 電子發燒友App
電子發燒友App


轉向系統是汽車重要的組成部分,也是人與汽車之間的重要連接工具,它隨著汽車整體的發展和新技術的出現而推陳出新,從剛開始的機械轉向、機械式液壓助力轉向HPS、電液助力轉向EHPS、電動助力轉向EPS,以及當前最新的線控轉向SBW。
今天要聊的是電動助力轉向系統EPS,1988年2月日本鈴木公司首次在其Cervo 車上裝備汽車電動助力轉向。在此之后,電動助力轉向技術迅速發展。大發、三菱、本田、德爾福汽車系統公司先后研制出電動助力轉向系統并裝配在其產品上。當前電動助力轉向在車上已經非常普遍了。下面會從電助力轉向系統的工作原理、EPS控制單元測試、EPS冗余三方面來梳理。
01.
系統組成及工作原理
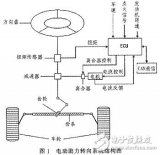
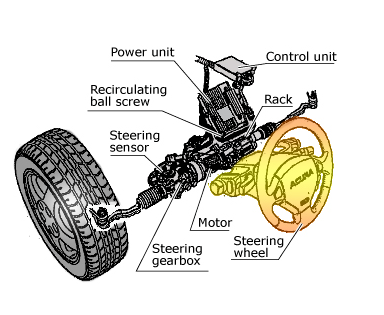
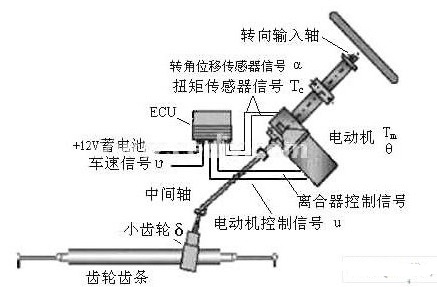
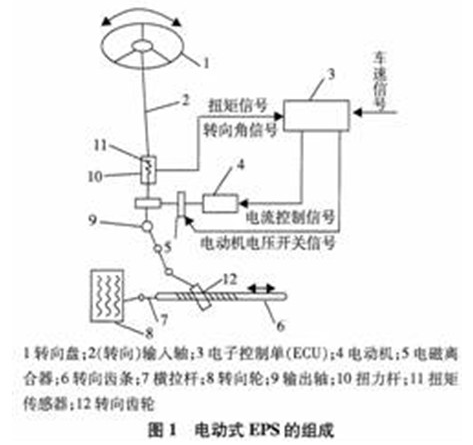
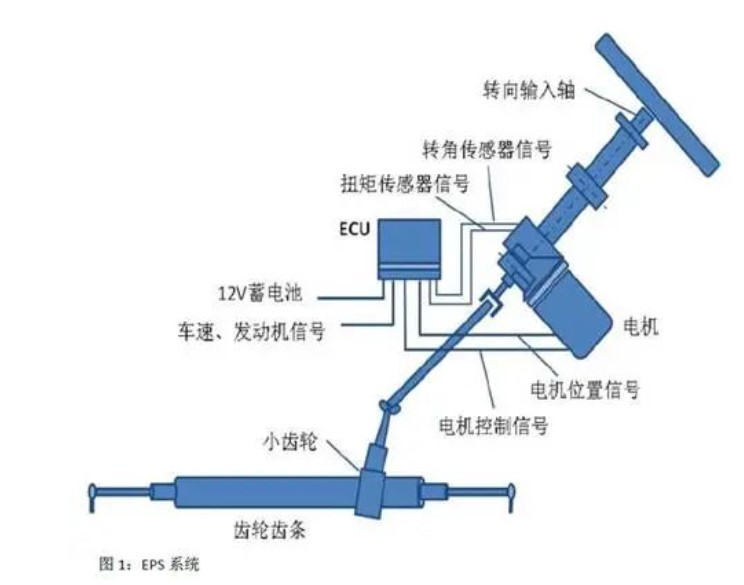
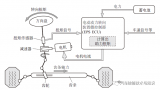
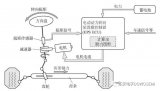
電助力轉向系統EPS由機械轉向系統、方向盤扭矩傳感器、車速傳感器、電子控制單元(ECU)、電機和減速機構等組成,如下圖所示。
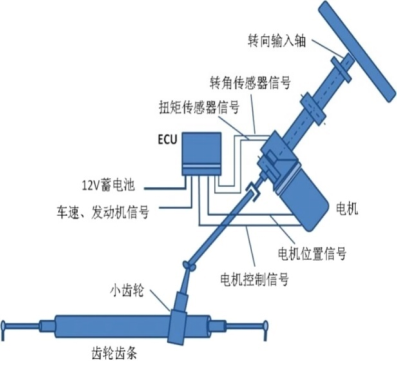
▲?EPS系統組成簡圖
其中轉角傳感器用于實時檢測轉向盤的轉動方向以及轉向盤的位置,轉矩傳感器用于實時檢測轉向盤轉矩大小并將信號輸送到EPS控制單元。轉角、轉矩傳感器的精度決定了電動助力轉向系統的性能可靠性。
車速傳感器用來測量車速的大小。車速傳感器一般采用電磁感應式傳感器安裝在變速箱上。該傳感器根據車速的變化把主副兩個系統的脈沖信號傳送給ECU。
助力電動機的特性直接影響到EPS系統控制的難易程度和駕駛員的手感。EPS系統對助力電動機的基本要求是:應具有高可靠性、大功率、低噪聲和振動,較低的摩擦轉矩、較小的體積和重量;能夠在堵轉下輸出轉矩;有良好的機械特性,在工作過程中轉矩波動盡量要小;轉動慣量盡可能小;應能快速反轉。
