三軸加速度傳感器MMA7260Q可以測量智能車慣性大小,選取最佳重心位置,并能準(zhǔn)確定位智能車處于直線、彎道、坡道、漂移等運(yùn)行狀態(tài);利用加速度傳感器能夠提前預(yù)測路徑,并判斷何時剎車效果最佳。并且很好的解決了在直立行走車模的平衡與方向識別。
2013-07-02 17:01:39 9514
9514 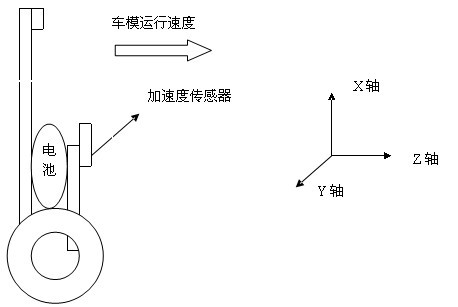
體設(shè)計,主要包括主體設(shè)計思路、系統(tǒng)結(jié)構(gòu)、機(jī)械部分及安裝等;第三章分析了智能車驅(qū)動系統(tǒng)數(shù)學(xué)模型,研究了智能車路徑識別方法、給出了智能車控制方案;第四章論述了硬件方案分析、選擇與設(shè)計, 對智能車技術(shù)參數(shù)、車模
2011-07-25 19:20:35
基于光電導(dǎo)航的無人駕駛智能車下個月學(xué)校舉行這個智能車比賽,比在相同路段跑的時間,看到這個題目,沒有任何思路。。望高手指教下,原理圖,設(shè)計思路。。都可以!!謝謝~
2013-04-03 22:53:19
求一個智能車的程序,有一個L298N驅(qū)動,紅外傳感器,舵機(jī)模塊的
2013-08-27 22:35:47
簡易智能車元件,制作及開源代碼,謝謝!那
2016-04-07 18:00:18
這一次,我們開始正式進(jìn)入了,車輛的控制大致可以分成一下部分:循跡,需要電磁傳感器,或者攝像頭。這兩個應(yīng)該是智能車最有可能使用的傳感器了,其他的就算是另辟蹊徑了。然后我主要使用的是電磁。這是我最終
2022-01-19 06:23:48
大神提出改善的建議。資料在闖客網(wǎng)技術(shù)論壇下載 整個系統(tǒng)分為懸停半空的攝像頭識別系統(tǒng)和地面的智能車控制系統(tǒng),這兩個系統(tǒng)均采用MKL26Z256VLL4作為核心控制單元。半空中的識別系統(tǒng)通過模擬攝像頭
2018-10-24 19:17:51
智能車創(chuàng)意組識別圖an用openmv 還是用 opencv 比較好
2023-10-24 06:24:31
嗯,各位好久不見,最近有點(diǎn)事,現(xiàn)在在寫要求的日志周志,就順手寫下智能車,趁著現(xiàn)在我還有些印象。首先,我們做車要知道,我們在做些什么吧!軟件的部分,就是控制控制一個人走路,我們走路是怎么走的?首先你
2022-01-14 06:05:42
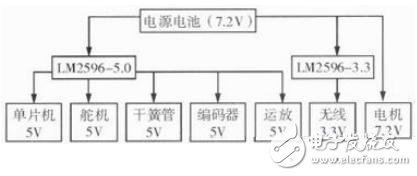
,因此在設(shè)計控制系統(tǒng)時應(yīng)選好合適的電源。競賽規(guī)則規(guī)定,比賽使用智能車競賽統(tǒng)一配發(fā)的標(biāo)準(zhǔn)車模用7.2V 2000mAh Ni-cd供電,而單片機(jī)系統(tǒng)、路徑識別的光電傳感器、光電碼編碼器等均需要5V電源,伺服
2013-05-07 23:40:08
本帖最后由 elecfans跑堂 于 2015-9-15 10:13 編輯
智能車燈控制系統(tǒng),硬件電路怎么做?小弟萬分感謝了
2015-09-15 09:36:48
飛思卡爾智能車—電磁循跡(組別通用),六路運(yùn)放,適用于電磁組所有組別,電路運(yùn)行穩(wěn)定,且移植性較強(qiáng)。
2022-03-02 06:41:33
