 電子發(fā)燒友App
電子發(fā)燒友App


通用汽車在2018年1月13日發(fā)布通用無(wú)人車安全報(bào)告,并宣稱將在2019年量產(chǎn)基于Bolt純電動(dòng)車改裝的無(wú)人車,本文根據(jù)公開資料對(duì)通用無(wú)人車做一些分析估計(jì),僅供大家參考。
通用的無(wú)人車沒(méi)有方向盤和踏板,顯然是無(wú)法人工介入,也彰顯通用對(duì)自己無(wú)人車技術(shù)的信心。同時(shí)也顯示出傳統(tǒng)車企在無(wú)人車領(lǐng)域強(qiáng)大的競(jìng)爭(zhēng)力,如果谷歌想要做類似的無(wú)人車,那么谷歌必須求助于菲亞特克萊斯勒FCA為其定做。這就是新興造車企業(yè)或IT自動(dòng)駕駛企業(yè)的尷尬之處,不和傳統(tǒng)車企合作,它們無(wú)法拿到一款相對(duì)比較優(yōu)秀的改裝平臺(tái),算法再?gòu)?qiáng)大也無(wú)法落地。
新興造車企業(yè)或IT自動(dòng)駕駛企業(yè)也無(wú)法得到優(yōu)秀汽車廠家的支持,因?yàn)閮?yōu)秀汽車廠家視其為競(jìng)爭(zhēng)對(duì)手,只會(huì)盡力打壓,不會(huì)出手援助。只有非主流的車廠,才不把新興造車企業(yè)或IT自動(dòng)駕駛企業(yè)視為競(jìng)爭(zhēng)對(duì)手,同時(shí)為了消化過(guò)剩的產(chǎn)能,樂(lè)于與新興造車企業(yè)或IT自動(dòng)駕駛企業(yè)合作。另一個(gè)尷尬的是特斯拉,雖然只達(dá)到SAE分級(jí)中的L2,但是宣傳成L4,一時(shí)占盡風(fēng)頭,然而技術(shù)力量不足。L2終究是L2,奧迪A8的L3和通用Cruise的L5(也未完全達(dá)到SAE的L5級(jí),稱L4+更合適)無(wú)論在實(shí)際應(yīng)用和宣傳上都超過(guò)了特斯拉。
Model 3遲遲未達(dá)預(yù)期,特斯拉在2017年第四季度預(yù)期交付Model 3新車2917輛,但實(shí)際只交付了1550輛,12月僅交付517輛。作為Model 3的競(jìng)爭(zhēng)對(duì)手,通用的Bolt銷量持續(xù)攀升,7月銷量為1971輛,11月達(dá)3747輛,12月銷量達(dá)3327輛,同比大增近5倍,是Model 3的6倍。全年銷量超過(guò)23000輛,對(duì)通用來(lái)說(shuō)產(chǎn)能完全不是問(wèn)題,每月3萬(wàn)輛的產(chǎn)能也能輕易達(dá)到。
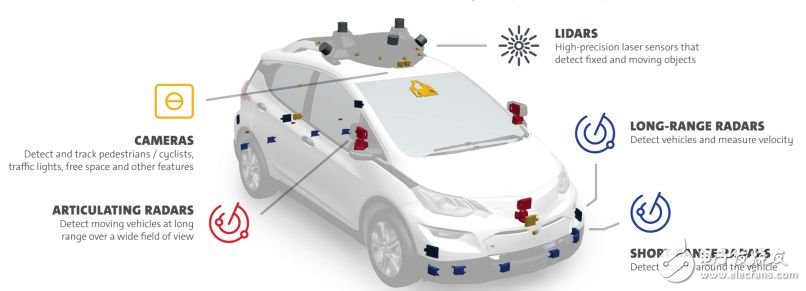
通用這輛無(wú)人車采用5個(gè)激光雷達(dá),21個(gè)毫米波雷達(dá),16個(gè)攝像頭。5個(gè)激光雷達(dá)是Velodyne的VLP16 16線激光雷達(dá)。今年1月初,Velodyne下調(diào)VLP16的售價(jià),從7999美元到3999美元,百度和福特作為Velodyne的大股東,可以賺通用的錢了。21個(gè)毫米波雷達(dá)中12個(gè)79GHz毫米波雷達(dá)由日本ALPS提供,兩個(gè)前向兩個(gè)后向長(zhǎng)距離毫米波雷達(dá)推測(cè)由德國(guó)大陸提供,型號(hào)可能是ARS-408。5個(gè)高分辨率(通用稱之為Articulating)毫米波雷達(dá)由德國(guó)博世提供,主要是車兩側(cè)和正前方。
