首先通過(guò)移動(dòng)機(jī)器人視覺定位與目標(biāo)跟蹤系統(tǒng)求出目標(biāo)質(zhì)心特征點(diǎn)的位置時(shí)間序列,然后在分析二次成像法獲取目標(biāo)深度信息的缺陷的基礎(chǔ)上,提出了一種獲取目標(biāo)的空間位置和運(yùn)動(dòng)信息的方法。##目標(biāo)的獲取即在攝像機(jī)采集的圖像中搜索是否有特定目標(biāo),并提取目標(biāo)區(qū)域,給出目標(biāo)在圖像中的位置特征點(diǎn)。
2014-12-29 14:23:07 17649
17649 誰(shuí)能幫我的2012版本的labview,下個(gè)imaqvision,怎么下載,在面板上都找不到視覺與運(yùn)動(dòng)的那幾個(gè)控件,誰(shuí)能幫我解決這個(gè)問題,必有重謝!
2017-09-07 22:03:16
視覺與運(yùn)動(dòng)_讀取CDR(股票現(xiàn)價(jià)與市凈率) 無(wú)聊做了個(gè) 讀取CDR vi來(lái)幫我完成股票數(shù)據(jù)收集!
2020-07-22 23:21:02
基于雙DSP的運(yùn)動(dòng)目標(biāo)智能跟蹤系統(tǒng)是怎樣設(shè)計(jì)并實(shí)現(xiàn)的?
2021-04-27 06:59:18
編程語(yǔ)言。我們公司是通過(guò)調(diào)用DLL動(dòng)態(tài)鏈接庫(kù)連調(diào)用運(yùn)動(dòng)控制卡的驅(qū)動(dòng),除了會(huì)使用運(yùn)動(dòng)控制卡之外,還需要學(xué)習(xí)步進(jìn)電機(jī)和伺服電機(jī)的相關(guān)知識(shí)。由于這方面涉及公司的知識(shí)產(chǎn)權(quán),所以不方便和大家分享,抱歉。關(guān)于視覺
2015-02-10 11:30:19
剛剛接觸使用 Labview 做視覺與運(yùn)動(dòng)這個(gè)模塊,誰(shuí)有簡(jiǎn)單案例,可以共享下!{:23:}{:23:}
2013-04-10 19:44:02
同時(shí)安裝labview 2012 和labview2014 以及VAS模塊,在NI MAX中可以調(diào)用攝像頭,在LB2012中可以看見視覺運(yùn)動(dòng)模塊,但在LB2014中沒有視覺運(yùn)動(dòng)模塊,求解
2018-12-30 09:33:44
labview 視覺與運(yùn)動(dòng)視頻教程誰(shuí)有啊 求大神指點(diǎn)可以的話qq聊
2013-08-02 21:05:55
有誰(shuí)知道哪位博主labview視覺與運(yùn)動(dòng)比較精通?
2013-08-03 09:54:06
求labview2013 視覺與運(yùn)動(dòng)工具包
2015-07-18 13:08:13
我已安裝運(yùn)動(dòng)與視覺模塊,但是安裝QHYCCD的IMG1S無(wú)法調(diào)用,驅(qū)動(dòng)都正常,請(qǐng)問這是什么原因呀?{:2:},小弟先謝過(guò)各位大神
2015-03-19 18:05:13
哪位哥知道,我labview程序框圖中沒有視覺與運(yùn)動(dòng),里面空白
2019-06-04 19:33:26
什么是SFS陰影重建視覺技術(shù)?如何處理運(yùn)動(dòng)中目標(biāo)物的檢測(cè)?SFS陰影重建技術(shù)的優(yōu)勢(shì)是什么?
