據(jù)國(guó)外媒體報(bào)道,下一代iPhone屏幕可能會(huì)使用有日本NEC開發(fā)設(shè)計(jì)的全新ORB有機(jī)基電池(organic radical battery,亦稱可攜式二次電池)。
2012-04-05 09:23:51 1010
1010 其中,SLAM算法插件提供了SLAM領(lǐng)域流行的優(yōu)秀算法,包括DSO,ORBSLAM,SVO和TheiaSFM等,這些插件可以直接集成到自己的代碼中,研究人員也可以基于這些插件進(jìn)行進(jìn)一步研究或者貢獻(xiàn)自己的插件。此外Rviz也被集成到了這一框架中進(jìn)行可視化交互,讓用戶可以復(fù)用ros中的技能和知識(shí)。
2019-03-07 09:42:597901 
ORB特征是一種圖像識(shí)別、追蹤和匹配中常用的特征,大名鼎鼎的ORB-SLAM就是使用的這一特征。它提取FAST特征點(diǎn),并通過特征點(diǎn)附近的窗口矩計(jì)算特征點(diǎn)的方向,含方向的FAST特征也被稱為oFAST
2020-09-26 11:43:234761 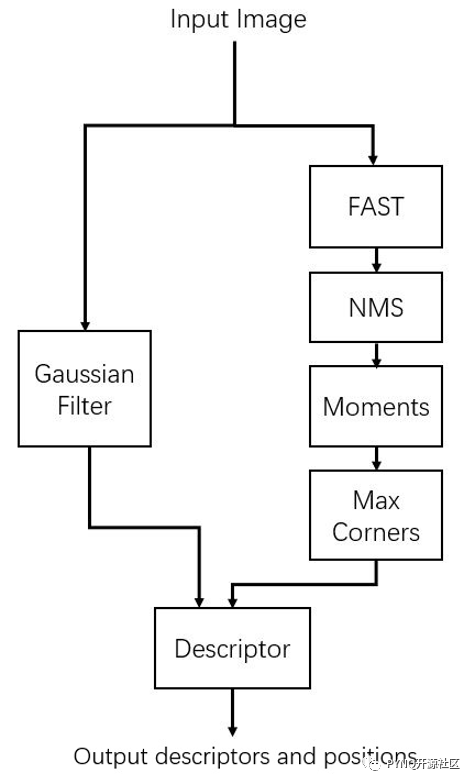
本文提出了一個(gè)魯棒且快速的多模態(tài)語義 SLAM 框架,旨在解決復(fù)雜和動(dòng)態(tài)環(huán)境中的 SLAM 問題。具體來說,將僅幾何聚類和視覺語義信息相結(jié)合,以減少由于小尺度對(duì)象、遮擋和運(yùn)動(dòng)模糊導(dǎo)致的分割誤差的影響。
2022-08-31 09:39:141302 上周的組會(huì)上,我給研一的萌新們講解什么是SLAM,為了能讓他們?cè)跊]有任何基礎(chǔ)的情況下大致聽懂,PPT只能多圖少字沒公式,這里我就把上周的組會(huì)匯報(bào)總結(jié)一下。 這次匯報(bào)的題目我定為“視覺SLAM:一直在
2023-08-21 10:02:071575 
)1.reprap1.0 darwinreprap的打印機(jī)看起來都挺復(fù)雜,是因?yàn)樵O(shè)計(jì)者的初衷就是想讓機(jī)器能夠復(fù)制自己,因此希望各個(gè)組成部分都可以通過3d打印得到(僅僅是理想,實(shí)際還差挺遠(yuǎn))。因此設(shè)計(jì)了光桿框架結(jié)構(gòu)的支撐。從實(shí)用性上來講,這種框架結(jié)構(gòu),首先對(duì)裝配調(diào)結(jié)的要求就很高,其次,主要部件包括電路...