16個(gè)攝像頭中,車頂10個(gè),包括一個(gè)基線長(zhǎng)大約8厘米的雙目攝像頭,8個(gè)360度環(huán)視攝像頭,攝像頭周圍均有紅外LED,可以在低照度甚至黑夜下工作,當(dāng)然分比率會(huì)下降很多。車內(nèi)后視鏡位置有一個(gè)非無(wú)人駕駛版Bolt的單目攝像頭,車輛最前部位置有一個(gè)長(zhǎng)距離單目攝像頭。車外后視鏡和車后部各兩個(gè)攝像頭。
激光雷達(dá)應(yīng)用
通用的原文是We start with LiDAR, which provides highly precise feedback using laser measurements for both fixed and moving objects.激光雷達(dá)首先是定位,無(wú)人車的第一步也是定位,利用激光雷達(dá)SLAM的回環(huán)檢測(cè)或者與全局地圖做match,進(jìn)而做到厘米級(jí)定位,這是業(yè)內(nèi)一致的做法,百度、谷歌和通用主流廠家都是如此。而非主流廠家大多用GPS RTK定位,有兩個(gè)非常顯眼的蘑菇天線,GPS RTK定位不能做大規(guī)模應(yīng)用,只能用于拉投資的demo。
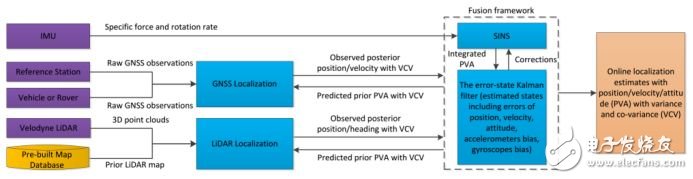
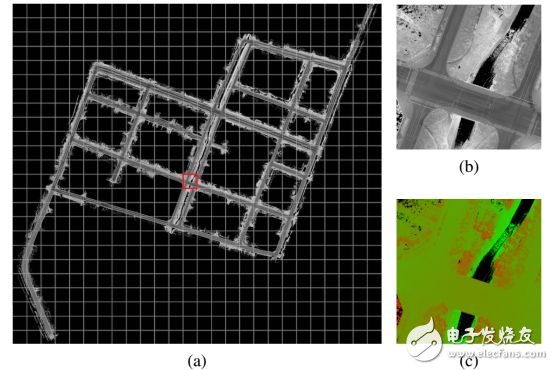
上圖為百度無(wú)人車定位框架。這種定位方法的缺點(diǎn)是需要提前制作激光雷達(dá)地圖也就是Prior LIDAR MAP,這對(duì)通用來(lái)說(shuō)不是難事。通用在其超級(jí)巡航里已經(jīng)制作了美國(guó)的所有高速公路的激光地圖。但是如果沒(méi)有提前制作激光雷達(dá)地圖的區(qū)域(如人煙稀少地域廣大的郊區(qū)和農(nóng)村),無(wú)人車做不到厘米級(jí)定位,只能做到傳統(tǒng)GPS最高3米的定位。
激光雷達(dá)的第二個(gè)作用是與攝像頭數(shù)據(jù)融合做目標(biāo)分類識(shí)別和軌跡跟蹤,通用的原文是這樣子:We combine LiDAR and camera data for classifying and tracking objects, making high confidence determinations more quickly. This helps, for example, identify pedestrians, vehicle types and road details such as lane lines, construction zones and signage.推測(cè)由兩側(cè)朝下的激光雷達(dá)來(lái)獲得道路細(xì)節(jié),如車道線,路沿,隔離帶,虛實(shí)線,斑馬線。百度無(wú)人車也是用激光雷達(dá)獲得道路細(xì)節(jié),出身百度的景馳則在2018年CES上演示了只用激光雷達(dá)識(shí)別車道線、行人和車輛的技術(shù)。谷歌和豐田也是如此。
目前激光雷達(dá)檢測(cè)車道線主要有四種方法,一是根據(jù)激光雷達(dá)回波寬度。二是根據(jù)激光雷達(dá)反射強(qiáng)度信息形成的灰度圖,或者根據(jù)強(qiáng)度信息與高程信息配合,過(guò)濾出無(wú)效信息。三是激光雷達(dá)SLAM與高精度地圖配合,不僅檢測(cè)車道線還進(jìn)行自車定位。四是利用激光雷達(dá)能夠獲取路沿高度信息或物理反射信息不同的特性,先檢測(cè)出路沿,因?yàn)榈缆穼挾仁且阎鶕?jù)距離再推算出車道線位置。對(duì)于某些路沿與路面高度相差低于3厘米的道路,這種方法無(wú)法使用。后三種方法需要多線激光雷達(dá),最少也是16線激光雷達(dá)。前者可以使用4線或單線激光雷達(dá)。目前絕大部分都是采用第二種方法。這種方法的標(biāo)志就是需要激光雷達(dá)盡量貼近路面或朝向路面以取得比較多的反射強(qiáng)度信息,豐田、谷歌都是在車最前部保險(xiǎn)杠處安置激光雷達(dá),通用由于保險(xiǎn)杠附近有9個(gè)毫米波雷達(dá)和1個(gè)攝像頭,估計(jì)是安裝空間不足,只能放在車頂。