2021-06-01 06:10:16
產(chǎn)品或設(shè)定區(qū)域進(jìn)行視覺成像,將其圖像信息通過(guò)專用的圖像處理軟件進(jìn)行處理,根據(jù)處理結(jié)果,軟件自動(dòng)判斷產(chǎn)品的位置、尺寸、外觀信息,并根據(jù)人為預(yù)先設(shè)定的標(biāo)準(zhǔn)進(jìn)行合格與否的判斷,輸出其判斷信息給執(zhí)行機(jī)構(gòu),實(shí)現(xiàn)
2020-05-27 14:33:42
像素點(diǎn)賦予一個(gè)速度矢量的方法建立光流場(chǎng),利用光流場(chǎng)中矢量運(yùn)動(dòng)的連續(xù)性來(lái)檢測(cè)移動(dòng)目標(biāo)。該方法的計(jì)算量通常很大,難以實(shí)現(xiàn)實(shí)時(shí)性的檢測(cè)。2 FPGA實(shí)現(xiàn)本節(jié)實(shí)驗(yàn)將實(shí)現(xiàn)對(duì)鏡頭內(nèi)移動(dòng)物體(無(wú)論變大變小左右
2018-08-10 09:15:05
和大小,得到當(dāng)前幀中目標(biāo)的尺寸和質(zhì)心位置。在介紹Intel公司的開源OpenCV計(jì)算機(jī)視覺庫(kù)的基礎(chǔ)上,采用CAMSHIFT跟蹤算法,實(shí)現(xiàn)運(yùn)動(dòng)目標(biāo)跟蹤,解決了跟蹤目標(biāo)發(fā)生存在旋轉(zhuǎn)或部分遮擋等復(fù)雜情況下的跟蹤
2014-12-23 14:21:51
視頻目標(biāo)跟蹤,本文將首先向大家介紹常用的粒子濾波視頻目標(biāo)跟蹤算法,對(duì)其原理進(jìn)行簡(jiǎn)單的分析,為后續(xù)進(jìn)一步選擇和應(yīng)用算法實(shí)現(xiàn)目標(biāo)跟蹤提供基礎(chǔ)。一、機(jī)器視覺及相關(guān)理論及OpenCv 機(jī)器視覺是人工智能領(lǐng)域正在
2018-09-21 10:42:31
本課題所介紹的運(yùn)動(dòng)目標(biāo)警示系統(tǒng),主要是以單片機(jī)為控制核心,結(jié)合雷達(dá)超聲波傳感器、通訊和數(shù)字電子電路技術(shù),實(shí)現(xiàn)了對(duì)監(jiān)控環(huán)境內(nèi)運(yùn)動(dòng)目標(biāo)的監(jiān)測(cè)及警示,避免了
2013-10-28 09:52:30
有效的算法,現(xiàn)階段感興趣區(qū)域的檢測(cè)和提取大多基于感興趣區(qū)域所具有的低層特征。 對(duì)圖像ROI的提取,一般從兩方面著手解決:一是利用圖像分割技術(shù)提取ROI;另外一個(gè)就是從人眼的視覺特性出發(fā),通過(guò)模擬人眼的視覺
2019-04-23 08:30:00
怎么實(shí)現(xiàn)基于SOPC的運(yùn)動(dòng)視覺處理系統(tǒng)的設(shè)計(jì)?
2021-06-04 06:33:28
想要視覺與運(yùn)動(dòng)模塊!! 求助…………
2012-11-01 15:31:36
方式, 本文對(duì)移動(dòng)機(jī)器人的運(yùn)動(dòng)視覺定位方法進(jìn)行了研究。該方法的實(shí)現(xiàn)分為兩部分: 首先采用移動(dòng)機(jī)器人視覺系統(tǒng)求出目標(biāo)質(zhì)心特征點(diǎn)的位置時(shí)間序列, 從而將對(duì)被跟蹤目標(biāo)的跟蹤轉(zhuǎn)化為對(duì)其質(zhì)心的跟蹤; 然后通過(guò)推廣
2019-06-01 08:00:00
先讀取視頻文件,并將它轉(zhuǎn)換成bmp文件,然后背景提取,作差分,形態(tài)學(xué)處理就可以得到運(yùn)動(dòng)目標(biāo)的區(qū)域了。代碼和視頻文件在壓縮包里,歡迎下載~
2016-07-18 18:09:24
求LabVIEW的視覺與運(yùn)動(dòng)模塊安裝包2018版的!萬(wàn)分感謝!!
2019-08-13 00:09:38
求labview 有關(guān)視覺與運(yùn)動(dòng)的視頻教程網(wǎng)址謝謝!
2013-08-02 21:04:39
誰(shuí)有離散點(diǎn)采樣方法的MATLAB實(shí)現(xiàn)的代碼 老師說(shuō)是用于圖像處理上的基于目標(biāo)區(qū)域和基于目標(biāo)邊界兩類方法的優(yōu)勢(shì),用陰采樣圖獲取目標(biāo)圖像中目標(biāo)的邊界信息,用陽(yáng)采樣圖獲取目標(biāo)圖像中目標(biāo)的區(qū)域信息,陰、陽(yáng)
2014-03-16 00:16:38
【計(jì)算機(jī)視覺】目標(biāo)檢測(cè)方法匯總
2019-06-14 14:49:26
