倒車障礙檢測系統(tǒng)所采用的超聲波傳感器技術(shù)可以探測到附近的障礙物,為駕駛員提供倒車警告和輔助泊車功能,其原理是利用超聲波探測倒車路徑上或附近存在的任何障礙物,并及時發(fā)出警告。
2011-01-13 15:45:19 1684
1684 
針對激光傳感器在室外環(huán)境中檢測動態(tài)障礙物所遇到的數(shù)據(jù)處理存在延時、檢測結(jié)果準(zhǔn)確率不高等問題,提出了一種基于3維激光傳感器Velodyne和四線激光傳感器Ibeo信息融合的動態(tài)障礙物檢測及表示方法
2016-11-20 11:26:111520 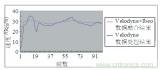
`交通燈控制系統(tǒng)實(shí)現(xiàn)紅綠燈、人行道以及左轉(zhuǎn)彎和右轉(zhuǎn)彎控制,并且根據(jù)檢測的車輛流量自動調(diào)整通行時間`
2014-06-06 17:50:48
檢測障礙物有什么什么傳感器,用紅外反射還是超聲波測距,或者還有其他傳感器?
2023-11-08 06:33:49
我們現(xiàn)在要做一個在高壓線上行走除冰的機(jī)構(gòu),需要檢測電線上的障礙并越障。檢測其中一種障礙時遇到了困難,求各位前輩們指點(diǎn),感激不盡!!!這種障礙物是防震錘,我上傳了實(shí)物圖和尺寸圖。圖中D=h=20mm
2014-04-02 19:03:10
的信息以及更多信息可用于管理和控制交通。例如,如果一輛汽車為了避開障礙物突然剎車,它可以向附近的車輛發(fā)送無線信息,通知他們當(dāng)前的情況。然后,這些車輛可以相應(yīng)地減速或改變車道。2v 為乘客提供了更高的安全
2022-03-07 10:08:27
導(dǎo)航控制、制動輔助和碰撞警報(bào)。奧迪的Pre Sense Front Plus是遠(yuǎn)端雷達(dá)系統(tǒng)實(shí)例,設(shè)計(jì)用于幫助避免或減少碰撞前方車輛后部的事故,無論前方車輛是移動中還是靜止的。短程雷達(dá)系統(tǒng)包括盲點(diǎn)檢測
2020-06-02 08:00:00
:行人/障礙物/車輛探測(PD) 傳感器:攝像機(jī)、雷達(dá)、IR七、系統(tǒng):駕駛員困倦報(bào)警 傳感器:車內(nèi) IR 攝像機(jī)高級駕駛輔助系統(tǒng)ADAS核心設(shè)計(jì)攻略高級駕駛輔助系統(tǒng)是利用安裝在車上的各式各樣傳感器,在汽車
2020-06-01 15:10:15
功能降低了駕駛員不遵守停車標(biāo)志等交通法規(guī)的可能,避免了違法左轉(zhuǎn)或者無意的其他交通違法行為,從而提高了安全性。這些系統(tǒng)需要靈活的軟件平臺來增強(qiáng)探測算法,根據(jù)不同地區(qū)的交通標(biāo)志來進(jìn)行調(diào)整。系統(tǒng):夜視傳感器
2020-06-02 07:30:00
,用以檢測車輛與障礙物的距離。有時,部分傳感器則用于盲點(diǎn)監(jiān)測和倒車車側(cè)警示系統(tǒng)。盲點(diǎn)檢測能夠做什么? 當(dāng)用戶將汽車倒出停車位的過程中,該系統(tǒng)會檢測后方是否有車輛經(jīng)過并提醒司機(jī)。 系統(tǒng)的側(cè)方傳感器將幫助車主
2014-08-03 17:46:24
。在這個過程中,車輛主動安全預(yù)警系統(tǒng)發(fā)揮著關(guān)鍵作用,通過及時的預(yù)警,可以避免90%的人類車輛事故。
為了實(shí)現(xiàn)車輛的主動安全,準(zhǔn)確識別行車障礙物并進(jìn)行距離檢測至關(guān)重要。在距離檢測領(lǐng)域,多種技術(shù)被用于解決這一
2023-12-19 18:02:07