2021-09-01 06:37:00
常有必要的 。 回環(huán)檢測(cè)失敗 如何提升機(jī)器人回環(huán)檢測(cè)能力? 那么,怎么才能讓機(jī)器人的回環(huán)檢測(cè)能力得到一個(gè)質(zhì)的提升呢?首先要有一個(gè)算法上的優(yōu)化。 1. 基于圖優(yōu)化的SLAM算法 基于圖優(yōu)化
2019-03-06 15:38:04
結(jié)合激光雷達(dá)或者攝像頭的方法,讓掃地機(jī)可以高效繪制室內(nèi)地圖,智能分析和規(guī)劃掃地環(huán)境,成功讓自己步入了智能導(dǎo)航的陣列。除了掃地機(jī)之外,SLAM技術(shù)在其他服務(wù)機(jī)器人(例如商場(chǎng)導(dǎo)購(gòu)機(jī)器人、銀行機(jī)器人
2018-12-06 10:25:32
目前,SLAM(即時(shí)定位與地圖構(gòu)建)技術(shù)主要被運(yùn)用于無人機(jī)、無人駕駛、機(jī)器人、AR、智能家居等領(lǐng)域,從各應(yīng)用場(chǎng)景入手,促進(jìn)消費(fèi)升級(jí)。 機(jī)器人 激光+SLAM是目前機(jī)器人自主定位導(dǎo)航所
2020-12-01 14:26:37
研究生期間進(jìn)行了基于2D激光雷達(dá)的SLAM的研究,當(dāng)時(shí)主要做了二維激光雷達(dá)的數(shù)據(jù)處理。小弟不才,沒有入得了SLAM的坑,卻一直謎之向往,如今得以機(jī)會(huì),決定正式邁出第一步,徹底進(jìn)入SLAM的坑!心中
2021-08-30 06:13:31
這里說的框架插件結(jié)構(gòu)是指程序啟動(dòng)時(shí)或運(yùn)行中,去查看硬盤某個(gè)路徑下,有哪些插件模塊,然后把它們調(diào)用起來的這樣一種程序結(jié)構(gòu)。LabVIEW中實(shí)現(xiàn)這樣的程序機(jī)構(gòu)有兩種方法,一是利用LabVIEW Scripting中動(dòng)的態(tài)調(diào)用VI,二是利用LVClass。下面比較一下這兩種方法各自的優(yōu)缺點(diǎn)。轉(zhuǎn)載
2014-11-14 15:43:03
Intelligent Vehicles Applications1. 介紹2. HOOFR-SLAM2.1 系統(tǒng)框架2.2 HOOFR特征提取2.3 映射線程2.3.1 特征匹配1. 介紹提出一種HOOFR-...
2021-12-21 06:35:49
Hadoop是一個(gè)用Java編寫的Apache開源框架,允許使用簡(jiǎn)單的編程模型跨計(jì)算機(jī)集群分布式處理大型數(shù)據(jù)集。Hadoop框架工作的應(yīng)用程序在跨計(jì)算機(jī)集群提供分布式存儲(chǔ)和計(jì)算的環(huán)境中工作
2018-05-11 16:00:10
領(lǐng)夾麥克風(fēng)的無線音頻模組硬件進(jìn)行開箱測(cè)評(píng),快來一起看看吧。RODE錄音麥克風(fēng)整體硬件結(jié)構(gòu)設(shè)計(jì):1看到此板整體布局比較很合理,電池也帶NTC功能。2MIC的密封性做的很好,我們可以借鑒3codec外圍元件比較多,但是根據(jù)測(cè)試底噪也沒有問題。4由最后一張圖看其RF的走線也不是很好,要求盡量的
2022-01-07 08:00:22
完整的編譯器架構(gòu)解決方案,它自定義了IR,對(duì)計(jì)算過程進(jìn)行了抽象化(包括算符,變量等),提供了一個(gè)完整的代碼生成和執(zhí)行框架,開發(fā)者完全可以在其框架內(nèi)改寫自己的編譯器。 TVM整體結(jié)構(gòu)如下
2021-01-07 17:21:48
