特征點(diǎn)法的VSLAM系統(tǒng)中,特征點(diǎn)并不是越多越好;相反, 少量 并且 質(zhì)量高 的點(diǎn)會(huì)讓這個(gè)SLAM系統(tǒng)位姿精度更高,且消耗更少的存儲(chǔ)資源和計(jì)算資源。
2022-08-23 11:09:48 1200
1200 本文的優(yōu)勢(shì)不僅包括討論A-SLAM的內(nèi)部組成部分,還包括其應(yīng)用領(lǐng)域、局限性和未來前景,以及對(duì)過去十年A-SLAM進(jìn)行全面的統(tǒng)計(jì)調(diào)查。
2023-03-17 10:44:57504 上周的組會(huì)上,我給研一的萌新們講解什么是SLAM,為了能讓他們?cè)跊]有任何基礎(chǔ)的情況下大致聽懂,PPT只能多圖少字沒公式,這里我就把上周的組會(huì)匯報(bào)總結(jié)一下。 這次匯報(bào)的題目我定為“視覺SLAM:一直在
2023-08-21 10:02:071574 
神經(jīng)隱式表示已經(jīng)被探索用于增強(qiáng)視覺SLAM掩碼算法,特別是在提供高保真的密集地圖方面。
2024-01-17 10:39:50442 
SLAM技術(shù)作為機(jī)器人自主移動(dòng)的關(guān)鍵技術(shù),讓很多人都誤解為:SLAM=機(jī)器人自主定位導(dǎo)航。 其實(shí),SLAM≠機(jī)器人自主定位導(dǎo)航 ,不解決行動(dòng)問題。 SLAM如其名一樣,主要解決的是機(jī)器人的地圖構(gòu)建
2018-08-24 16:56:24
常有必要的 。 回環(huán)檢測(cè)失敗 如何提升機(jī)器人回環(huán)檢測(cè)能力? 那么,怎么才能讓機(jī)器人的回環(huán)檢測(cè)能力得到一個(gè)質(zhì)的提升呢?首先要有一個(gè)算法上的優(yōu)化。 1. 基于圖優(yōu)化的SLAM算法 基于圖優(yōu)化
2019-03-06 15:38:04
近年來,由于掃地機(jī)的出現(xiàn)使得SLAM技術(shù)名聲大噪,如今,已在機(jī)器人、無人機(jī)、AVG等領(lǐng)域相繼出現(xiàn)它的身影,今天就來跟大家聊一聊國(guó)內(nèi)SLAM的發(fā)展現(xiàn)狀。 SLAM的多領(lǐng)域應(yīng)用SLAM應(yīng)用領(lǐng)域廣泛,按其
2018-12-06 10:25:32
無人機(jī)在飛行的過程中需要知道哪里有障礙物,該怎么規(guī)避,怎么重新規(guī)劃路線。顯然,這是SLAM技術(shù)的應(yīng)用。但無人機(jī)飛行的范圍較大,所以對(duì)精度的要求不高,市面上其他的一些光流、超聲波傳感器可以
2020-12-01 14:26:37
研究生期間進(jìn)行了基于2D激光雷達(dá)的SLAM的研究,當(dāng)時(shí)主要做了二維激光雷達(dá)的數(shù)據(jù)處理。小弟不才,沒有入得了SLAM的坑,卻一直謎之向往,如今得以機(jī)會(huì),決定正式邁出第一步,徹底進(jìn)入SLAM的坑!心中
2021-08-30 06:13:31
導(dǎo)讀:UPS是系統(tǒng)集成項(xiàng)目中常用到的設(shè)備,也是機(jī)房必備的設(shè)備。本文簡(jiǎn)單介紹了UPS的種類、功能、原理,品質(zhì)選擇與配置選擇方式,基礎(chǔ)維護(hù)等相關(guān)的內(nèi)容。一文搞懂UPS本文主要內(nèi)容:UPS種類、功能
2021-09-15 07:49:53
參考一文搞懂開關(guān)電源波紋的產(chǎn)生、測(cè)量及抑制開關(guān)電源紋波的產(chǎn)生上圖是開關(guān)電源中最簡(jiǎn)單的拓?fù)浣Y(jié)構(gòu)-buck降壓型電源。隨著SWITCH的開關(guān),電感L中的電流也是在輸出電流的有效值上下波動(dòng)的。所以在輸出端