目前 EPS系統的助力電動機通常有永磁直流電動機、直流無刷電動機和開關磁阻電動機等。直流有刷電動機技術成熟、控制器簡單、成本低、但存在電刷易磨損、功率密度低、由換向器的電火花產生的電磁干擾等缺點。直流無刷電動機采用電子換向、減少了換向時的電火花,不需要經常維護以及具有較高的效率和功率密度而受到越來越多的關注。
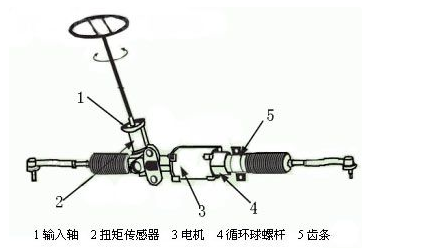
減速機構與電動機相連,起減速增扭作用。EPS系統的減速機構常采用蝸輪蝸桿機構、循環球螺桿螺母、行星齒輪機構等。為了保證EPS系統只在預先設定的車速范圍內起作用,有的 EPS系統還配用離合器。當車速達到某一值時離合器分離,電動機停止工作,轉向系統轉為手動轉向。另外當電動機發生故障時離合器將自動分離。
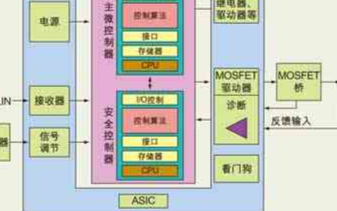
ECU的功能是根據轉向盤轉角、轉矩和車速信號進行邏輯分析與計算后,發出指令控制助力電動機的動作。此外ECU還有安全保護和自我診斷功能。ECU通過采集電動機的電流、發電機電壓、發動機工況等信號判斷其系統工作狀況是否正常,一旦系統工作異常,助力將自動取消,同時ECU將進行故障診斷分析。
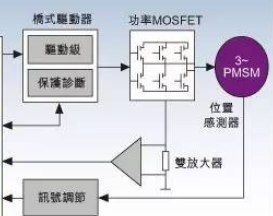
整個系統的工作原題大致為:ECU根據扭矩傳感器、轉角傳感器的信號以及通訊總線發來的車速等其他信息決定電機的轉動方向和最佳助力扭矩,向電機發出控制信號,通過功率驅動電路控制電機的轉動,電機的輸出經過減速機構減速增扭后,驅動齒輪齒條機構,產生相應的轉向助力。通過精確的控制算法,可改變電機的扭矩,使傳動機構獲得所需的助力值。
由于轉矩傳感器與轉向軸連接在一起,當轉向軸轉動時,轉矩傳感器開始工作,把輸入軸和輸出軸在扭桿作用下產生的相對轉動角位移變成電信號傳給ECU,ECU根據車速傳感器和轉矩傳感器的信號決定電動機的旋轉方向和助力電流的大小,從而完成實時控制助力轉向。因此它可以很容易地實現在車速不同時提供電動機不同的助力效果,保證汽車在低速轉向行駛時輕便靈活,高速轉向行駛時穩定可靠。
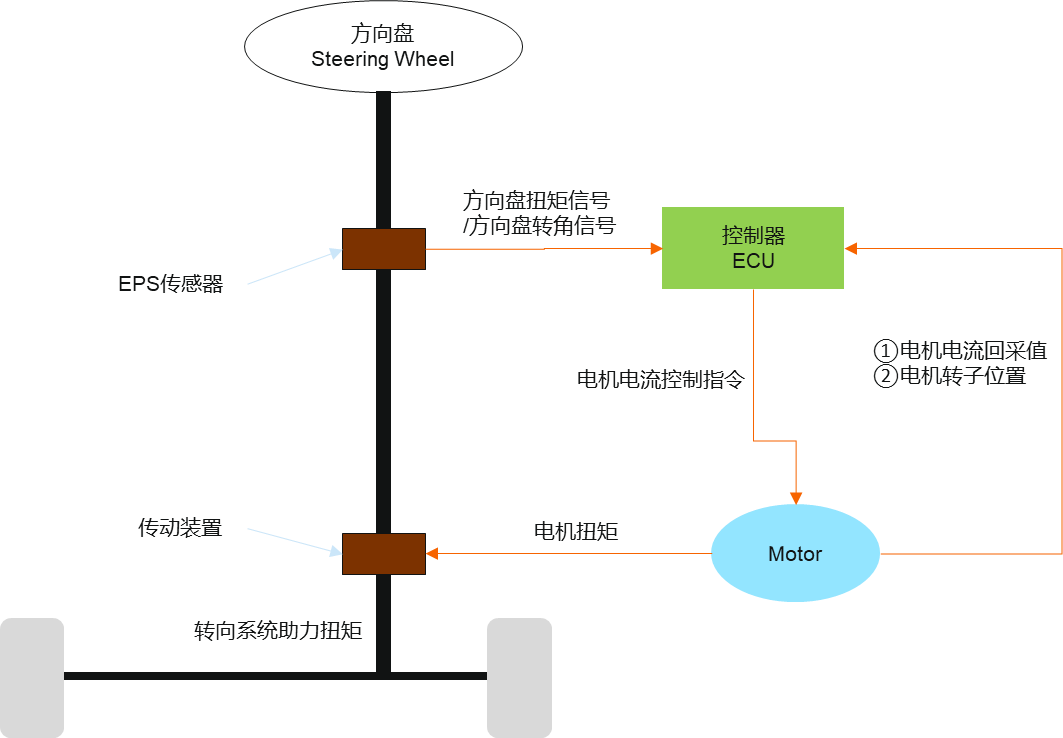
▲?EPS控制簡要原理圖(來源:汽車電子與軟件)
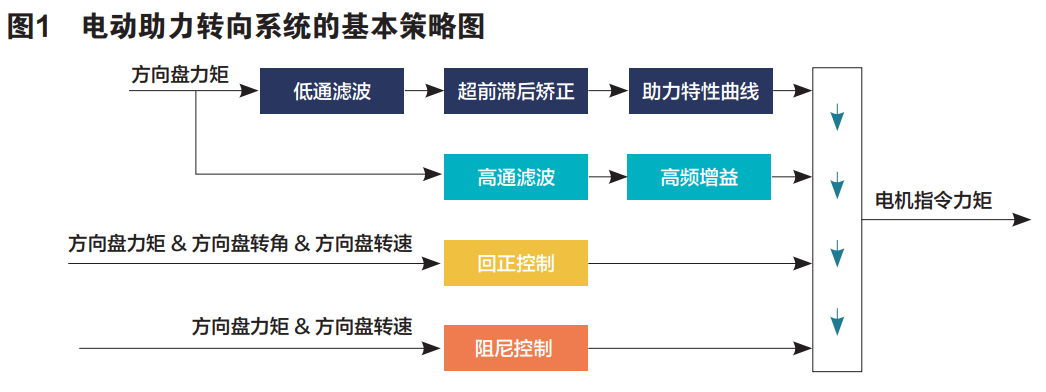
▲?EPS系統控制策略簡圖
02.
