 電子發燒友App
電子發燒友App


? ? 特斯拉引領了汽車“四化”的浪潮,這背后也帶動了我國汽車產業鏈的上下游。中信證券研究部TMT和汽車團隊聯手多家公司和機構耗時兩個月對特斯拉Model3進行了完整的拆解,并發布了報告。作為電動汽車市場具有代表性的車型,這份報告對Model3的E/E架構、三電、熱管理、車身等進行了深度解析。 ? 以下內容節選自《從拆解 Model3 看智能電動汽車發展趨勢》報告中域控制器部分章節。
域控制器?軟件定義汽車,迭代決定智能?
汽車的智能化的大方向已經成為了產業共識和市場共識。比如說 2008 年安卓 1.0 發布之初,使用體驗是比較一般的,經過不斷的數據收集、用戶反饋和持續迭代,最終交互和用戶體驗越來越好,逐步向我們理想中的“智能終端”逼近。 ? ? ? ? 顯而易見,汽車如果要能像手機一樣持續根據數據和用戶反饋進行軟件迭代,現有的E/E 架構勢必然是要進行大的變革的。軟件和硬件必須解耦,算力必須從分布走向集中,特斯拉的 Model3 率先由分布式架構轉向了分域的集中式架構,這是其智能化水平遙遙領先于許多車廠的主要原因,我們接下來就對特斯拉的車身域、座艙域、駕駛域進行詳細的解讀。
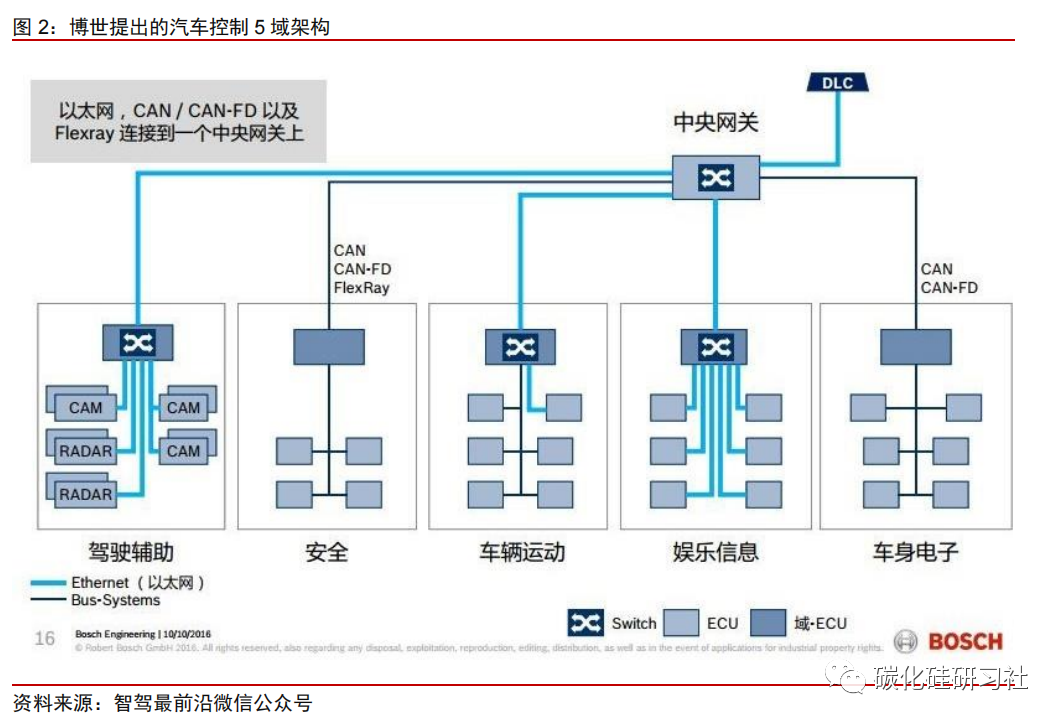
? 車身域:按位置而非功能進行分區,徹底實現軟件定義車身 ? 同樣是域控制器,特斯拉的域控制器思路始終是更為領先的。舉例來說,作為傳統汽車供應鏈中最核心的供應商之一,博世是最早提出域控制器概念的企業之一。但博世的思路仍然受到傳統的模塊化電子架構影響,其在 2016 年提出了按照功能分區的五域架構,將整車的 ECU 整合為駕駛輔助、安全、車輛運動、娛樂信息、車身電子 5 個域,不同域之間通過域控制器和網關進行連接。在當時看來,這一方案已經能夠大大減少 ECU 數量,然而用今天的眼光來看,每個域內部仍然需要較為復雜的線束連接,整車線束復雜度仍然較高。
? 與博世形成對比,特斯拉 model 3 在 2016 年發布,2017 年量產上市,與博世的報告幾乎處于同一時期。然而,model 3 的域控制器架構核心直接從功能變成了位置,3 個車身控制器就集中體現了特斯拉造車的新思路。按照特斯拉的思路,每個控制器應該負責控制其附近的元器件,而非整車中的所有同類元器件,這樣才能最大化減少車身布線復雜度,充分發揮當今芯片的通用性和高性能,降低汽車開發和制造成本。所以特斯拉的三個車身域控制器分別分布在前車身、左前門和右前門前,實現就近控制。這樣的好處是可以降低布線的復雜度,但是也要求三個車身域要實現徹底的軟硬件解耦,對廠商的軟件能力的要求大大提高。
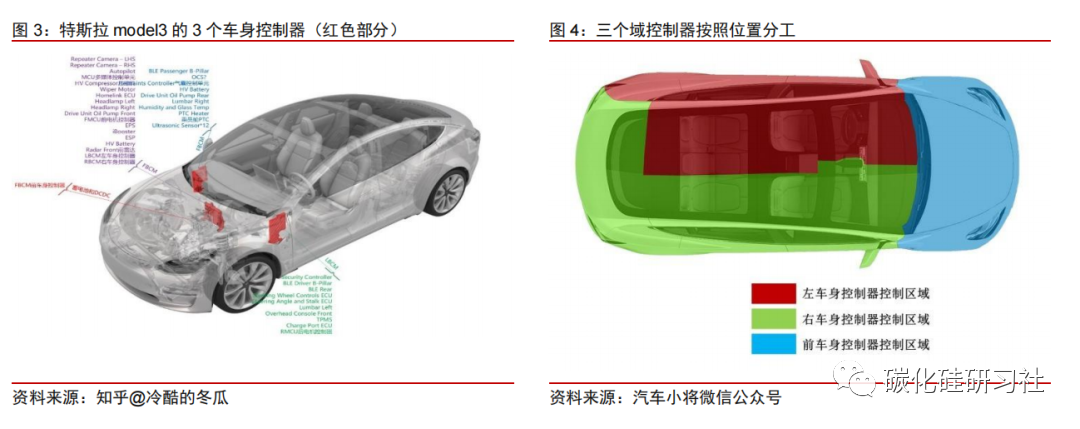
? 以下分別介紹三個車身控制器的情況,車身域分為前車身域、左車身域、右車身域,其在 Model3 車身上的位置如下圖所示。 ?
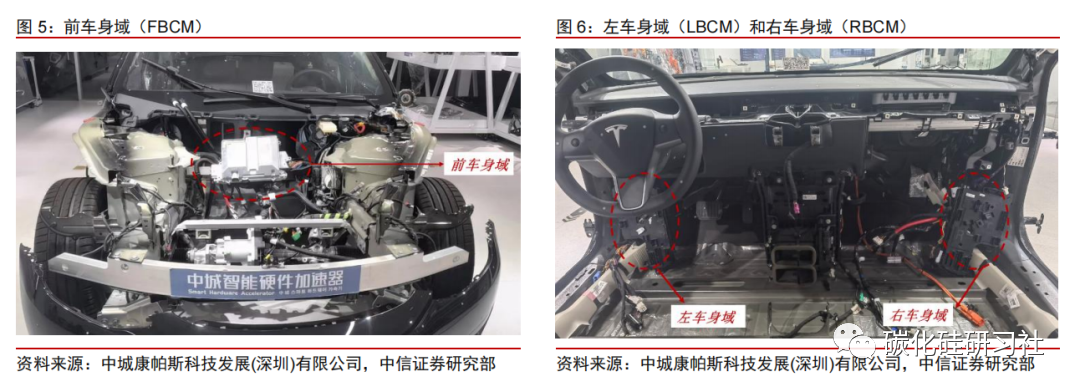
? 前車身域控制器的位置在前艙,這個位置理論上來說遇到的碰撞概率要更高,因此采用鋁合金的保護外殼,而左右車身域控制器由于在乘用艙內,遇到外界碰撞的概率較低,保護外殼均采用塑料結構,如下圖所示。 ?

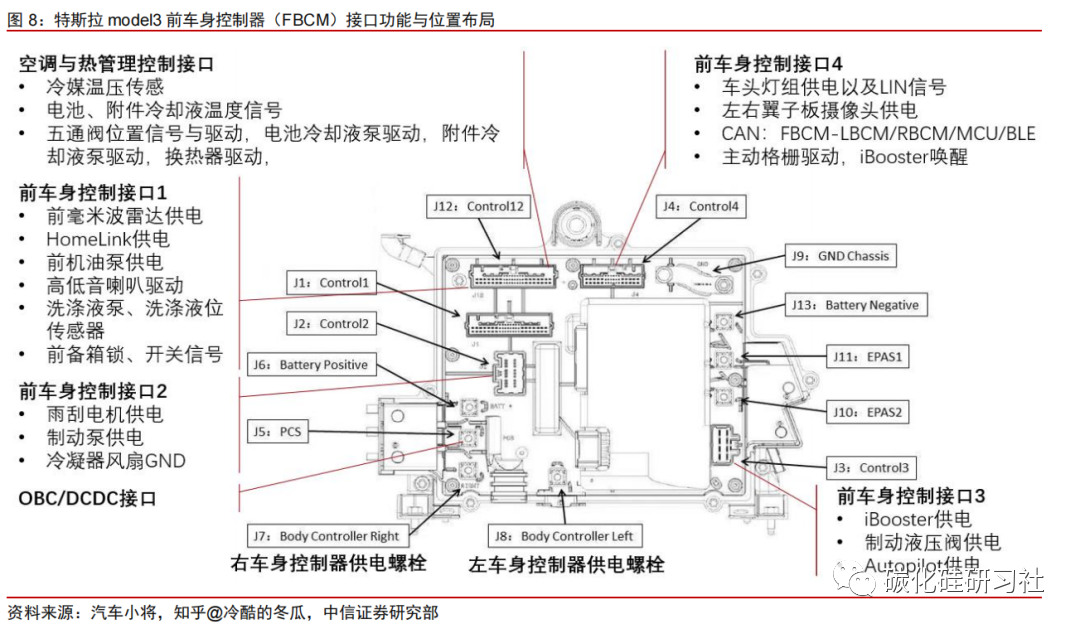
? 前車身控制器:全車電子電氣配電單元以及核心安全 ECU 連接 ? 前車身控制器位于前艙中,主要負責的功能是前車體元件控制以及主要的配電工作。該控制器離蓄電池比較近,方便取電。其主要負責三類電子電氣的配電和控制: ?
1、安全相關:i-booster、ESP 車身穩定系統、EPS 助力轉向、前向毫米波雷達;
2、熱管理相關:如冷卻液泵、五通閥、換熱器、冷媒溫度壓力傳感器等;
3、前車身其它功能:車頭燈、機油泵、雨刮等。除此之外,它還給左右車身控制器供電,這一功能十分重要,因為左右車身控制器隨后還將用這兩個接口中的能量來驅動各自控制的車身零部件。
? 將其拆開來看,具體功能實現方面,需要諸多芯片和電子元件來配合完成。核心的芯片主要完成控制和配電兩方面的工作。 ? 先說控制部分,主要由一顆意法半導體的 MCU 來執行(圖中紅框)。此外,由于涉及到冷卻液泵、制動液液壓閥等各類電機控制,所以板上搭載有安森美的直流電機驅動芯片(圖中橙色框 M0、M1、M2),這類芯片通常搭配一定數量的大功率 MOSFET 即可驅動電機。 ? 配電功能方面,一方面需要實時監測各部件中電流的大小,另一方面也需要根據監測的結果對電流通斷和電流大小進行控制。電流監測方面,AMS 的雙 ADC 數據采集芯片和電流傳感器配套芯片(黃色框 AMS 中的芯片)可以起到重要作用。而要控制電流的狀態,一方面是通過 MOSFET 的開關,另一方面也可以通過 HSD 芯片(High Side Driver,高邊開關),這種芯片可以控制從電源正極流出的電流通斷。 ?