信息。其中,圖像信息從單幀靜止圖像中得到,是經(jīng)典的圖像分類問題。運(yùn)動(dòng)信息則通過(guò)光流(optical flow)得到,其捕獲了目標(biāo)在相鄰幀之間的運(yùn)動(dòng)情況。CNN+RNN捕獲遠(yuǎn)距離依賴之前的方法只能捕獲
2019-06-08 08:00:00
介紹了一種多運(yùn)動(dòng)目標(biāo)檢測(cè)算法及序列圖像的仿真效果,同時(shí)對(duì)多運(yùn)動(dòng)目標(biāo)檢測(cè)后的二值圖像進(jìn)行了連通成分標(biāo)記袁最后根據(jù)標(biāo)記結(jié)果在原圖像中準(zhǔn)確地框定了各運(yùn)動(dòng)目標(biāo)。關(guān)
2009-03-07 10:11:09 6
6 針對(duì)非剛體運(yùn)動(dòng)目標(biāo)被遮擋的跟蹤問題,提出一種以目標(biāo)色斑子塊相關(guān)匹配聯(lián)合推舉的跟蹤方法。利用目標(biāo)色調(diào)特征的不變性對(duì)目標(biāo)色斑進(jìn)行自適應(yīng)分塊,通過(guò)子塊的運(yùn)動(dòng)狀態(tài)聯(lián)合
2009-03-25 08:47:3110 提出一種新的單攝像機(jī)多目標(biāo)跟蹤方法,采用全局背景減法得到當(dāng)前幀所有運(yùn)動(dòng)區(qū)域,利用kalman濾波器及局部背景減法得到已跟蹤目標(biāo)在當(dāng)前幀的預(yù)測(cè)區(qū)域,根據(jù)全局減法運(yùn)動(dòng)區(qū)域
2009-04-15 08:58:0325 針對(duì)序列圖像中的運(yùn)動(dòng)目標(biāo)檢測(cè)問題,在獨(dú)立分量分析的基本理論和算法的基礎(chǔ)上,提出采用基于正交對(duì)稱矩陣的快速定點(diǎn)算法對(duì)實(shí)際視頻圖像中的運(yùn)動(dòng)目標(biāo)進(jìn)行運(yùn)動(dòng)檢測(cè)的方法。
2009-05-26 20:38:0643 本文提出一種基于背景減除法和三幀差分法來(lái)進(jìn)行運(yùn)動(dòng)目標(biāo)檢測(cè)的算法。首先運(yùn)用Surendra 背景更新算法建立運(yùn)動(dòng)區(qū)域的背景模型,通過(guò)背景減除法確定運(yùn)動(dòng)目標(biāo)區(qū)域,后與三幀差
2009-06-06 16:04:0062 針對(duì)室內(nèi)安全監(jiān)控的場(chǎng)景特點(diǎn),提出一種穩(wěn)健的運(yùn)動(dòng)目標(biāo)檢測(cè)方法,對(duì)每個(gè)背景像素使用多個(gè)矢量表示,利用當(dāng)前幀和背景幀像素的色度分量差分進(jìn)行運(yùn)動(dòng)檢測(cè),并選擇性地更新背景模
2009-06-20 10:08:0821 基于機(jī)器人視覺平臺(tái),對(duì)成像目標(biāo)進(jìn)行模板提取及邊緣檢測(cè)。針對(duì)目標(biāo)在運(yùn)動(dòng)過(guò)程中的形變和部分遮擋問題,采用一種改進(jìn)的Hausdorff 距離進(jìn)行相似度量。提出了一種邊緣細(xì)化方法
2009-07-30 11:48:0823 本文介紹了一種基于FPGA 的圖像目標(biāo)發(fā)生器的設(shè)計(jì)方法,介紹了它的設(shè)計(jì)原理、硬件電路結(jié)構(gòu)、各功能的實(shí)現(xiàn)方法。該圖像發(fā)生器能產(chǎn)生灰度階圖像、靜態(tài)目標(biāo)圖像和運(yùn)動(dòng)目標(biāo)
2009-09-02 11:16:5527 目前,運(yùn)動(dòng)目標(biāo)的檢測(cè)是計(jì)算機(jī)視覺領(lǐng)域中最活躍的研究主題之一。本文介紹了光流法、幀間差分等運(yùn)動(dòng)目標(biāo)的檢測(cè)方法,提出了一種基于熵的
2009-09-08 09:31:0317 紅外運(yùn)動(dòng)弱小目標(biāo)的動(dòng)態(tài)規(guī)劃?rùn)z測(cè):針對(duì)動(dòng)態(tài)規(guī)劃方法在對(duì)紅外序列圖像運(yùn)動(dòng)弱小目標(biāo)進(jìn)行檢測(cè)時(shí)的能量擴(kuò)散問題,提出了一種新的檢測(cè)方法。該方法以目標(biāo)的運(yùn)動(dòng)特性為基礎(chǔ),構(gòu)造
2009-10-21 08:04:3616 該文研究了線性調(diào)頻(LFM)信號(hào)和單頻信號(hào)分?jǐn)?shù)階Fourier 變換(FRFT)模函數(shù)的一些性質(zhì),根據(jù)這些性質(zhì)提出了兩種基于FRFT 模之差的海雜波背景下勻加速運(yùn)動(dòng)目標(biāo)檢測(cè)的新方法。一種方法