1、智能車目標(biāo)識別系統(tǒng)的實(shí)現(xiàn) 首先,簡單介紹一下上面提到的各個話題的范圍 (Domain),人工智能 (Artifitial Intelligence)是最大的話題,如果用一張圖來說明的話
2022-09-06 14:54:26
智能車設(shè)計基礎(chǔ) 第10章.rar http://filemarkets.com/file/bai2471/9d9e6c95/智能車設(shè)計基礎(chǔ) 第3章.rar: http://www.t00y.com
2012-10-21 21:11:12
我的第一輛智能車—電磁循跡智能車以下是所用的模塊:舵機(jī),電機(jī),L298N驅(qū)動模塊,PID算法,OLED,電磁桿,ADC多路采集配置DMA,干簧管,普通GPIO口使用。1.舵機(jī)模塊舵機(jī),三條線路,一條
2022-01-14 09:08:34
Lead-in:現(xiàn)今MCU和電力電子技術(shù)在智能車燈控制系統(tǒng)中發(fā)展的趨勢是用智能功率IC替代傳統(tǒng)的繼電器和保險絲,有效實(shí)現(xiàn)對車燈的過熱、過壓、短路等故障的保護(hù)和診斷;MCU用PWM調(diào)制來實(shí)現(xiàn)對車燈兩端
2018-12-06 09:45:03
車用MEMS的應(yīng)用有哪些?車用MEMS有哪些具體應(yīng)用體現(xiàn)?MEMS汽車傳感器在汽車電子控制系統(tǒng)的應(yīng)用是什么?
2021-06-17 10:57:24
不錯的資料,智能車黑線識別算法及控制策略研究
2015-09-09 12:17:33
求大神 給個 關(guān)于智能車仿真的labview程序
2016-05-04 13:04:38
申請理由:項(xiàng)目描述:wifi攝像頭智能車首先最簡單的功能是:手機(jī)APP通過WIFI控制智能車的運(yùn)動然后實(shí)現(xiàn)的是用wifi把智能車上面的攝像頭數(shù)據(jù)傳輸回手機(jī)最后要做到的是智能車根據(jù)攝像頭的數(shù)據(jù)自動識別
2016-11-16 16:12:32
智能小車是一種以汽車電子為背景,涵蓋控制、傳感技術(shù)、模糊識別、電子、計算機(jī)、機(jī)械、電氣等多學(xué)科知識的科技創(chuàng)意性設(shè)計。筆者將以高校常見的智能小車為研究對象,淺析智能小車系統(tǒng)及其電磁干擾。一般的,智能車
2021-07-02 14:15:59
目錄第4篇實(shí)戰(zhàn)案例篇第16章 智能車控制系統(tǒng) 該書叫什么名字
2015-04-25 15:15:52
本文是根據(jù)第三屆全國大學(xué)生“飛思卡爾”杯智能汽車大賽要求設(shè)計自主識別道路的智能車。整個系統(tǒng)采用了組委會提供的16位單片機(jī)mc9s12dg128為核心,模型車本身帶有差速器和后輪驅(qū)動,需要設(shè)計完成基于單片機(jī)的自動控制系統(tǒng)使得模型車在封閉的跑道上自主循線運(yùn)行。
2020-08-05 06:28:21
文章涉及到內(nèi)容不限于直立車,因?yàn)楹芏鄸|西都是通用的。話題01姿態(tài)傳感器(陀螺儀和加速度計)的使用談到直立車,包括今年新增的單車,這兩種涉及到平衡的車型,是肯定離不開姿態(tài)傳感器的...