整體來說,還是幾家主要的MCU廠商提供的方案,包括ST、英飛凌、瑞薩。
首先看看ST的EPS方案,其由 ST 車規級 32-bit PowerPC 架構的微處理器 SPC560P50 以及6路MOS驅動IC L9908和車規級MOS組成。方案適合12V、24V、48V系統,同時也具備相應的診斷保護功能。
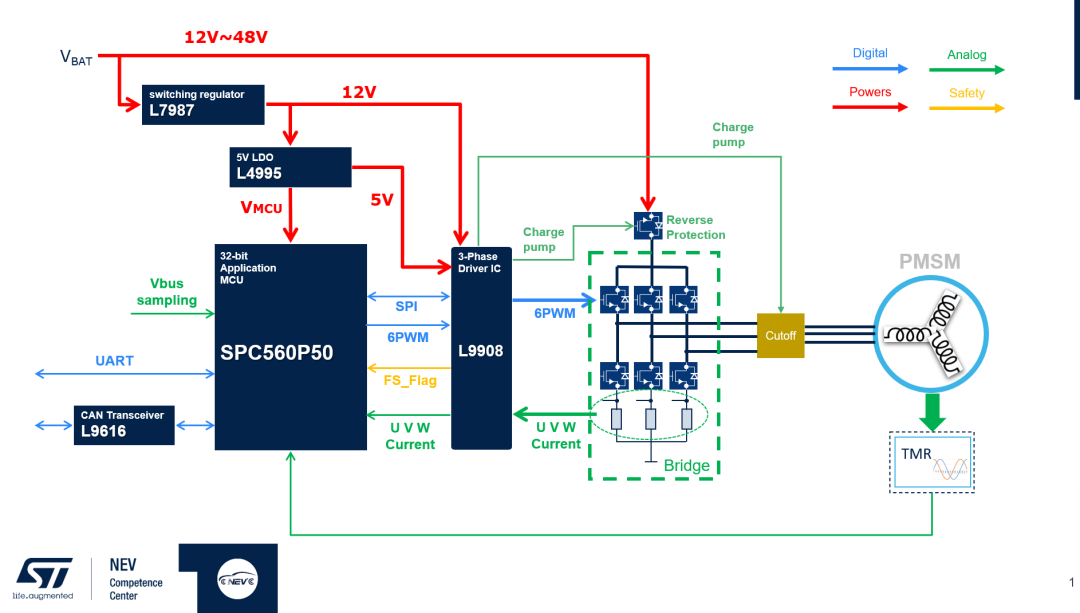
▲ ST系統框圖
SPC560P50擁有適合于電機開發的FlexPWM以及適配CTU的ADC模塊,支持高達64MHz主頻的內核更能保證應用資源的需求。
驅動IC L9908支持三路ADC采樣以及6路MOS驅動的輸出,擁有能讀取全故障列表的SPI接口,更適合于標準的三相永磁同步電機方案的開發。
該方案的軟件基于ST的SPC5Studio與MCTK(電機控制套件)開發,其中免費的IDE SPC5Studio 提供MCU的各種外設支持,成熟的MCTK平臺也提供了各種用于電機控制的接口,可幫助客戶減少底層開發周期,并且用于快速系統調試。
電機控制工具套件的關鍵特點:
符合AEC-Q100
120MHz Flex PWM模塊
通過SPC5Studio插件配置SPC5 FOC Lib
實現FOC控制的嵌入式軟件庫(SPC5-MCTK-LIB)
SPC560P + L9908板
帶感應/無感應器的BLDC電機
下面是英飛凌的EPS解決方案,其中主控芯片Tricore的TC33X或TC36X,PMIC為大家熟知的TLF35584,轉矩傳感器為TLE499X,三相驅動芯片為TLE9180等,整體方案如下圖所示。
該方案提供獨具特色的故障運行EPS芯片組,且均經過驗證。不同于獨立的解決方案,經過校準的芯片組能夠減少開發工作量。降低BOM材料成本,且支持擴展,適用于不同車型和駕駛模式。
系統特定:
功能強大、可擴展、體積小
經認證的互操作性
EPS系統支持基于nx3 相的故障安全和故障運行
可通過軟件進行調整:適用于多種駕駛模式和車型
支持升級,以滿足未來需求,如自動駕駛的線控轉向
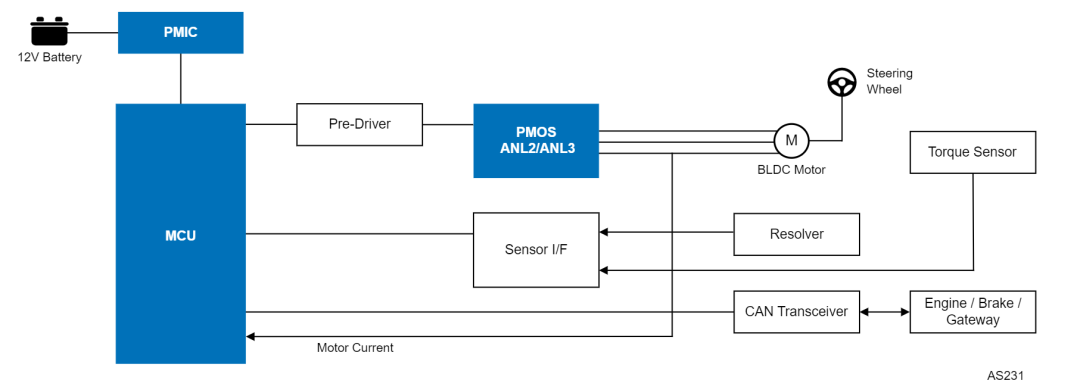
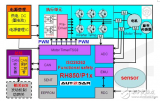
瑞薩提供的方案主要基于自己的?RH850/P1x以及RAA270005 PMIC來設計,總體方案如下圖所示。
03.