的LDW,這項(xiàng)技術(shù)自動地將一個轉(zhuǎn)矩置于方向盤上,在無需任何駕駛員干預(yù)的情況下將車輛保持在車道的中間。行人檢測、前后碰撞避免、自適應(yīng)巡航控制,以及盲點(diǎn)輔助等是目前車輛上使用的其它ADAS應(yīng)用。支持
2018-09-11 14:39:35
不可及。但現(xiàn)在情況已經(jīng)大有改觀。現(xiàn)在,系統(tǒng)可以訪問這些歷史數(shù)據(jù),并將其與車輛傳感器提供的實(shí)時數(shù)據(jù)相結(jié)合,以提供越來越準(zhǔn)確的預(yù)防性措施,避免發(fā)生事故。例如,IMU可以檢測到因坑洼或障礙物引起的突然躍起或
2020-06-16 18:53:55
的方式來進(jìn)行融合避障導(dǎo)航。 但,是不是機(jī)器人產(chǎn)品上安裝的傳感器越多,就越能有效檢測障礙物并規(guī)避呢? 理論上,機(jī)器人上安裝的傳感器種類和數(shù)量越多,導(dǎo)航定位系統(tǒng)就越能有效的檢測出環(huán)境中的風(fēng)險和障礙物
2018-08-27 17:19:46
本文提出的基于無線定位技術(shù)的車輛檢測系統(tǒng)將通過在實(shí)用道路交通設(shè)施頻率高、能反映交通特征的出租車和公交車上部署車載移動定位裝置,將其作為動態(tài)交通參數(shù)采集車輛,測量車輛實(shí)時地理坐標(biāo),計(jì)算車輛行駛速度,并結(jié)合智能交通地理信息系統(tǒng),為交通控制提供實(shí)時交通信息、交通態(tài)勢和交通評估參數(shù)等。
2021-05-18 06:42:13
,并在車輛遠(yuǎn)離時切換回原始狀態(tài)。HBA對經(jīng)常會在夜間行駛的駕駛者來說具有顯著的實(shí)際效用。? TSR (Traffic Sign Recognition)道路交通標(biāo)志識別系統(tǒng)TSR是一種提前識別和判斷
2015-07-09 14:16:04
、提取感興趣的點(diǎn)(特征檢測)。就是把我們感興趣的物體分割出來,針對導(dǎo)航、定位來說就是把機(jī)器人前面的障礙物找到。這種應(yīng)用在特征點(diǎn)提取這部分的特點(diǎn)是:需要提取的特征點(diǎn)較少、提取速度要求高。具體速度需要
2013-11-21 16:20:51
的時間,這點(diǎn)對于駕駛員在緊急情況下的操控是至關(guān)重要的。 對于方向控制,勢場算法提供了道路的生成。完成道路計(jì)算后,系統(tǒng)指示駕駛員如何轉(zhuǎn)向保持車輛方向以及回避障礙物。駕駛員通過耳機(jī)和LabVIEW語音合成
2019-05-21 07:40:17
通過攝像頭對周圍環(huán)境信息的實(shí)時采集,如果當(dāng)鏡頭前方出現(xiàn)障礙物時候,以一定的方式(聲音或振動之類的)反饋出來。主要考慮的是實(shí)現(xiàn)盲人室內(nèi)導(dǎo)盲作用,不需要太過于考慮實(shí)際使用,只要能實(shí)現(xiàn)判定到障礙物,自動提醒就行啦。怎么判定前方出現(xiàn)障礙物,一直困擾著我。求大神指個思路,能有程序框圖就更好了
2017-03-14 07:58:55
我想要做一個道路障礙物檢測系統(tǒng)。就是在路面上安一個檢測器,一旦有障礙物擋住,且在路上停留一段時間,就發(fā)射信號報(bào)警,使二極管發(fā)光。現(xiàn)在我想請教一下是不是檢測用紅外線好一點(diǎn),延時用單片機(jī)程序大概要怎么寫?電路什么的怎么連啊?求大神解答
2015-03-10 13:33:26
什么是基于超聲波傳感器的倒車障礙檢測系統(tǒng)呢?如何去設(shè)計(jì)一種汽車倒車障礙檢測系統(tǒng)?