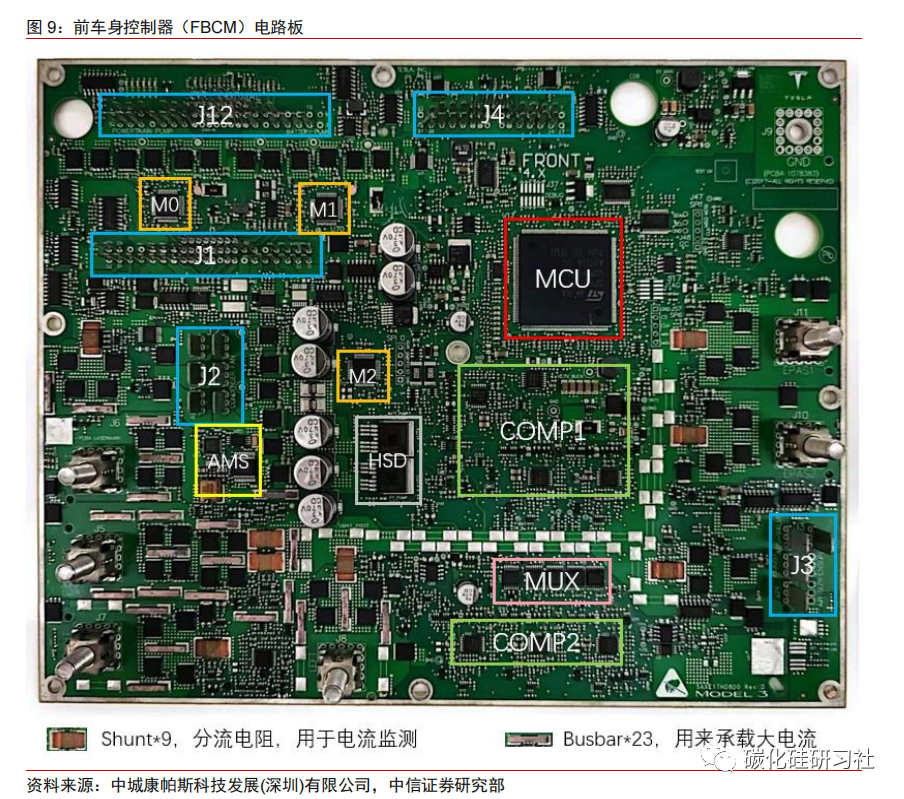
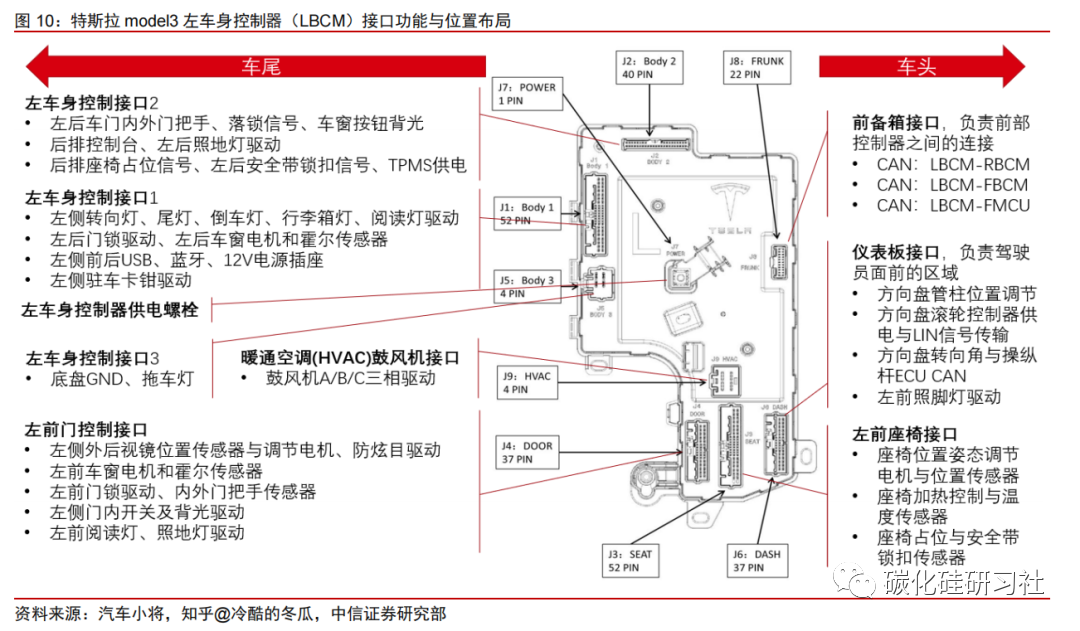
? 這一塊控制器電路板共使用了 52個安森美的大功率 MOSFET,9個功率整流器芯片,以及 ST 和英飛凌的共計 21 個 HSD 芯片。在前車身控制器上我們可以看到,特斯拉已經在很大程度上用半導體元件取代了傳統電氣元件。 ? 左車身域控制器:負責車身左側電子電氣調度 ? 左車身控制器位于駕駛員小腿左前方位置,貼合車體縱向放置,采用塑料殼體封裝,可以在一定程度上節約成本。左車身控制器負責管理駕駛艙及后部的左側車身部件,充分體現了盡可能節約線束長度以控制成本的指導思想。
左車身控制器主要負責了幾類電子電氣的配電和控制:
1、左側相關:包括儀表板、方向盤位置調節、照腳燈;
2、座椅和車門:,左前座椅、左后座椅、前門、后排車門、座椅、尾燈等。
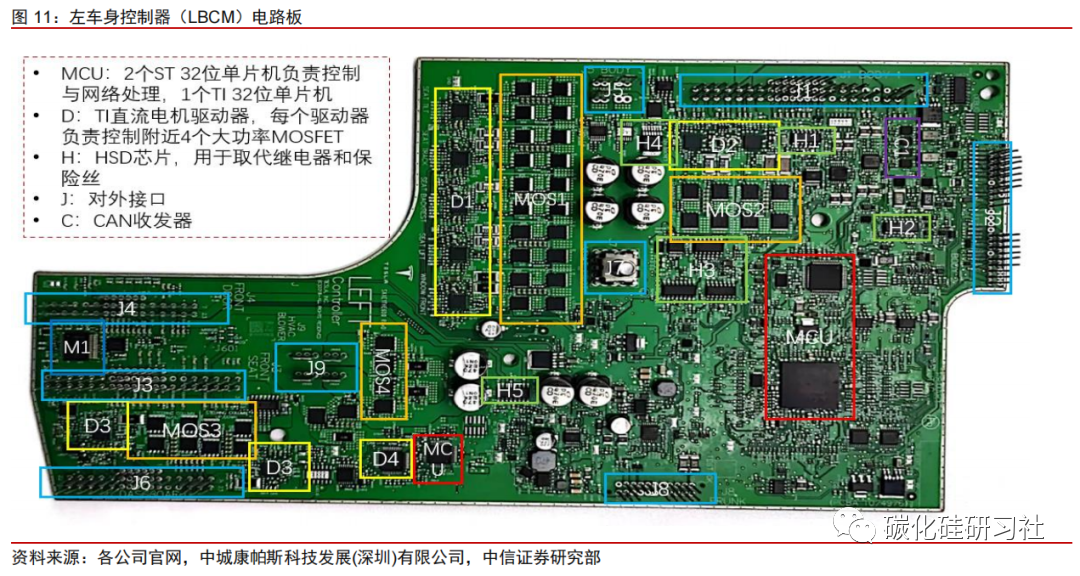
? 左車身域控制的核心芯片主要也分為控制和配電。核心控制功能使用兩顆 ST 的 32 位 MCU 以及一顆 TI 的 32 位單片機來實現。左車身的燈具和電機比較多,針對燈具類應用,特斯拉選用了一批 HSD 芯片來進行控制,主要采用英飛凌的 BTS 系列芯片。針對電機類應用,特斯拉則選用了 TI 的電機控制芯片和安森美的大功率 MOSFET。 ?
? 右車身域控制器:負責車身右側電子電氣調度 ? 右車身控制器與左車身基本對稱,接口的布局大體相同,也有一些不同點。右車身域負責超聲波雷達以及空調,同時右車身承擔的尾部控制功能更多一些,包括后方的高位剎車燈和后機油泵都在此控制。 ?
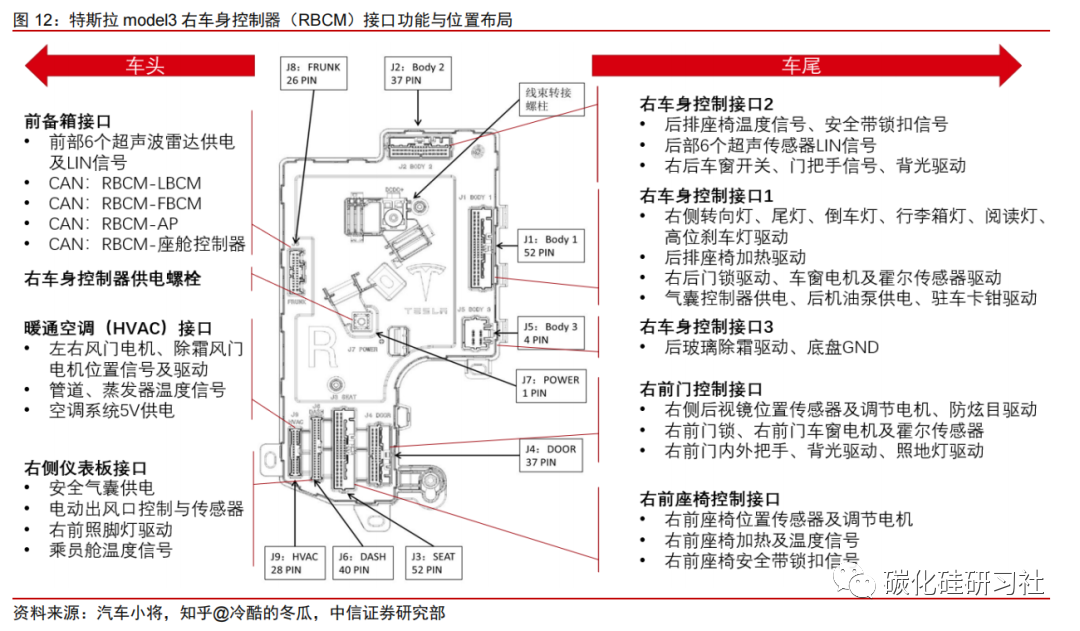
? 具體電路實現方面,由于功能較為相似,電路配置也與左車身較為相似。一個不同點在于右車身信號較多,所以將主控單片機從左車身的 ST 換成了瑞薩的高端單片機 RH850系列。此外由于右車身需要較多的空調控制功能,所以增加了三片英飛凌的半橋驅動器芯片。 ?
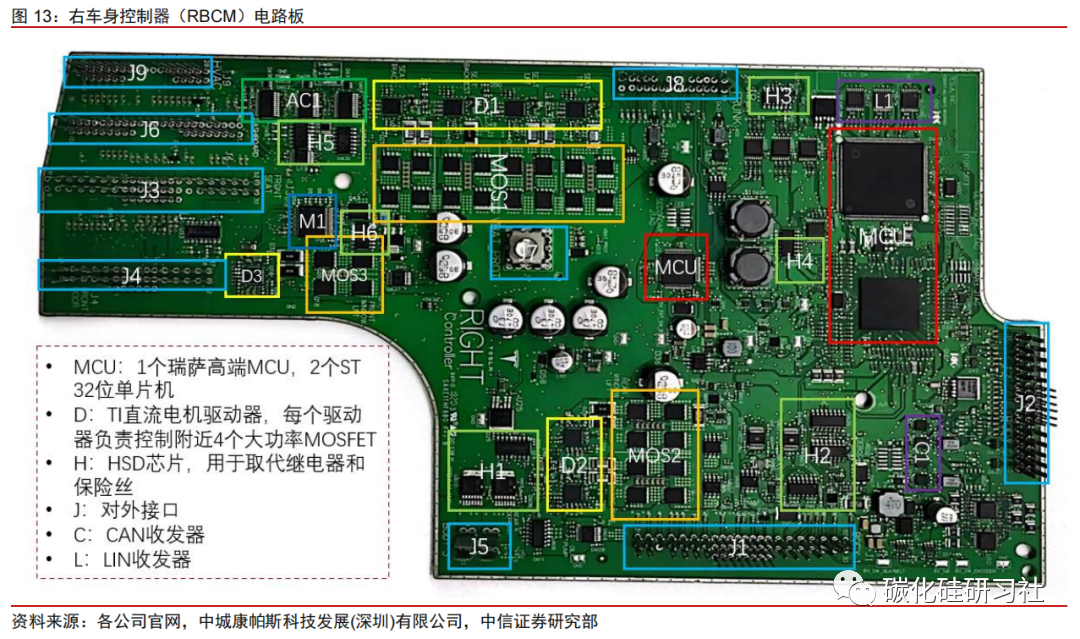
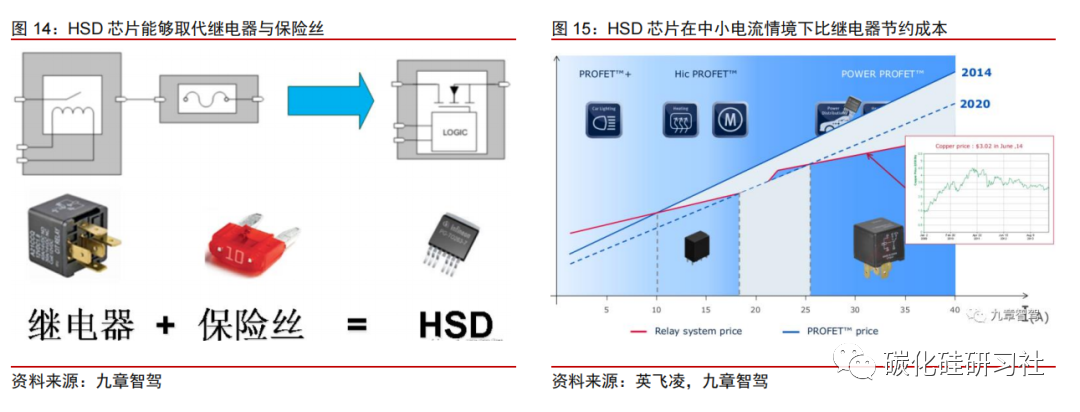
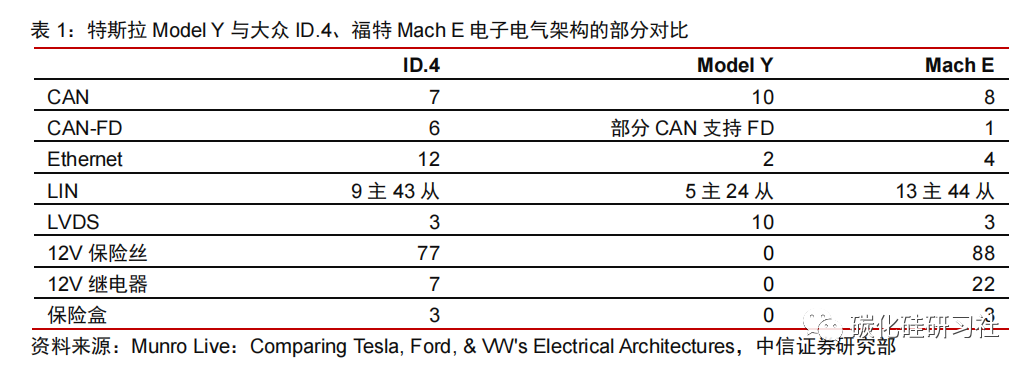
? 特斯拉車身域的思路:徹底地軟件定義汽車,用芯片替代保險絲和繼電器車身域是特斯拉相比傳統汽車變化最大的地方,傳統汽車采用了大量 ECU,而特斯拉通過三個域實現了對整車的一個控制。雖然都是往域控制器方向走,但特斯拉沒有采用博世的功能域做法,而是完全按區域來進行劃分,將硬件盡量標準化,通過軟件來定義汽車的思路體現得淋漓盡致。除此之外,特斯拉還將一些電氣化的部件盡量芯片化,如車身域中采用了大量 HSD 芯片替代了繼電器和保險絲,可靠性提高,而且可以編程,能更好實現軟件定義汽車。 ? ?
?