2021-12-30 08:31:11
指針是一個(gè)特殊的變量,它里面存儲(chǔ)的數(shù)值被解釋為內(nèi)存里面的一個(gè)地址想要徹底搞懂它,就必須從計(jì)算機(jī)的底層進(jìn)行解釋,這是你的內(nèi)存條,內(nèi)存在物理上是由一組DRAM芯片組成,程序在運(yùn)行時(shí)。數(shù)據(jù)便被保存
2022-07-22 14:48:04
摘要故障診斷是保證水輪發(fā)電機(jī)組安全運(yùn)行的重要環(huán)節(jié)。軸心軌跡辨識(shí)是HGU故障診斷的一種有效方法。提出了一種基于綜合幾何特征和概率神經(jīng)網(wǎng)絡(luò)(CGC-PNN)的HGU軸軌識(shí)別方法。該方法從結(jié)構(gòu)、區(qū)域和邊界
2021-09-15 08:18:35
嵌入式Linux開發(fā)系統(tǒng)開發(fā)之《一節(jié)課搞懂文件IO與標(biāo)準(zhǔn)IO》
2021-12-16 08:18:24
神經(jīng)元 第3章 EBP網(wǎng)絡(luò)(反向傳播算法) 3.1 含隱層的前饋網(wǎng)絡(luò)的學(xué)習(xí)規(guī)則 3.2 Sigmoid激發(fā)函數(shù)下的BP算法 3.3 BP網(wǎng)絡(luò)的訓(xùn)練與測(cè)試 3.4 BP算法的改進(jìn) 3.5 多層
2012-03-20 11:32:43
將神經(jīng)網(wǎng)絡(luò)移植到STM32最近在做的一個(gè)項(xiàng)目需要用到網(wǎng)絡(luò)進(jìn)行擬合,并且將擬合得到的結(jié)果用作控制,就在想能不能直接在單片機(jī)上做神經(jīng)網(wǎng)絡(luò)計(jì)算,這樣就可以實(shí)時(shí)計(jì)算,不依賴于上位機(jī)。所以要解決的主要是兩個(gè)
2022-01-11 06:20:53
《Fundamentals of Computer Graphics》翻譯(三):隱式2D直線
2019-09-03 12:19:29
您好,我現(xiàn)在正在使用PIC16F18313,在代碼中,我聲明了一個(gè)變量,它位于我放入的示例代碼中,問題是,我收到一個(gè)警告:隱式簽名到無符號(hào)轉(zhuǎn)換,我不知道是什么原因或者如何修復(fù)它。關(guān)于我的問題:希望你能得到一個(gè)很好的回答。謝謝。
2020-04-07 14:06:10
您好,我很少關(guān)注隱式簽名到無符號(hào)轉(zhuǎn)換警告。為什么所有的變量都被聲明為無符號(hào),我仍然得到這個(gè)警告?上面例子中的值是否被視為無符號(hào)或有符號(hào)字符?在這種情況下,變量“C”的值是150還是其他?同樣,在下一
2018-11-06 14:43:52
預(yù)設(shè)一些特征來定位,比較典型的例子是Amazon的Kiva。 Amazon的Kiva 【 ■SLAM(同步定位與地圖構(gòu)建)算法在AGV小車中的使用 目前,AGV廠家運(yùn)用的最先進(jìn)的導(dǎo)航方式
2018-11-09 15:59:01
一文看懂BP神經(jīng)網(wǎng)絡(luò)的基礎(chǔ)數(shù)學(xué)知識(shí)
2020-06-16 07:14:35
FPGA加速的關(guān)鍵因素是什么?EdgeBoard中神經(jīng)網(wǎng)絡(luò)算子在FPGA中的實(shí)現(xiàn)方法是什么?
2021-09-28 06:37:44
Intelligent Vehicles Applications1. 介紹2. HOOFR-SLAM2.1 系統(tǒng)框架2.2 HOOFR特征提取2.3 映射線程2.3.1 特征匹配1. 介紹提出一種HOOFR-...