冗余方案
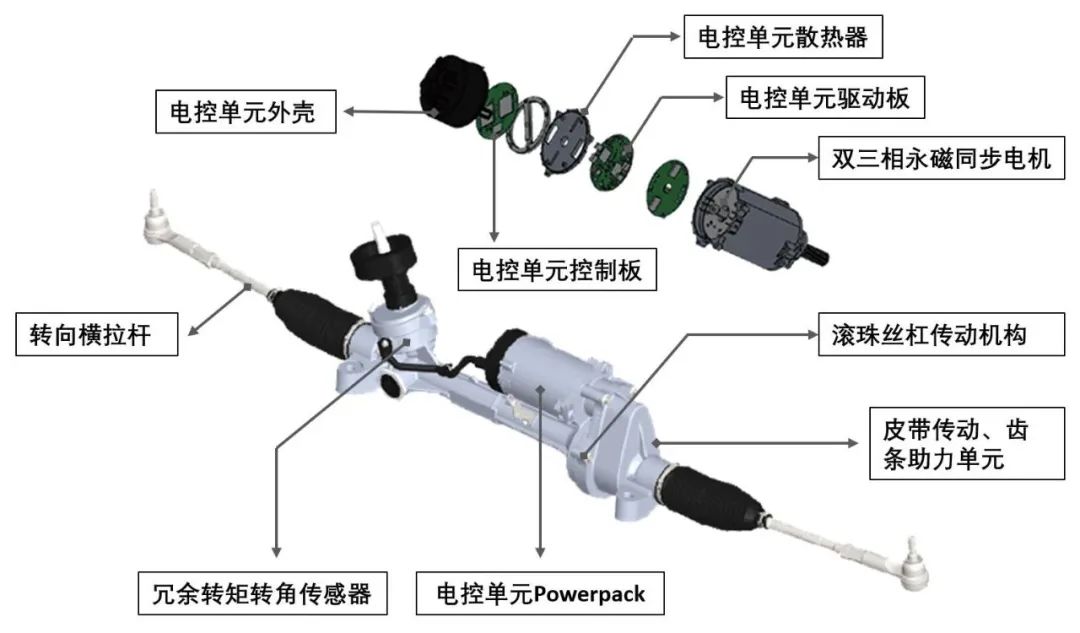
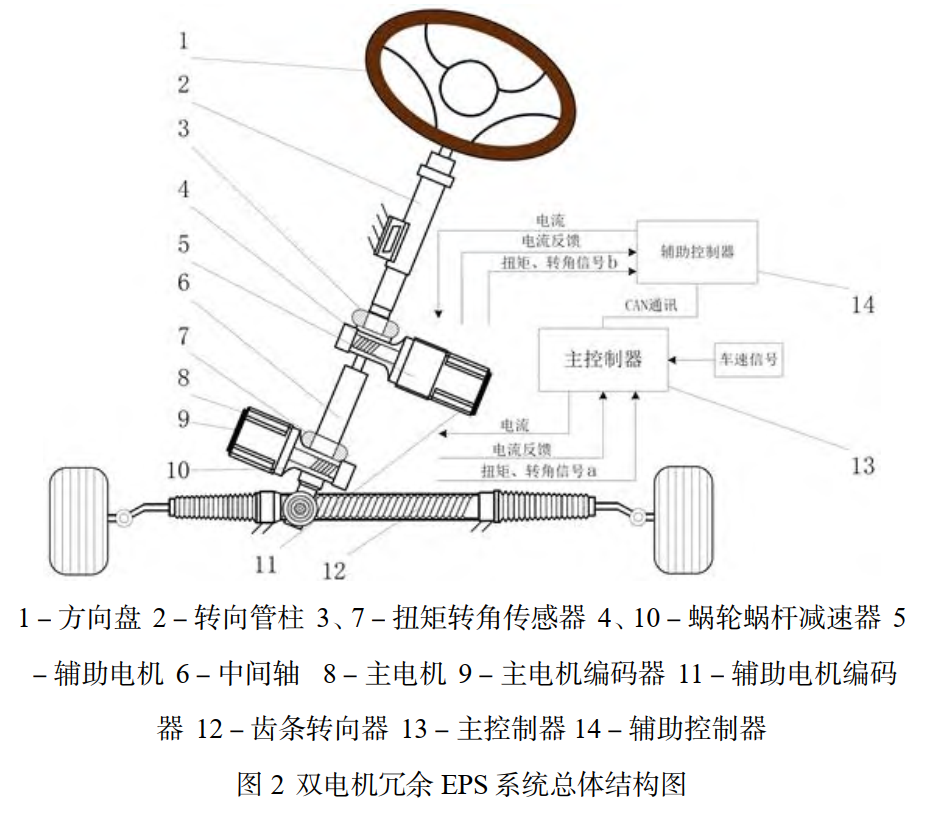
冗余,意味著備份,首先是硬件層面,包括冗余傳感器,主流的冗余傳感器通常提供4路轉矩信號和2路轉角信號,ECU是冗余EPS的核心部分,由助力電機以及驅動和控制單元組成,助力電機通常采用六相或十二相無刷直流電機,由于單點失效導致其中三相無法正常驅動時,剩余部分仍可正常工作。該方案中ECU僅有一個。
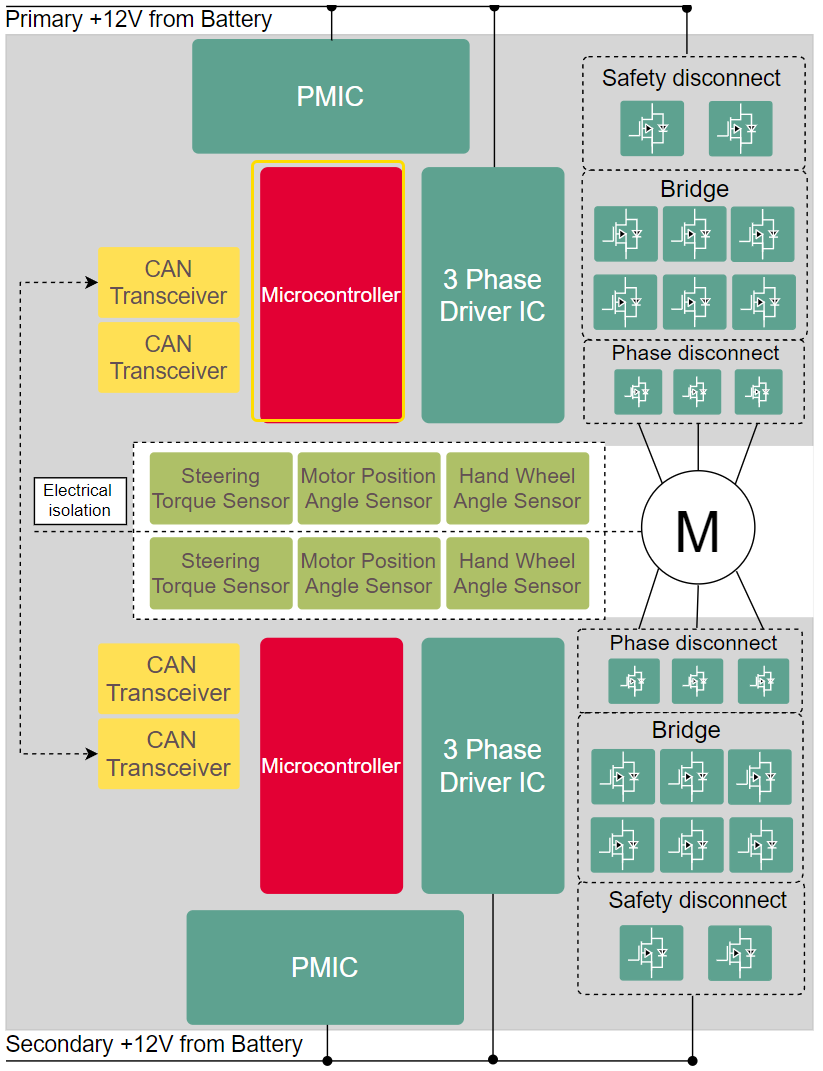
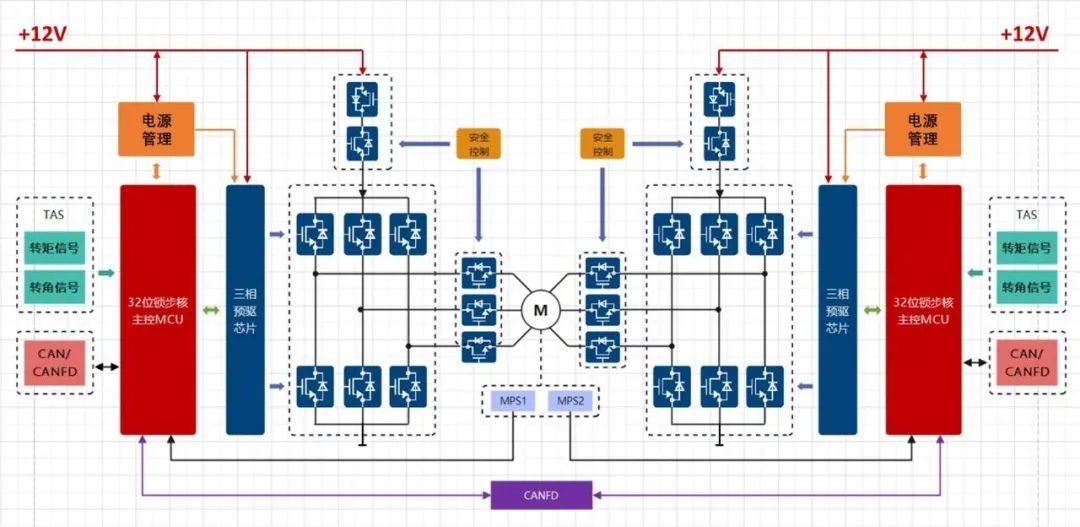
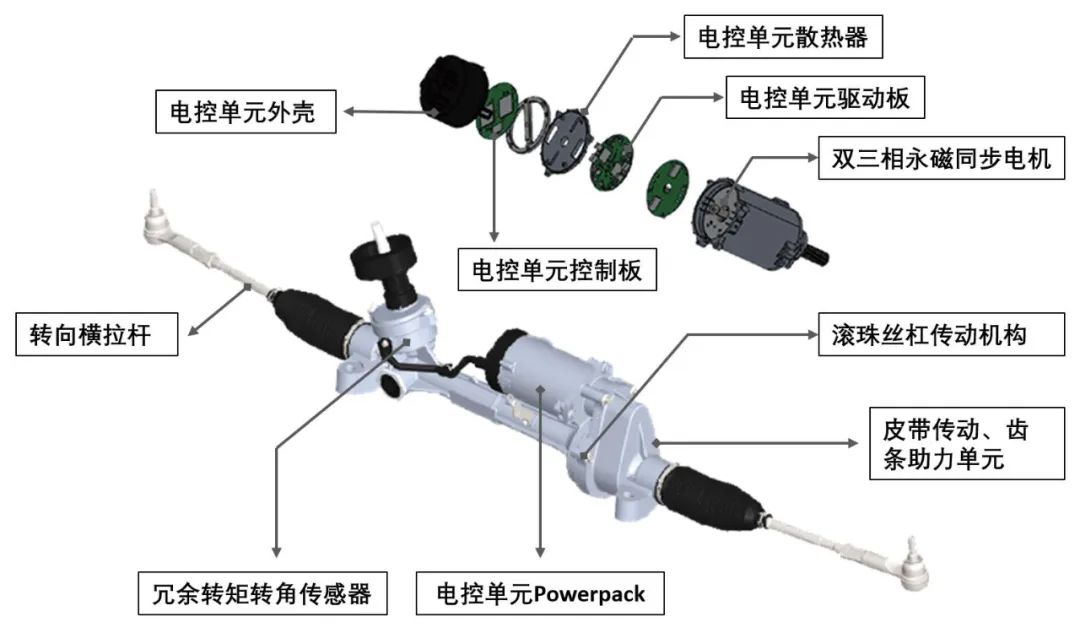
另外一個方案為?基于雙三相無刷直流電機的全冗余電控方案,整個方案采用了雙路獨立外部供電、雙路外部CAN/CANFD通信以及冗余的轉矩、轉角傳感器信號。電機驅動單元、電機位置傳感器、電源管理單元、主控MCU也都采用了雙備份的冗余架構。雙MCU之間采用CANFD通信,實現信號交互、力矩指令傳遞、故障診斷信號交互等,可以起到相互監控的作用,必要時支持主輔切換,提升了整個系統的安全性和可靠性。