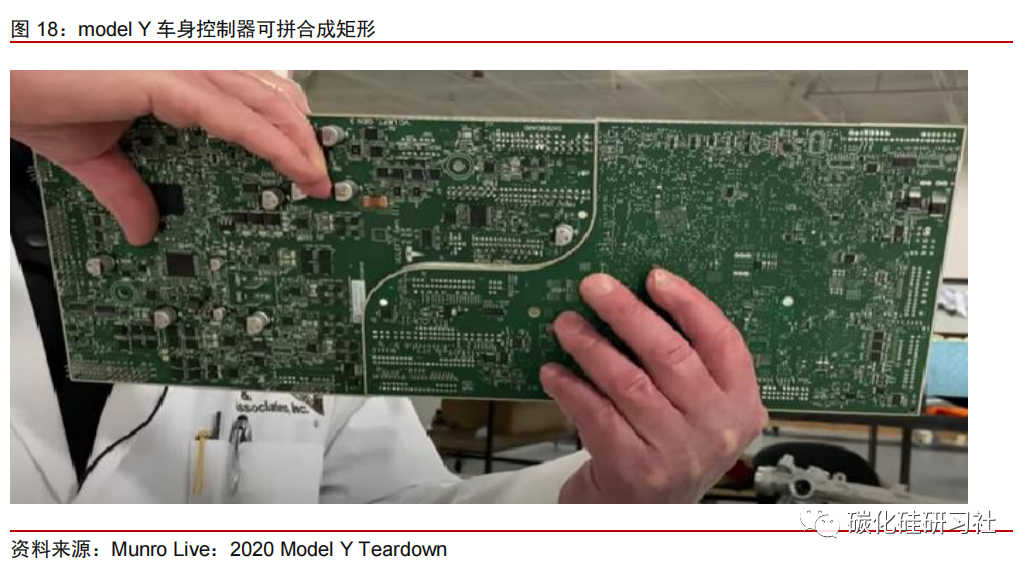
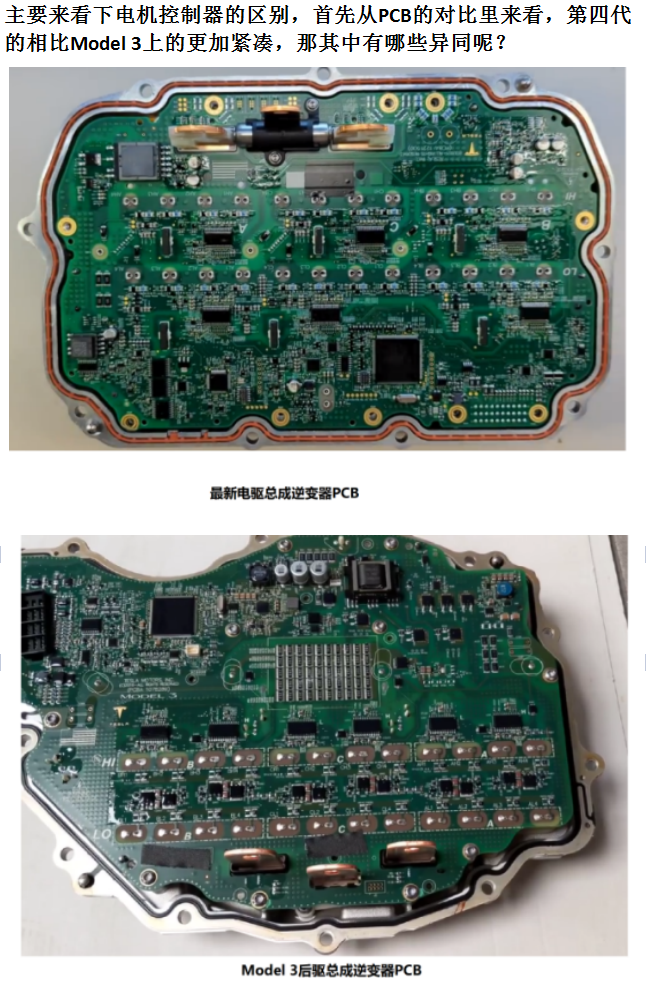
? 特斯拉控制器的未來走向:走向更高集成度,優化布置持續降本 ? 從特斯拉車身控制器能夠體現出的另一個發展趨勢是器件的持續集成和持續降本。早期版本的 model S 和 model X 并無如此集中的車身控制器架構,但如今較新的 model 3 和 model Y 已經體現出集成度增加的趨勢。左下圖中我們可以看到,作為第三代車身域控制器產品,model Y 的車身控制器已經與第一代的 model 3 有所不同,直觀上就是其元器件密度有所增加。比如圖中的 MOSFET(黑色小方塊),model Y 的間距明顯要比 model 3更小。 ? 因此,在同樣的面積下,控制器就能容納更多元件,融合更多功能。另外,與現有的 model 3 不同,model Y 控制器的背面也被利用起來,增加了一定數量的元器件,這使得控制器的集成度進一步提高。集成度提高的結果就是車身電子電氣架構的進一步簡化,汽車電子成本的進一步降低。 ?
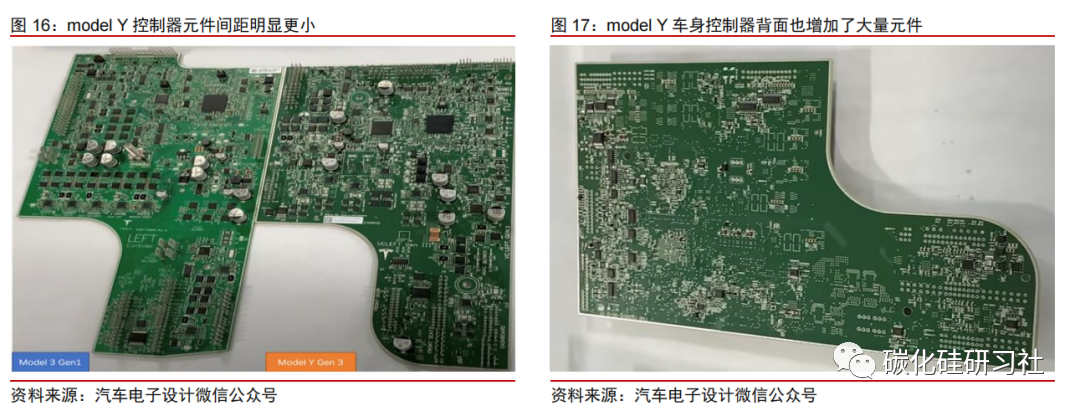
? 另外 2020 款 model Y 的 PCB 板也得到進一步節約。初代 PCB 板由于形狀不規則,必然有一部分 PCB 材料被浪費,推高了成本。而第三代控制器的 PCB 形狀能夠緊密貼合,兩個左右車身控制器可以合并成為一個矩形,因此 PCB 材料的利用率得到有效提升,也能夠在一定程度上降低成本。 ?
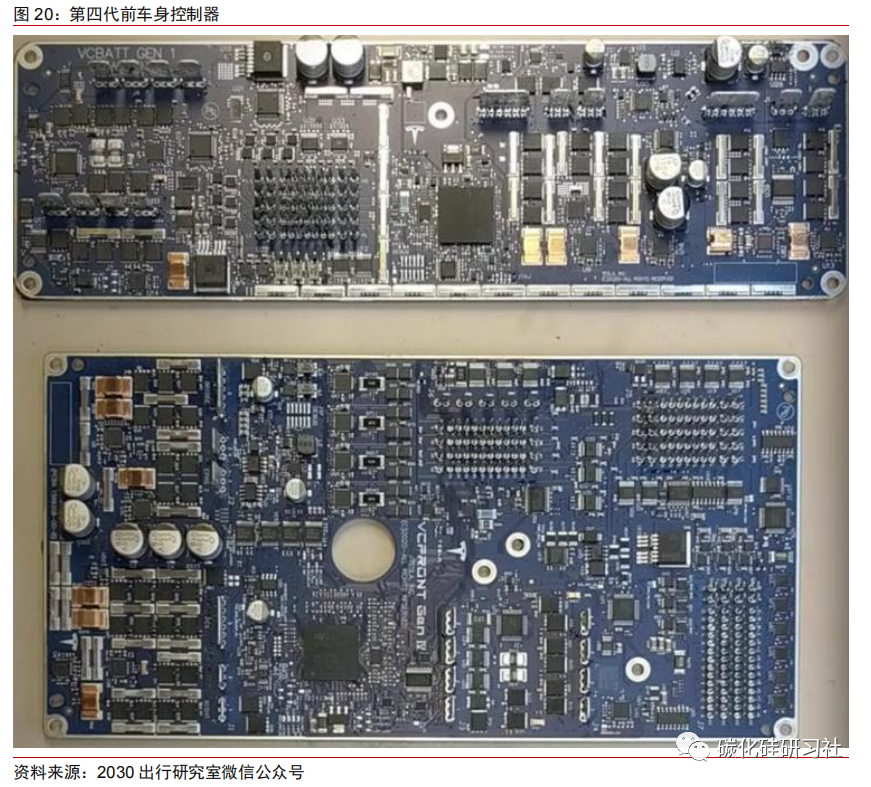
? 未來車身控制器會如何發展,是否會走向一臺統一的控制器?至少目前來看,特斯拉用產品對此做出了否定的回答。我們可以看到,2021 年交付的 model S plaid,其第四代車身控制器仍舊使用了分離的兩片左右車身控制器。 ?

? 而且在第四代車身控制器設計中,前車身控制器也分成了兩片,一片負責能量管理和配電,另一片負責車身管理、熱管理以及少量配電工作。整體來看,第四代控制器的元件密度仍舊很高,體現出了集成降本的趨勢。另外,第四代控制器的元件連接采用 Press-Fit技術取代了傳統焊接,進一步提高了良率,也有利于實現更高的元器件密度。 ?
? 整體來看,統一的中央計算機雖然集成度高,但不可避免地帶來了控制器和受控器件的距離增加,從而增加線束長度,提高成本,而且元件集成密度也有一定的限制,我們無法在有限的空間內無限制集成,因此集中化也是有上限和最優解的,目前看來特斯拉正逐漸改善設計和工藝來逼近這個最優解。 ? 硬件方面的持續集成也為軟件的集成和發展創造了條件。傳統汽車產業鏈當中不同功能獨立性很高,各功能的 ECU 都來自不同廠商,難以協同工作。但特斯拉將大量 ECU 集成后,車身上只需保留負責各個功能的執行器,而主要的控制功能都統一在域控制器中,采用少量的 MCU,更多使用軟件來完成功能控制。比如特斯拉 model 3 的左右車身域控制器中各有 3 個 MCU,數量大大減少,不同控制功能采用軟件的形式進行交互,能夠有更大的協同創新空間。比如特斯拉可以協同全車空調出風口來調節車內風場,或對副駕駛座位上的乘客進行體重檢測,判斷其是否屬于兒童,從而靈活調整安全氣囊策略,而不是像傳統車企一樣只能讓兒童坐在后排。而且特斯拉可以從軟件控制當中收集數據,并持續不斷改善控制功能,改善用戶體驗。 ? 特斯拉這種軟硬件持續集成的方案在帶來優勢的同時也對軟件開發能力提出了更高要求。只有統攬全局軟硬件方案、熟悉各個部件特性的整車廠商才有能力開發如此龐大復雜的軟件系統,傳統車企一直以來扮演集成商的角色,ECU 軟件開發更多依賴供應商,其人才隊伍構成和供應鏈方面的利益關系導致其短時間內難以模仿特斯拉的方式,因而特斯拉的車身控制軟件也成為其獨特的競爭力。 ? 駕駛域:FSD 芯片和算法構成主要壁壘,NPU 芯片效率更優 ? 特斯拉的另一個重要特色就是其智能駕駛,這部分功能是通過其自動駕駛域控制器(AP)來執行的。本部分的核心在于特斯拉自主開發的 FSD 芯片,其余配置則與當前其他自動駕駛控制器方案沒有本質區別。 ? 在 model 3 所用的 HW3.0 版本的 AP 中,配備兩顆 FSD 芯片,每顆配置 4 個三星 2GB內存顆粒,單 FSD總計 8GB,同時每顆 FSD配備一片東芝的 32GB閃存以及一顆 Spansion的 64MB NOR flash 用于啟動。網絡方面,AP 控制器內部包含 Marvell 的以太網交換機和物理層收發器,此外還有 TI 的高速 CAN 收發器。對于自動駕駛來說,定位也十分重要,因此配備了一個 Ublox 的 GPS 定位模塊。 ? 外圍接口方面,model 3 整車的所有攝像頭都直接連接到 AP 控制器,與這些相機配合的還有 TI 的視頻串行器和解串器。此外還有供電接口、以太網接口和 CAN 接口使得 AP控制器能夠正常運作。作為一款車載控制器,特斯拉的自動駕駛域控制器還考慮到了緊急情況,因此配備了緊急呼叫音頻接口,為此搭配了 TI 的音頻放大器和故障 CAN 收發器。 ?
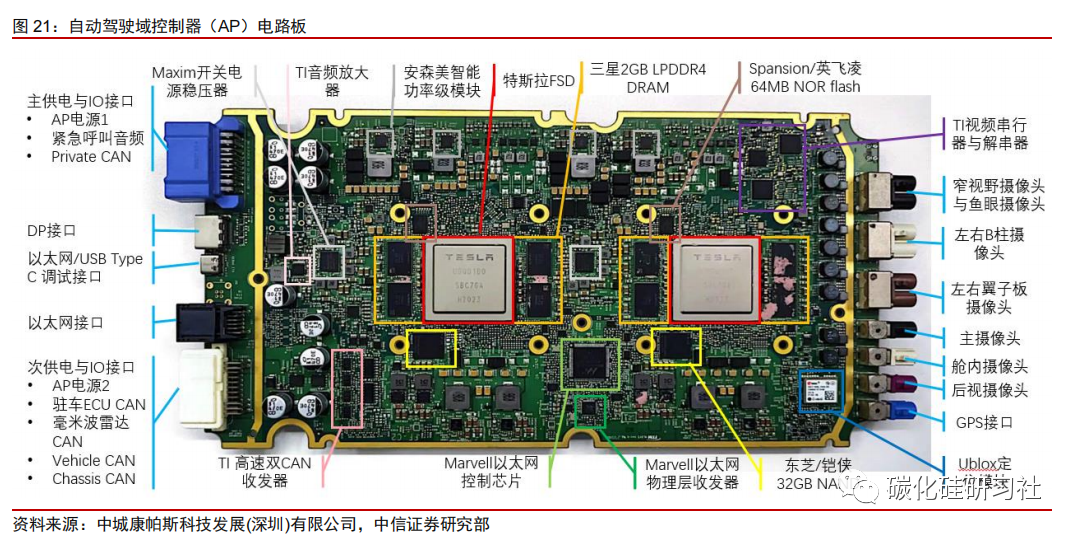
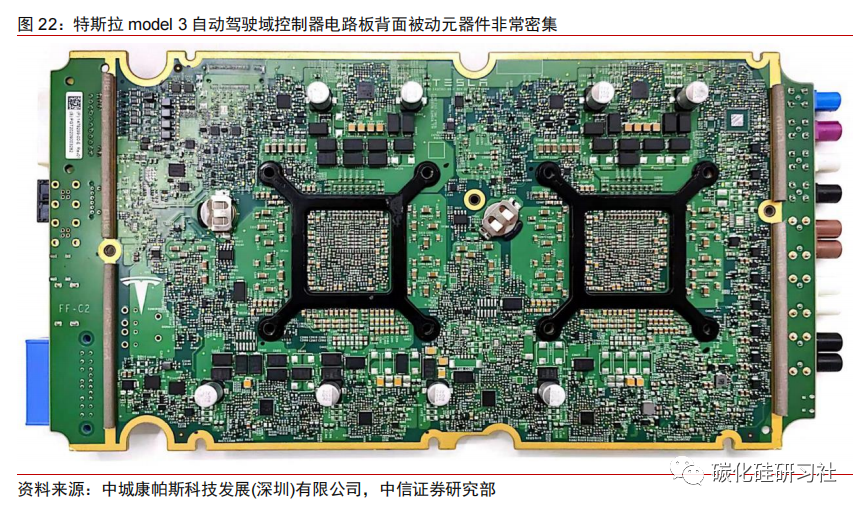
? 另外一點值得注意的是,為了保障駕駛安全,AP 控制器必須時刻穩定運行,因此特斯拉在 AP 控制器中加入了相當大量的被動元件,正面有 8 顆安森美的智能功率模塊,并搭配大量的電感和電容。背面更為明顯,在幾乎沒有太多控制芯片的情況下將被動元件鋪滿整個電路板,密度之高遠超其他控制器,也明顯高于生活中各種常見的智能終端。從這一點來看,隨著智能汽車的發展,我國被動元器件企業也有望獲益。
? 為了實現自動駕駛,特斯拉提出了一整套以視覺為基礎,以 FSD 芯片為核心的解決方案,其外圍傳感器主要包含 12 個超聲傳感器(Valeo)、8 個攝像頭(風擋玻璃頂 3 個前視,B 柱 2 個拍攝側前方,前翼子板 2 個后視,車尾 1 個后視攝像頭,以及 1 個 DMS 攝像頭)、1 個毫米波雷達(大陸)。 ?