2021-05-14 06:20:54
本文采用小波分析和模式識別方法分析車輛噪聲信號,設(shè)計(jì)了一種基于DSP的車輛碰撞聲檢測裝置,該裝置能有效檢測車輛碰撞事件,實(shí)現(xiàn)交通事故的自動識別。相對于已有交通事故檢測裝置具有識別率高、實(shí)時性強(qiáng)的優(yōu)點(diǎn),而且價格較低。
2021-05-12 06:32:52
的形狀和周圍環(huán)境,結(jié)合SLAM算法和視覺傳感器,進(jìn)行SLAM避障與導(dǎo)航。圖源:Science Robotics障礙物規(guī)避A1激光雷達(dá)通過不斷的旋轉(zhuǎn),發(fā)射激光出去,接受激光返回,算出障礙物距離當(dāng)前的距離
2021-11-12 14:12:43
駕駛員提供了方便。倒車時當(dāng)汽車與障礙物的距離小于我們所設(shè)定的安全距離時,系統(tǒng)便通過語音集成電路發(fā)出報(bào)警,提醒駕駛員,防止汽車的碰撞或擦傷,具有很強(qiáng)的實(shí)用性。
2021-05-14 06:04:41
測入式疲勞檢系統(tǒng)對避免交通事故的發(fā)生具有重大的現(xiàn)實(shí)意義。疲勞駕駛是指駕駛員在心理、生理上發(fā)生變化引起駕駛能力降低目前,駕駛疲勞檢測方法分為以下三類:基于生理信號檢測技術(shù)、基于車輛運(yùn)動參數(shù)檢測技術(shù)
2021-12-22 08:10:01
電模塊來檢測是否有人體靠近。該防碰撞系統(tǒng)通過對模塊返回的數(shù)據(jù)分析然后通過無源蜂鳴器進(jìn)行報(bào)警提示,提示車主障礙物的出現(xiàn)以及時地做出反應(yīng)。關(guān)鍵詞:STM32雙模式超聲波熱釋電報(bào)警車輛的增多使得交通事故頻頻發(fā)生,全球每年由交通事故造成的人員和財(cái)產(chǎn)引言車輛的增多使得交通事故頻頻發(fā)生,全球
2021-08-06 08:52:59
開發(fā)的全自動駕駛交通工具都依賴激光探測和測距技術(shù)(激光雷達(dá))來感知世界并繪制地圖。這些地圖為無人駕駛汽車提供重要信息,利用其傳感系統(tǒng)和計(jì)算系統(tǒng)重點(diǎn)關(guān)注汽車、行人和自行車等障礙物的信息。然而,激光雷達(dá)
2017-10-23 17:51:41
的儀器,通過它們來感知公路的限速和路旁交通標(biāo)志,以及周圍的車子移動情況,并只需借助地圖來導(dǎo)航完成車輛自動行駛。無人駕駛從某種程度上來說比人工駕駛更加安全。其GPS及數(shù)字地圖,可以確定車輛自身的位置及目的地
2014-11-11 11:21:30
大量的算力,也需要多種類型的計(jì)算資源,典型的智能駕駛系統(tǒng)處理流程如下。它接收并處理原始傳感器信號,對車周環(huán)境進(jìn)行實(shí)時的在線感知,其中包括對道路結(jié)構(gòu)、車道線等靜態(tài)元素,以及車輛、行人等動態(tài)障礙物的檢測識別
2022-08-11 15:55:37
;道路狀況信息系統(tǒng),由交通管理中心提供實(shí)時的前方道路狀況信息,如堵車、事故等,必要時及時改變行駛路線;車輛防碰系統(tǒng),包括探測雷達(dá)、信息處理系統(tǒng)、駕駛控制系統(tǒng),控制與其他車輛的距離,在探測到障礙物時及時
2016-02-01 12:23:08
相機(jī)外加超聲波等傳感器的方式來進(jìn)行融合避障導(dǎo)航: 但,是不是機(jī)器人產(chǎn)品上安裝的傳感器越多,就越能有效檢測障礙物并規(guī)避呢? 理論上,機(jī)器人上安裝的傳感器種類和數(shù)量越多,導(dǎo)航定位系統(tǒng)就越能有效的檢測