2021-07-16 06:12:45
本文將從該智能車總體方案、路徑識別方案選擇、轉(zhuǎn)向和驅(qū)動控制及路徑記憶算法等方面進(jìn)行介紹。
2021-05-18 06:01:07
,如何讓智能車在不同形狀的賽道上進(jìn)行平穩(wěn) 、快速的切換,實(shí)現(xiàn)路徑的最優(yōu)控制,是轉(zhuǎn)向控制的一個關(guān)鍵問題 目前,轉(zhuǎn)向控制的物理實(shí)現(xiàn)普遍采用的是用一個舵機(jī)作為前輪的轉(zhuǎn)向控制執(zhí)行器。這種方法將使兩個前輪的偏轉(zhuǎn)
2023-09-19 08:03:50
摘要:針對智能車的控制系統(tǒng), 選用STC89C52作為整個系統(tǒng)的主控芯片, 并進(jìn)行硬件電路設(shè)計;以NREF24L01作為無線接收模塊, 選取E18-D80NK-N紅外光電傳感器作為避障模塊的核心器件
2021-08-23 07:49:54
智能車其實(shí)沒有那么智能,只是自身攜帶的傳感器多一些,能夠脫離人的控制在特定的環(huán)境下行走而已。你給小車裝一個循跡模塊,它就可以在跟著特定的軌跡行走,也就是大家在社團(tuán)科技展出,科普宣傳周等活動中最
2022-02-14 07:20:12
求各位大神分享資料軟件實(shí)現(xiàn)智能車的控制系統(tǒng)飛思卡爾
2015-04-26 23:15:19
引言 本文主要設(shè)計的是一輛自主識別道路的智能車。整個系統(tǒng)采用了16位單片機(jī)mc9s12dg128,模型車本身帶有差速器和后輪驅(qū)動,需要設(shè)計完成基于單片機(jī)的自動控制系統(tǒng)使得模型車在封閉的跑道
2018-11-05 15:50:57
的舵機(jī)驅(qū)動前輪轉(zhuǎn)向,使用符合PI算法的控制器實(shí)現(xiàn)直流電機(jī)的調(diào)速。為了使智能車快速、平穩(wěn)地行駛,系統(tǒng)必須把路徑識別、相應(yīng)的轉(zhuǎn)向伺服電機(jī)控制以及直流驅(qū)動電機(jī)控制準(zhǔn)確地結(jié)合在一起。 1 硬件設(shè)計 本系統(tǒng)硬件
2018-11-06 15:08:45
作為一名練習(xí)時長兩年半的練習(xí)生,來淺談下第十五屆智能車競賽規(guī)則。第十五屆智能車受疫情影響,終于在千呼萬喚中姍姍來遲。細(xì)讀規(guī)則,便會發(fā)現(xiàn)今年的智能車和往年有所不同。今年的組別設(shè)置有競速組4組:基礎(chǔ)四輪
2021-09-02 06:29:54
基于聲音識別的智能車載監(jiān)控系統(tǒng)設(shè)計,求大神救救我這個即將畢業(yè)的小女漢紙{:4:}
2017-05-10 11:34:36
設(shè)計一種集紅外遙控、 黑線循跡、自動泊車、車速檢測、行駛路程顯示等功能于一體的智能車。主要使用了紅外傳感技術(shù),并結(jié)合 STM32F103 系列芯片,模擬現(xiàn)代新型汽車的自動駕駛功能。 采用槽型對射光電傳感器
2019-02-28 20:07:06
的模型汽車,按照規(guī)定路線行進(jìn),完成時間最短者為優(yōu)勝。該競賽涵蓋了控制、模式識別、傳感技術(shù)、電子、電氣、計算機(jī)和機(jī)械等多個學(xué)科的內(nèi)容。文中基于此競賽為背景,設(shè)計了一套智能車控制系統(tǒng)。本系統(tǒng)針對智能車的路徑
2019-07-23 08:22:08
針對“飛思卡爾”杯全國大學(xué)生智能車邀請賽,本文開發(fā)了基于LabVIEW虛擬儀器技術(shù)的Plastid仿真系統(tǒng),該系統(tǒng)可針對不同的賽車、賽道、路徑識別方案、控制策略等內(nèi)容,進(jìn)行相關(guān)分析,大大提高智能車開發(fā)效率。
2011-03-07 10:32:44
labview程序控制NI智能車,怎么控制該智能車轉(zhuǎn)彎時的角度沒有大的偏差??老師給的程序看不懂?程序如圖
2016-12-15 23:09:00
智能車系統(tǒng)是由哪些模塊組成的?如何利用MCU核心板去實(shí)現(xiàn)智能車系統(tǒng)設(shè)計?