中間正前方的激光雷達(dá)與攝像頭數(shù)據(jù)融合可以加大識(shí)別目標(biāo)的速度和準(zhǔn)確性。用激光雷達(dá)識(shí)別目標(biāo)有兩種做法,一種是利用激光雷達(dá)反射強(qiáng)度值,不同特性的物質(zhì)對(duì)激光雷達(dá)反射強(qiáng)度差異很大,利用這個(gè)差異可以對(duì)目標(biāo)進(jìn)行簡(jiǎn)單分類,比如行人、車輛、建筑物、植物、路面、草地等。由于只是簡(jiǎn)單的閾值濾波器,計(jì)算量很小,速度極快,遠(yuǎn)高于深度學(xué)習(xí)的目標(biāo)分類。就在2018年1月初,瑞薩宣布和初創(chuàng)公司Dibotics合作,Dibotics有一款增強(qiáng)激光雷達(dá)(Augmented LiDAR)軟件,就是采用這種方法做分類識(shí)別,瑞薩將把這套軟件嵌入進(jìn)其芯片中。第二種是將激光雷達(dá)的點(diǎn)云轉(zhuǎn)換為具備張量結(jié)構(gòu)的密集的圖像數(shù)據(jù),然后用faster RCNN識(shí)別。后者需要強(qiáng)大的運(yùn)算資源,處理速度比較慢。faster RCNN則是圖像識(shí)別領(lǐng)域公認(rèn)最優(yōu)秀的方法。推測(cè)通用用了前一種,而攝像頭的深度學(xué)習(xí)識(shí)別,通用應(yīng)該也是用faster RCNN。
激光雷達(dá)還有一個(gè)優(yōu)勢(shì)就是擅長(zhǎng)預(yù)測(cè)移動(dòng)物體的軌跡和軌跡跟蹤,這是行為決策的基礎(chǔ)。就像人類駕駛員,可以預(yù)估行人或其他車輛下一步的方向或位置,根據(jù)這個(gè)預(yù)估來(lái)做出決策。激光雷達(dá)天生具備軌跡場(chǎng)(trajectory-yielding)的能力,Velodyne的16線激光雷達(dá)在美國(guó)最隆重的超級(jí)碗賽事上能夠準(zhǔn)確預(yù)測(cè)四分衛(wèi)投球后球的移動(dòng)位置(A Velodyne VLP-16 LiDAR read off each tossed football’s speed and direction to predict where the ball would land)。Velodyne對(duì)此非常自豪。所以通用也說(shuō)用激光雷達(dá)tracking objects,這比攝像頭用光流法計(jì)算軌跡并預(yù)測(cè)要快得多,運(yùn)算資源消耗也遠(yuǎn)遠(yuǎn)低于光流法。
毫米波雷達(dá)應(yīng)用