2018-08-27 15:44:02
棒性,如融合衛(wèi)星定位導(dǎo)航(GNSS) 、慣性導(dǎo)航(INS)、視覺 SLAM、激光雷達(dá) SLAM 等技術(shù)來實(shí)現(xiàn)車輛的定位。融合毫米波雷達(dá)、攝像頭、激光雷達(dá)、聲波雷達(dá)等技術(shù)實(shí)現(xiàn)道路障礙物信息檢測。毫米波
2020-07-01 14:16:38
本帖最后由 gk320830 于 2015-3-8 14:20 編輯
急需用到2米內(nèi)障礙物感應(yīng)器,帶開關(guān)功能或者高手幫忙設(shè)計(jì)個輔助開關(guān)電路,24V電源供電,多謝
2013-03-07 21:58:40
1100道試題),可以隨機(jī)出題考試以可以依次考試每套試題。與現(xiàn)有無紙化考試系統(tǒng)最大的區(qū)別在于:無紙化考試試題集成在駕駛模擬器系統(tǒng)之中,可以利用模擬器進(jìn)行。 14 交通標(biāo)志、標(biāo)線及交通法規(guī) 交通標(biāo)志
2012-09-06 17:48:26
車道偏離引起的傷亡事故。 原理功能根據(jù)(美國)國家公路交通安全管理局的定義,車道偏離預(yù)警系統(tǒng)是指一種通過報(bào)警的方式輔助駕駛員避免或者減少車道偏離事故的系統(tǒng)。一個車道偏離預(yù)警系統(tǒng)不會試圖控制車輛以防
2018-11-06 09:23:12
裝配在汽車上后,能結(jié)合本車的速度自動判斷車前方的障礙物,當(dāng)車輛前方出現(xiàn)障礙物對本車構(gòu)成威脅時,他能自動報(bào)警,提醒駕駛人員注意,駕駛員就能及時采取相應(yīng)的措施。 駕駛員未聽到報(bào)警或聽到報(bào)警未采取措施或
2012-04-25 16:39:57
本畢業(yè)設(shè)計(jì)要求設(shè)計(jì)一個汽車防撞測距報(bào)警器, 能檢測出汽車前后左右四個方向的障礙物并發(fā)出報(bào)警信號。要求能檢測出前方障礙物的距離,并用數(shù)字顯示給駕駛員,在危險距離時要發(fā)出急促的報(bào)警聲。該裝置由檢測電路
2013-07-21 21:58:27
是一個負(fù)責(zé)開放共享的態(tài)度,加快整個無人駕駛商業(yè)化落地。整個普羅米修斯計(jì)劃的模塊還是基于激光雷達(dá)能夠做什么事來進(jìn)行的,包括:定位、車道線檢測、路沿檢測、障礙物識別、障礙物分類與跟蹤的算法模塊。不管是低速
2017-09-08 17:24:48
用labview設(shè)計(jì)超級馬里奧游戲時如何加障礙物
2017-05-09 13:33:15
最近,我和我的一個朋友進(jìn)行了一次有趣的討論,他知道我在研究用于ADAS系統(tǒng)和自動駕駛車輛(AVs)中雷達(dá)的TI毫米波(mmWave)傳感器。每當(dāng)他讀到自動駕駛汽車在不同駕駛環(huán)境下(比如障礙物檢測
2022-11-09 07:48:50
1.疲勞檢測智能預(yù)警應(yīng)對方案:飛瑞斯科技利用多年來在生物識別的技術(shù)積累,結(jié)合車輛的當(dāng)前行駛速度(GPS),針對駕駛員的眼睛進(jìn)行實(shí)時的判斷分析,通過對人眼的閉合狀態(tài),判定被檢測人員的疲勞程度。針對可能
2012-10-19 17:45:49
我現(xiàn)在需要使用紅外檢測一個比較小的障礙物,直徑兩厘米,黑色,金屬。很多紅外檢測模塊的賣家都不確定可以檢測的到,我現(xiàn)在有一個想法,不知道可不可行。我想檢測不到應(yīng)該是因?yàn)檫@個障礙物對紅外的反射比較