最后除了將ECU、傳感器做冗余外,還有業內人士提出了一種帶電機冗余的方案,如下圖所示,除了機械部分外,其他均有冗余,該方案從復雜程度、以及方案成本來說,都是最高的。
04.
EPS控制器測試
電子轉向系統作為車內最重要的系統之一,其安全性至關重要,除了從方案上保證安全外,還需要測試來進行驗收閉環,下面來看看EPS ECU硬件測試項,主要分為電壓類測試、電流類測試、EMC測試、環境類測試、機械類測試、其它類測試等。
1.?電壓測試
運行電壓測試
測試條件:在室溫、基本性能測試使用的電源電壓分別為 9± 0.1V、14±0.1V和 16±0.1V。
滿足條件:在電源電壓為 12V 時,測量電子設備的暗電流,它應該小于0.3mA;在電源電壓為 6V 并且點火時,CAN 通信應可用。
反極性測試
測試條件:測試電壓:-18±0.2 V;測試時間:5±0.5 min;計數:兩次間隔5min;測試模式休眠模式,該被測設備應在無工作負荷下運行,僅僅可用于無電機電流的通信。
滿足條件:測試期間,不應存在損壞零件;測試后,被測設備的所有功能在測試期間或之后按照設計來執行。不允許故障碼。
過壓測試
測試條件:測試步驟如下表所示,測試模式為休眠模式。
?