在美國(guó),如果要想使用未經(jīng)FCC認(rèn)證的無(wú)線設(shè)備,必須先申請(qǐng)臨時(shí)許可(STA),否則是違法行為。2017年3月17日,日本車用電子供貨商 Alps Electric 申請(qǐng)了 STA 許可證,Alps Electric 要測(cè)試的是名為 Ukaza 的車用毫米波雷達(dá),工作頻段為 76-81 GHz。這是該頻段毫米波雷達(dá)第一次公開測(cè)試。在申請(qǐng)中,Alps Electric 表示,公司想從 5 月 1 日起陸續(xù)測(cè)試 3,000 臺(tái) Ukaza。Alps表示 每輛車需要裝配 10 組雷達(dá),因此 3,000 臺(tái) Ukaza 只夠 300 輛車使用。10 天后,通用也向 FCC 遞交了類似的 STA 許可證申請(qǐng),它要測(cè)試的也是 Ukaza 雷達(dá)。不過(guò),通用工程師 Robert Reagan 在申請(qǐng)中要求 FCC 幫忙保密,因?yàn)闇y(cè)試涉及商業(yè)敏感信息。顯然,ALPS的毫米波雷達(dá)是用在通用汽車上的,這就是通用要打造的300輛的無(wú)人駕駛測(cè)試車隊(duì) 。
Ukaza 雷達(dá)可不是 Bolt 的唯一裝備,3 月 28 日(通用申請(qǐng)后一天)博世也遞交了自己的 STA 許可證申請(qǐng)。博世申請(qǐng)中表示,公司要在客戶的自動(dòng)駕駛車隊(duì)測(cè)試中程雷達(dá)(77GHz),隨后透過(guò)搜集的數(shù)據(jù)開發(fā)新的算法。從申請(qǐng)來(lái)看,博世要測(cè)試的雷達(dá)共有 650 組,夠 162 輛車使用。每輛車4個(gè),與 Alps 公司類似,博世也沒(méi)有點(diǎn)出客戶的名字,但給了測(cè)試的具體地點(diǎn),從經(jīng)緯度來(lái)看,這些雷達(dá)將在舊金山、底特律和斯科茨代爾測(cè)試,唯一橫跨這三地測(cè)試的公司只有通用一家。
經(jīng)過(guò)幾個(gè)月測(cè)試后,通用可能覺得還不夠,因此增加了數(shù)量,79GHz增加到12個(gè),高分辨率(通用稱之為Articulating)毫米波雷達(dá)增加到5個(gè)。博世的雷達(dá)如果是傳統(tǒng)的77GHz毫米波雷達(dá),應(yīng)該無(wú)需再向FCC提出STA,推測(cè)可能是2-4GHz帶寬的雷達(dá),也可能博世把76-81GHz雷達(dá)(也就是79GHz雷達(dá))稱為77GHz雷達(dá),畢竟博世不能造雷達(dá)收發(fā)器,也是79GHz雷達(dá)的可能性很高,其帶寬最高是傳統(tǒng)77GHz雷達(dá)的8倍,因此分辨率可達(dá)4厘米,稱之為Articulating也說(shuō)得過(guò)去。
12個(gè)79GHz毫米波雷達(dá)采用級(jí)聯(lián)方式工作,這種方式足以讓毫米波雷達(dá)呈現(xiàn)出清晰的360度全景圖像,還可以同時(shí)跟蹤上千目標(biāo)。推測(cè)12個(gè)79GHz毫米波雷達(dá)是做冗余系統(tǒng),毫米波雷達(dá)應(yīng)對(duì)復(fù)雜環(huán)境的能力最強(qiáng),最適合做冗余系統(tǒng),在激光雷達(dá)和攝像頭都失效的情況下,依然可以安全行駛到路邊停車。
NXP在2018年1月11日推出MR3003和S32R274就是典型的級(jí)聯(lián)設(shè)計(jì)方案,MR3003是一款3發(fā)4收的毫米波雷達(dá)收發(fā)器,NXP的級(jí)聯(lián)設(shè)計(jì)最低是級(jí)聯(lián)4個(gè)MR3003,達(dá)到12發(fā)16收,由S32R274做處理器,最多可支持高達(dá)20個(gè)MR3003級(jí)聯(lián),達(dá)到驚人的60發(fā)80收毫米波雷達(dá),足以成像。