2014-04-03 11:28:56
展示在市區(qū)的自動駕駛情境。這臺由光達(dá)、定位系統(tǒng)和攝影機(jī)組成的自動駕駛車,在車輛偏離車道時可自動導(dǎo)回車道。三種系統(tǒng)的作用優(yōu)先級,第一是光達(dá),不僅可以偵測障礙物,還可以“識別”。例如,當(dāng)識別出前方障礙物為
2017-05-15 17:49:20
本帖最后由 gk320830 于 2015-3-8 20:36 編輯
設(shè)計(jì)完P(guān)CB后走線不能躲避障礙物時什么情況?已經(jīng)設(shè)置了躲避障礙物還是不能躲避
2012-12-20 08:47:57
Infrared Proximity Sensor如何檢測前方是否有障礙物
2020-11-06 07:57:22
近幾年,越來越多的高檔進(jìn)口車度就得到二倍的聲源與障礙物之間的距離,即 會將該配置列為標(biāo)配,甚至出現(xiàn)在了國產(chǎn)車上。限速識別系統(tǒng)在高速公路某些路段進(jìn)行限速是經(jīng)常出現(xiàn)的情況,但是道路旁的標(biāo)志牌卻不容易總是被
2017-10-31 11:25:04
超聲波主要用于泊車測距、輔助剎車等,量程較短等,然而在倒車輔助過程中,超聲波傳感器通常需同控制器和顯示器結(jié)合使用,從而以聲音或者更為直觀的顯示告知駕駛員周圍障礙物的情況,解除駕駛員泊車、倒車和起動車輛時前后左右探視所引起的困擾,并幫助駕駛員掃除視野死角和視線模糊的缺陷,提高駕駛安全性。
2020-08-18 07:13:24
` 本帖最后由 shidaikeji 于 2013-5-26 11:43 編輯
最近看見沃爾沃 騎車人檢測系統(tǒng),號稱第一次做的,本人好幾年前也有在做這方面的研究,現(xiàn)先將車輛檢測發(fā)布,后期
2013-05-26 11:39:50
內(nèi)容提綱:ADAS系統(tǒng)包括車輛檢測、行人檢測、交通標(biāo)志識別、車道線檢測等多種任務(wù),同時,由于無人駕駛等應(yīng)用場景的要求,車載視覺系統(tǒng)還應(yīng)具備相應(yīng)速度快、精度高、任務(wù)多等要求。對于傳統(tǒng)的圖像檢測與識別
2020-06-04 07:00:00
、車道標(biāo)識線檢測、障礙物檢測、動態(tài)物體跟蹤、障礙物分類識別等六大功能模塊,有助于自動駕駛車輛立刻獲得LiDAR感知能力。今年4月份,速騰聚創(chuàng)宣布啟動“普羅米修斯”計(jì)劃,致力于向合作伙伴提供一系列軟硬件
2017-10-13 16:08:29
遇障礙物時語音提示前方危險,請注意。語音模塊是isd1820單片機(jī)51 求幫忙
2017-02-24 21:43:00
為什么有些東西,遇到障礙物會自動返回,是哪一種傳感器嗎?哪里有沒有這類的電路圖介紹下,非常感謝
2011-09-10 21:14:25
干擾;其次,腦電圖容易受外界因素的干擾且個體間的生理反映差距較大,價格過高,因此難以在實(shí)際中使用。非接觸式檢測主要是通過非接觸的傳感器檢測駕駛員身體特征變化或車輛狀態(tài)來檢測疲勞駕駛情況。據(jù)美國國家公路交通
2014-04-17 14:38:44
上實(shí)驗(yàn)要求很嚴(yán)格,且成本很高,所以系統(tǒng)開發(fā)階段,在實(shí)驗(yàn)室模擬檢測列車的探傷作業(yè)十分重要,其對設(shè)備調(diào)試有很大幫助。本文提出的機(jī)器視覺系統(tǒng)包括模擬鋼軌探傷作業(yè)平臺、高速工業(yè)相機(jī)、輔助光源和處理主機(jī)。機(jī)器