2009-11-10 16:16:4023 遙感圖像中不同港口的內(nèi)港區(qū)域呈現(xiàn)出不同的形狀,該文提出一種基于內(nèi)港區(qū)域的港口目標(biāo)識(shí)別方法。首先利用直方圖和形態(tài)學(xué)算子分割海域;再利用多邊形近似法提取海岸線上的
2009-11-17 15:22:319 提出一種幀間雙差分法、自適應(yīng)光流、snake算法相結(jié)合的運(yùn)動(dòng)目標(biāo)檢測(cè)方法。通過(guò)幀間雙差分法提取運(yùn)動(dòng)區(qū)域,針對(duì)運(yùn)動(dòng)區(qū)域進(jìn)行光流計(jì)算,對(duì)光流計(jì)算結(jié)果進(jìn)行C-均值聚類,最后用聚類
2010-03-01 13:56:3422 由于實(shí)際場(chǎng)景的多樣性,目前常用的運(yùn)動(dòng)目標(biāo)檢測(cè)算法都還存在一定程度的缺陷,因此本文提出了一種將幀差法和背景減法相結(jié)合的方法,實(shí)現(xiàn)快速精確地檢測(cè)和提取運(yùn)動(dòng)目標(biāo)。實(shí)
2010-07-27 16:42:0713 視頻或圖像序列中的運(yùn)動(dòng)目標(biāo)檢測(cè)與跟蹤已成為計(jì)算機(jī)視覺領(lǐng)域研究的重要方向之一。本文實(shí)現(xiàn)了視頻序列中的運(yùn)動(dòng)目標(biāo)檢測(cè),使用了背景差法和幀間差分法檢測(cè)到運(yùn)動(dòng)目標(biāo)并進(jìn)
2010-10-09 16:01:2178 圖1 嵌入式運(yùn)動(dòng)目標(biāo)智能跟蹤系統(tǒng)功能圖摘
2006-03-11 12:23:30525 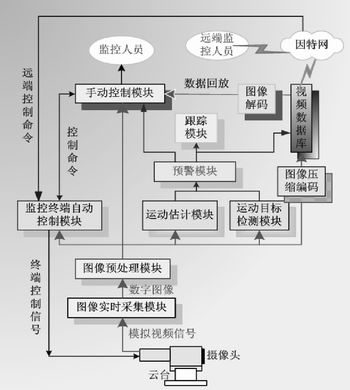
低信噪比運(yùn)動(dòng)紅外點(diǎn)目標(biāo)的檢測(cè)
為解決高空背景條件下紅外低信噪比運(yùn)動(dòng)點(diǎn)目標(biāo)的檢測(cè)問題,本文提出了一種基于膨脹累加的檢測(cè)方法.運(yùn)用形態(tài)膨
2009-10-21 18:38:47755 
提出了一種新的水下目標(biāo)運(yùn)動(dòng)分析(TMA)的數(shù)據(jù)融合方法,針對(duì)來(lái)自同一生源的不同數(shù)據(jù)測(cè)量組合后所得到的TMA估計(jì),在EKF組合濾波器中進(jìn)行數(shù)據(jù)融合,得到更精確的TMA估計(jì) 該方法能夠融
2011-03-31 15:25:0724 針對(duì)全自主足球機(jī)器人目標(biāo)識(shí)別受光強(qiáng)變化的影響, 實(shí)時(shí)性、準(zhǔn)確性和魯棒性存在的不足, 提出了一種基于動(dòng)態(tài)窗口HSI 色彩空間模型的閾值向量位與及區(qū)域合并算法, 并通過(guò)動(dòng)態(tài)窗口減小
2011-06-28 15:36:0634 研究了目前運(yùn)動(dòng)目標(biāo)檢測(cè)常用的兩種方法:三幀差分法及混合高斯模型背景差分法,并對(duì)兩種運(yùn)動(dòng)目標(biāo)檢測(cè)方法作了簡(jiǎn)述,且輔以典型的視頻運(yùn)動(dòng)目標(biāo)檢測(cè)實(shí)例,給出了兩種方法的實(shí)驗(yàn)結(jié)果
2011-12-23 14:31:4123 對(duì)傳統(tǒng)混合高斯背景模型作了改進(jìn),消除了緩慢運(yùn)動(dòng)目標(biāo)對(duì)背景模型的影響,其中提出了目標(biāo)間差分方法區(qū)分出前后幀變化區(qū),對(duì)不同區(qū)域采用不同的學(xué)習(xí)權(quán)重更新策略。通過(guò)實(shí)驗(yàn)證明
2012-04-20 11:23:5956 分析了多顆成像衛(wèi)星對(duì)區(qū)域目標(biāo)的協(xié)同觀測(cè)問題的特點(diǎn),提出了基于星載遙感器的幅寬、側(cè)擺能力以及衛(wèi)星軌道參數(shù)的動(dòng)態(tài)區(qū)域劃分方法,該方法能夠根據(jù)衛(wèi)星參數(shù)及偏移參數(shù)動(dòng)態(tài)劃分
2012-10-26 14:55:5037 提出了一種基于Surendra改進(jìn)的運(yùn)動(dòng)目標(biāo)檢測(cè)算法,通過(guò)對(duì)背景更新系數(shù)的改進(jìn),獲取穩(wěn)定準(zhǔn)確的背景,再將背景幀與含運(yùn)動(dòng)區(qū)域的圖像幀用差分運(yùn)算獲得運(yùn)動(dòng)目標(biāo)圖像。實(shí)驗(yàn)結(jié)果表明,
2013-08-07 19:02:3531 嵌入式視覺運(yùn)動(dòng)目標(biāo)跟蹤技術(shù)研究......