2021-12-21 06:35:49
(以下內(nèi)容來自開發(fā)者分享,不代表 OpenHarmony 項(xiàng)目群工作委員會(huì)觀點(diǎn))徐浩隱式查詢是 OpenAtom OpenHarmony(以下簡(jiǎn)稱“OpenHarmony”)的一個(gè)基礎(chǔ)能力,被
2022-03-22 18:35:18
STM32中文顯示有什么抗鋸齒方法
2023-10-15 11:49:31
您好,我使用了兩個(gè)選項(xiàng)來改變浮點(diǎn)到余弦角的整數(shù)。但是我得到了如下警告:警告[356 ]代碼\ADC.C;282.27將浮點(diǎn)到整數(shù)的隱式轉(zhuǎn)換。所以不能得到準(zhǔn)確的結(jié)果。我的代碼
2019-09-06 12:07:02
習(xí)神經(jīng)神經(jīng)網(wǎng)絡(luò),對(duì)于神經(jīng)網(wǎng)絡(luò)的實(shí)現(xiàn)是如何一直沒有具體實(shí)現(xiàn)一下:現(xiàn)看到一個(gè)簡(jiǎn)單的神經(jīng)網(wǎng)絡(luò)模型用于訓(xùn)練的輸入數(shù)據(jù):對(duì)應(yīng)的輸出數(shù)據(jù):我們這里設(shè)置:1:節(jié)點(diǎn)個(gè)數(shù)設(shè)置:輸入層、隱層、輸出層的節(jié)點(diǎn)
2021-08-18 07:25:21
mysql 隱式轉(zhuǎn)換問題
2019-08-13 06:07:31
`BP神經(jīng)網(wǎng)絡(luò)首先給出只包含一個(gè)隱層的BP神經(jīng)網(wǎng)絡(luò)模型(兩層神經(jīng)網(wǎng)絡(luò)): BP神經(jīng)網(wǎng)絡(luò)其實(shí)由兩部分組成:前饋神經(jīng)網(wǎng)絡(luò):神經(jīng)網(wǎng)絡(luò)是前饋的,其權(quán)重都不回送到輸入單元,或前一層輸出單元(數(shù)據(jù)信息是單向
2019-07-21 04:00:00
:warning:(361)函數(shù)聲明為隱式int.,這似乎對(duì)代碼的實(shí)際編譯或運(yùn)行沒有任何影響,但是它有點(diǎn)煩人。有什么想法,為什么這個(gè)特定的功能是扔這個(gè)警告?
2019-10-24 13:23:19
人工神經(jīng)網(wǎng)絡(luò)(Artificial Neural Network,ANN)是一種類似生物神經(jīng)網(wǎng)絡(luò)的信息處理結(jié)構(gòu),它的提出是為了解決一些非線性,非平穩(wěn),復(fù)雜的實(shí)際問題。那有哪些辦法能實(shí)現(xiàn)人工神經(jīng)網(wǎng)絡(luò)呢?
2019-08-01 08:06:21
優(yōu)化神經(jīng)網(wǎng)絡(luò)訓(xùn)練方法有哪些?
2022-09-06 09:52:36
隱裂、熱斑、PID效應(yīng),是影響晶硅性能的三個(gè)重要因素。今天兔子君帶大家了解一下電池片隱裂的原因、如何識(shí)別及預(yù)防方法。1. 什么是“隱裂”隱裂是晶體硅組件的一種較為常見的缺陷,通俗的講,就是一些肉眼
2018-10-15 19:58:03
inference在設(shè)備端上做。嵌入式設(shè)備的特點(diǎn)是算力不強(qiáng)、memory小。可以通過對(duì)神經(jīng)網(wǎng)絡(luò)做量化來降load和省memory,但有時(shí)可能memory還吃緊,就需要對(duì)神經(jīng)網(wǎng)絡(luò)在memory使用上做進(jìn)一步優(yōu)化
2021-12-23 06:16:40