2014-04-18 15:47:51
,避免了違法左轉(zhuǎn)或者無意的其他交通違法行為,從而提高了安全性。這些系統(tǒng)需要靈活的軟件平臺來增強(qiáng)探測算法,根據(jù)不同地區(qū)的交通標(biāo)志來進(jìn)行調(diào)整。 系統(tǒng):夜視傳感器:IR或者熱成像攝像機(jī)夜視(NV)系統(tǒng)幫助駕駛
2018-11-07 15:49:31
僅對150m以上的彎道半徑做性能要求。自適應(yīng)巡航定速控制系統(tǒng)的雷達(dá)傳感器如果只能檢測車輛前面狹窄的錐形區(qū)域內(nèi)的物體,那么,對障礙物的檢測可能會受到限制。系統(tǒng)可能無法及時制動,或有可能意外制動。如果其他
2019-04-03 00:01:51
匯編語言程序設(shè)計(jì)案例1—動態(tài)顯示/障礙物檢測/障礙物方位檢測
10-1. LED數(shù)碼管顯示原理10-2. 案例分析1(2位學(xué)號顯示)10-3. 案例分析2(簡易按鍵搶答)10-4.
2009-03-23 12:15:35 38
38 本文提出了對道路標(biāo)志進(jìn)行快速別的一種輔助系統(tǒng),該系統(tǒng)以人類的視覺及思維模式作為藍(lán)本,可以較為快速的實(shí)現(xiàn)行進(jìn)汽車中的交通標(biāo)志識別。這一系統(tǒng)通過安裝在汽車上的攝
2009-06-06 14:35:1413 交通標(biāo)志的結(jié)構(gòu)設(shè)計(jì)采用有限元分析法進(jìn)行優(yōu)化設(shè)計(jì),能夠讓交通標(biāo)志結(jié)構(gòu)的穩(wěn)定性更加符合交通安全性要求,同時使結(jié)構(gòu)外觀和公路環(huán)境相協(xié)調(diào)。本文對常規(guī)有限元法和精確有
2009-09-15 15:31:1018 實(shí)用交通標(biāo)志自動識別方法::交通標(biāo)志的自動識別對于導(dǎo)航電子地圖數(shù)據(jù)采集和更新效率的提高有著重要的應(yīng)用價值.通過對交通標(biāo)志影像的特征分析,在RGB模型的基礎(chǔ)上,使用自
2009-10-31 14:14:5218 對自然場景下的交通標(biāo)志進(jìn)行準(zhǔn)確的識別分類,是智能汽車的重要組成部分。交通標(biāo)志本身數(shù)量眾多,其形態(tài)復(fù)雜,而自然場景下存在著光照變化、褪色污損、扭曲變形等情況對交通標(biāo)
2010-02-21 10:57:4015 三角形交通標(biāo)志的智能檢測方法
基于交通標(biāo)志都具有一定的顏色和形狀,以紅色倒三角形交通標(biāo)志為例,介紹一種新的智能檢測方法。該方法主要由以下4個環(huán)節(jié)構(gòu)成
2010-02-23 09:20:4211 本文提出了對道路標(biāo)志進(jìn)行快速別的一種輔助系統(tǒng),該系統(tǒng)以人類的視覺及思維模式作為藍(lán)本,可以較為快速的實(shí)現(xiàn)行進(jìn)汽車中的交通標(biāo)志識別。這一系統(tǒng)通過安裝在汽車上的攝像
2010-07-13 18:01:0123 一種基于圖像分割和立體視覺相結(jié)合的障礙物檢測方法。通過分割提取出了障礙物的大致形體并濾去地面上的冗余信息,這樣就把立體視覺避障中匹配區(qū)域縮小到有用的障礙物區(qū)