`[資料分享]+Android框架揭秘一、看威武霸氣的封面作者:(韓)金泰延等 二、讀讀簡(jiǎn)介,看看適合你嗎? 《android框架揭秘》通過對(duì)android系統(tǒng)源代碼的分析,主要介紹android
2015-09-26 09:47:35
創(chuàng)建4.cola_os stime定時(shí)器創(chuàng)建前言在嵌入式軟件開發(fā),包括單片機(jī)開發(fā)中,軟件架構(gòu)對(duì)于開發(fā)人員是一個(gè)必須認(rèn)真考慮的問題。軟件架構(gòu)對(duì)于系統(tǒng)整體的穩(wěn)定性和可靠性是非常重要的,一個(gè)合適的軟件架構(gòu)不僅結(jié)構(gòu)清晰,并且便于開發(fā)。在嵌入式軟件開發(fā)中,程序架構(gòu)主要分為三種。本教程中使用的框架為前后臺(tái)和時(shí)間
2021-11-08 08:17:44
的發(fā)行版不是很多,比如DKhadoop,可以說是目前國(guó)內(nèi)自主做hadoop商業(yè)版比較好的了。下面就以大快搜索DKhadoop為例來給大家介紹一下hadoop框架結(jié)構(gòu)! 圖示:DKhadoop技術(shù)技術(shù)架構(gòu)圖
2018-10-15 15:59:43
System),在ROS系統(tǒng)下編寫驅(qū)動(dòng)程序,驅(qū)動(dòng)機(jī)器人底盤等各種外圍設(shè)備。④運(yùn)行g(shù)oogle的cartographer、facebook的PyRobot、ORB_SLAM2等機(jī)器人SLAM,測(cè)試
2019-07-03 10:50:01
單片機(jī)結(jié)構(gòu)框架框架說明使用說明框架說明通過模擬操作系統(tǒng)方式,實(shí)現(xiàn)C語言由過程化轉(zhuǎn)為對(duì)象化,減少模塊間的耦合度,便于移植與維護(hù)。作為一個(gè)C語言提升項(xiàng)目是一個(gè)很好的工程!使用說明下載工程后,工程本身是一
2021-07-15 08:12:09
卷積神經(jīng)網(wǎng)絡(luò)的層級(jí)結(jié)構(gòu) 卷積神經(jīng)網(wǎng)絡(luò)的常用框架
2020-12-29 06:16:44
,能夠使得該設(shè)備在應(yīng)用的時(shí)候,在各個(gè)環(huán)節(jié)的操作方面都能夠非常方便地進(jìn)行。3、結(jié)構(gòu)設(shè)計(jì)復(fù)雜:就雙色非標(biāo)模具模胚的整體結(jié)構(gòu)來看,其結(jié)構(gòu)設(shè)計(jì)上具體的設(shè)計(jì)是非常復(fù)雜的,并且需要結(jié)構(gòu)的每一個(gè)方面都有非常優(yōu)化的設(shè)計(jì),才能夠在應(yīng)用的時(shí)候,有好的功能發(fā)揮,并呈現(xiàn)出非常好的應(yīng)用效果。
2019-07-22 11:46:40
題目:基于SLAM的移動(dòng)機(jī)器人設(shè)計(jì)嵌入式PPT應(yīng)具有的幾個(gè)部分1、有哪些硬件 1)小車 2)STM32F429開發(fā)板 3)樹莓派3b+開發(fā)板 4)4g通信模塊 5)GPS模塊 6
2021-11-08 06:17:14
基于視覺的slam自動(dòng)駕駛,這是我們測(cè)試的視頻《基于slam算法的智能機(jī)器人》調(diào)研分析報(bào)告項(xiàng)目背景分析機(jī)器人曾經(jīng)是科幻電影中的形象,可目前已經(jīng)漸漸走入我們的生活。機(jī)器人技術(shù)以包含機(jī)械、電子、自動(dòng)控制
2021-08-09 09:37:34
嵌入式系統(tǒng)開發(fā)與應(yīng)用——基于視覺的機(jī)器人SLAM入門實(shí)踐1一、OpenCV的安裝與配置1. 下載OpenCV3.4.1并解壓到ubuntu相應(yīng)目錄上2. 下載安裝依賴庫和編譯工具cmake(1)更新