2016-01-06 13:43:1718 為了進(jìn)一步提高人臉檢測(cè)的準(zhǔn)確率,本文采用一種基于運(yùn)動(dòng)區(qū)域的檢測(cè)方法,該方法主要通過(guò)采用幀差法和自適應(yīng)的滑動(dòng)平均法相結(jié)合的算法,建立提取運(yùn)動(dòng)區(qū)域的模型,然后通過(guò)基于Boxfilter算法
2016-01-04 17:13:4920 基于RHT的局部有遮擋圓形目標(biāo)識(shí)別方法_顧肇瑞
2017-03-17 08:00:000 基于DSP運(yùn)動(dòng)目標(biāo)檢測(cè)系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)
2017-10-19 14:16:479 :給定視頻序列,以及序列第一幀的目標(biāo)位置與尺寸等初始狀態(tài),通過(guò)計(jì)算確定后續(xù)幀中目標(biāo)的狀態(tài)。時(shí)至今日,目標(biāo)跟蹤問題依然面臨許多挑戰(zhàn),包括背景干擾,光照變化,目標(biāo)尺度變化,目標(biāo)形變,目標(biāo)遮擋,目標(biāo)快速運(yùn)動(dòng)等。
2017-10-28 11:05:551 分析和理解視頻序列是當(dāng)前計(jì)算機(jī)視覺的重點(diǎn)研究鄰域。通常,運(yùn)動(dòng)目標(biāo)檢測(cè)在自動(dòng)視覺監(jiān)控系統(tǒng)中起著基石的作用,同時(shí)它也是運(yùn)動(dòng)捕獲、活動(dòng)分析等應(yīng)用的基礎(chǔ)。運(yùn)動(dòng)目標(biāo)檢測(cè)的基本操作就是將稱為前景的運(yùn)動(dòng)目標(biāo)與稱為
2017-10-30 16:42:392 運(yùn)動(dòng)目標(biāo)檢測(cè)作為計(jì)算機(jī)視覺領(lǐng)域的熱點(diǎn)之一,在智能視頻監(jiān)控、圖像檢索、運(yùn)動(dòng)分析等眾多領(lǐng)域都有著十分廣泛的應(yīng)用。目前常用的運(yùn)動(dòng)目標(biāo)檢測(cè)算法有幀間差分法、背景相減法、光流法等。這些方法主要是通過(guò)運(yùn)動(dòng)
2017-11-09 16:39:130 針對(duì)如何快速而精準(zhǔn)地檢測(cè)出運(yùn)動(dòng)目標(biāo)問題,借鑒昆蟲復(fù)眼在視覺信息處理上的獨(dú)特技巧和原理,提出一種基于仿生視覺系統(tǒng)的運(yùn)動(dòng)目標(biāo)快速檢測(cè)方法,為確保檢測(cè)效果,利用序列圖像中目標(biāo)和背景信息在空間和時(shí)間
2017-11-10 11:35:246 基于視覺的四旋翼直升機(jī)硬件系統(tǒng),主要包括飛行控制模塊、機(jī)載視覺模塊等:最后,針對(duì)上述硬件,設(shè)計(jì)了四旋翼直升機(jī)的軟件系統(tǒng),實(shí)現(xiàn)了基于視覺的目標(biāo)識(shí)別及跟蹤控制方法。通過(guò)多次飛行實(shí)驗(yàn)驗(yàn)證了該方法的可行性,表明該方法可以很好的解決
2017-11-14 10:25:379 針對(duì)被局部遮擋目標(biāo)的識(shí)別困難的問題,將目標(biāo)圖像的SIFT( Scale Invariant Feature Transform)特征矢量作為視覺單詞,應(yīng)用視覺詞匯算法,提出了基于SIFT特征視覺詞匯
2017-11-14 11:04:145 對(duì)于運(yùn)動(dòng)中的攝像機(jī)所拍攝視頻的分析,會(huì)發(fā)現(xiàn)目標(biāo)和背景都在運(yùn)動(dòng)的現(xiàn)象,因此難以較好地對(duì)運(yùn)動(dòng)目標(biāo)進(jìn)行檢測(cè)。針對(duì)此問題提出了一種適應(yīng)該類對(duì)象的運(yùn)動(dòng)目標(biāo)檢測(cè)技術(shù),該方法采用徑向運(yùn)動(dòng)補(bǔ)償和像素值重分配來(lái)實(shí)現(xiàn)
2017-11-15 14:53:158 針對(duì)海量、高速運(yùn)動(dòng)的空間目標(biāo)檢索查詢效率低的問題,提出一種基于軌道約束的空間目標(biāo)球面網(wǎng)格索引構(gòu)建方法。該方法利用地球慣性系下空間目標(biāo)軌道相對(duì)穩(wěn)定的特性,通過(guò)維護(hù)球面剖分網(wǎng)格內(nèi)途經(jīng)的空間目標(biāo)列表,實(shí)現(xiàn)