所謂級(jí)聯(lián),實(shí)際類似MIMO。多輸人多輸出系統(tǒng)(MIMO,Multiple input multiple output)原本是控制系統(tǒng)中的一個(gè)概念,表示一個(gè)系統(tǒng)有多個(gè)輸入和多個(gè)輸出.如果將移動(dòng)通信系統(tǒng)的傳輸信道看成一個(gè)系統(tǒng),則發(fā)射信號(hào)可看成移動(dòng)信道(系統(tǒng))的輸入信號(hào),而接收信號(hào)可看成移動(dòng)信道的輸出信號(hào)。MIMO 雷達(dá)的基本含義是 :雷達(dá)采用多個(gè)發(fā)射天線,同時(shí)發(fā)射相互正交的信號(hào),對(duì)目標(biāo)進(jìn)行照射 ,然后用多個(gè)接 收天線接收目標(biāo)回波信號(hào)并對(duì)其進(jìn)行綜合處理,提取目標(biāo)的空間位置和運(yùn)動(dòng)狀態(tài)等信息。
MIMO雷達(dá)虛擬陣的一個(gè)典型應(yīng)用是用于雷達(dá)二維成像 ,雷達(dá)二維成像的距離分辨力 主要取決于雷達(dá)信號(hào)的帶寬 ,方位分辨力主要取決于天線的波束寬度。要提高成像的距離分辨力,需要增加雷達(dá)信號(hào)的帶寬是相對(duì)比較容易的。而要提高雷達(dá)信號(hào)的方位分辨力,需要增大天線或陣列的孔徑 ,而這在實(shí)際中受到多方面因素的限制,有很大的難度。 目前廣泛采用的解決辦法是采用合成孔徑技術(shù),在不增加天線物理尺寸的基礎(chǔ)上,得到大孔徑的陣列 。與合成孔徑的思想不同,MIMO 雷達(dá)是利用多發(fā)多收的天線結(jié)構(gòu)等效形成虛擬的大孔徑陣列,獲得方位上的高分辨力。 而這種虛擬陣的形成是實(shí)時(shí)的,能夠避免傳統(tǒng) 的 ISAR成像中存在的運(yùn)動(dòng)補(bǔ)償問(wèn)題。 故MIMO 雷達(dá)在成像應(yīng)用上有其獨(dú)特的優(yōu)勢(shì)。
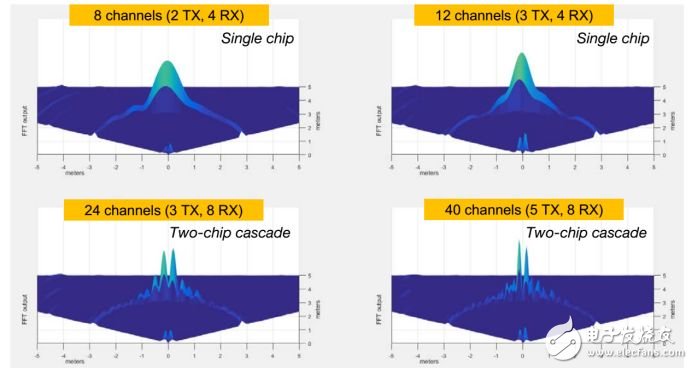
上圖為德州儀器測(cè)試的多片級(jí)聯(lián)雷達(dá)(MIMO)的FFT輸出圖,很明顯通道數(shù)越多,精細(xì)程度就越高。
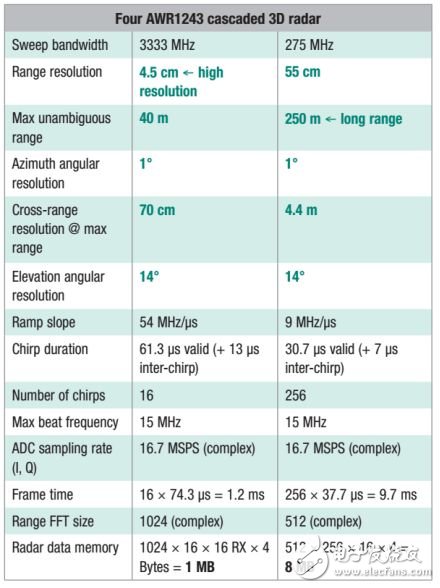
上表為德州儀器4個(gè)AWR1243級(jí)聯(lián)后雷達(dá)的參數(shù),遠(yuǎn)距離分辨力大大提高,40米處可以做到1度的方位角分辨率,也就是4.5厘米的精度和大約9厘米的物體分離精度。如果是百萬(wàn)像素45度FOV的攝像頭,那么40米處只有大約20像素的方位角分辨率,無(wú)法分清行人和騎行者。MIMO具備很寬的FOV,像德州儀器這種4個(gè)級(jí)聯(lián)的雷達(dá)FOV高達(dá)192度。而攝像頭的話80度的FOV 都算是廣角了,邊緣處可能有廣角失真。
一對(duì)發(fā)射陣元和接收陣元可以虛擬出一個(gè)收發(fā)陣元,則對(duì)于M發(fā)N收的MIMO雷達(dá) ,發(fā)射陣元和接收陣元共有M* N對(duì) ,即可以虛擬出 M *N個(gè)收發(fā)陣元 ,其個(gè)數(shù)一般是遠(yuǎn)遠(yuǎn)大于N的,從而實(shí)現(xiàn)了陣列孔徑的擴(kuò)展 。
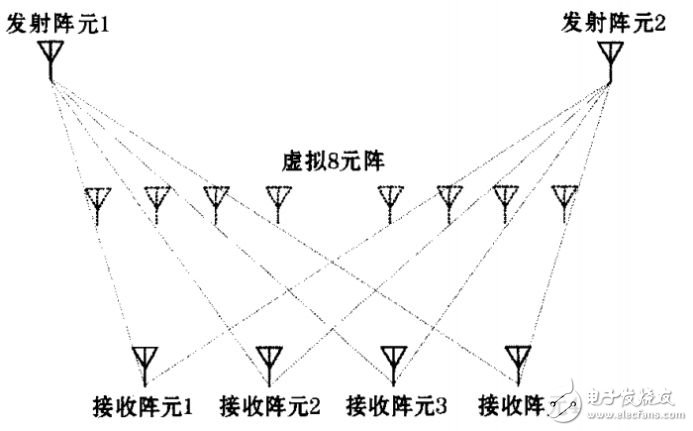
德州儀器使用4個(gè)3發(fā)4收的AWR1243雷達(dá),就是192個(gè)虛擬通道(天線或者叫陣列)。
攝像頭應(yīng)用