2021-10-26 08:06:54
巡線智能車控制中的CNN網(wǎng)絡(luò)有何應(yīng)用?嵌入式單片機(jī)中的神經(jīng)網(wǎng)絡(luò)該怎樣去使用?如何利用卷積神經(jīng)網(wǎng)絡(luò)去更好地控制巡線智能車呢?
2021-12-21 07:47:24
ITS所需要的重要駕駛支持系統(tǒng)包括哪些方面?如何利用毫米波雷達(dá)和圖像傳感器構(gòu)建智能駕駛控制系統(tǒng)?環(huán)境識別技術(shù)在汽車中的應(yīng)用是什么?
2021-05-17 06:35:07
如何制作一輛智能車?
2022-02-15 07:39:21
`我最近參加了一個比賽這個比賽要求智能車從中間通過要能檢測出隧道的長度,上面兩張是這種隧道的照片 內(nèi)表面為黑色的鍍鋅鐵皮 ,我想知道哪種傳感器能檢測出小車已經(jīng)進(jìn)入隧道?(比賽場地為室內(nèi)體育場,正常
2014-07-15 18:05:37
`我最近參加了一個比賽這個比賽要求智能車從中間通過要能檢測出隧道的長度,上面兩張是這種隧道的照片 內(nèi)表面為黑色的鍍鋅鐵皮 ,我想知道哪種傳感器能檢測出小車已經(jīng)進(jìn)入隧道?(比賽場地為室內(nèi)體育場,正常
2014-07-15 18:06:50
本文介紹了一種智能車控制系統(tǒng)的設(shè)計與實(shí)現(xiàn)方法。通過大量實(shí)驗(yàn)測試證明,該智能車能快速平穩(wěn)地在制作的賽道上跟蹤黑色引導(dǎo)線并行駛,而且尋跡效果良好,控制響應(yīng)速度快,動態(tài)性能良好,穩(wěn)態(tài)誤差小,系統(tǒng)的穩(wěn)定性和抗干擾能力強(qiáng)。
2021-05-18 06:46:48
本文采用通電導(dǎo)線產(chǎn)生的電磁場對智能車進(jìn)行引導(dǎo)。使用磁場信號引導(dǎo)車沿一定軌跡行走的優(yōu)點(diǎn)主要體現(xiàn)在磁場信號具有很好的環(huán)境適應(yīng)性,不受光線、溫度、濕度等環(huán)境因素的影響。
2021-05-14 07:15:18
摘要:針對智能車的控制系統(tǒng), 選用STC89C52作為整個系統(tǒng)的主控芯片, 并進(jìn)行硬件電路設(shè)計;以NREF24L01作為無線接收模塊, 選取E18-D80NK-N紅外光電傳感器作為避障模塊的核心器件
2021-12-08 08:30:05
的無人駕駛技術(shù)來的那么復(fù)雜,但是也需要相應(yīng)的傳感器、執(zhí)行器、控制器以及硬件電路并進(jìn)行控制算法的設(shè)計與調(diào)試等。一般需要數(shù)月才能較為系統(tǒng)地掌握上述知識,而能熟練應(yīng)用并進(jìn)行系統(tǒng)化調(diào)試以及創(chuàng)新往往需要更長時間。因此,該項(xiàng)賽事為大學(xué)生將理論知識轉(zhuǎn)化為實(shí)踐技術(shù)提供了良好的平臺。同時,智能車組委會每年都會.