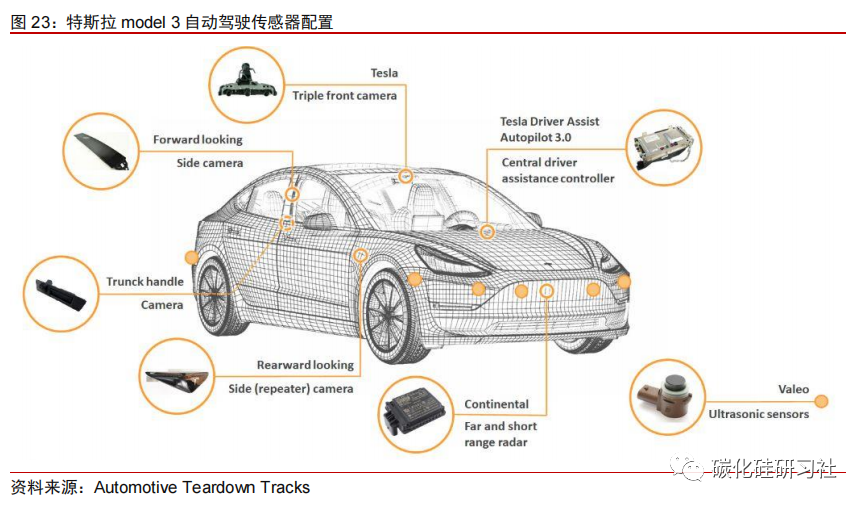
? 其最核心的前視三目攝像頭包含中間的主攝像頭以及兩側的長焦鏡頭和廣角鏡頭,形成不同視野范圍的搭配,三個攝像頭用的是相同的安森美圖像傳感器。 ?

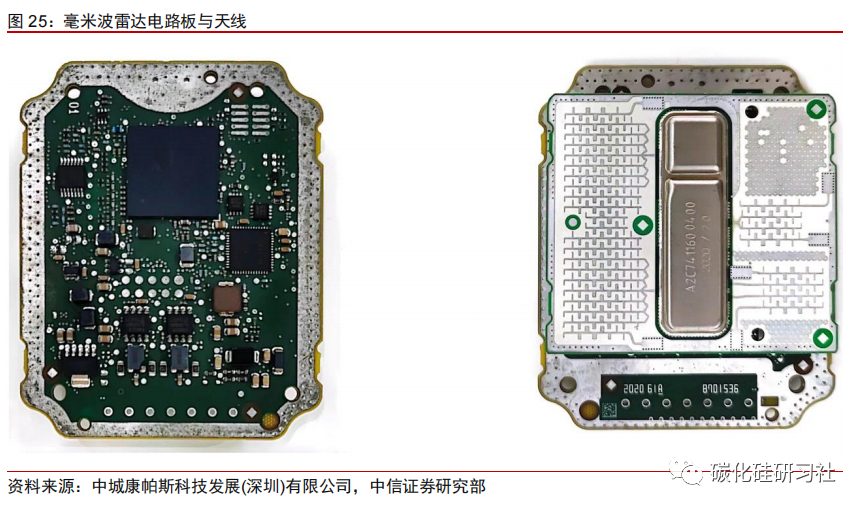
? 毫米波雷達放置于車頭處車標附近,包含一塊電路板和一塊天線板。該毫米波雷達內部采用的是一顆 Freescale 控制芯片以及一顆 TI 的穩壓電源管理芯片。 ?
? 而整個 AP 控制器的真正核心其實就是 FSD 芯片,這也是特斯拉實現更高 AI 性能和更低成本的的一個重點。與當前較為主流的英偉達方案不同,特斯拉 FSD 芯片內部占據最大面積的并非CPU和GPU,而是NPU。雖然此類設計完全是為神經網絡算法進行優化,通用性和靈活性相對不如英偉達的 GPU 方案,但在當前 AI 算法尚未出現根本性變化的情況下,NPU 的適用性并不會受到威脅。 ?
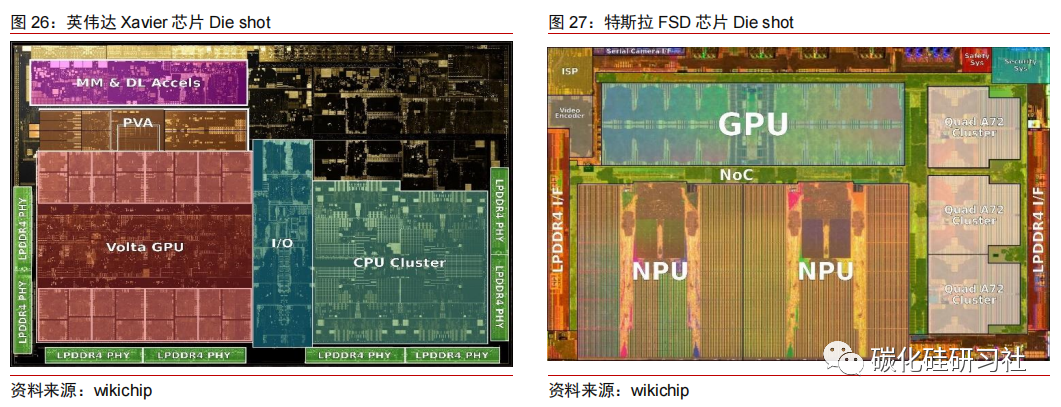
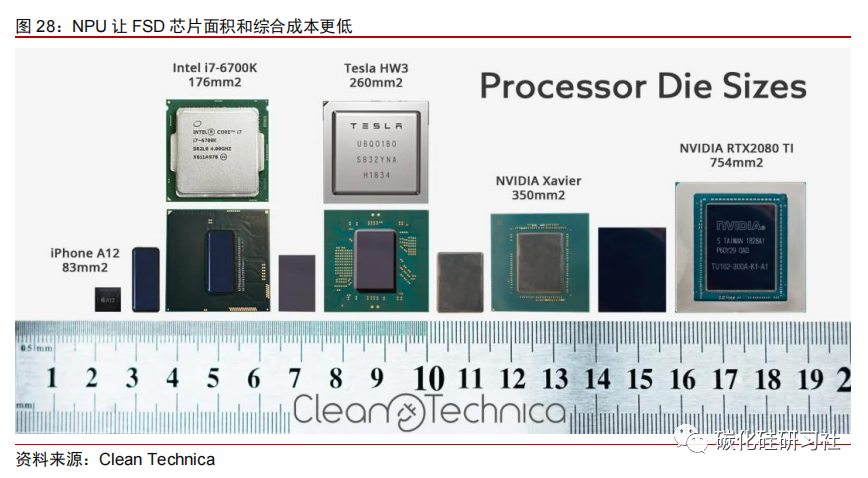
? NPU 單元能夠對常見視覺算法中的卷積運算和矩陣乘法運算進行有效加速,因此特斯拉 FSD 芯片能夠使用三星 14nm 工藝,達到 144TOPS 的 AI 算力,而面積只有約 260 平方毫米。相比而言,英偉達 Xavier 使用臺積電 12nm 工藝,使用 350 平方毫米的芯片面積卻只得到 30TOPS 的 AI 算力。這樣的差距也是特斯拉從 HW2.5 版本的英偉達 Parker SoC 切換到 HW3.0 的自研 FSD 芯片的原因。因此,在算法不發生根本性變革的情況下,特斯拉 FSD 能取得成本和性能的雙重優勢,這也構成了特斯拉自動駕駛方案的競爭力。 ?
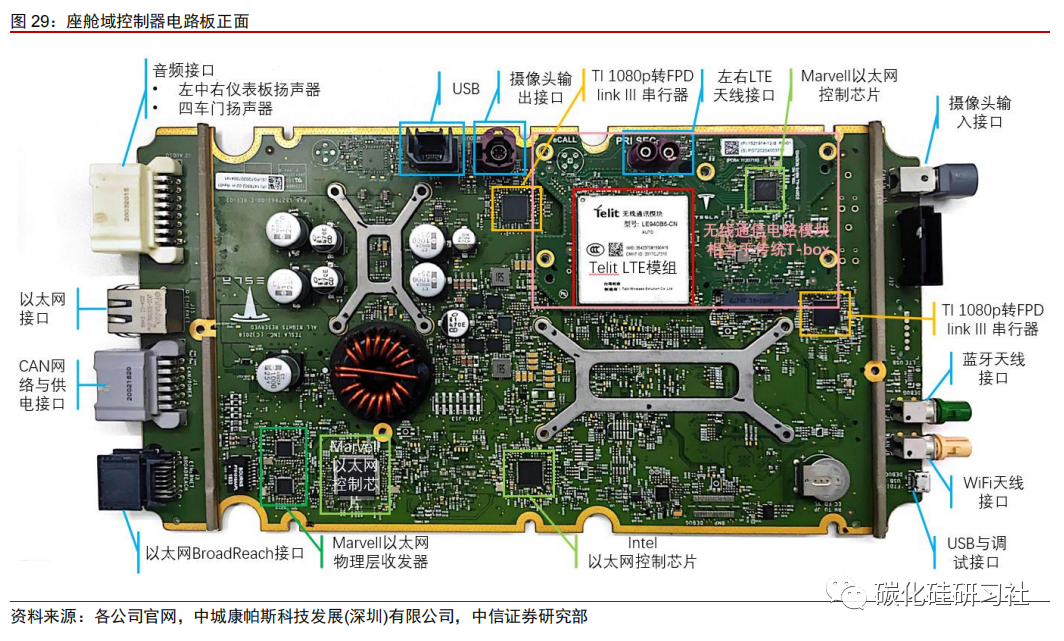
? AI 算法方面,根據特斯拉官網人工智能與自動駕駛頁面的描述,AutoPilot 神經網絡的完整構建涉及 48 個網絡,每天依據其上百萬輛車產生的數據進行訓練,需要訓練 70000 GPU 小時。基礎代碼層面,特斯拉具備可以 OTA 的引導程序,還有自定義的 Linux 內核(具有實時性補丁),也有大量內存高效的低層級代碼。 ? 未來自動駕駛域的創新仍然會集中在芯片端,另外傳感器的創新如激光雷達、4D 毫米波雷達等也能夠很大程度上推動智能駕駛。在可見的未來,專用 AI 芯片將能夠成為與英偉達競爭的重要力量,我國 AI 芯片企業有望借助智能汽車的東風獲得更好發展。 ? 座艙域:特斯拉更多將座艙視為 PC 而非手機 ? 座艙域是用戶體驗的重要組成部分,特斯拉的座艙控制平臺也在不斷進化中。本次拆解的特斯拉model 3 2020款采用的是第二代座艙域控制器(MCU2)。 ? MCU2 由兩塊電路板構成,一塊是主板,另一塊是固定在主板上的一塊小型無線通信電路板(圖中粉色框所示)。這一塊通信電路板包含了 LTE 模組、以太網控制芯片、天線接口等,相當于傳統汽車中用于對外無線通信的 T-box,此次將其集成在 MCU 中,能夠節約空間和成本。我們本次拆解的 2020 款 model 3 采用了 Telit 的 LTE 模組,在 2021 款以后特斯拉將無線模組供應商切換成移遠通信。 ? MCU2 的主板采用了雙面 PCB 板,正面主要布局各種網絡相關芯片,例如 Intel 和Marvell 的以太網芯片,Telit 的 LTE 模組,TI 的視頻串行器等。正面的另一個重要作用是提供對外接口,如藍牙/WiFi/LTE 的天線接口、攝像頭輸入輸出接口、音頻接口、USB 接口、以太網接口等。 ?
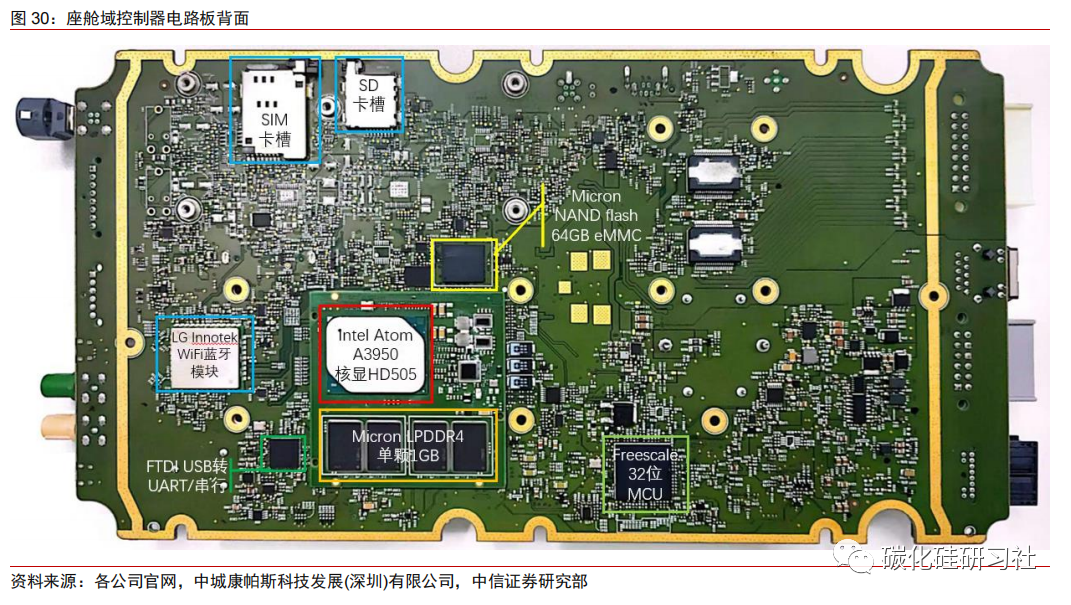
? 而 MCU2 的背面更為重要,其核心是一顆 Intel Atom A3950 芯片,搭配總計 4GB 的Micron 內存和同樣是 Micron 提供的 64GB eMMC 存儲芯片。此外還有 LG Innotek 提供的WiFi/藍牙模塊等。 ?
? 在座艙平臺上,特斯拉基于開源免費的 Linux 操作系統開發了其自有的車機操作系統,由于 Linux 操作系統生態不如 Android 生態豐富,特斯拉需要自己進行一部分主流軟件的開發或適配。 ? 座艙域的重要作用就是信息娛樂,MCU2 在這一方面表現尚顯不足。伴隨 A3950 芯片低價的是其性能有限,據車東西測試稱,在 MCU2 上啟動騰訊視頻或 bilibili 的時間都超過了 20 秒,且地圖放大縮小經常卡頓。卡頓的原因是多方面的,一方面 A3950 本身算力有限,集成顯卡 HD505 性能也比較弱,處理器測評網站 NotebookCheck 對英特爾 HD 505的評價是,截至 2016 年的游戲,即使是在最低畫質設置下,也很少能流暢運行。 ? 另一方面,速度較慢、壽命較短的eMMC(embedded MultiMedia Card)閃存也會拖累系統性能。eMMC 相對機械硬盤具備速度和抗震優勢,但擦寫壽命可能只有數百次,隨著使用次數增多,壞塊數量增加,eMMC 的性能將逐漸惡化,在使用周期較長的汽車上這一弊端可能會得到進一步放大,導致讀寫速度慢,使用卡頓,2021 年年初,特斯拉召回初代 MCU eMMC 可以佐證這一點。綜合來看,特斯拉 MCU2 相比同時期采用高通 820A 的車機,屬于偏弱的水平。 ? 但特斯拉作為一家重視車輛智能水平的企業,并不會坐視落后的局面一直保持下去。2021 年發布的所有新款車型都換裝 AMD CPU(zen+架構)和獨立顯卡(RDNA2 架構),GPU 算力提升超過 50 倍,存儲也從 eMMC 換成了 SSD,讀寫性能和壽命都得到大幅改善。整體來看,相比 MCU2,MCU3 性能獲得明顯提升,提升幅度比第一代到第二代的跨度更大。 ?