的突破。AlexNet 在百萬(wàn) 量級(jí)的 ImageNet數(shù)據(jù)集上對(duì)于圖像分類的精度大幅 度超過傳統(tǒng)方法,一舉摘下了視覺領(lǐng)域競(jìng)賽 ILSVRC2012的桂冠。自 AlexNet之后,研究者從卷積神經(jīng)網(wǎng) 絡(luò)
2022-08-02 10:39:39
和神經(jīng)網(wǎng)絡(luò)包。AIoT那么火,為何大家卻止步于科普文?因?yàn)楝F(xiàn)成的機(jī)器學(xué)習(xí)框架都太復(fù)雜太難用。NNoM從一開始就被設(shè)計(jì)成提供給嵌入式大佬們的一個(gè)簡(jiǎn)單易用的神經(jīng)網(wǎng)絡(luò)框架。你不需要會(huì)TensorFlow
2019-05-01 19:03:01
題目:基于SLAM的移動(dòng)機(jī)器人設(shè)計(jì)嵌入式PPT應(yīng)具有的幾個(gè)部分1、有哪些硬件 1)小車 2)STM32F429開發(fā)板 3)樹莓派3b+開發(fā)板 4)4g通信模塊 5)GPS模塊 6
2021-11-08 06:17:14
摘 要:本文給出了采用ADXL335加速度傳感器來采集五個(gè)手指和手背的加速度三軸信息,并通過ZigBee無線網(wǎng)絡(luò)傳輸來提取手勢(shì)特征量,同時(shí)利用BP神經(jīng)網(wǎng)絡(luò)算法進(jìn)行誤差分析來實(shí)現(xiàn)手勢(shì)識(shí)別的設(shè)計(jì)方法
2018-11-13 16:04:45
FPGA實(shí)現(xiàn)神經(jīng)網(wǎng)絡(luò)關(guān)鍵問題分析基于FPGA的ANN實(shí)現(xiàn)方法基于FPGA的神經(jīng)網(wǎng)絡(luò)的性能評(píng)估及局限性
2021-04-30 06:58:13
基于深度神經(jīng)網(wǎng)絡(luò)的激光雷達(dá)物體識(shí)別系統(tǒng)及其嵌入式平臺(tái)部署
2021-01-04 06:26:23
基于視覺的slam自動(dòng)駕駛,這是我們測(cè)試的視頻《基于slam算法的智能機(jī)器人》調(diào)研分析報(bào)告項(xiàng)目背景分析機(jī)器人曾經(jīng)是科幻電影中的形象,可目前已經(jīng)漸漸走入我們的生活。機(jī)器人技術(shù)以包含機(jī)械、電子、自動(dòng)控制
2021-08-09 09:37:34
嵌入式系統(tǒng)開發(fā)與應(yīng)用——基于視覺的機(jī)器人SLAM入門實(shí)踐1一、OpenCV的安裝與配置1. 下載OpenCV3.4.1并解壓到ubuntu相應(yīng)目錄上2. 下載安裝依賴庫(kù)和編譯工具cmake(1)更新
2021-12-16 08:16:12
的貝葉斯分類器得到了廣泛的認(rèn)可。 徑向基函數(shù)(RBF)網(wǎng)絡(luò)是一種性能良好的前饋型三層神經(jīng)網(wǎng)絡(luò),具有全局逼近性質(zhì)和最佳逼近性能,訓(xùn)練方法快速易行,RBF 函數(shù)還具有局部響應(yīng)的生物合理性。RBF神經(jīng)
2009-10-23 10:03:57
人工智能下面有哪些機(jī)器學(xué)習(xí)分支?如何用卷積神經(jīng)網(wǎng)絡(luò)(CNN)方法去解決機(jī)器學(xué)習(xí)監(jiān)督學(xué)習(xí)下面的分類問題?
2021-06-16 08:09:03
作者:李云紅0 引言自20世紀(jì)70年代以來,模擬電路故障診斷領(lǐng)域已經(jīng)取得了一定的研究成果,近年來,基于神經(jīng)網(wǎng)絡(luò)技術(shù)的現(xiàn)代模擬電路軟故障診斷方法已成為新的研究熱點(diǎn),神經(jīng)網(wǎng)絡(luò)的泛化能力和非線性映射能力
2019-07-05 08:06:02