在自主導(dǎo)航局部路徑規(guī)劃方面,根據(jù)通用的描述,通用似乎是使用了自由空間(Free Space)法,這是通用與百度和谷歌最大的區(qū)別,百度和谷歌都使用柵格法。柵格法是目前應(yīng)用最廣泛,可靠性最高的一種局部路徑規(guī)劃。它是由w.E.Howden在1968年提出的。柵格法將機(jī)器人工作環(huán)境分解成一系列具有二值信息的網(wǎng)格單元,工作空間中障礙物的位置和大小一致,并且在機(jī)器人運(yùn)動(dòng)過(guò)程中,障礙物的位置和大小不發(fā)生變化。用尺寸相同的柵格對(duì)機(jī)器人的二維工作空間進(jìn)行劃分,柵格的大小以機(jī)器人自身的尺寸為準(zhǔn)。若某個(gè)柵格范圍內(nèi)不含任何障礙物,則稱此柵格為自由柵格;反之,稱為障礙柵格。自由空間和障礙物均可表示為柵格塊的集成。柵格的標(biāo)識(shí)方法有兩種:直角坐標(biāo)法和序號(hào)法。多采用四叉樹或八叉樹表示工作環(huán)境,并通過(guò)優(yōu)化算法完成路徑搜索。該方法以柵格為單位記錄環(huán)境信息,柵格粒度越小,障礙物的表示越精確,但同時(shí)會(huì)占用大量的存儲(chǔ)空問(wèn),算法的搜索范圍將按指數(shù)增加,會(huì)大量消耗運(yùn)算資源。 這種方法一般都配合64線機(jī)械旋轉(zhuǎn)激光雷達(dá),線數(shù)越高就可以劃分粒度越小。所以會(huì)出現(xiàn)128線激光雷達(dá)和蘋果那種12個(gè)16線激光雷達(dá),未來(lái)可能還有256線激光雷達(dá)。整體成本太高是柵格法主要缺點(diǎn)。
自由空間法采用預(yù)先定義的如廣義錐形和凸多邊形等基本形狀構(gòu)造自由空間,并將自由空間表示為連通圖,通過(guò)搜索連通圖來(lái)進(jìn)行路徑規(guī)劃。自由空間的構(gòu)造方法是:從障礙物的一個(gè)頂點(diǎn)開始,依次作其它頂點(diǎn)的鏈接線,刪除不必要的鏈接線,使得鏈接線與障礙物邊界所圍成的每一個(gè)自由空間都是面積最大的凸多邊形:連接各鏈接線的中點(diǎn)形成的網(wǎng)絡(luò)圖即為機(jī)器人可自由運(yùn)動(dòng)的路線。其優(yōu)點(diǎn)是比較靈活,起始點(diǎn)和目標(biāo)點(diǎn)的改變不會(huì)造成連通圖的重構(gòu),缺點(diǎn)是復(fù)雜程度與障礙物的多少成正比,且有時(shí)無(wú)法獲得最短路徑。自由空間法的分割需構(gòu)造想象邊界,想象邊界本身具有任意性,于是導(dǎo)致路徑的不確定性。
自由空間法優(yōu)點(diǎn)是不需要使用高線激光雷達(dá),單目即可,對(duì)運(yùn)算資源消耗也小,缺點(diǎn)是可靠性不高,有時(shí)無(wú)法得出路徑規(guī)劃,會(huì)出現(xiàn)暫時(shí)的停滯,或者會(huì)繞路,最重要一點(diǎn)是對(duì)光線非常敏感,在陽(yáng)光下的林蔭道,陽(yáng)光直射攝像頭,低照度環(huán)境,雨雪霧天無(wú)法使用。通用用激光雷達(dá)彌補(bǔ)了部分缺點(diǎn),同時(shí)在攝像頭周邊加上了紅外LED,增加對(duì)低照度環(huán)境適應(yīng)能力。同時(shí)有效距離也比較近,車速通常無(wú)法高于每小時(shí)100公里。英特爾與Mobileye陣營(yíng)對(duì)這種方法比較青睞。