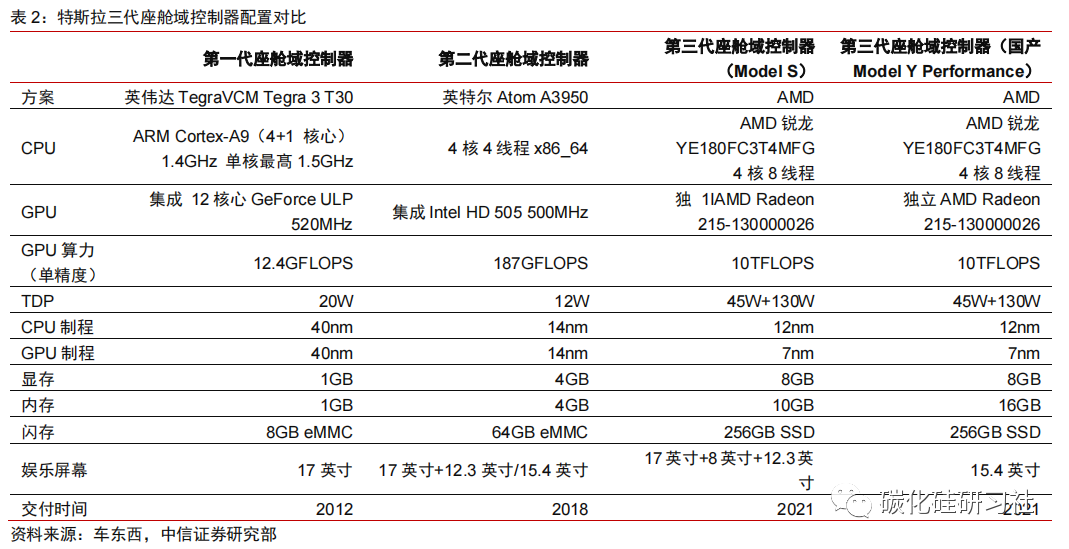
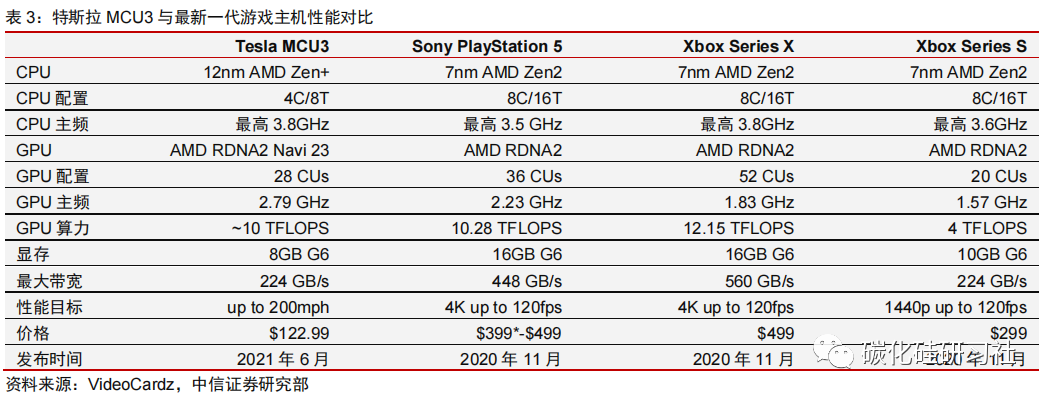
? 最新一代的特斯拉 MCU 配置已經與當前最新一代的主流游戲主機較為接近,尤其是GPU 算力方面不輸索尼 PS5 和微軟 Xbox Series X。 ?
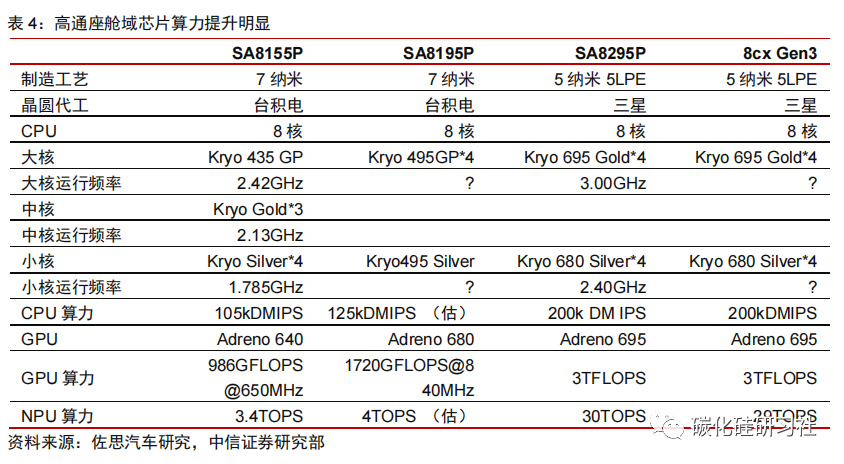
? 提升的配置也讓使用體驗得到大幅提升。根據車東西的測試,MCU3 加載 bilibili 的時間縮短到 9 秒,瀏覽器啟動時間為 4 秒,地圖也能夠流暢操作,雖然相比手機加載速度仍然不夠,但已經有明顯改善。另外 MCU3 的龐大算力讓其能夠運行大型游戲,比如 2021年 6 月新款特斯拉 model S 交付儀式上,特斯拉工作人員就現場展示了用手柄和車機玩賽博朋克 2077。而且特斯拉官網上,汽車內部渲染圖中,車機屏幕上顯示的是巫師 3。這兩個案例已經說明,MCU3 能夠充分支持 3A 游戲,使用體驗一定程度上已經可以與 PC 或游戲主機相比較。 ? ? ? 從特斯拉車機與游戲的不斷靠攏我們可以看到未來座艙域的發展第一個方向,即繼續推進大算力與強生態。目前除特斯拉采用x86座艙芯片外,其他車企采用ARM體系較多,但同樣呈現出算力快速增長的趨勢,這一點從主流的高通 820A到8155,乃至下一代的8295都能夠得到明顯體現。高通下一代座艙芯片8295性能基本與筆記本電腦所用的8cx相同。可以看到無論是特斯拉用的 AMD芯片還是其他車企用的高通芯片,目前趨勢都是從嵌入式的算力水平向 PC的算力水平靠攏,未來也有可能進一步超越PC算力。 ?
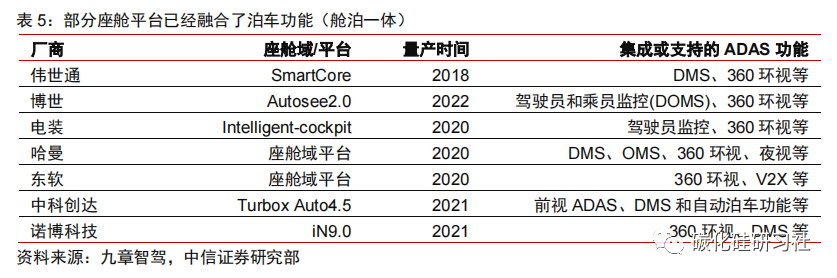
? 而且高算力讓座艙控制器能夠利用現有的軟件生態。特斯拉選用x86,基于Linux開發操作系統,利用現有的PC游戲平臺,其他廠商更多利用現有的ARM-Android移動生態。這一方向發展到一定階段后,可能會給車企帶來商業模式的改變,汽車將成為流量入口,車企可以憑借車載的應用商店等渠道獲得大量軟件收入,并且大幅提高毛利率。 ? 座艙域控制器的第二個發展方向則是可能與自動駕駛控制器的融合。首先,當前座艙控制器的算力普遍出現了過剩,剩余的算力完全可以用于滿足一些駕駛類的應用,例如自動泊車輔助等。 ? 其次,一些自動駕駛功能尤其是泊車相關功能需要較多人機交互,這正是座艙控制器的強項。而且,座艙控制器與自動駕駛控制器的融合還能夠帶來一定的資源復用和成本節約,停車期間可以將主要算力用于進行游戲娛樂,行駛期間則將算力用于保障自動駕駛功能,而且這種資源節約能夠讓汽車少一個域控制器,按照MCU3的價格,或許能夠為每臺車節約上百美元的成本。目前已經出現了相當多二者融合的跡象,比如博世、電裝等主流供應商紛紛在座艙域控制器中集成ADAS功能,未來這一趨勢有望普及。 ?
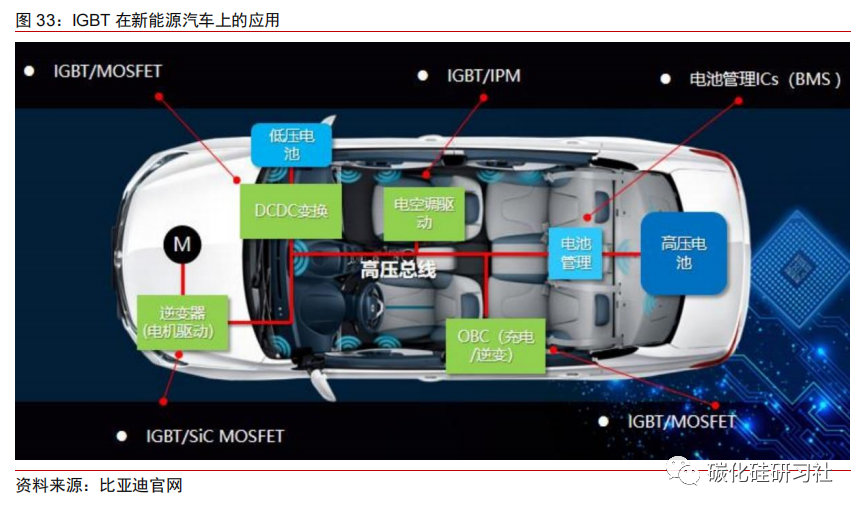
? 電控域:IGBT宏圖大展,SiC鋒芒初露 ? IGBT:汽車電力系統中的“CPU”,廣泛受益于電氣化浪潮 ? IGBT相當于電力電子領域的“CPU”,屬于功率器件門檻最高的賽道之一。功率半導體又稱為電力電子器件,是電力電子裝置實現電能轉換、電路控制的核心器件,按集成度可分為功率 IC、功率模塊和功率分立器件三大類,其中功率器件又包括二極管、晶閘管、MOSFET 和 IGBT 等。 ? 應用場景的增量擴張使得汽車領域成為市場規模最大,增長速度最快的 IGBT 應用領域。根據集邦咨詢數據,新能源汽車(含充電樁)是 IGBT 最主要的應用領域,其占比達31%。IGBT 在汽車中主要用于三個領域,分別是電機驅動的主逆變器、充電相關的車載充電器(OBC)與直流電壓轉換器(DC/DC)、完成輔助應用的模塊。 ? 1)主逆變器:主逆變器是電動車上最大的 IGBT 應用場景,其功能是將電池輸出的大功率直流電流轉換成交流電流,從而驅動電機的運行。除 IGBT 外,SiC MOSFET 也能完成主逆變器中的轉換需求。 ? 2)車載充電器(OBC)與直流電壓轉換器(DC/DC):車載充電器搭配外界的充電樁,共同完成車輛電池的充電工作,因此 OBC 內的功率器件需要完成交-直流轉換和高低壓變換工作。DC/DC 轉換器則是將電池輸出的高壓電(400-500V)轉換成多媒體、空調、車燈能夠使用的低壓電(12-48V),常用到的功率半導體為 IGBT 與 MOSFET。 ? 3)輔助模塊:汽車配備大量的輔助模塊(如:車載空調、天窗驅動、車窗升降、油泵等),其同樣需要功率半導體完成小功率的直流/交流逆變。這些模塊工作電壓不高,單價也相對較低,主要用到的功率半導體為 IGBT 與 IPM。 ?
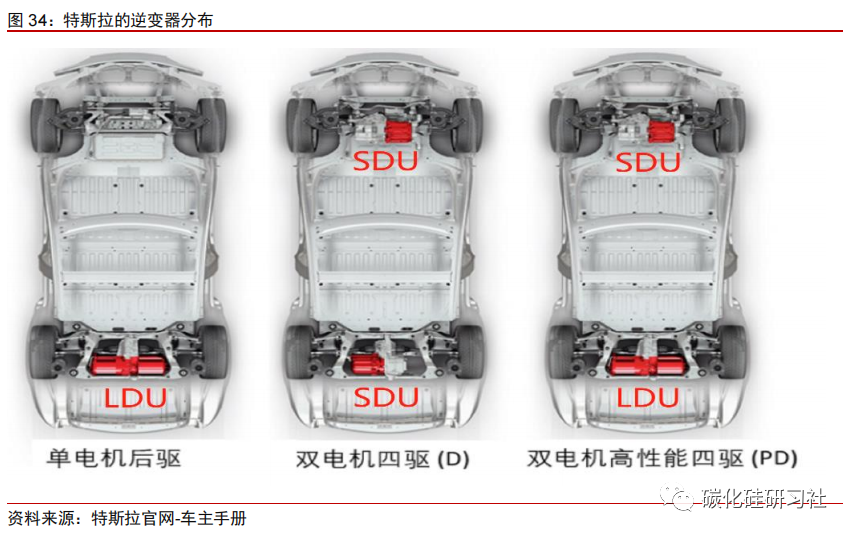
? 以逆變器為例,Model S 的動力總成有兩種,分別為 Large Drive Unit(LDU)和 Small Drive Unit(SDU),前者裝配在“單電機后驅版本”中的后驅、“雙電機高性能四驅版本”中的后驅,后者裝配在“雙電機四驅版本”中的前后驅、“雙電機高性能四驅版本”中的前驅。 ?
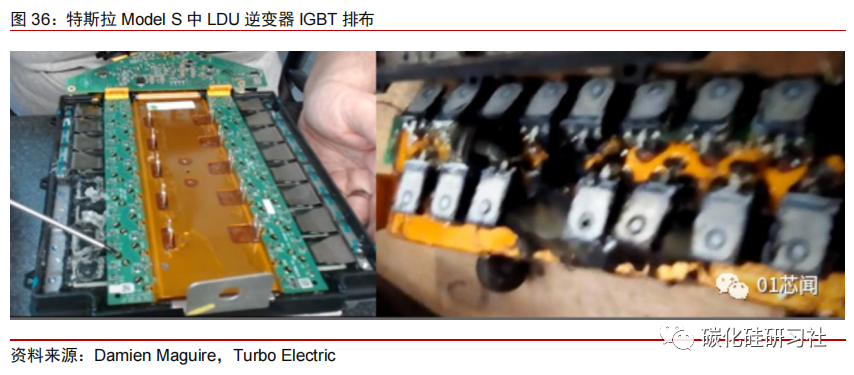
? LDU 尺寸較大,輸出功率也較大,內部的逆變器包含 84 個 IGBT。LDU 的逆變器呈現三棱鏡構造,每個半橋位于三棱鏡的每個面上,每個半橋的 PCB 驅動板(三角形)位于三棱鏡的頂部,電池流出的高壓直流電由頂部輸入,逆變后的高壓交流電由底部輸出。 ?