人工神經(jīng)網(wǎng)絡(luò)在AI中具有舉足輕重的地位,除了找到最好的神經(jīng)網(wǎng)絡(luò)模型和訓(xùn)練數(shù)據(jù)集之外,人工神經(jīng)網(wǎng)絡(luò)的另一個(gè)挑戰(zhàn)是如何在嵌入式設(shè)備上實(shí)現(xiàn)它,同時(shí)優(yōu)化性能和功率效率。 使用云計(jì)算并不總是一個(gè)選項(xiàng),尤其是當(dāng)
2021-11-09 08:06:27
大家好,我想學(xué)習(xí)SLAM技術(shù)有資深的老師愿意教我嗎?qq:496397940
2018-11-09 13:42:27
下面來探討一下深度學(xué)習(xí)在嵌入式設(shè)備上的應(yīng)用,具體如下:1、深度學(xué)習(xí)的概念源于人工神經(jīng)網(wǎng)絡(luò)的研究,包含多個(gè)隱層的多層感知器(MLP) 是一種原始的深度學(xué)習(xí)結(jié)構(gòu)。深度學(xué)習(xí)通過組合低層特征形成更加抽象
2021-10-27 08:02:31
最近對(duì)于這些經(jīng)常出現(xiàn)在論文里面的永磁同步電機(jī)型別經(jīng)常搞混,特別是面裝式內(nèi)置式和凸極性隱極性的對(duì)應(yīng)關(guān)系,經(jīng)常是混淆的,在這里專門區(qū)分一下。1、按永磁體在鐵芯上的安裝位置不同,可以將永磁同步電機(jī)分為,表
2021-08-27 08:09:59
小女子做基于labview的蒸發(fā)過程中液位的控制,想使用神經(jīng)網(wǎng)絡(luò)pid控制,請(qǐng)問這個(gè)控制方法可以嗎?有誰(shuí)會(huì)神經(jīng)網(wǎng)絡(luò)pid控制么。。。叩謝
2016-09-23 13:43:16
什么是回環(huán)檢測(cè)?在講解回環(huán)檢測(cè)前,我們先來了解下回環(huán)的概念。在視覺SLAM問題中,位姿的估計(jì)往往是一個(gè)遞推的過程,即由上一幀位姿解算當(dāng)前幀位姿,因此其中的誤差便這樣一幀一幀的傳遞下去,也就是我們
2018-10-23 17:47:22
SLAM(同步定位與地圖構(gòu)建),是指運(yùn)動(dòng)物體根據(jù)傳感器的信息,一邊計(jì)算自身位置,一邊構(gòu)建環(huán)境地圖的過程,解決機(jī)器人等在未知環(huán)境下運(yùn)動(dòng)時(shí)的定位與地圖構(gòu)建問題。目前,SLAM 的主要應(yīng)用于機(jī)器人、無人機(jī)、無人駕駛、AR、VR 等領(lǐng)域。其用途包括傳感器自身的定位,以及后續(xù)的路徑規(guī)劃、運(yùn)動(dòng)性能、場(chǎng)景理解。
2020-05-20 08:19:40
機(jī)器人定位導(dǎo)航中,目前主要涉及到激光SLAM與視覺SLAM,激光SLAM在理論、技術(shù)和產(chǎn)品落地上都較為成熟,因而成為現(xiàn)下最為主流的定位導(dǎo)航方式,在家用掃地機(jī)器人及商用送餐機(jī)器人等服務(wù)機(jī)器人中普遍采用了...
2021-07-05 06:41:57
什么是激光SLAM?視覺VSLAM又是什么?激光SLAM和視覺VSLAM有哪些不同之處?
2021-11-10 07:16:02
什么是激光SLAM?激光SLAM技術(shù)在機(jī)器人運(yùn)動(dòng)控制系統(tǒng)中的應(yīng)用是什么?
2021-07-30 06:37:25
常見的問題,但也不必過度擔(dān)心。 3. 識(shí)別“隱裂”的方法 EL(Electroluminescence,電致發(fā)光)是一種太陽(yáng)能電池或組件的內(nèi)部缺陷檢測(cè)設(shè)備,是簡(jiǎn)單有效的檢測(cè)隱裂的方法。利用晶體硅
2020-12-09 15:33:38
硬件難學(xué)?首先搞懂單片機(jī)、ARM、MUC、DSP、FPGA、嵌入式錯(cuò)綜復(fù)雜的關(guān)系!