2021-12-16 08:16:12
本文檔描述并模擬了影響Arm A配置文件規(guī)范的安全風(fēng)險(xiǎn)分析-Arm固件框架的威脅。在典型產(chǎn)品生命周期的不同階段,如需求、設(shè)計(jì)、編碼、測(cè)試和發(fā)布階段,消除缺陷的成本會(huì)迅速增加。此外,修復(fù)體系結(jié)構(gòu)規(guī)范中
2023-08-09 07:26:42
嵌入式學(xué)習(xí)框架1.學(xué)習(xí)來源1.1 51otc在線學(xué)習(xí)(適用于后期學(xué)習(xí))1.2 網(wǎng)易云課程1.3 大學(xué)生慕課網(wǎng)1.4 圖書館書籍1.5 小平板的電子書1.6 向同學(xué)請(qǐng)教2.學(xué)習(xí)的的整體框架圖3.現(xiàn)階段
2021-10-27 09:01:08
大家好,我想學(xué)習(xí)SLAM技術(shù)有資深的老師愿意教我嗎?qq:496397940
2018-11-09 13:42:27
背景:對(duì)于一些需要快速驗(yàn)證傳感器性能,或者某些實(shí)驗(yàn)需要快速采集數(shù)據(jù)并且需要直觀顯示成波形或者圖片, 搭建一個(gè)簡(jiǎn)易方便的數(shù)據(jù)采集分析系統(tǒng)是有必要的.本文主要介紹以下幾個(gè)方面:數(shù)據(jù)采集整體框架.Pc
2021-08-17 08:46:53
0、整體結(jié)構(gòu)與功能模塊1、樹莓派刷寫鏡像2、無顯示器配置wifi并開啟ssh3、配置samba4、配置STM32控制板5、底盤結(jié)構(gòu)
2021-08-11 07:03:32
我想吧代碼寫個(gè)框架,類似PLC 程序執(zhí)行 結(jié)構(gòu)。,掃描-》執(zhí)行》輸出循環(huán)。。。。。還有需要延遲而不影響整體掃描,類似PLC定時(shí)器。不知道思路。。大神們有沒有列子謝謝了
2017-03-13 10:00:35
的視覺里程計(jì)及后端優(yōu)化的
SLAM系統(tǒng),似乎已經(jīng)比較好用了。但其在提高實(shí)時(shí)性的同時(shí)精度卻降低了,一旦精度降低,又會(huì)面臨長(zhǎng)時(shí)間累計(jì)誤差的問題,特別是像
ORB-SLAM那樣只做局部地圖優(yōu)化的方案。我們?cè)?/div>
2018-10-23 17:47:22
SLAM(同步定位與地圖構(gòu)建),是指運(yùn)動(dòng)物體根據(jù)傳感器的信息,一邊計(jì)算自身位置,一邊構(gòu)建環(huán)境地圖的過程,解決機(jī)器人等在未知環(huán)境下運(yùn)動(dòng)時(shí)的定位與地圖構(gòu)建問題。目前,SLAM 的主要應(yīng)用于機(jī)器人、無人機(jī)、無人駕駛、AR、VR 等領(lǐng)域。其用途包括傳感器自身的定位,以及后續(xù)的路徑規(guī)劃、運(yùn)動(dòng)性能、場(chǎng)景理解。
2020-05-20 08:19:40
機(jī)器人定位導(dǎo)航中,目前主要涉及到激光SLAM與視覺SLAM,激光SLAM在理論、技術(shù)和產(chǎn)品落地上都較為成熟,因而成為現(xiàn)下最為主流的定位導(dǎo)航方式,在家用掃地機(jī)器人及商用送餐機(jī)器人等服務(wù)機(jī)器人中普遍采用了...
2021-07-05 06:41:57
什么是激光SLAM?視覺VSLAM又是什么?激光SLAM和視覺VSLAM有哪些不同之處?
2021-11-10 07:16:02
什么是激光SLAM?激光SLAM技術(shù)在機(jī)器人運(yùn)動(dòng)控制系統(tǒng)中的應(yīng)用是什么?