通用車標(biāo)處的攝像頭應(yīng)該是主攝像頭,很有可能使用了索尼的IMX390CQV傳感器,這是一款1/2.7的CMOS感光元件,有效畫素是245萬(wàn),是目前像素最高的車載圖像傳感器,索尼在2017年10月發(fā)布的IMX324圖像傳感器性能更好,是目前全球公認(rèn)性能最佳,有效距離(誤差低于5%的距離)最遠(yuǎn)的圖像傳感器,但在2017年底才有樣品提供,相信通用暫時(shí)無(wú)緣使用。IMX324 是一款1/1.7-type的CMOS圖像傳感器,配備了742萬(wàn)行業(yè)最高有效分辨率的RCCC濾鏡,在FOV 32°鏡頭的幫助下能夠拍攝距離攝像頭160米遠(yuǎn)的路標(biāo),這是專為EyeQ4和 EyeQ5開發(fā)的傳感器,價(jià)格極高。不過(guò)即便是在窄鏡頭(35度以下已經(jīng)屬于窄視角,通常汽車的前視鏡頭是45度)下,有效距離也只有160米,如果是45度,有效距離是150米。而IMX390配合45度視角鏡頭,估計(jì)有效距離是65-75米。而64線激光雷達(dá)可以做到200米。不過(guò)電動(dòng)車在市區(qū)的速度不高。
通用的雙目攝像頭基線距離大約8厘米,有效距離很短,估計(jì)只有10-12米,應(yīng)該主要用來(lái)識(shí)別行人和騎車人。利用雙目快速識(shí)別行人和騎車人,奔馳和寶馬已經(jīng)在車上大量使用,是一項(xiàng)比較成熟的技術(shù)。這項(xiàng)技術(shù)當(dāng)然和深度學(xué)習(xí)無(wú)關(guān),深度學(xué)習(xí)最大的缺點(diǎn)就是消耗大量運(yùn)算資源,效率低下,比較慢。
這種技術(shù)稱為stixels,sticks above the ground in the image。指對(duì)圖片中地面以上的柱狀物體進(jìn)行建模,顯然,圖像中的樹木,人,海報(bào)之類的物體都可謂柱狀物。
這里所謂的stixels深度信息的底部,就是地面,頂部,就是行人的頭頂可能出現(xiàn)的大概位置。對(duì)于圖像中的每一列而言,底部像素,頂部像素,以及未分類物體之間的距離都被估算出來(lái)。這種方法的關(guān)鍵在于,利用stereo image可以直接計(jì)算出stixel,而無(wú)需計(jì)算所有的深度信息。在進(jìn)行行人檢測(cè)時(shí),對(duì)圖像中的地面和stixel進(jìn)行估計(jì),并設(shè)置stixel的高度為1.75m,在2010年就可在CPU上可以達(dá)到135fps的速度。而深度學(xué)習(xí)能做到30fps就需要GTX1080級(jí)顯卡了。Stixels的速度至少是深度學(xué)習(xí)的20倍以上。
車頂上的8個(gè)攝像頭是一套冗余設(shè)施,即使激光雷達(dá)和毫米波雷達(dá)都失效,車輛周圍的360度全景視頻依然可以得到。車內(nèi)后視鏡處的單目也是一套冗余系統(tǒng),就是L2級(jí)的AEB緊急剎車系統(tǒng)。
計(jì)算單元和其他
和谷歌無(wú)人車一樣,通用的無(wú)人車也使用兩套計(jì)算平臺(tái),保證一套失效,另一套可以無(wú)間斷接替其運(yùn)行。計(jì)算平臺(tái)位于后備箱里,同時(shí)也有兩套供電系統(tǒng),主電源通過(guò)電動(dòng)車本身的電池轉(zhuǎn)換為高壓供應(yīng)。注意,通用用了高壓這個(gè)詞,如果是英偉達(dá)的DRIVE PX2或其他車載專用計(jì)算平臺(tái),那么應(yīng)該是3到5.5伏的低壓,所以推測(cè)通用沒(méi)有使用英偉達(dá)的運(yùn)算平臺(tái)或其他車載專用計(jì)算平臺(tái),而是很有可能使用了工控機(jī),通常工控機(jī)的輸入電壓是直流24伏,相對(duì)5.5伏或車內(nèi)常見的12伏可以算高壓了。如果主電源失效,則啟動(dòng)備份電源。備份電源將供應(yīng)所有傳感器單元,執(zhí)行器和運(yùn)算單元。