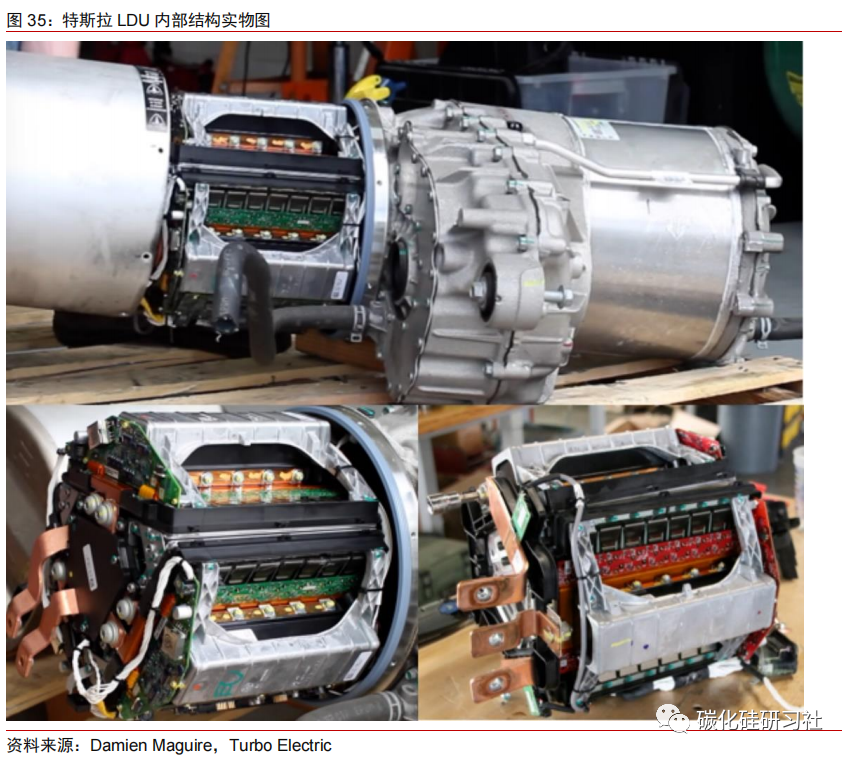
? Model S(單電機版本)全車共有 96個IGBT,其中有 84個IGBT 位于逆變器中,為其三相感應電機供電,84個IGBT 的型號為英飛凌的 IKW75N60T。若以每個 IGBT 5美元計算,Model S 逆變器所使用的 IGBT 價格約為 420 美元。 ?
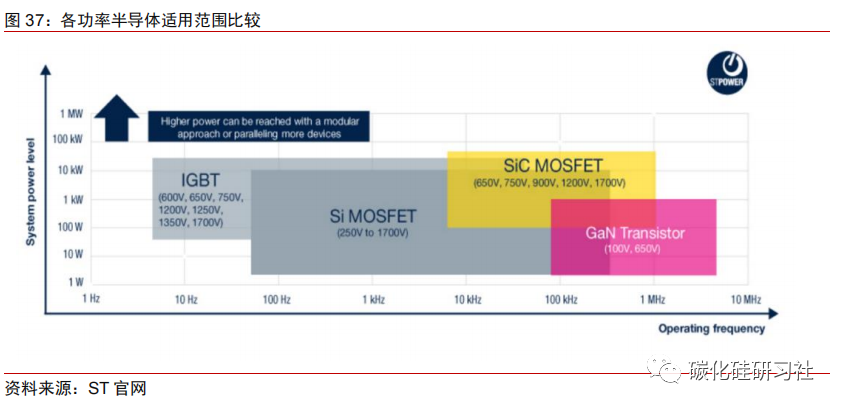
? 而 SDU 的形態更小,內部結構也更為緊湊,內部逆變器含 36 個 IGBT。根據01芯聞拆解,SDU 中的IGBT為單管IGBT,型號為英飛凌的 AUIRGPS4067D1,總用量為 36片。IGBT 單管的布局也有較大變化,IGBT 單管背靠背固定在散熱器中,組成類似三明治的結構,充分利用內部空間。同時,SDU 內部 IGBT 的管腳也無需折彎,降低失效概率。相比 LDU,SDU 的出現體現出特斯拉對 IGBT 更高的關注度與要求,其機械、電學、成本、空間等指標均有明顯提升。 ? SiC:Model 3 開創應用先河,與 IGBT 各有千秋 ? 與 IGBT 類似,SiC 同樣具有高電壓額定值、高電流額定值以及低導通和開關損耗等特點,因此非常適合大功率應用。SiC 的工作頻率可達 100kHz 以上,耐壓可達 20kV,這些性能都優于傳統的硅器件。其于上世紀 70 年代開始研發,2010 年 SiC MOSFET 開始商用,但目前并未大規模推廣。 ?
? Model 3 為第一款采用全 SiC 功率模塊電機控制器的純電動汽車,開創 SiC 應用的先河。基于 IGBT 的諸多優勢,在 Model 3 問世之前,世面上的新能源車均采用 IGBT 方案。而 Model 3 利用 SiC 模塊替換 IGBT 模塊,這一里程碑式的創新大大加速了 SiC 等寬禁帶半導體在汽車領域的推廣與應用。根據SystemPlus consulting 拆解報告,Model 3 的主逆變器上共有 24 個 SiC 模塊,每個模塊包含 2 顆 SiC 裸晶(Die),共 48 顆 SiC MOSFET。 ?
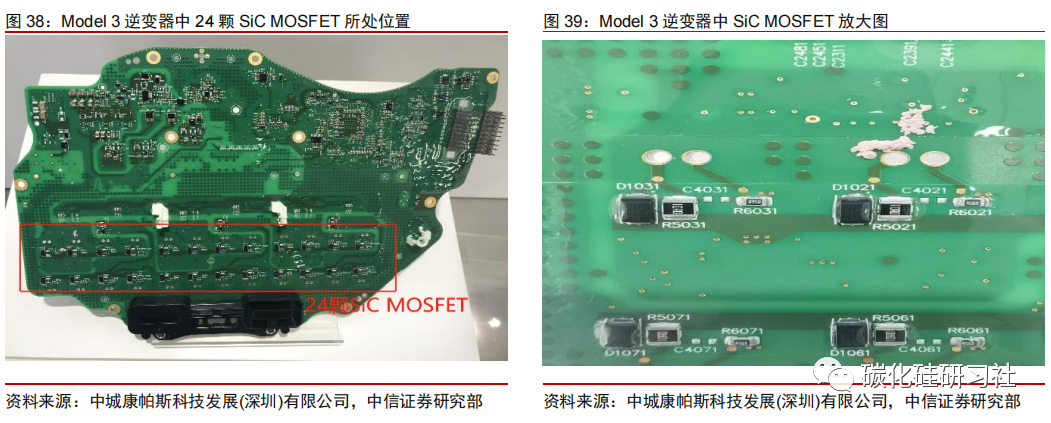
? Model 3 所用的 SiC 型號為意法半導體的 ST GK026。在相同功率等級下,這款 SiC模塊采用激光焊接將 SiC MOSFET、輸入母排和輸出三相銅進行連接,封裝尺寸也明顯小于硅模塊,并且開關損耗降低 75%。采用 SiC 模塊替代 IGBT 模塊,其系統效率可以提高5%左右,芯片數量及總面積也均有所減少。如果仍采用 Model X 的 IGBT,則需要 54-60顆 IGBT。 ?
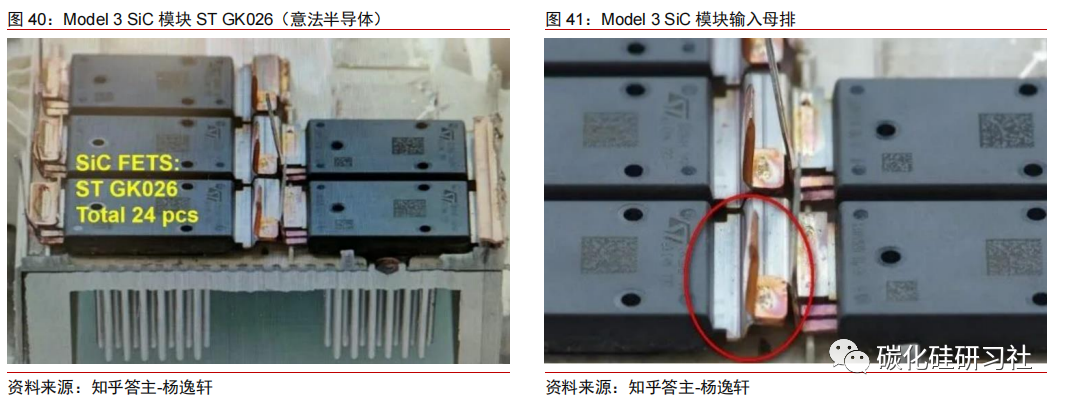
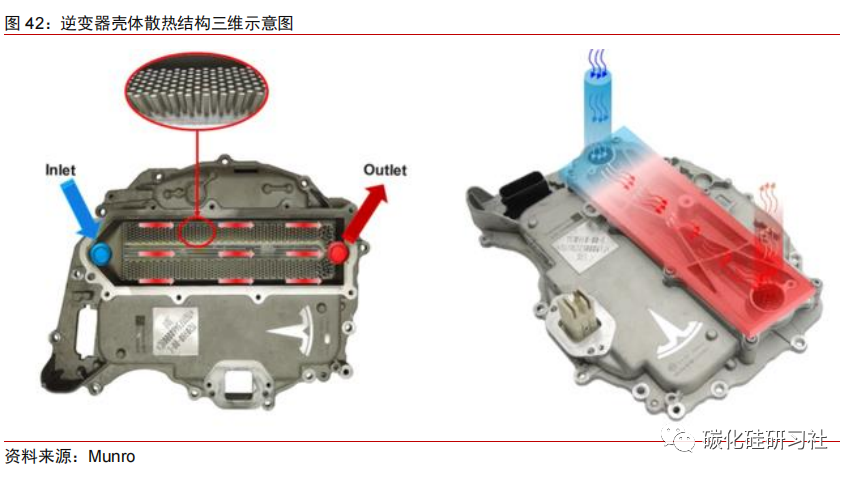
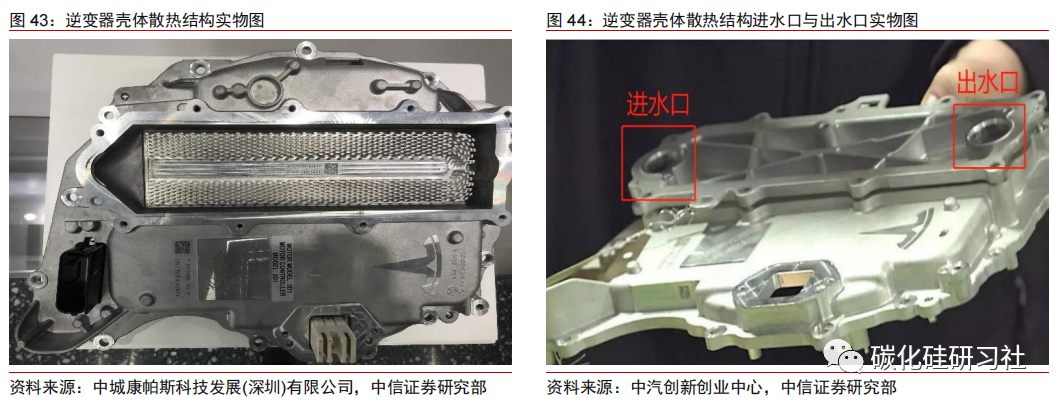
? 24 個模組每個半橋并聯四個,利用水冷進行散熱。24 個模塊排列緊密,每相 8 個,單個開關并聯 4 個。模組下方緊貼水冷散熱器,并利用其進行散熱。可以看到,模塊所在位置的背面有多根棒狀排列的散熱器(擾流柱散熱器),利用冷卻水進行水冷。水通道由稍大的蓋板覆蓋和密封。 ?
?
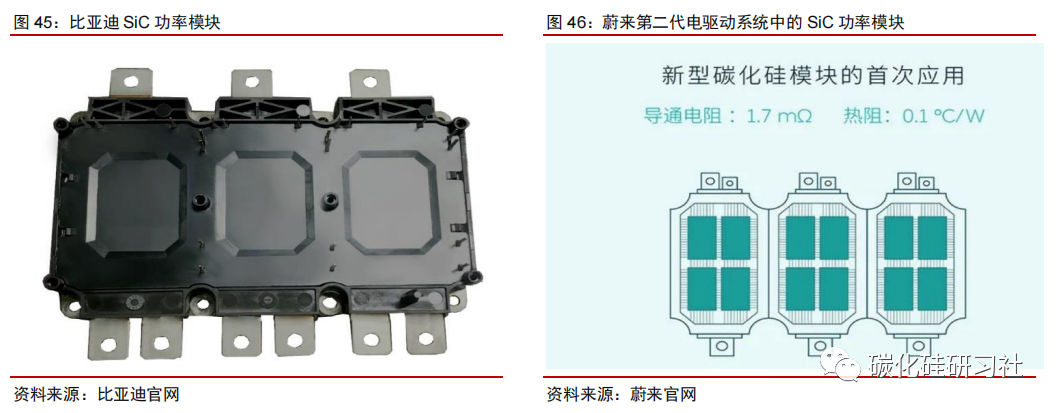
? Model 3 形成“示范效應”后,多家車廠陸續跟進 SiC 方案。在 Model 3 成功量產并使用后,其他廠商開始逐漸認識到 SiC 在性能上的優越性,并積極跟進相關方案的落地。2019 年 9 月,科銳與德爾福科技宣布開展有關車用 SiC 器件的合作,科銳于 2020 年 12月成為大眾 FAST 項目 SiC 獨家合作伙伴;2020 年,比亞迪“漢”EV 車型下線,該車搭載了比亞迪自主研發的的 SiC MOSFET 模塊,加速性能與續航顯著提升;2021 年,比亞迪在其“唐”EV 車型中加入 SiC 電控系統;2021 年 4 月,蔚來推出的轎車 ET7 搭載具備 SiC 功率模塊的第二代高效電驅平臺;小鵬、理想、捷豹、路虎也在逐漸布局 SiC。 ?