2021-07-30 06:37:25
模塊之后再去獨(dú)立運(yùn)行下一個(gè)模塊。問題:我該從哪方面下手,是不是該用些高級(jí)的程序結(jié)構(gòu)去實(shí)現(xiàn)?怎樣才能隨心所欲的控制 子vi 調(diào)用問題?以往都是編一個(gè)模塊就沒了,現(xiàn)在模塊多了想實(shí)現(xiàn)大框架的一些編程。
2015-12-24 09:13:44
所謂linux驅(qū)動(dòng)編程可以理解為linux內(nèi)核的編程。既然在內(nèi)核編程那就必須要符合內(nèi)核的邏輯和各種規(guī)定好的框架。Linux中使用了大量的結(jié)構(gòu)體方便我們?cè)谑褂脙?nèi)核的時(shí)候調(diào)用。很多單片機(jī)開發(fā)者其實(shí)對(duì)于
2022-01-19 08:26:28
視覺SLAM——特征點(diǎn)法與直接法對(duì)比以及主流開源方案對(duì)比 ORB LSD SVO DSO
2020-06-02 16:56:49
【總結(jié)】視覺SLAM筆記整理
2020-07-17 14:05:20
過程中調(diào)整了圖結(jié)構(gòu)中每個(gè)節(jié)點(diǎn)的pose和對(duì)應(yīng)的傳感器信息以及所有關(guān)鍵點(diǎn)構(gòu)建的位姿關(guān)系圖,利用全部的機(jī)器人位姿信息和對(duì)應(yīng)傳感器數(shù)據(jù)生成環(huán)境地圖。 SLAM 3.0 編碼了機(jī)器人在SLAM過程中的位
2019-01-21 10:57:46
分類梳理:功能性:功能性分析指研究結(jié)構(gòu)在各種工況載荷作用下能否實(shí)現(xiàn)預(yù)定功能。安全性:安全性分析是指計(jì)算結(jié)構(gòu)在各種工況載荷作用下能否安全運(yùn)行。可靠性:可靠性分析主要研究電機(jī)各零部件及整體在規(guī)定的時(shí)間內(nèi)
2018-10-31 10:36:05
最近想用樹莓派3B跑ORB-SLAM2,現(xiàn)在的問題就是Pangolin無法執(zhí)行,每次執(zhí)行都報(bào)錯(cuò) Pangolin X11: Unable to retrieve framebuffer
2018-03-15 22:30:11
基于DSP的TSC型動(dòng)態(tài)無功補(bǔ)償裝置matlab仿真整體結(jié)構(gòu)圖啊,謝謝
2013-04-09 15:52:39
實(shí)現(xiàn)單目視覺同時(shí)定位與建圖(SLAM)仿真系統(tǒng),描述其設(shè)計(jì)過程。該系統(tǒng)工作性能良好,其SLAM算法可擴(kuò)展性強(qiáng),可以精確逼近真實(shí)單目視覺SLAM過程。以方便SLAM算法的研究為目標(biāo),提
2009-04-15 08:50:37 82
82 PCB板的整體布局與印刷結(jié)構(gòu)內(nèi)容有怎樣選定電路的排版方向,整體布局,面板外元和接線草圖,印制板尺寸草圖等內(nèi)容。
2009-09-30 12:33:120 USB的結(jié)構(gòu)框架
2009-05-06 17:05:44806 為了快速掌握PIC單片機(jī)源程序的基本結(jié)構(gòu),這里給出一個(gè)典型的程序結(jié)構(gòu)框架。
2012-06-27 13:41:235433 針對(duì)定向二進(jìn)制簡(jiǎn)單描述符( ORB)算法不具備尺度不變性的問題,提出一種結(jié)合快速魯棒性特征( SURF)算法和ORB的改進(jìn)算法。首先,利用Hessian矩陣檢測(cè)特征點(diǎn)的方法,使得提取出的特征點(diǎn)具有
2017-12-15 17:15:1121 針對(duì)復(fù)雜環(huán)境下機(jī)器人的同時(shí)定位與地圖構(gòu)建( SLAM)存在實(shí)時(shí)性與魯棒性下降等問題,將一種基于ORB特征點(diǎn)的關(guān)鍵幀閉環(huán)檢測(cè)匹配算法應(yīng)用到定位與地圖構(gòu)建巾。研究并分析了特征點(diǎn)提取與描述符建立