2017-11-30 10:52:280 視頻序列中運(yùn)動(dòng)目標(biāo)的檢測(cè)是目標(biāo)識(shí)別、標(biāo)記和追蹤的重要組成部分,背景減除法是運(yùn)動(dòng)目標(biāo)檢測(cè)中廣泛應(yīng)用的算法。針對(duì)光線變化、噪聲和局部運(yùn)動(dòng)等影響運(yùn)動(dòng)目標(biāo)檢測(cè)效果的問題,提出一種基于背景減除法的視頻序列運(yùn)動(dòng)
2017-12-01 15:22:052 圖像分割在許多圖像處理和機(jī)器視覺問題中是一個(gè)非常重要的過(guò)程,是將一幅圖分割成幾個(gè)顯著的區(qū)域,然而不能將其中最顯著的目標(biāo)直接分割出來(lái),需要進(jìn)一步處理。為此本文采用顯著性檢測(cè)的算法實(shí)現(xiàn)了對(duì)目標(biāo)的分割
2017-12-06 14:27:170 圖像拼接中出現(xiàn)的運(yùn)動(dòng)目標(biāo)可能使拼接出現(xiàn)不能正常拼接或者拼接出多重影像的現(xiàn)象。本文提出一種圖像拼接的運(yùn)動(dòng)目標(biāo)檢測(cè)方法,去除運(yùn)動(dòng)目標(biāo)對(duì)圖像拼接的影響。首先將采集的多場(chǎng)景圖像進(jìn)行拼接,如果不能正常拼接
2017-12-08 10:05:102 以及顏色分布模型,構(gòu)造運(yùn)動(dòng)目標(biāo)全局匹配函數(shù),結(jié)合目標(biāo)活力特征,實(shí)現(xiàn)多運(yùn)動(dòng)目標(biāo)連續(xù)匹配和跟蹤。實(shí)驗(yàn)結(jié)果表明,相對(duì)于傳統(tǒng)的運(yùn)動(dòng)目標(biāo)跟蹤方法,本文方法明顯減少了運(yùn)算時(shí)間,增強(qiáng)了環(huán)境適應(yīng)性,實(shí)現(xiàn)了復(fù)雜場(chǎng)景下運(yùn)動(dòng)目標(biāo)
2017-12-12 17:35:353 在復(fù)雜場(chǎng)景下的視頻運(yùn)動(dòng)目標(biāo)提取是視頻分析技術(shù)的首要工作。為了解決前景運(yùn)動(dòng)目標(biāo)提取的精確度不高的問題,提出一種基于視覺背景提取( ViBE)的改進(jìn)視頻運(yùn)動(dòng)目標(biāo)提取算法(ViBE+)。首先,在背景模型
2018-01-08 11:40:582 為了解決變結(jié)構(gòu)目標(biāo)跟蹤過(guò)程中目標(biāo)失跟率較高的問題,提出了一種基于視覺量子(vision quantum,簡(jiǎn)稱VQ)的目標(biāo)跟蹤方法.該方法首先在圖像內(nèi)自上而下地輻射視覺量子采集灰度信息,統(tǒng)計(jì)量子內(nèi)部
2018-01-08 14:59:400 檢測(cè)階段,首先提取兩幀帶檢測(cè)圖像的SIFT特征點(diǎn)并進(jìn)行特征匹配,然后計(jì)算兩幀圖像之間的幾何變換矩陣,從而實(shí)現(xiàn)圖像的幾何對(duì)齊。再將幾何對(duì)齊后的兩幅圖像進(jìn)行差分,并在差分圖像中尋找SAD最大值區(qū)域作為運(yùn)動(dòng)目標(biāo)區(qū)域。在目標(biāo)跟蹤階段,將已檢測(cè)到的目標(biāo)作為跟蹤樣本,與后檢測(cè)到
2018-01-09 16:17:461 針對(duì)當(dāng)前相關(guān)圖像模糊測(cè)量方法不能有效檢測(cè)紋理平坦清晰區(qū)域的問題,提出一種新的圖像局部模糊區(qū)域檢測(cè)方法,將其應(yīng)用于存在運(yùn)動(dòng)模糊的靜態(tài)圖像運(yùn)動(dòng)目標(biāo)檢測(cè)。對(duì)圖像進(jìn)行分塊操作,計(jì)算離散余弦變換后的圖像
2018-02-05 14:00:082 運(yùn)動(dòng)目標(biāo)檢測(cè)是圖像處理與計(jì)算機(jī)視覺的一個(gè)分支,在理論和實(shí)踐上都有重大意義,長(zhǎng)久以來(lái)一直被國(guó)內(nèi)外學(xué)者所關(guān)注。在實(shí)際中,視頻監(jiān)控利用攝像機(jī)對(duì)某一特定區(qū)域進(jìn)行監(jiān)視,是一個(gè)細(xì)致和連續(xù)的過(guò)程,它可以由人來(lái)完成
2019-10-14 17:46:4315 了運(yùn)動(dòng)圖像的光流場(chǎng),比較分析了這兩種方法的運(yùn)動(dòng)估計(jì)效果,這為目標(biāo)檢測(cè)、目標(biāo)跟蹤提供了基礎(chǔ)。只在VC6.0的基礎(chǔ)上編寫少量代碼就能使算法得以實(shí)現(xiàn),縮短了大量編程時(shí)間,提高了工作效率。