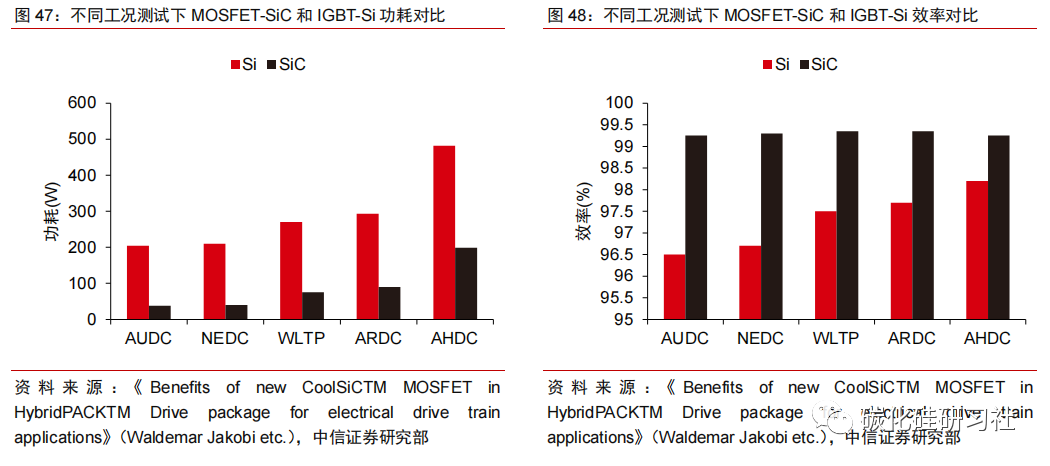
? 相比 IGBT,SiC 能夠帶動多個性能全面提升,優勢顯著。由于 Si-IGBT 和 Si-FRD組成的 IGBT 模塊在追求低損耗的道路上走到極致,意法半導體、英飛凌等功率器件廠商紛紛開始研發 SiC 技術。與 Si 基材料相比,SiC 器件的優勢集中體現在: ? ? 1)SiC 帶隙寬,工作結溫在 200℃以上,耐壓可達 20kV; ? 2)SiC 器件體積可以減少至 IGBT 的 1/3~1/5,重量減少至 40%~60%; ? 3)功耗降低 60%~80%,效率提升 1%~3%,續航提升約 10%。在多項工況測試下,SiC MOSFET 相比 Si-IGBT 在功耗和效率上優勢顯著。 ?
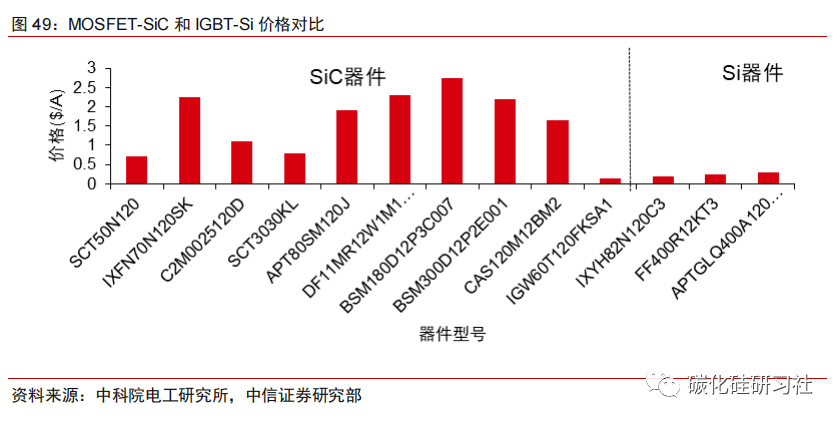
? 但 SiC 的高成本制約普及節奏,未來 SiC 與 Si-IGBT 可能同步發展,相互補充。與IGBT 相比,SiC 材料同樣存在亟待提升之處。 ? 1)目前 SiC 成品率低、成本高,是 IGBT的 4~8 倍; ? 2)SiC 和 SiO2 界面缺陷多,柵氧可靠性存在問題。受限于高成本,SiC 器件普及仍需時日,疊加部分應用場景更加看重穩定性,我們認為 SiC 在逐步滲透的過程中將與 Si-IGBT 一同成長,未來兩者均有廣闊的應用場景與增長空間。 ?
?
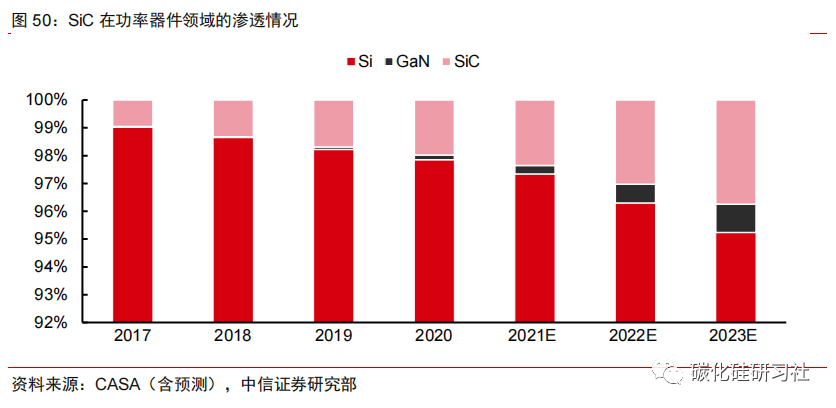
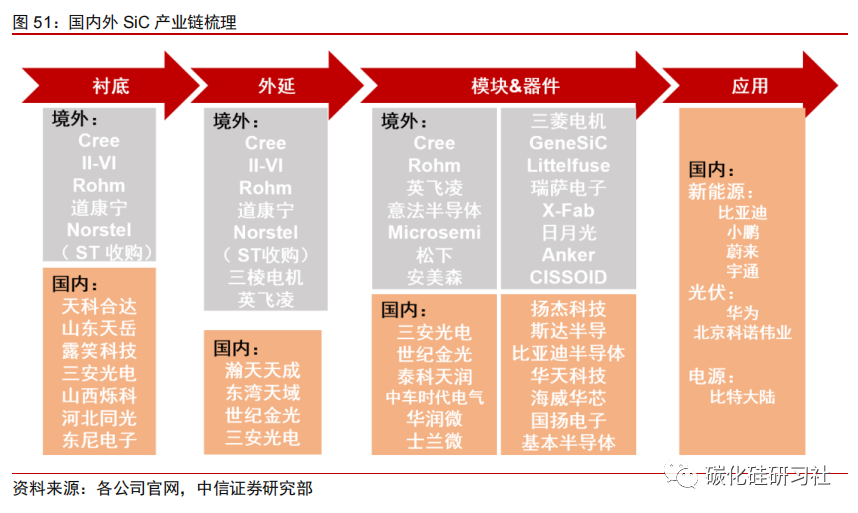
? 由于應用落地較慢,目前整個 SiC 市場仍處于發展階段,國外廠商占據主要份額。根據?Cree(現公司名為Wolfspeed)數據,2018 年全球 SiC 器件銷售額為 4.2 億美元,預計 2024 年銷售額將達 50 億美元。SiC 產業分鏈可分為襯底、外延、模組&器件、應用四大環節,意法半導體、英飛凌、Cree、Rohm 以及安森美等國外龍頭主要以?IDM?模式經營,覆蓋產業鏈所有環節,五家龍頭占據的市場份額分別為 40%、22%、14%、10%、7%。 ?
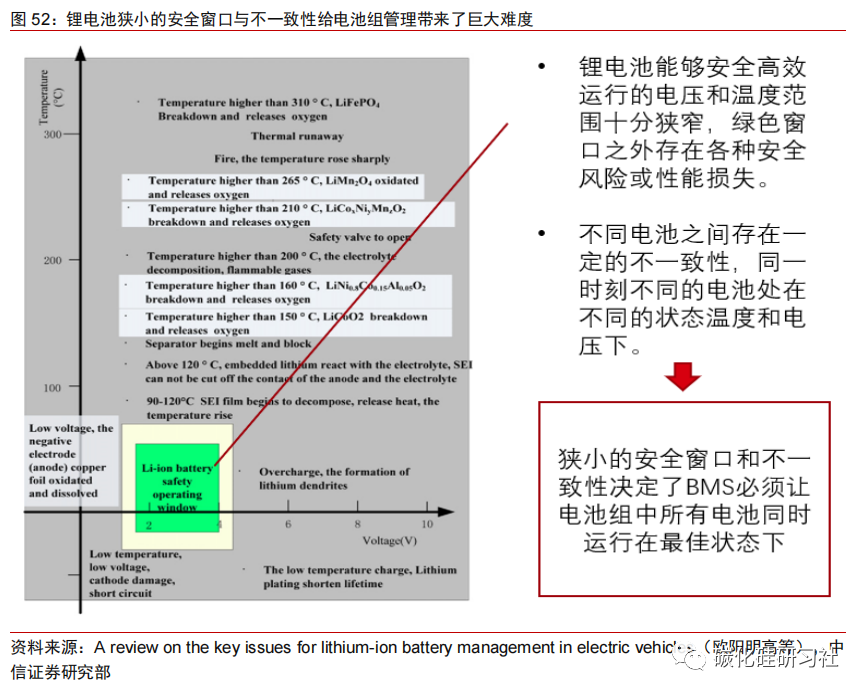
? 動力域:主從架構 BMS 為軀干,精細電池管理為核心 ? Model 3 作為電動車,電能和電池的管理十分重要,而負責管理電池組的 BMS 是一個高難度產品。BMS 最大的難點之一在于,鋰電池安全高效運行的條件是十分苛刻的。當今的鋰電池,無論正負極還是電解液都十分脆弱。正負極均為多孔材料,充放電時鋰離子就在正極和負極的孔隙中移動,導致正負極材料膨脹或收縮,當鋰電池電壓過高或過低,就意味著鋰離子過度集中在正負極其中之一,導致這一邊的電極過度膨脹而破碎,還容易產生鋰枝晶刺破電池結構,而另一邊的電極由于缺乏鋰離子支撐,會發生結構坍塌,如此正負極都會受到永久性損害。電解液和三元正極材料都對溫度比較敏感,溫度過高則容易發生分解和反應,乃至燃燒、爆炸。因此,使用鋰電池的前提就是確保其能工作在合適的溫度和電壓窗口下。如果以電壓為橫軸,溫度為縱軸繪制一張圖,這就意味著鋰電池必須運行在圖中一個較小的區域內。 ? BMS 的第二大難點在于,不同的鋰電池之間必然存在不一致性。這種不一致性就導致同一時間,在同一電池組內,不同的電池仍然工作在不同的溫度、電壓、電流下。如果繼續用一張圖來描述,就代表著不同電池處在圖上的不同位置。而要保證電池組的安全高效運行,就意味著諸多電池所在的點位必須同時處于狹小的安全窗口內,這就導致電池數量越多,管理就越困難。 ? 為了解決鋰電池運行的這一難題,就必須有可靠的 BMS 系統來對電池組進行監控和管理,讓不同電池的充放電速度和溫度趨于均衡。 ?
? 在諸多廠家的 BMS 中,特斯拉的 BMS 系統是復雜度和技術難度最高的之一,這主要是由于特斯拉獨特的大量小圓柱電池成組設計。 ? 為什么特斯拉選用難以控制的小圓柱電池?早在特斯拉成立的早期,日本廠商在18650 小圓柱電池上積累了豐富的經驗,一年出貨量達到幾十億節,因而這類電池一致性較好,有利于電池管理。因此特斯拉在model S 上選用了小圓柱電池。出于技術積累等方面的原因,特斯拉在 model 3 上使用了僅比 18650 略大的 2170 電池,并且至今還在使用圓柱形電池。 ? 由于特斯拉一直采用數量龐大的小圓柱電池來構造電池組,導致其 BMS 系統的復雜度較高。在 model S 時代,特斯拉全車使用了 7104 節電池,BMS 對其進行控制是需要一定軟件水平的。根據汽車電子工程師葉磊的表述,在 model S 當中,采用每 74 節電池并聯檢測一次電壓,每 444 節電池設置 2 個溫度探測點。從汽車電子工程師朱玉龍發布的model S 診斷界面圖也可以看出,整個電池組共有 16*6=96 個電壓采樣點,以及 32 個溫度采樣點。可以看到采樣的數據是很多的,需要管理的電池數量也為其增加了難度,最終BMS 將依據這些數據設置合理的控制策略。高復雜度的電池組也讓特斯拉在 BMS 領域積累了相當強的實力。與之相對,其他廠商的 BMS 復雜度就遠不如特斯拉高,例如大眾 MEB平臺的首款電動車 ID.3 采用最多 12 個電池組模塊,其電池管理算法相對會比較簡單。 ?

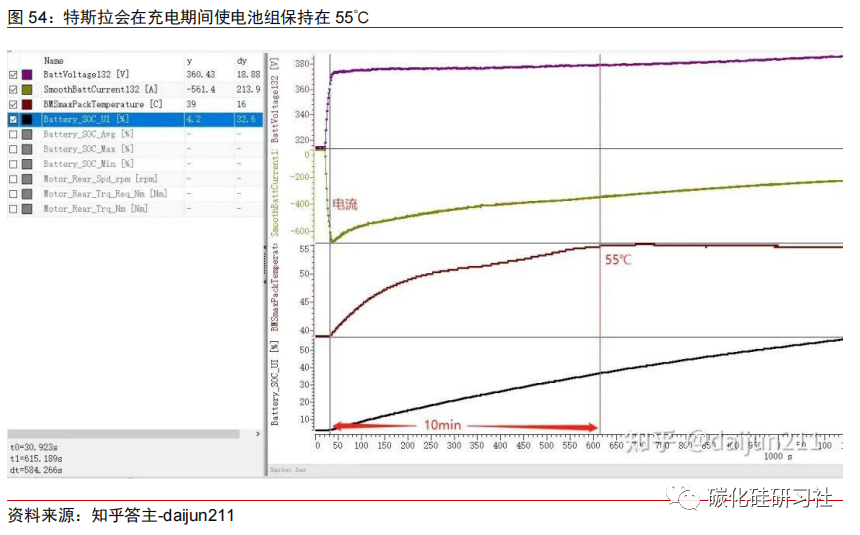
? 未來特斯拉的 BMS 是否會維持這樣的復雜度?從目前趨勢來看,隨著采用的電池越來越大,BMS 需要管理的電池數量是越來越少的,BMS 的難度也有所降低。比如從 model S 到 model 3,由于改用 2170 電池,電芯數量出現了較明顯的下降,長續航版電芯數量縮減到 4416 顆,中續航版 3648 顆,標準續航版 2976 顆。本次拆解的標準續航版配置 96個電壓采樣點,數量與 model S 相同,平均每 31 節電池并聯測量一個電壓值。整車 4 個電池組,每個都由 24 串 31 并的電池組組成,對電流均衡等方面提出了較高的要求。未來,隨著 4680 大圓柱電池的應用,單車電芯數量將進一步減少,有利于 BMS 更精確地進行控制,或許能夠進一步強化特斯拉的 BMS 表現。 ? 盡管面臨著最高的 BMS 技術難度,但特斯拉仍舊在這一領域做到優秀水準,而且還有超越其他公司的獨到之處。比如特斯拉在電池管理的思路方面顯得更加大膽,熱管理方面是一個典型體現。特斯拉會在充電期間啟動熱管理系統將電池加熱到 55 度的理論最佳溫度,并在此溫度下進行持續充電,相比而言,其他廠商往往更在意電池是否會過熱,不會采用此類策略,這更加顯現出特斯拉在 BMS 方面的實力。 ?