2017-10-14 20:05:14
【總結(jié)】視覺SLAM筆記整理
2020-07-17 14:05:20
圖引擎,讓機(jī)器人在復(fù)雜、大面積的場(chǎng)景下也能輕松應(yīng)對(duì),穩(wěn)定發(fā)揮,完成定位導(dǎo)航任務(wù)。 傳統(tǒng)SLAM 及SLAM 3.0的建圖對(duì)比: -建圖精度高,圖優(yōu)化式建圖 - 主動(dòng)閉環(huán)修正 - 建圖穩(wěn)定、不
2019-01-21 10:57:46
)Makefile的工作原理Makefile自動(dòng)檢測(cè)更新Makefile隱式規(guī)則Makefile隱式規(guī)則 - 簡(jiǎn)化2Makefile隱式聲明 - 簡(jiǎn)化3Makefile的變量替換Makefile優(yōu)化
2021-12-15 08:58:21
專門針對(duì)Arm嵌入式設(shè)備優(yōu)化的神經(jīng)網(wǎng)絡(luò)推理引擎Tengine + HCL,不同人群的量身定制
2021-01-15 08:00:42
納米技術(shù)制作,芯片面積只有4.36平方毫米。“前兩個(gè)因素使 Hiddenite 芯片與現(xiàn)有的 DNN 推理加速器區(qū)別開來,”motoura 教授說。“此外,我們還引入了一種新的隱式神經(jīng)網(wǎng)絡(luò)訓(xùn)練方法,稱為
2022-03-17 19:15:13
實(shí)現(xiàn)單目視覺同時(shí)定位與建圖(SLAM)仿真系統(tǒng),描述其設(shè)計(jì)過程。該系統(tǒng)工作性能良好,其SLAM算法可擴(kuò)展性強(qiáng),可以精確逼近真實(shí)單目視覺SLAM過程。以方便SLAM算法的研究為目標(biāo),提
2009-04-15 08:50:37 82
82 基于模糊聚類的神經(jīng)元識(shí)別方法_張晶
2017-01-08 11:13:290 基于模糊聚類方法的神經(jīng)元形態(tài)分類識(shí)別_劉輝舟
2017-03-16 10:31:520 基于神經(jīng)網(wǎng)絡(luò)的聚類方法研究_胡偉
2017-03-16 09:37:530 、幀間配準(zhǔn)、位姿變換估計(jì)以及閉環(huán)檢測(cè)對(duì)SLAM系統(tǒng)的影響,建立了關(guān)鍵幀閉環(huán)匹配算法和SLAM實(shí)時(shí)性與魯棒性之間的關(guān)系,提出了一種基于ORB關(guān)鍵幀匹配算法的SLAM方法。運(yùn)用改進(jìn)ORB算法加快了圖像特征點(diǎn)提取與描述符建立速度;結(jié)合相機(jī)模型與深度信息,
2018-03-26 10:57:326 高仙的SLAM2.0技術(shù)體系核心,是基于多傳感器融合+深度學(xué)習(xí)的架構(gòu),即語(yǔ)義SLAM。高仙SLAM2.0技術(shù)方案以語(yǔ)義分析、機(jī)器學(xué)習(xí)為基礎(chǔ),結(jié)合云端實(shí)時(shí)信息處理以及專為多傳感器融合而開發(fā)的專業(yè)算法體系,真正實(shí)現(xiàn)了SLAM在建圖和導(dǎo)航兩個(gè)環(huán)節(jié)的完整應(yīng)用。
2018-05-15 16:48:308535 本文是調(diào)研視覺SLAM中的實(shí)現(xiàn)方法的總結(jié),包括三方面內(nèi)容:姿態(tài)計(jì)算、閉環(huán)檢測(cè)、BA優(yōu)化。