2018-03-26 10:57:326 高仙的SLAM2.0技術(shù)體系核心,是基于多傳感器融合+深度學(xué)習(xí)的架構(gòu),即語義SLAM。高仙SLAM2.0技術(shù)方案以語義分析、機(jī)器學(xué)習(xí)為基礎(chǔ),結(jié)合云端實(shí)時(shí)信息處理以及專為多傳感器融合而開發(fā)的專業(yè)算法體系,真正實(shí)現(xiàn)了SLAM在建圖和導(dǎo)航兩個(gè)環(huán)節(jié)的完整應(yīng)用。
2018-05-15 16:48:308535 概述裸機(jī)框架源代碼的結(jié)構(gòu)以及框架各部分的整體功能
2019-06-27 06:05:002641 
SLAM技術(shù)將賦予為機(jī)器人和智能體前所未有的行動(dòng)能力。作為當(dāng)前SLAM框架的主要類型,激光SLAM與視覺SLAM必將在相互競(jìng)爭(zhēng)和融合中發(fā)展,必將帶來機(jī)器人技術(shù)和人工智能技術(shù)的真正革命,也將使得機(jī)器人從實(shí)驗(yàn)室和展示廳中走出來,真正服務(wù)和解放人類。
2019-05-25 09:43:524276 運(yùn)動(dòng)恢復(fù)結(jié)構(gòu)(SfM)和 SLAM 所解決的問題非常相似,但 SfM 傳統(tǒng)上是以離線形式進(jìn)行的,而 SLAM 則已經(jīng)慢慢走向了低功耗/實(shí)時(shí)/單 RGB 相機(jī)的運(yùn)行模式。
2019-11-22 14:34:0716984 
如今科技發(fā)展日新月異,諸如機(jī)器人、AR/VR等前沿科技產(chǎn)品已走入了大眾生活當(dāng)中。但是想在這些領(lǐng)域讓用戶有更好的體驗(yàn),就需要很多底層技術(shù)的支持,SLAM就是其中之一。如果說機(jī)器人離開了SLAM
2020-04-17 09:21:4153848 靜強(qiáng)度分析考察塔筒承受極限載荷的能力,是對(duì)結(jié)構(gòu)強(qiáng)度最基礎(chǔ)的檢驗(yàn),在工程設(shè)計(jì)中往往以靜強(qiáng)度分析結(jié)果為參考對(duì)塔筒整體尺寸進(jìn)行改型設(shè)計(jì)。塔筒幾何模型,模型省略了一些附屬結(jié)構(gòu),比如爬梯、平臺(tái)、通風(fēng)口等。
2020-06-09 11:26:0611243 在業(yè)內(nèi),視覺SLAM與激光SLAM誰更勝一籌,誰將成為未來主流趨勢(shì)這一問題,成為大家關(guān)注的熱點(diǎn),不同的人也有不同的看法及見解,以下將從成本、應(yīng)用場(chǎng)景、地圖精度、易用性幾個(gè)方面來進(jìn)行詳細(xì)闡述。
2020-08-28 14:53:3016068 
本次分享先主要圍繞以下3個(gè)方面展開,互動(dòng)白板的產(chǎn)品能力簡(jiǎn)要介紹,互動(dòng)白板的整體技術(shù)框架介紹還有互動(dòng)白板的技術(shù)優(yōu)勢(shì)解析。技術(shù)點(diǎn)主要圍繞音視頻與白板的同步和多端實(shí)時(shí)互動(dòng)同步講解。
2020-09-16 10:56:064144 
的目標(biāo)檢測(cè)算法引入到經(jīng)典ORB_SLAM2方法中,將特征點(diǎn)分為潛在動(dòng)態(tài)特征點(diǎn)和非潛在動(dòng)態(tài)特征點(diǎn),基于非潛在動(dòng)態(tài)特征點(diǎn)計(jì)算運(yùn)動(dòng)模型,篩選岀應(yīng)用場(chǎng)景中的靜態(tài)特征點(diǎn)并實(shí)現(xiàn)位姿跟蹤,利用非潛在動(dòng)態(tài)特征點(diǎn)中的靜態(tài)特征點(diǎn)進(jìn)行地圖構(gòu)建。KITⅠ和TUM數(shù)據(jù)
2021-03-18 10:39:3916 我看來,vslam得發(fā)展也就是從MonoSLAM->PTAM->圖優(yōu)化SLAM->ORB-SLAM為代表的現(xiàn)代slam,其中可能還有許多內(nèi)容,不過這些開源SLAM一定程度上體現(xiàn)了SLAM發(fā)展過程了....