2019-10-15 11:56:4912 中的區(qū)域精確匹配、光照差、噪聲點(diǎn)及圖像融合問題。實(shí)驗(yàn)表明對(duì)含有運(yùn)動(dòng)物體的圖像采用該方法進(jìn)行拼接可以獲得較滿意的視覺效果。
2019-10-17 16:01:194 和混合高斯背景建模的運(yùn)動(dòng)檢測(cè)方法的優(yōu)缺點(diǎn),提出了一種3者相結(jié)合的運(yùn)動(dòng)目標(biāo)檢測(cè)算法。在討論數(shù)學(xué)模型的基礎(chǔ)上,通過(guò)OpenCV進(jìn)行了實(shí)現(xiàn),并對(duì)傳統(tǒng)算法進(jìn)行了簡(jiǎn)要介紹。實(shí)驗(yàn)結(jié)果表明該算法具有很好的檢測(cè)效果和魯棒性。
2019-10-23 16:21:354 對(duì)自己有存在價(jià)值的運(yùn)動(dòng)目標(biāo)或物體感興趣,研究基于視頻圖像的運(yùn)動(dòng)目標(biāo)的檢測(cè)與跟蹤,有很大的現(xiàn)實(shí)意義和實(shí)際價(jià)值。目前在實(shí)驗(yàn)室環(huán)境中已實(shí)現(xiàn)了對(duì)運(yùn)動(dòng)目標(biāo)的檢測(cè)和跟蹤。在運(yùn)動(dòng)目標(biāo)檢測(cè)方面,參考理論,用幀間差分法得到基
2019-10-24 11:25:008 為了從灰度圖像序列中精確提取出運(yùn)動(dòng)目標(biāo), 提出了一種從灰度圖像序列中提取運(yùn)動(dòng)目標(biāo)的算法———平滑模板對(duì)準(zhǔn)相乘法。該方法能很好跟蹤和識(shí)別圖像序列中的運(yùn)動(dòng)目標(biāo), 并準(zhǔn)確地將其提取出來(lái)。試驗(yàn)證明, 該算法提取出的運(yùn)動(dòng)目標(biāo)失真度小, 誤檢率低, 性能比常用的差值法明顯優(yōu)越。
2019-12-06 13:55:009 的狀態(tài)控制輸入,從而實(shí)現(xiàn)移動(dòng)機(jī)器人的橫向運(yùn)動(dòng)控制。該方法無(wú)需進(jìn)行攝像機(jī)的外部參數(shù)標(biāo)定,大大簡(jiǎn)化了計(jì)算過(guò)程,提高了視覺導(dǎo)航的實(shí)時(shí)性。
2020-07-03 17:45:0720 為了準(zhǔn)確、自動(dòng)地提取蝗蟲信息進(jìn)行蝗災(zāi)測(cè)報(bào),提出了一種基于機(jī)器視覺的草地蝗蟲識(shí)別方法,用于超低空蝗災(zāi)預(yù)警系統(tǒng)所自動(dòng)采集的視頻中草地蝗蟲頭數(shù)信息的提取。該方法先根據(jù)躍起草地蝗蟲的背景構(gòu)成,把原始圖像分為
2020-07-29 14:35:254 本文介紹了一種基于FPGA的圖像目標(biāo)發(fā)生器的設(shè)計(jì)方法,介紹了它的設(shè)計(jì)原理、硬件電路結(jié)構(gòu)、各功能的實(shí)現(xiàn)方法。該圖像發(fā)生器能產(chǎn)生灰度階圖像、靜態(tài)目標(biāo)圖像和運(yùn)動(dòng)目標(biāo)圖像,用來(lái)對(duì)圖像采集系統(tǒng)進(jìn)行評(píng)估。
2021-01-26 15:57:037 針對(duì)多伯努利濾波方法在多目標(biāo)跟蹤時(shí),難以檢測(cè)新生目標(biāo),且當(dāng)目標(biāo)岀現(xiàn)互相遮擋等千擾時(shí),跟蹤精度下降,甚至岀現(xiàn)目標(biāo)漏跟,以及當(dāng)漏跟目標(biāo)被重新跟蹤后,與之前運(yùn)動(dòng)軌跡難以關(guān)聯(lián)等問題,在多伯努利濾波框架
2021-04-07 14:27:345 視覺目標(biāo)跟蹤指在一個(gè)視頻序列中,給定第一幀目標(biāo)區(qū)域,在后續(xù)幀中自動(dòng)匹配到該目標(biāo)區(qū)堿的任務(wù)。通常來(lái)說(shuō),由于場(chǎng)景遮擋、光照變化、物體本身形變等復(fù)雜因素,目標(biāo)與場(chǎng)景的表觀會(huì)發(fā)生劇烈的變化,這使得跟蹤任務(wù)
2021-04-08 09:44:3214 相機(jī)拍攝目標(biāo),通過(guò)跟蹤算法對(duì)運(yùn)動(dòng)目標(biāo)進(jìn)行框選,使用非面積極大區(qū)域抑制法分割目標(biāo),計(jì)算目標(biāo)圖像的慣性橢圓從而實(shí)現(xiàn)目標(biāo)姿態(tài)測(cè)量。實(shí)驗(yàn)結(jié)果表明,在仿真情況、低復(fù)雜度及高復(fù)雜度的真實(shí)拍攝場(chǎng)景下,該方法的誤差分別低于