2010-10-18 16:08:0827 1.1 交通標(biāo)志標(biāo)線的設(shè)置原則1.1.1 依據(jù)標(biāo)志、標(biāo)線的設(shè)置應(yīng)以道路交通管理的相關(guān)法律、法規(guī)、技術(shù)規(guī)范(標(biāo)準(zhǔn))和交通組織管理方案為依據(jù),分清路權(quán)、促進(jìn)暢通、預(yù)防事
2010-11-04 17:32:0135 障礙物檢測實(shí)驗(yàn)
一、實(shí)驗(yàn)?zāi)康摹靶L(fēng)”小車在運(yùn)動過程中要成功避開障礙物必須在一定距離外就探測到障礙物。在小車上探測障礙物
2009-03-23 10:47:292348 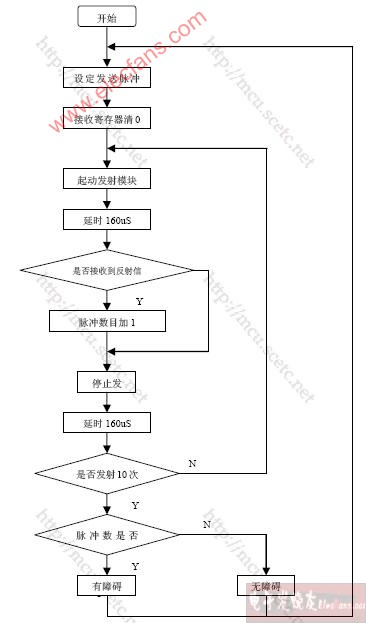
障礙物方位檢測實(shí)驗(yàn)
一、實(shí)驗(yàn)?zāi)康男≤囋谶\(yùn)動中要成功避開障礙物,除了要檢測是否有障礙物外,還需要判斷障礙物的方位,以便小
2009-03-23 10:48:531843 
輔助防護(hù)系統(tǒng)(SRS),輔助防護(hù)系統(tǒng)(SRS)是什么意思
高速行駛在公路上的客車與障礙物或其他車輛相撞時,駕駛員和乘客的生命安全
2010-03-10 17:17:5511582 論文以基于機(jī)器視覺的道路識別與障礙物檢測為研究對象采用動態(tài)圖像處理技術(shù)為行駛車輛提供環(huán)境狀態(tài)信息及車輛行駛狀態(tài)信息綜合利用車輛的當(dāng)前行駛車道狀態(tài)(彎道或者直道)和距離
2012-04-25 14:58:5580 移動機(jī)器人的
障礙物群
檢測方法!資料來源網(wǎng)絡(luò),如有侵權(quán),敬請?jiān)彛?/div>
2015-12-25 09:49:4217 基于線性CCD視覺信息的道路交通標(biāo)志識別系統(tǒng),適用于圖像識別類。
2016-04-28 09:49:096 三角形交通標(biāo)志的智能檢測方法_朱雙東
2017-02-07 15:17:360 移動機(jī)器人可借助交通標(biāo)志牌進(jìn)行定位,文中提出了一種基于顏色分割和局部LPT變換的交通標(biāo)志牌檢測算法。首先利用交通標(biāo)志牌的顏色特征預(yù)分割出潛在的交通標(biāo)志區(qū)域,然后通過局部LPT空間變換,然后根據(jù)變換后的圖像特征進(jìn)行形狀檢測,檢測出圓形的交通標(biāo)志牌。實(shí)驗(yàn)結(jié)果表明了算法的有效性。
2017-11-15 15:58:202 %。 交通標(biāo)志是道路基礎(chǔ)設(shè)施的重要組成部分,它們?yōu)榈缆肥褂谜咛峁┝艘恍╆P(guān)鍵信息,并要求駕駛員及時調(diào)整駕駛行為,以確保遵守道路安全規(guī)定。如果沒有交通標(biāo)志,可能會發(fā)生更多的事故,因?yàn)樗緳C(jī)無法獲知最高安全速度是多少,不了
2017-11-22 11:52:242 交通標(biāo)志(Traffic Sign)是交通管控系統(tǒng)的重要組成部分,為駕駛員提供路況、交通管制、警告和提醒等信息。交通標(biāo)志檢測(Traffic Sign Detection,TSD)作為現(xiàn)代智能交通領(lǐng)域的重要研究課題,在無人駕駛技術(shù)、輔助駕駛技術(shù)、智能機(jī)器人等領(lǐng)域有關(guān)鍵作用。
2017-11-29 11:36:181 基于計(jì)算機(jī)視覺的動態(tài)障礙物檢測在汽車輔助駕駛系統(tǒng)中具有重要應(yīng)用價值,其利用車載攝像機(jī)獲取車前一定范圍內(nèi)的視頻圖像檢測障礙物,從而估計(jì)出潛在的危險以便采取安全策略避免交通事故。但在行車過程中,車速