2019-05-18 11:49:014037 運(yùn)動(dòng)恢復(fù)結(jié)構(gòu)(SfM)和 SLAM 所解決的問題非常相似,但 SfM 傳統(tǒng)上是以離線形式進(jìn)行的,而 SLAM 則已經(jīng)慢慢走向了低功耗/實(shí)時(shí)/單 RGB 相機(jī)的運(yùn)行模式。
2019-11-22 14:34:0716984 
如今科技發(fā)展日新月異,諸如機(jī)器人、AR/VR等前沿科技產(chǎn)品已走入了大眾生活當(dāng)中。但是想在這些領(lǐng)域讓用戶有更好的體驗(yàn),就需要很多底層技術(shù)的支持,SLAM就是其中之一。如果說機(jī)器人離開了SLAM
2020-04-17 09:21:4153848 本文研究了基于多傳感器組合導(dǎo)航方法的SLAM,由于移動(dòng)機(jī)器人無法通過單個(gè)傳感器得到可靠的信息,采用多傳感器組合導(dǎo)航的方法可以很好的解決這個(gè)問題。本文用單個(gè)CCD攝像頭和里程計(jì)組合進(jìn)行SLAM研究
2020-08-07 17:14:0112 在業(yè)內(nèi),視覺SLAM與激光SLAM誰(shuí)更勝一籌,誰(shuí)將成為未來主流趨勢(shì)這一問題,成為大家關(guān)注的熱點(diǎn),不同的人也有不同的看法及見解,以下將從成本、應(yīng)用場(chǎng)景、地圖精度、易用性幾個(gè)方面來進(jìn)行詳細(xì)闡述。
2020-08-28 14:53:3016068 
同時(shí)定位與地圖構(gòu)建(SLAM)作為機(jī)器人領(lǐng)域的硏究熱點(diǎn),近年來取得了快速發(fā)展,但多數(shù)SLAM方法未考慮應(yīng)用場(chǎng)景中的動(dòng)態(tài)或可移動(dòng)目標(biāo)。針對(duì)該問題,提出一種適用于動(dòng)態(tài)場(chǎng)景的SLAM方法。將基于深度學(xué)習(xí)
2021-03-18 10:39:3916 針對(duì)基于RBPF的激光SLAM算法在重采樣過程中出現(xiàn)的樣本貧化和激光測(cè)量模型不準(zhǔn)確的問題,提出種優(yōu)化的激光SLAM算法。為緩解重采樣過程中的樣本貧化問題,采用最小采樣方差重采樣方法改進(jìn)原重采樣方法
2021-04-01 10:48:316 課題組已將該研究成果應(yīng)用于智能駕駛即時(shí)定位與建圖(SLAM)任務(wù)中,提出了基于三維激光數(shù)據(jù)的層級(jí)式SLAM方法,實(shí)現(xiàn)了無GNSS環(huán)境下智能無人系統(tǒng)的高精度自主定位定姿,在智能駕駛國(guó)際著名公開數(shù)據(jù)集KITTI上排名全球第7(純激光SLAM算法中排名全球第4)。
2021-04-20 09:19:301806 
高效共享與利用的難題,面向快速、準(zhǔn)確、大范圍多機(jī)協(xié)同SLAM需求,本文提出了一種基于集中式架構(gòu)的多無人機(jī)局部地圖數(shù)據(jù)高效共享和融合的SLAM方法Data Sharing Oriented Multi-uav Collaborative SLAM( DSM-SLAM)。該方法創(chuàng)新性地提出了:(1)基于
2021-06-02 11:29:378 我看來,vslam得發(fā)展也就是從MonoSLAM->PTAM->圖優(yōu)化SLAM->ORB-SLAM為代表的現(xiàn)代slam,其中可能還有許多內(nèi)容,不過這些開源SLAM一定程度上體現(xiàn)了SLAM發(fā)展過程了....
2021-06-18 10:40:521357 
./oschina_soft/Snake-SLAM.zip