2021-07-29 06:00:40
本文開發(fā)了一種基于光電傳感和路徑記憶的智能車導(dǎo)航系統(tǒng)。
2021-05-12 07:04:03
如何利用超聲波測距來實(shí)現(xiàn)智能車報警的功能呢?怎樣去設(shè)計一種基于HC-SR04模塊的智能車庫控制系統(tǒng)?
2021-10-18 09:31:57
智能家居控制網(wǎng)絡(luò)有哪些性能?怎樣去設(shè)計一種基于無線傳感器網(wǎng)絡(luò)和電力線通訊的智能家居控制系統(tǒng)?
2021-09-23 07:46:14
什么是雙車規(guī)則?怎樣去設(shè)計一款基于傳感器的智能車?
2021-10-18 13:19:13
方案分析74 芯片的介紹73.2.1 主控芯片及其各部分性能83.2.2 SPCE061A用于語音遙控智能小車中的功能103.3 無線語音遙控智能車電機(jī)驅(qū)動控制方案155 系統(tǒng)設(shè)計方案154.1系統(tǒng)整體
2012-07-31 22:12:51
;catid=57樹莓派智能車AlphaBot教程1:人生若只如初見 ...樹莓派智能車AlphaBot教程2:直流電機(jī)控制 ... 樹莓派智能車AlphaBot教程3:避障樹莓派智能車AlphaBot
2017-05-15 15:39:34
對語音進(jìn)行識別以及合成,再將識別的語音轉(zhuǎn)化為機(jī)器識別的指令,從而實(shí)現(xiàn)機(jī)器人對話和控制機(jī)器人執(zhí)行相應(yīng)操作的效果。樹莓派成本相對低廉,便于操控傳感器和電氣設(shè)備。
2021-09-07 08:55:19
做一個攝像頭的智能車
2014-10-14 11:31:45
求一套智能車設(shè)計,本人想要做智能車方面的,借鑒一下。
2015-11-10 00:37:42
電動車電機(jī)的控制系統(tǒng)一般由電動機(jī)、功率變換器、傳感器和電動車控制器組成,電動車控制器芯片是用來控制電動車電機(jī)的啟動、運(yùn)行、進(jìn)退、速度、停止以及電動車的其它電子器件的核心控制器件,是電動車上重要的部件
2021-11-17 06:49:06
設(shè)計目標(biāo):①軟件設(shè)計基于單片機(jī)的智能車系統(tǒng);②實(shí)現(xiàn)操作界面登錄功能;③實(shí)現(xiàn)管理員操作系統(tǒng)界面功能;④實(shí)現(xiàn)用戶操作系統(tǒng)界面功能;⑤實(shí)現(xiàn)智能車控制系統(tǒng)界面功能。求各位大神指點(diǎn)迷津,先實(shí)現(xiàn)無線遙控模塊
2015-04-26 20:55:15
設(shè)計目標(biāo):軟件設(shè)計基于單片機(jī)的智能車系統(tǒng)(飛思卡爾)如何實(shí)現(xiàn)上位機(jī)與下位機(jī)之間的通信
2015-04-21 23:13:14
內(nèi)容簡介:我們以“安芯一號”為主控制器設(shè)計的帶觸摸控制功能的智能車與傳統(tǒng)的遙控車相比,如路徑識別有很大的不同,它的路徑來源于用戶的輸入,輸入的路徑經(jīng)過觸摸屏離散化成為坐標(biāo)點(diǎn),根據(jù)獲得的坐標(biāo)點(diǎn)程序
2013-10-15 12:46:58
本文介紹了一種基于CAN總線的車用智能傳感器系統(tǒng)設(shè)計。
2021-05-13 06:16:47
什么是無速度傳感器矢量控制系統(tǒng)?怎樣對無速度傳感器矢量控制系統(tǒng)進(jìn)行調(diào)試?