2018-01-18 15:31:061 近年來,無人車成為熱門研究方向。障礙物檢測是無人車研究中的一個重要組成部分,無人車行駛的環(huán)境主要包括結(jié)構(gòu)化道路(城市街道、高等級公路)和非結(jié)構(gòu)化道路(越野道路)。障礙物主要分為正障礙和負(fù)障礙,正障礙
2018-02-01 16:14:466 據(jù)外媒報(bào)道,日本電裝研發(fā)了一款視覺傳感器 ,可在夜間檢測行人、自行車、道路標(biāo)志、車道和其它道路使用者。 新款視覺傳感器可與毫米波雷達(dá)傳感器結(jié)合使用,當(dāng)檢測到障礙物時,自動啟動車輛緊急制動系統(tǒng),可減少交通
2018-04-19 20:35:001521 以前提過單目測距的問題,檢測的障礙物2-D框加上攝像頭的姿態(tài)和路面假設(shè)。
2019-06-13 17:19:527592 
視覺傳感器具有車道線識別、障礙物檢測、交通標(biāo)志和地面標(biāo)志識別、交通信號燈識別、可行空間檢測等功能。
2019-07-31 10:51:492717 探測”(Barrier detection)系統(tǒng),能夠利用激光雷達(dá)探測車輛路徑上的障礙物。 專利文件中寫道:“激光雷達(dá)數(shù)據(jù)可為自動駕駛車輛控制器所用,用于探測車輛環(huán)境中的物體,而且此類信息可用在動態(tài)環(huán)境中,為車輛提供導(dǎo)航以及運(yùn)動規(guī)劃。”蘋果“障礙物探測
2020-12-10 16:09:041811 電子發(fā)燒友網(wǎng)站提供《使用IR模塊的障礙物檢測器.zip》資料免費(fèi)下載
2022-11-14 11:31:220 電子發(fā)燒友網(wǎng)站提供《障礙物檢測和顏色跟隨機(jī)器人的創(chuàng)建.zip》資料免費(fèi)下載
2022-12-23 15:22:200 目標(biāo)識別與分類 - 目前普通的3D毫米波雷達(dá)僅可以檢測到前方是否有障礙物,而無法精準(zhǔn)識別障礙物的大小和類別;例如:各類車道線識別、紅綠燈識別以及交通標(biāo)志識別等;
2023-05-12 09:24:28422 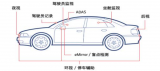
基于點(diǎn)云的3D障礙物檢測 主要有以下步驟: 點(diǎn)云數(shù)據(jù)的處理 基于點(diǎn)云的障礙物分割 障礙物邊框構(gòu)建 點(diǎn)云到圖像平面的投影 點(diǎn)云數(shù)據(jù)的處理 KITTI數(shù)據(jù)集 KITTI數(shù)據(jù)集有四個相機(jī),主要使用第三個
2023-06-26 10:22:38496 
編輯注:NVIDIA 自動駕駛實(shí)驗(yàn)室系列視頻,將以工程技術(shù)為重點(diǎn)的視角關(guān)注實(shí)現(xiàn)自動駕駛汽車的各個挑戰(zhàn)以及 NVIDIA DRIVE AV 軟件團(tuán)隊(duì)如何應(yīng)對這些問題。 自動泊車輔助系統(tǒng)在感知障礙物
2023-07-13 21:15:01426 
汽車超聲波雷達(dá)通常用于倒車輔助系統(tǒng),可以檢測到車輛周圍的障礙物和障礙物的距離。當(dāng)車輛靠近障礙物時,雷達(dá)會發(fā)出警告信號(如聲音或視覺警告),幫助駕駛員避免碰撞。
2023-11-23 16:52:444033 已全部加載完成
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論