2021-05-26 17:09:399 基于無(wú)人機(jī)的遮擋目標(biāo)跟蹤算法
2021-06-28 17:06:0617 在實(shí)際的機(jī)器視覺項(xiàng)目應(yīng)用當(dāng)中圖像質(zhì)量效果是視覺處理方案能否準(zhǔn)確和穩(wěn)定運(yùn)行的關(guān)鍵因素。
圖像質(zhì)量的最佳效果是需要將特征目標(biāo)突出顯示,同時(shí)弱化與特征目標(biāo)無(wú)關(guān)的背景和干擾噪點(diǎn)。圖像閾值分割處理是最簡(jiǎn)單,也是最常用的圖像預(yù)處理方法,適用于處理目標(biāo)特征和背景像素灰度值差異明顯的圖像。
2022-03-04 11:37:28332 
在實(shí)際的機(jī)器視覺項(xiàng)目應(yīng)用當(dāng)中圖像質(zhì)量效果是視覺處理方案能否準(zhǔn)確和穩(wěn)定運(yùn)行的關(guān)鍵因素。如要對(duì)圖像區(qū)域內(nèi)的目標(biāo)邊緣進(jìn)行消除、連接、合并、過(guò)濾雜點(diǎn)或平滑等處理時(shí),需要進(jìn)行圖像膨脹腐蝕。
2022-04-01 11:00:48410 
正運(yùn)動(dòng)技術(shù)通過(guò)圖像處理技術(shù)對(duì)供料區(qū)域全局進(jìn)行物料在線有無(wú)檢測(cè),從而替代傳感器解決方案。
通過(guò)軸控配合視覺輔助檢測(cè),可以很好地規(guī)避了機(jī)構(gòu)不必要的走位和數(shù)據(jù)交互時(shí)間長(zhǎng)等問題,整體提高了企業(yè)的生產(chǎn)效率
2022-10-24 11:51:04556 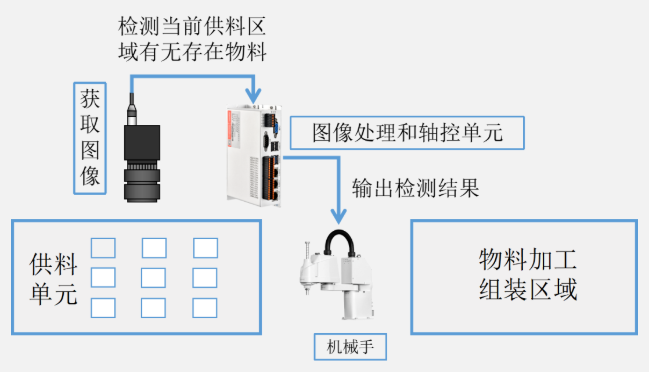
目標(biāo)視覺檢測(cè)的根本問題是估計(jì)特定類型目標(biāo)出現(xiàn)在圖像中的哪些位置.如圖 1所示, 目標(biāo)視覺檢測(cè)技術(shù)在流程上大致分為三個(gè)步驟:區(qū)域建議(Region proposal)、特征表示(Feature representation)和區(qū)域分類(Region classification).
2022-12-21 11:54:352138 運(yùn)動(dòng)目標(biāo)檢測(cè)的主要目的是從圖片序列中將變化區(qū)域或者運(yùn)動(dòng)物體從背景圖像中分離出來(lái),常用于視頻監(jiān)控、異常檢測(cè)、三維重建、實(shí)時(shí)定位與建圖等領(lǐng)域。
2023-03-29 09:29:50476 運(yùn)動(dòng)目標(biāo)檢測(cè)的主要目的是從圖片序列中將變化區(qū)域或者運(yùn)動(dòng)物體從背景圖像中分離出來(lái),常用于視頻監(jiān)控、異常檢測(cè)、三維重建、實(shí)時(shí)定位與建圖等領(lǐng)域。運(yùn)動(dòng)目標(biāo)檢測(cè)是許多領(lǐng)域應(yīng)用落地的基礎(chǔ),近年來(lái)被廣泛地關(guān)注和研究,對(duì)運(yùn)動(dòng)無(wú)人機(jī)檢測(cè)亦是如此。目前,運(yùn)動(dòng)目標(biāo)檢測(cè)的基本方法主要包括背景消減法、幀間差分法和光流法。
2023-04-10 16:42:30486 來(lái)源:機(jī)器視覺沙龍隨著機(jī)器視覺技術(shù)的快速發(fā)展,傳統(tǒng)很多需要人工來(lái)手動(dòng)操作的工作,漸漸地被機(jī)器所替代。傳統(tǒng)方法做目標(biāo)識(shí)別大多都是靠人工實(shí)現(xiàn),從形狀、顏色、長(zhǎng)度、寬度、長(zhǎng)寬比來(lái)確定被識(shí)別的目標(biāo)是否符合
2022-12-15 10:44:10619 
隨著機(jī)器視覺技術(shù)的快速發(fā)展,傳統(tǒng)很多需要人工來(lái)手動(dòng)操作的工作,漸漸地被機(jī)器所替代。傳統(tǒng)方法做目標(biāo)識(shí)別大多都是靠人工實(shí)現(xiàn),從形狀、顏色、長(zhǎng)度、寬度、長(zhǎng)寬比來(lái)確定被識(shí)別的目標(biāo)是否符合標(biāo)準(zhǔn),最終定義出
2024-03-14 08:26:20225
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論