2021-04-28 06:49:48
想設(shè)計一個智能車的控制系統(tǒng),包含stm32+cc1101+攝像頭模塊+電機(jī)的驅(qū)動電路,要實(shí)現(xiàn)的功能是可以通過手機(jī)端APP來控制電機(jī)的速度,同時小車攝像頭的圖像、電機(jī)的速度、其他傳感器的信號也是要回
2019-04-04 06:36:47
采用光電傳感器的智能車控制研究
2012-08-20 13:05:43
飛思卡爾智能車控制PWM的引腳在哪
2017-02-28 19:49:16
飛思卡爾智能車制作全過程 本人在很久以前做的一輛用來比賽的智能車--獲得華北一等獎,全國二等獎,有許多可改進(jìn)地方,下面我們來立即開始我們的智能車制作之旅。 首先,一個系統(tǒng)中,傳感器至關(guān)重要:不管
2012-05-18 14:14:31
基于光電傳感器的路徑檢測試驗(yàn):正確識別賽道信息是進(jìn)行車體控制的前提,因此,選 何種傳感器檢測道路信息將直接決定整個控制算法。本文對于選擇光電傳感器作為智能車路徑
2009-08-01 23:01:54 29
29 介紹了一種基于光電管路徑識別的智能車系統(tǒng)。該智能車使用光電管作為路徑識別裝置,依靠舵機(jī)輔助智能車轉(zhuǎn)向,使用直流電機(jī)驅(qū)動智能車前進(jìn)。系統(tǒng)采用符合PI控制算法的控制器
2010-07-06 16:57:1473 MC9S12DG128的路徑識別的智能車系統(tǒng)設(shè)計
引言:隨著控制技術(shù)及計算機(jī)技術(shù)的發(fā)展,智能車系統(tǒng)將在未來工業(yè)生產(chǎn)和日常生活中扮演重要的角色。本文
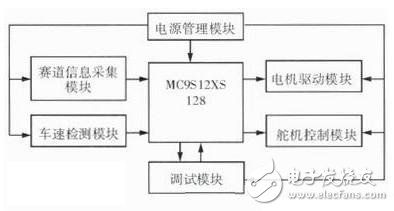
2008-10-08 13:22:581346 介紹了基于MC9S12XS128單片機(jī)控制的智能車系統(tǒng),該系統(tǒng)以CCD攝像頭傳感器作為路徑識別裝置,通過圖像識別提取道路黑線信息,計算出反應(yīng)道路形狀的舵機(jī)控制量,對舵機(jī)進(jìn)行控制。對智
2011-02-12 15:31:05156 介紹了一種基于光電管路徑識別的智能車系統(tǒng)。該智能車使用光電管作為路徑識別裝置,依靠舵機(jī)輔助智能車轉(zhuǎn)向,使用直流電機(jī)驅(qū)動智能車前進(jìn)。系統(tǒng)采用符合PI控制算法的控制器進(jìn)行
2011-06-09 09:56:412756 
本文介紹了一種基于紅外反射式光電傳感器路徑識別的智能車控制系統(tǒng)。單片機(jī)獲得傳感器采集的路面信息和車速信息,經(jīng)過分析后控制 智能車 的舵機(jī)轉(zhuǎn)向,同時對直流電機(jī)進(jìn)行調(diào)速
2011-07-06 17:16:51164 路徑識別系統(tǒng)是智能車的眼睛,是智能車獲取環(huán)境信息,實(shí)現(xiàn)自動控制的基礎(chǔ)。針對路徑識別系統(tǒng)高精度、高速度的要求,分別設(shè)計了智能車光電傳感器路徑識別系統(tǒng)和攝像頭傳感器路
2012-09-12 16:51:220 高精度、高速度、大前瞻的路徑采集系統(tǒng)能為智能車提高更精準(zhǔn)、更及時和更豐富的賽道信息,是智能車獲取更大速度的關(guān)鍵。針對激光傳感器的路徑采集模塊,設(shè)計了一種路徑識別算