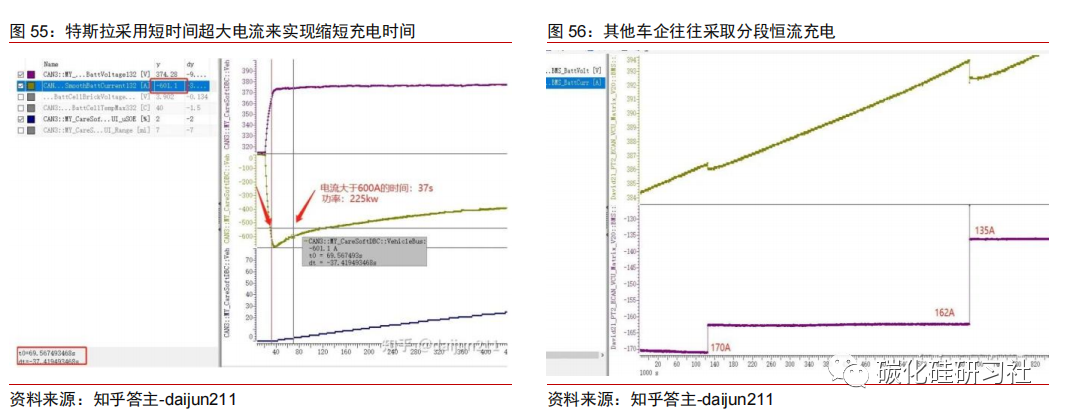
? 特斯拉在充電或電能利用方面的用戶體驗設計是其 BMS 系統的另一個獨到之處。比如特斯拉會用車身電池來使其他重要控制器實現“永不下電”,提高啟動速度,改善用戶體驗。充電時,特斯拉采取的策略也更加靈活,會在充電剛開始時將電流提高到極大的程度,迅速提升電池電量,隨后再逐漸減小充電電流到一個可以長期持續的水平,比如 model Y 可以在 40 秒內達到 600A 的超大電流充電(如圖中黃綠色線所示)。相比而言,一般的車企甚至消費電子廠商通常會用一個可以長期持續的電流進行恒流充電。考慮到車主有時需要在幾分鐘內迅速補充電池電量,特斯拉的這種策略無疑是更有優勢的,這也體現出特斯拉比傳統車企思路更靈活,更能產生創新。 ?
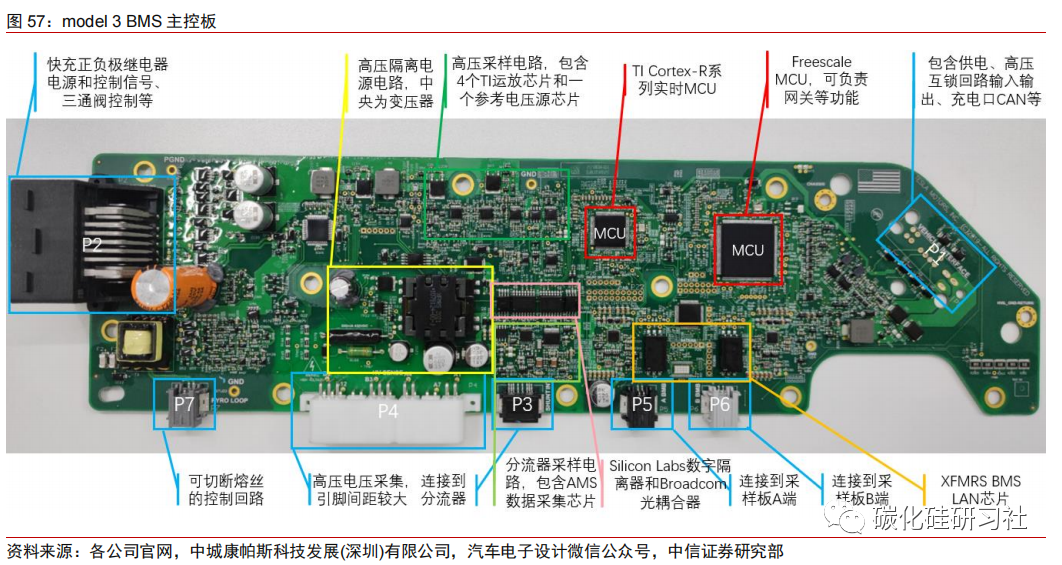
? 而具體如何實現這樣優秀的 BMS 功能?前文所說的種種 BMS 管理策略依賴于軟件,軟件的基礎在于特斯拉的 BMS硬件設計。特斯拉 model 3 的硬件設計包括了核心主控板、采樣板、能量轉換系統(PCS,由 OBC 和 DCDC 兩部分組成)以及位于充電口的充電控制單元。BMS 部分所有電路均覆蓋有透明三防漆以保護電路,導致電路元件外觀光滑且反光。 ? 主控板負責管理所有 BMS 相關芯片,共設置 7 組對外接口,包含了對充電控制器(CP)、能量轉換系統(PCS)的控制信號,以及到采樣板(BMB)的信號,另外還包含專門的電流電壓采集信號。電路板上包含高壓隔離電源、采樣電路等電路模塊。元器件方面,有Freescale 和 TI 的單片機,以及運放、參考電壓源、隔離器、數據采樣芯片等。 ?
? 在 BMS 的控制下,具體對電池組進行監測的是 BMB 電路板,對于特斯拉 model 3而言,共有 4 個電池組,每一組配備一個 BMB 電路板,并且 4 個電路板的電路布局各不相同,彼此之間可以很容易地利用電路板上的編號進行區別,并且按照順序用菊花鏈連接在一起,在 1 號板和 4 號板引出菊花鏈連接到主控板的 P5 和 P6 接口。我們本次拆解的model 3 單電機標準續航版電池組較短,沿著每個電池組都布置了一條 FPC(柔性電路板),并且在其沿線設置了對電池進行采樣的采樣點,每個采樣點都用藍色聚氨酯進行覆蓋保護,最后在 FPC 上方覆蓋淡黃色膠帶進行保護。需要注意的是,標準續航版盡管每個電池組仍有兩條淡黃色膠帶,但只有其中一條下面有 FPC,另一條僅起到對下方電池觸點的保護作用。而對于長續航版本,由于電池較多,每個電池組都需要分成兩條 FPC 進行采樣。 ?
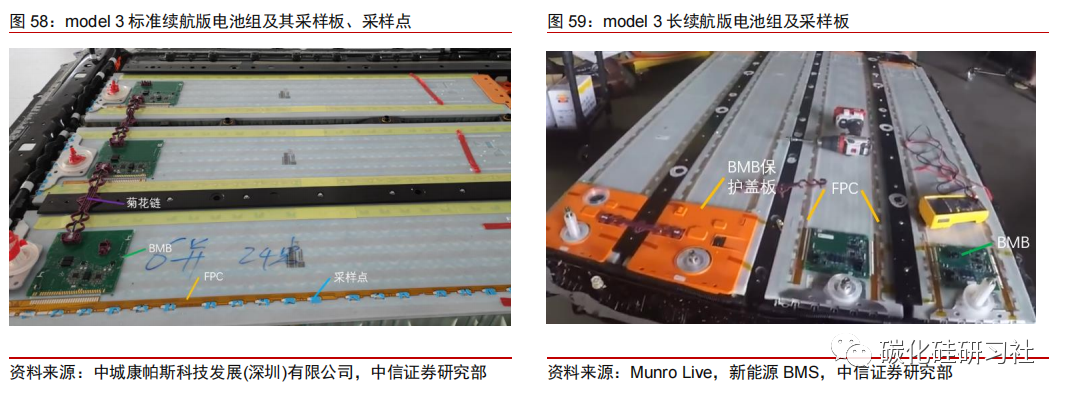
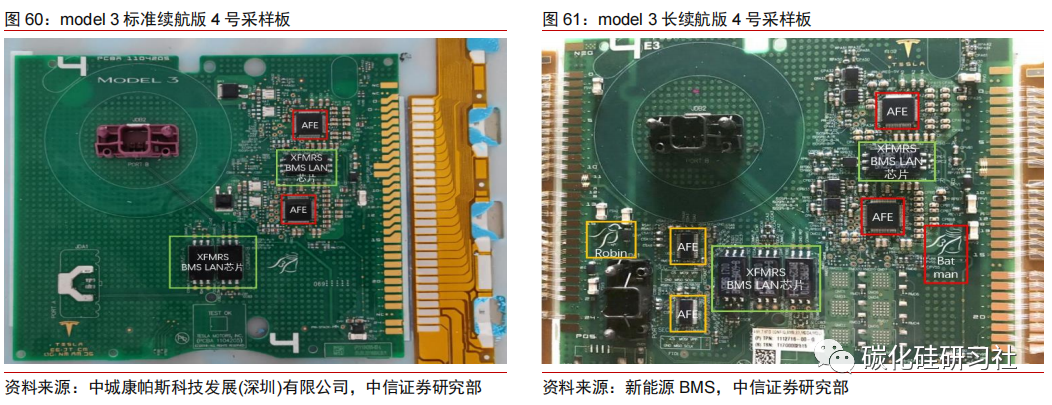
? 具體到 BMB 電路方面,標準續航版和長續航版也有所不同,我們以元器件較多的 4號采樣板為例進行說明。首先,在采樣點數量方面就有所不同,標準續航版共設置 24 個采樣點,因此 FPC 上有 24 個觸點與 BMB 進行對應。長續航版的電池組頂格設置,4 個電池組當中,中間兩組較長,左右各設置 25 個采樣點,共 50 個,兩邊的電池組略短一些,共設置 47 個采樣點,一側 24 個,另一側 23 個,因此長續航版的 BMB 需要在兩側都設置觸點。 ? 其次,電路布置和元器件數量也有較大不同。經過觸點傳來的信號需要由 AFE(模擬前端)芯片進行處理,這是整個 BMB 電路的核心。標準續航版每個 BMB 有兩顆定制的AFE 芯片,其配置有些類似 Linear Technology(ADI)的 LTC6813 芯片但不完全相同,同時配置了 3 顆 XFMRS 的 BMS LAN 芯片用于與其他電路板的信號傳輸。長續航版 BMB由于兩側均有觸點,信號數量較多,因此為每個 AFE 另外配置了兩顆簡化版的 AFE 芯片(圖中橙色長方形),用來輔助信號處理。同時 BMS LAN 芯片的數量也增加了 1 顆。 ?
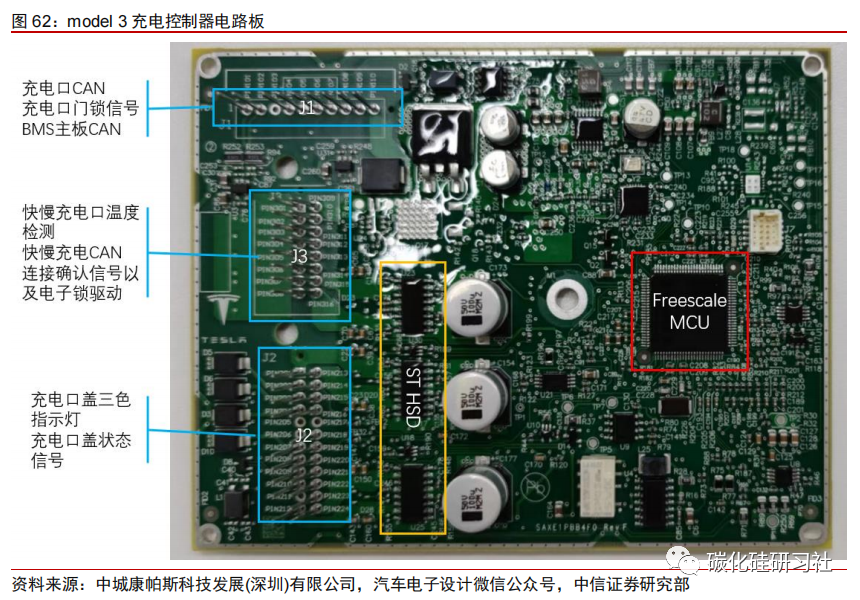
? BMS 體系的另一個重要組成部分是充電控制,特斯拉為此開發了充電控制器,位于左后翼子板充電口附近。該控制器有三個對外接口,負責控制充電口蓋、充電槍連接狀態與鎖定、充電信號燈、快慢充控制及過熱檢測等。電路方面則包括了 Freescale 的 MCU 和ST 的 HSD 芯片等。 ?
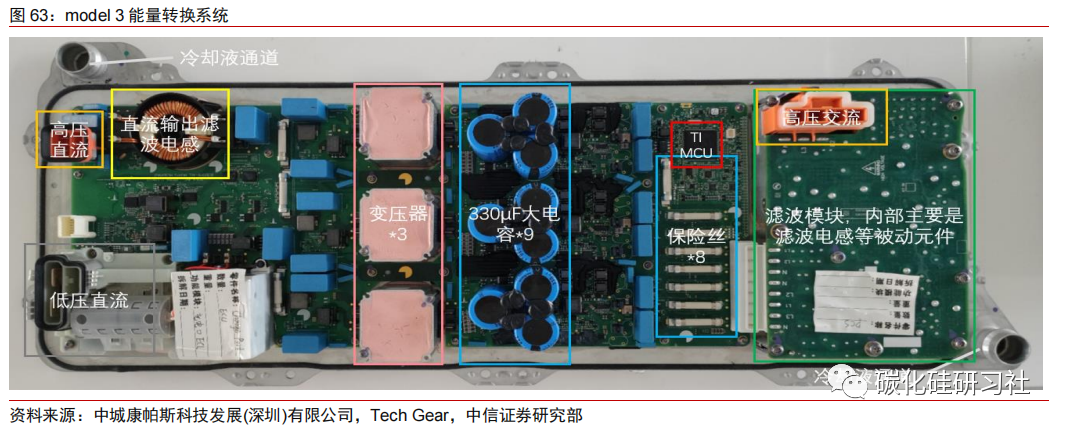
? BMS 還有一個重要功能就是電能轉換,包括將高壓直流電轉化成低壓直流電來供給車內設備,或者將高壓交流電轉化為高壓直流電用于充電等,這一部分是通過能量轉換系統(PCS,也稱高壓配電盒)完成的。PCS 包括兩個主要部分,分別是將交流電轉化成直流電的 OBC(車載充電器,On Board Charger)和進行直流電壓變換的 DCDC。這部分電路中主要是各種大電容和大電感,也包含了整車中十分罕見的保險絲。 ?
? 從元器件層面來看BMS系統,最核心的主要就是AFE芯片和各類功率器件/被動元件。其中 AFE 芯片領域,國內最主流的是三家美國公司產品,Linear Technology(被 ADI 收購)、Maxim(被 ADI 收購)、TI,所以其實還是歸結于全球最大的兩家模擬芯片公司。此外 NXP/Freescale、Intersil 等大型廠商也有一定份額。隨著國內產業發展,國產 AFE 芯片通道數和產品穩定性逐漸提高,也有望獲得發展空間。功率器件方面,我國產業已經有一定市場地位,在汽車領域仍可以進一步突破。 ? 從電路和系統層面來看,依據汽車電子工程師朱玉龍的說法,BMS 真正的核心價值,其實是在電池的測試,評價,建模和后續的算法。整個 EE 的軟硬件架構,已經基本是紅海,未來產業不需要大量的 BMS 公司,長久來看還是電池廠商和車廠能夠在 BMS 領域獲得較高的地位。隨著汽車產業崛起,未來我國電動汽車廠商在 BMS 領域也有望獲得更深厚的積累。 審核編輯:黃飛
?
















 工商網監
工商網監
評論