| 區域 | 測試電壓 | 測試時間 | 溫度 | 重復性 |
| 試驗1 | 18±0.2V | 60min | 65℃ | 1 |
| 試驗2 | 24±0.2V | 1min | 室溫 | 2(5min間隔) |
?
滿足條件:測試完成后,被測設備的一個或多個功能在測試時不按設計來執行,但會在測試之后自動恢復到正常運行。不允許未定義的功能。允許存儲記憶功能。
電源電壓變化測試
測試條件:電壓變化如圖所示,測試循環大于10個波形周期,測試模式為休眠模式。
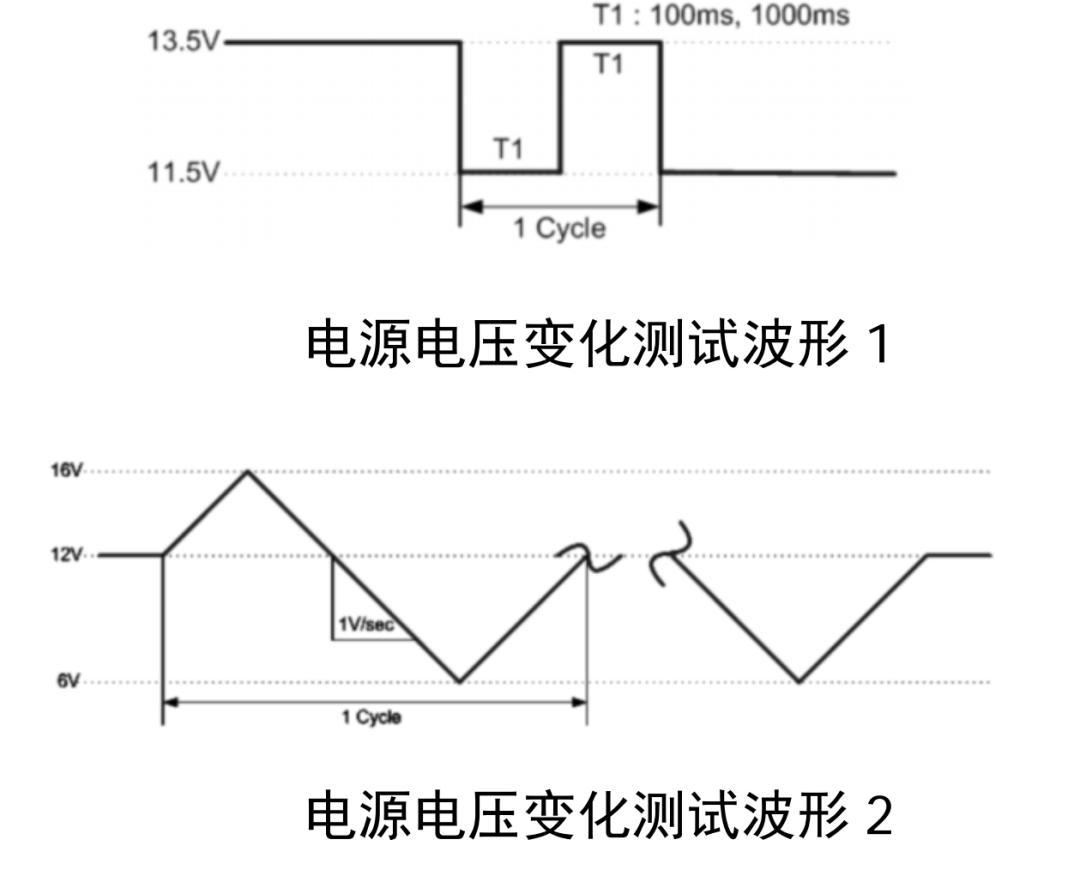
滿足條件:在測試波形 2 中,如果狀態變為停止活動,記錄該現象,并重新啟動測試;在測試期間和測試后,被測設備的一個或多個功能在測試時不按設計來執行,但會在測試之后自動恢復到正常運行。不允許未定義的功能。允許存儲記憶功能。
2.電流類測試
暗電流測試
測試條件:測試電壓:12.0±0.1V;測試模式為OFF模式。
滿足條件:最大允許暗電流為 0.3mA;測試后,被測設備的所有功能在測試期間或之后按照設計來執行。不允許故障碼。
短路測試
測試條件:測試電壓:12.0±0.1V,測試方式分別為接地短路測試,電池短路測試,測試時間為5min/次,測試模式為休眠模式。