2012-10-10 15:04:2348 為了實(shí)現(xiàn)智能小車自主尋跡的功能,設(shè)計了一種電磁導(dǎo)航式智能車控制系統(tǒng)。 以飛思卡爾 16 位單片機(jī) MC9S128 為核心控 制單元,重點(diǎn)闡述了路徑信息采集和直流驅(qū)動電機(jī)的模塊設(shè)計,確立了傳感器的排布
2015-11-02 17:47:003 基于FPGA的智能車路徑圖像識別的預(yù)處理設(shè)計
2016-09-22 12:41:1523 引言 隨著控制技術(shù)及計算機(jī)技術(shù)的發(fā)展,智能車系統(tǒng)將在未來工業(yè)生產(chǎn)和日常生活中扮演重要的角色。本文所述智能車尋跡系統(tǒng)采用紅外反射式光電管識別路徑上的黑線,并以最短的時間完成尋跡。通過加長轉(zhuǎn)臂的舵機(jī)驅(qū)動
2017-11-30 10:45:011 引言 隨著控制技術(shù)及計算機(jī)技術(shù)的發(fā)展,智能車系統(tǒng)將在未來工業(yè)生產(chǎn)和日常生活中扮演重要的角色。本文所述智能車尋跡系統(tǒng)采用紅外反射式光電管識別路徑上的黑線,并以最短的時間完成尋跡。通過加長轉(zhuǎn)臂的舵機(jī)驅(qū)動
2017-12-05 11:26:271 基于AT89S52單片機(jī)為核心控制單元,紅外光電傳感器為檢測手段,設(shè)計開發(fā)一種自動尋跡智能車控制系統(tǒng)。本系統(tǒng)利用紅外光電傳感器陣列采集離散的路徑信息,采用模糊控制方法改變電機(jī)方向和轉(zhuǎn)速,縮短智能車
2017-12-13 11:42:252 本文主要介紹了基于智能車牌識別的交通燈控制系統(tǒng)的設(shè)計。在城市各交通干道和各十字路口、卡口架設(shè)固定電子車牌監(jiān)測基站及配套的交通信號燈控制系統(tǒng)。交通信號燈控制器根據(jù)車牌監(jiān)測基站獲取的車牌信息判斷實(shí)時
2018-01-09 11:21:013769 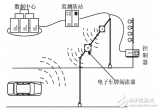
研究一種具有路徑記憶功能的智能車控制系統(tǒng)。該智能車使用紅外光電傳感器實(shí)現(xiàn)路徑識別,依靠電機(jī)驅(qū)動前進(jìn),使用舵機(jī)幫助智能車轉(zhuǎn)向。該系統(tǒng)采用路徑記憶算法對智能車進(jìn)行控制,將記憶下的賽道信息作為主要控制信息,通過提前判斷彎道的曲率大小,從而得到一個最佳過彎速度,使其運(yùn)行更平穩(wěn)、快速。
2018-12-07 17:20:4816 如何設(shè)計路徑識別方案是參賽隊伍首先要面對的問題之一,根據(jù)韓國比賽情況參賽隊伍所采用的路徑識別方案大致可分為兩種使用光電傳感器和使用CCD 攝像頭其中尤以光電傳感器方案最為常用本文是基于智能車仿真模型
2019-06-26 17:14:1210 智能車身控制系統(tǒng)(MAGIC BODY CONTROL)與主動車身控制系統(tǒng)(ABC)基本相同,在原ABC 基礎(chǔ)上擴(kuò)展了立體攝像頭識別路面狀況的附加功能。
2019-07-12 17:20:107213 環(huán)境感知、規(guī)劃決策和運(yùn)動控制三大部分,涵蓋了自動控制、模式識別、傳感技術(shù)、電子、計算機(jī)、機(jī)械、能源等多個學(xué)科知識。 電磁智能車想要正常行駛在賽道上,必定是需要實(shí)時根據(jù)賽道的狀態(tài)來調(diào)整車身姿態(tài)的,那么電磁智能車是怎
2022-12-13 17:04:283168
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論