2022-06-16 11:27:432 近年來,使用機(jī)器學(xué)習(xí)技術(shù)進(jìn)行特征提取的基于調(diào)制解調(diào)器特征的SLAM越來越受到關(guān)注,并有望在幾乎所有機(jī)器人工作環(huán)境中超越傳統(tǒng)方法。
2022-10-17 16:39:46603 (Visual SLAM,VSLAM)是將圖像作為主要環(huán)境感知信息源的SLAM系統(tǒng),VSLAM以計(jì)算相機(jī)位姿為主要目標(biāo),通過多視幾何方法構(gòu)建3D地圖[4]
2022-12-02 15:00:281149 手持SLAM設(shè)備最大的特點(diǎn)肯定要放到手持這個(gè)動(dòng)作上面,由于SLAM算法的優(yōu)越性,手持可以做到走到哪里測(cè)到哪里。
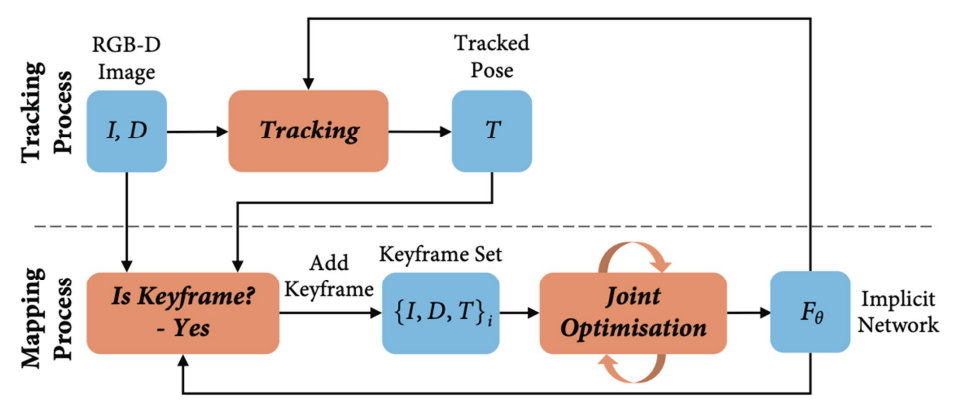
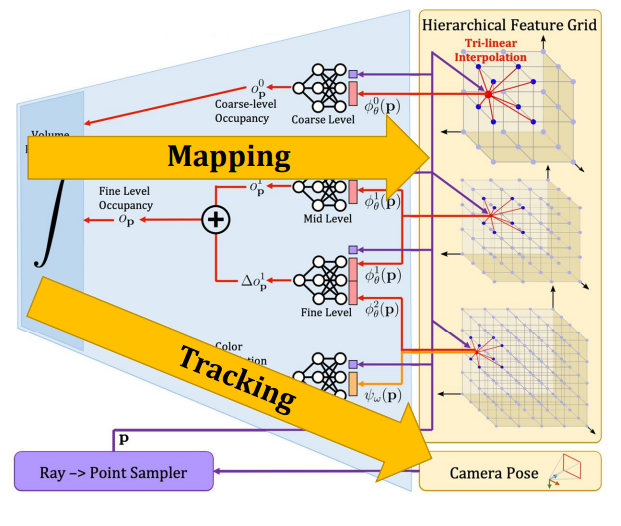
2022-12-27 10:43:413287 我們提出了NICE-SLAM,一個(gè)密集的RGB-D SLAM系統(tǒng),它具有實(shí)時(shí)性、可擴(kuò)展性、預(yù)測(cè)性和對(duì)各種挑戰(zhàn)性場(chǎng)景的魯棒性。
2023-01-30 11:19:29451 我們提出了一個(gè)新的幾何和光度3D映射管道,用于從單眼圖像中準(zhǔn)確和實(shí)時(shí)地重建場(chǎng)景。為了實(shí)現(xiàn)這一目標(biāo),我們利用了最近在密集單眼SLAM和實(shí)時(shí)分層容積神經(jīng)輻射場(chǎng)方面的進(jìn)展。
2023-01-30 11:24:13491 我們提出了一種利用深度密集單目 SLAM 和快速不確定性傳播從圖像重建 3D 場(chǎng)景的新方法。所提出的方法能夠密集、準(zhǔn)確、實(shí)時(shí)地 3D 重建場(chǎng)景,同時(shí)對(duì)來自密集單目 SLAM 的極其嘈雜的深度估計(jì)具有魯棒性。
2023-01-30 11:34:22449 vMAP 是一種基于神經(jīng)場(chǎng)的對(duì)象級(jí)密集 SLAM 系統(tǒng),可根據(jù) RGB-D 輸入流實(shí)時(shí)自動(dòng)構(gòu)建對(duì)象級(jí)場(chǎng)景模型。
2023-06-15 09:29:13498 
近日,全國(guó)SLAM技術(shù)論壇于廈門大學(xué)舉辦。本次論壇聚焦SLAM和相關(guān)技術(shù)的前沿發(fā)展以及在應(yīng)用領(lǐng)域的行業(yè)機(jī)會(huì),旨在為SLAM技術(shù)和應(yīng)用領(lǐng)域搭建全方位展示與交流平臺(tái),推動(dòng)國(guó)內(nèi)SLAM技術(shù)的發(fā)展以及產(chǎn)學(xué)研
2023-08-01 09:37:23526 近年來,SLAM技術(shù)取得了驚人的發(fā)展,領(lǐng)先一步的激光SLAM已成熟的應(yīng)用于各大場(chǎng)景中,視覺SLAM雖在落地應(yīng)用上不及激光SLAM,但也是目前研究的一大熱點(diǎn),今天我們就來詳細(xì)聊聊視覺SLAM的那些事兒。
2023-09-05 09:31:111389 
提出了一種基于RGB-D圖像序列的協(xié)同隱式神經(jīng)同步定位與建圖(SLAM)系統(tǒng),該系統(tǒng)由完整的前端和后端模塊組成,包括里程計(jì)、回環(huán)檢測(cè)、子圖融合和全局優(yōu)化。
2023-11-29 10:35:18189 
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論