滿足條件:被測設備的一個或多個功能在測試期間不按照設計執行并且在測試后不會恢復到正常運行狀態;輸出端應確保能經得住短路電流并且在熔斷器重置后能恢復到正常狀態。
上電/斷電測試
測試條件:測試分為上下電和KL15 ON/OFF兩種測試場景,對于電池上下電測試方式如下,其中T1為10ms或50ms,對于KL15 ON/OFF,T1 0.5/1/2/3s,測試周期為10。
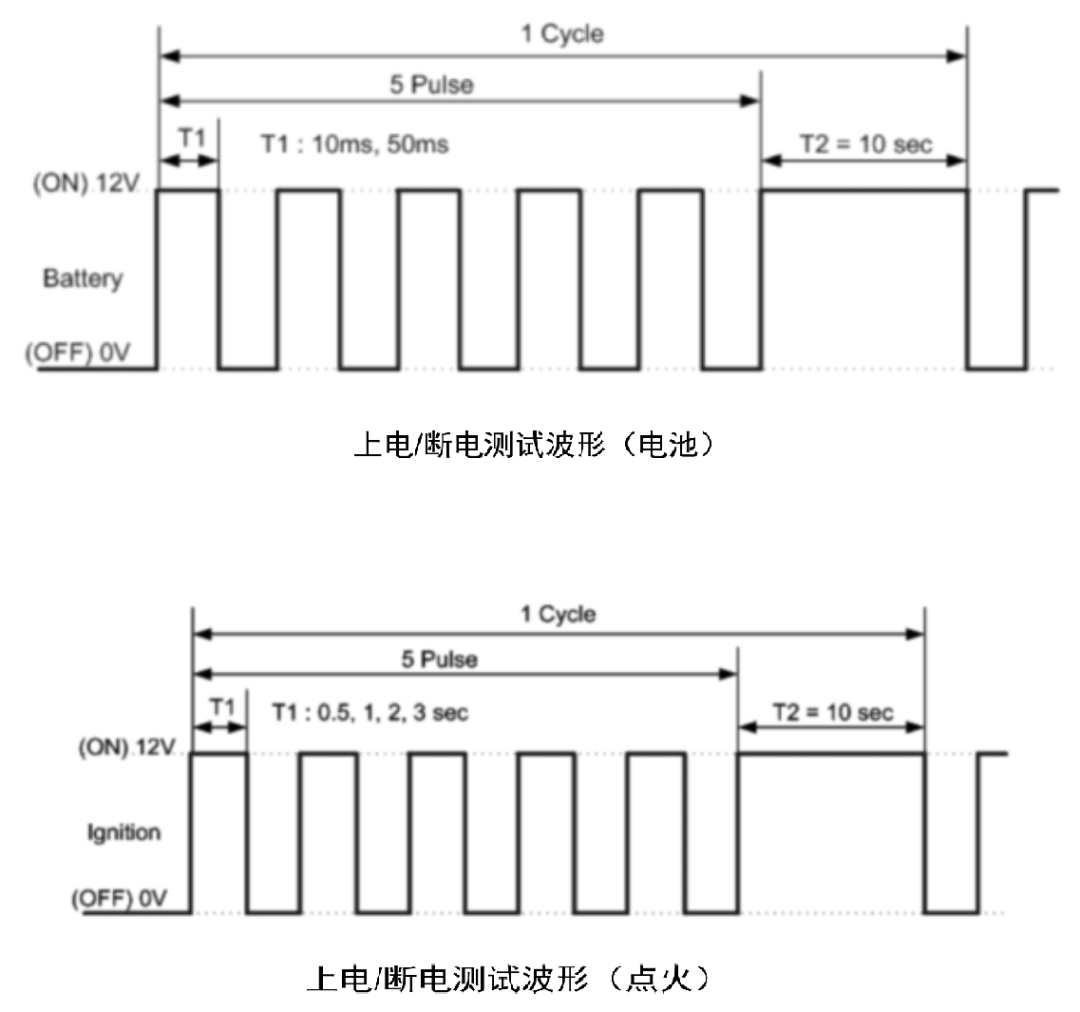
滿足條件:被測設備的一個或多個功能在測試期間不按照設計執行并且在測試后不會恢復到正常運行狀態;輸出端應確保能經得住短路電流并且在熔斷器重置后能恢復到正常狀態。
3.EMC測試
輻射抗擾度測試
測試條件:步長不大于表中明確規定的長度;駐留時間:2 s;測試頻率特征①C.W;②正弦波振幅(AM)為 1kHz,正弦波的80%處,調制指數m=0.8;③t 大于 577us 且周期為4600 us 時的正弦波脈沖調制(PM 近似于 GSM);RI 測試頻率:80MHz 到 2000MHz,BCI 測試頻率:20 MHz 到 400 MHz,其他測試條件和設置可參考ISO11452-2 和 11452-4。
?
