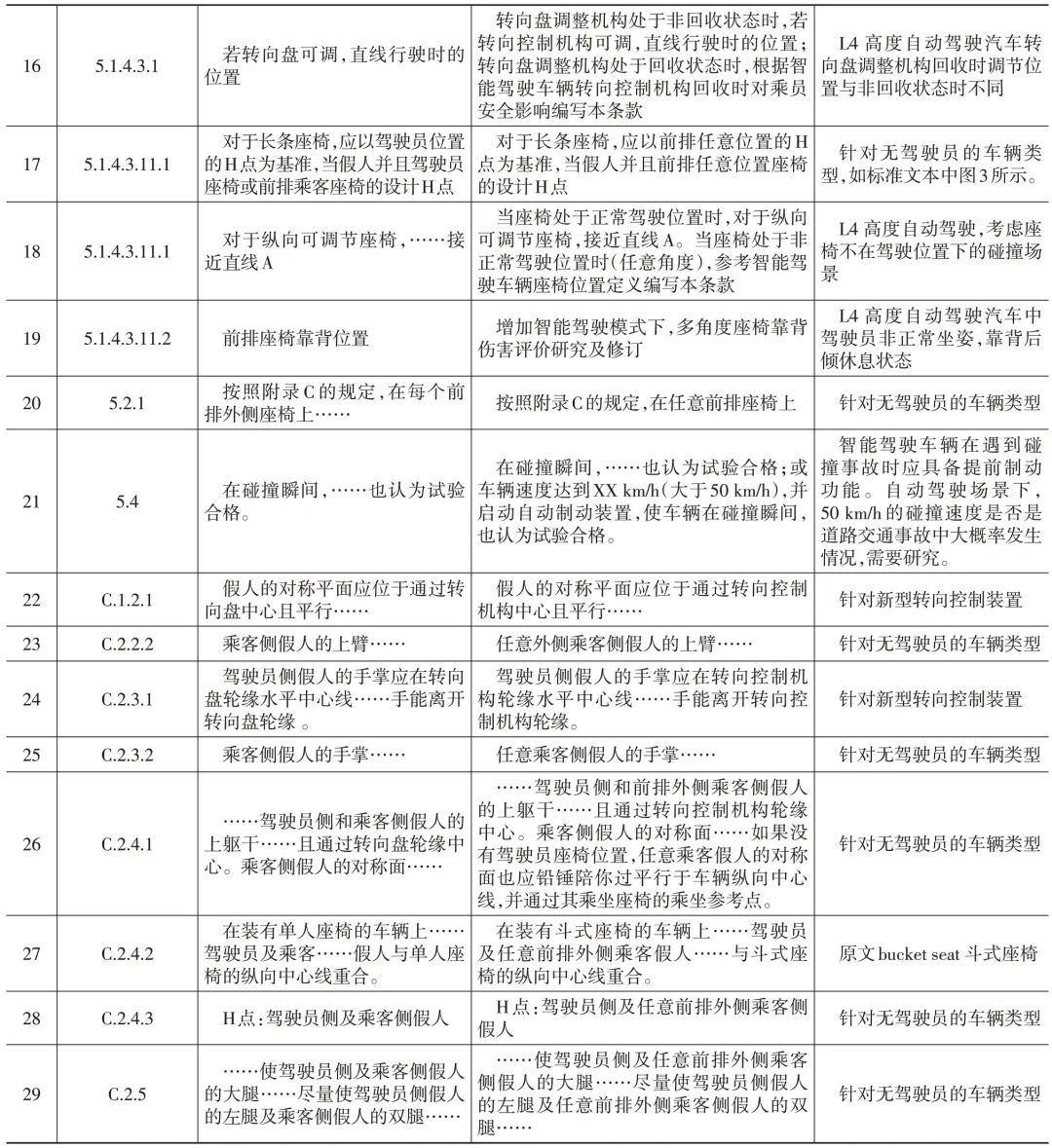
結合智能汽車發展各階段、安全場景、可能的未來事故場景等方面,開展對應標準領域技術發展趨勢分析;同步梳理標準內容,開展標準內容的適用性分析。由此確定標準是否符合智能汽車發展趨勢,是否需要廢止、修訂、加強、新增等。以GB 11551—2014《汽車正面碰撞的乘員保護》為例,標準建議修訂內容如表3所示[16]。
表3 主要相關的中國被動安全國家強制標準
?
4 結束語
本文根據中國智能汽車標準和中國被動安全國家強制性標準的發展現狀,分析了各自標準的關注焦點。智能汽車標準主要針對車輛的功能安全、信息安全、網絡安全和人機交互方面進行技術功能和性能的約定,并未對車輛乘員的保護效果進行性能要求;而被動安全國家強制標準主要集中在車輛及其部件在碰撞過程中的性能要求,以及對車內乘員的保護要求,并未對智能汽車新功能和新部件對乘員傷害產生的影響進行性能要求。為了促進新技術的發展和真正實現乘員傷害的最小化,本文針對未來智能車輛被動安全相關標準的制定和修訂工作進行了初步探索,結合國際標準組織和美國標準機構對智能汽車被動安全相關標準的修訂工作原則和方法,提出了中國智能汽車被動安全標準評價體系建設方案和中國智能汽車被動安全標準發展路線圖。
審核編輯:黃飛
?













 工商網監
工商網監
評論