通用無(wú)人車的首席工程師Andrew Farah透露第一代無(wú)人車的備份電源功率高達(dá)3千瓦。要知道第一代無(wú)人車只用了兩個(gè)32線激光類、不超過(guò)10個(gè)毫米波雷達(dá),不超過(guò)5個(gè)攝像頭。但是Andrew Farah未透露最新一代無(wú)人車也就是第四代無(wú)人車后備電源的功率,不過(guò)他堅(jiān)稱功率降低了,估計(jì)可能還要達(dá)到2千瓦。可以肯定這款電動(dòng)車的續(xù)航要因此減少。
百度則是雙管齊下,一臺(tái)是工控機(jī)(使用的是 Neousys Nuvo-6108GC,這是一款性能強(qiáng)大的 X86 解構(gòu)工業(yè)控制計(jì)算機(jī));另一臺(tái)則是英偉達(dá)用于自動(dòng)駕駛的 Drive PX2。
Nuvo-6108GC是***宸曜科技的工控機(jī),采用華碩GTX 1080 GPU顯卡,英特爾雙至強(qiáng)E5-2658 V3 12核CPU,1TB 2.5寸7200轉(zhuǎn)SATA硬盤(節(jié)約點(diǎn)啊,不用固態(tài))。
推測(cè)通用把主要精力都用在算法和傳感器上了,運(yùn)算平臺(tái)沒(méi)有花費(fèi)多少精力,未來(lái)肯定會(huì)用低功耗的嵌入式系統(tǒng)來(lái)代替,最有可能是兩片或四片瑞薩的R-CAR H3并聯(lián)使用,R-CAR H3是目前全球運(yùn)算性能最強(qiáng)的車規(guī)級(jí)SoC。屆時(shí)成本可以大幅度降低。
通用無(wú)人車的其他部分,電池,電機(jī)和電控部分都由韓國(guó)LG供應(yīng),制動(dòng)執(zhí)行器是博世的第二代iBooster,ESP也是博世的,轉(zhuǎn)向系統(tǒng)可能是中航集團(tuán)旗下的耐世特NEXTEER供應(yīng),攝像模組可能由加拿大麥格納提供。
摩根士丹利的分析師預(yù)計(jì)通用Bolt無(wú)人車的成本高達(dá)25-30萬(wàn)美元,我預(yù)計(jì)可能沒(méi)有那么高,但至少也是15萬(wàn)美元。顯然這不可能針對(duì)普通消費(fèi)者市場(chǎng)。只有出租車、共享出行或網(wǎng)約車市場(chǎng)對(duì)車購(gòu)置成本敏感度不高,對(duì)人工成本敏感度很高的領(lǐng)域才是無(wú)人車的主要市場(chǎng)。
綜合來(lái)看,通用無(wú)人車的技術(shù)水平仍然低于谷歌,甚至低于百度,但是通用的商業(yè)化進(jìn)程會(huì)遠(yuǎn)比谷歌和百度要快。傳統(tǒng)車企與IT類企業(yè)在無(wú)人車領(lǐng)域的技術(shù)差距是快速縮小,而傳統(tǒng)車企的商業(yè)化進(jìn)程只要下定決心,是要比IT類企業(yè)快得多。
上圖為豐田第三代無(wú)人車,用四個(gè)固態(tài)激光雷達(dá)取代了原先車頂?shù)?4線機(jī)械旋轉(zhuǎn)激光雷達(dá)。
上圖是豐田無(wú)人車的計(jì)算單元,可以看到非常小巧,完成度極高。這是技術(shù)最先進(jìn)完成度最高的無(wú)人車,遠(yuǎn)高于谷歌。傳統(tǒng)汽車巨頭一旦發(fā)力無(wú)人車,IT類企業(yè)將不再具有優(yōu)勢(shì)。











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論