| 頻率范圍(MHz) | 步長(MHz) | 調制 |
| 20-200 | 5 | CW,AM |
| 200-400 | 10 | CW,AM |
| 4200-800 | 20 | CW,AM |
| 800-1000 | 20 | CW,AM,PM |
| 1000-2000 | 20 | CW,AM |
?
滿足條件:測試設備滿足如下測試極限:
?
| 項目 | 域 | 標準 |
| RI | 60V/m | 被測設備的所有功能在測試期間或之后按照設計來執行。不允許故障碼。 |
| 80V/m | 被測設備的所有功能在測試期間按照設計來執行。然而,其中一個或多個可能會超出指定的限度。所有功能在測試后自動恢復到正常限制內。 | |
| 100V/m | 被測設備的所有功能在測試期間按照設計來執行。然而,其中一個或多個可能會超出指定的限度。所有功能在測試后自動恢復到正常限制內。 |
| 項目 | 域 | 標準 |
| BCI | 80mA | 被測設備的所有功能在測試期間或之后按照設計來執行。不允許故障碼。 |
| ? | 100mA | 被測設備的所有功能在測試期間按照設計來執行。然而,其中一個或多個可能會超出指定的限度。所有功能在測試后自動恢復到正常限制內。 |
?
4.環境類測試
高溫工作測試
測試條件:將樣件放在85±3℃條件下1±0.5h之后;測試時間:168h;重復以下休眠模式10min;被測設備無操作電壓,同整車狀態完整的線束模式50 min;12.0 ±0.2v;再放置在正常溫度下 2h,然后進行基本功能測試。
滿足條件:在測試期間和測試之后,被測設備的一個或多個功能在測試期間不
按照設計執行并且在測試后不會恢復到正常運行狀態。
低溫工作測試
測試條件:將樣件放置在(-30±3)℃環境下1±0.5h之后;測試時間:168 h;重復以下測試模式;休眠模式10 min,同整車狀態完整的線束模式50 min;12.0?±0.2v;再放置在正常溫度下 2h,然后進行基本功能測試。?若離開室溫后出現問題, 需拆解以觀察是否有明顯缺陷。
滿足條件:在測試期間和測試之后,被測設備的所有功能在測試期間或之后按照設計來執行,不允許故障碼;且無外部應變或損壞。
低溫操作測試
測試條件:將樣件放置在(-30±3)℃環境下1±0.5h之后;測試時間:168 h;重復以下測試模式;休眠模式10 min,同整車狀態完整的線束模式50 min;12.0?±0.2v;再放置在正常溫度下 2h,然后進行基本功能測試。
滿足條件:在測試期間和測試之后,被測設備的所有功能在測試期間或之后按照設計來執行,不允許故障碼;且無外部應變或損壞。
恒定濕熱測試
測試條件:將被測件暴露于溫度 85±3℃、濕度 93%±3%[RH] 的環境下 21 天;?測試模式為休眠模式,但測試期間的最后一個小時需將被測件?調整到滿足條件運行模式。
滿足條件:在測試期間和測試之后,被測設備的所有功能在測試期間或之后按照設計來執行,不允許故障碼;當測試結束后,將樣件置于常溫下 2 小時并去除水分,然后進行基本操作測試。
5.機械測試
機械沖擊測試
將被測件按實車位置安裝,按照下表數據進行測試。
?
| 條件 | 值 |
| 加速度 | 峰值250±25m/s2 |
| 時間 | 10ms |
| 方向 | 前、后、左、右、上、下 |
| 沖擊次數 | 每個方向400次 |
?
滿足條件:在測試期間和測試之后,被測設備的所有功能在測試期間或之后按照設計來執行,不允許故障碼;且無外部應變或損壞。無外部應變或損壞。
6.自由落體/墜落測試
測試條件:墜落高度:被測件從 1m高處自由墜落到混凝土或鋼鐵的表面;墜落次數:每個樣件測試兩次;墜落的方向:第二次自由墜落的方向和第一次相反,但除了連接器的那一面。
滿足條件:如果有外部應變或損壞,DUT 不通過功能測試;如果沒有外部應變或損壞,在測試期間和測試之后,被測設備的所有功能在測試期間或之后按照設計來執行,不允許故障碼;且無外部應變或損壞。無外部應變或損壞。
除了以上測試外,耐化學測試、氣體腐蝕測試、電池充放電測試、拋負載測試、24V 電壓啟動車輛測試,就不一一贅述了。
審核編輯:黃飛
?




















 工商網監
工商網監
評論