2021-06-18 10:40:521357 
ORB-SLAM)的定位精度不能達(dá)到論文中,或者你預(yù)想的精度,那么這個(gè)事情是可以根據(jù)實(shí)際場(chǎng)景討論的。 排名6, 11, 12, 14, 15的方案是基于視覺的,或者至少融合了視覺。其漂移誤差大都低于1%。這是什么概念?我本科時(shí)參加的機(jī)器人競(jìng)賽里,經(jīng)過仔細(xì)標(biāo)定的輪式
2021-07-06 10:57:043582 openBLT-系統(tǒng)結(jié)構(gòu)及框架前言1 框架1.1設(shè)備層1.2中間件1.2.1 COM1.2.2 BACKDOOR1.2.3 FILE1.3應(yīng)用層前言openBLT 是開源的小型嵌入式系統(tǒng)
2021-12-08 14:21:112 常規(guī)自動(dòng)化程序框架結(jié)構(gòu),方便程序編寫提高工程效率。
2022-02-22 14:30:1431 算法框架和關(guān)鍵模塊, 分析闡述了近年來的研究熱點(diǎn)問題和未來發(fā)展趨勢(shì), 梳理了3D激光雷達(dá) SLAM 算法性能的評(píng)估標(biāo)準(zhǔn), 并據(jù)此選取目前較為成熟的具有代表性的6種開源 3D 激光雷達(dá)SLAM 算法
2022-03-21 16:07:574576 ./oschina_soft/Snake-SLAM.zip
2022-06-16 11:27:432 作為開發(fā)覆蓋分析工具內(nèi)部測(cè)試框架的一部分,我們?cè)O(shè)計(jì)了一種方法,其中對(duì)覆蓋結(jié)果的期望在測(cè)試源中表示為特殊注釋。此
2022-06-19 11:09:15840 
作為開發(fā)覆蓋分析工具內(nèi)部測(cè)試框架的一部分,我們?cè)O(shè)計(jì)了一種方法,其中對(duì)覆蓋結(jié)果的期望在測(cè)試源中表示為特殊注釋。
2022-07-05 09:10:29667 
在SLAM框架上面我肯定自己寫不了,這里研究了一下午,使用了ORB-SLAM。
2022-08-16 10:57:49906 LINS是以濾波為主的IMU、激光雷達(dá)緊耦合的激光SLAM算法。該算法的主要?jiǎng)?chuàng)新點(diǎn)就是用以 IESKF(即迭代誤差卡爾曼)為框架,融合 IMU 與激光雷達(dá)。該算法于發(fā)表于 2020 年 ICRA
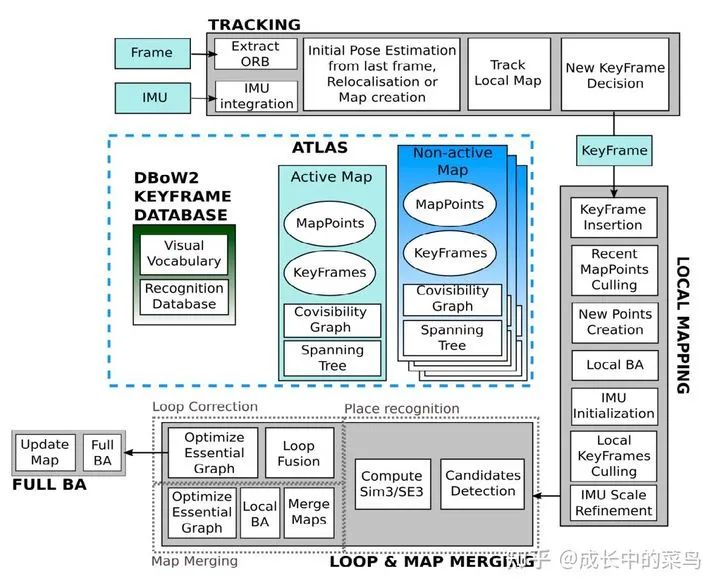
2022-10-09 14:57:122243 ORB-SLAM 3提供了多地圖的存儲(chǔ)和拼接功能,在跟蹤丟失后可以嘗試將現(xiàn)有地圖和歷史地圖進(jìn)行匹配、融合,并更新當(dāng)前的活躍地圖(Active Map)
2022-10-28 14:28:05927 視覺SLAM是一種基于視覺傳感器的 SLAM 系統(tǒng),與激光傳感器相比,視覺傳感器具有成本低、保留環(huán)境語義信息的優(yōu)點(diǎn),能夠與深度學(xué)習(xí)進(jìn)行大量結(jié)合。
2022-11-02 15:02:32747 一個(gè)建立在兩個(gè)基于直接法的緊耦合的完整的激光視覺慣導(dǎo)融合的slam框架;
2022-11-09 09:55:541148 SLAM 是 Simultaneous Localization and Mapping 的縮寫,中文譯作“同時(shí)定位與地圖構(gòu)建”。它是指搭載特定傳感器的主體,在沒有環(huán)境先驗(yàn)信息的情況下,于運(yùn)動(dòng)過程中建立環(huán)境的模型,同時(shí)估計(jì)自己的運(yùn)動(dòng)。如果這里的傳感器主要為相機(jī),那就稱為“視覺 SLAM”。
2022-12-05 10:16:311248 手持SLAM設(shè)備最大的特點(diǎn)肯定要放到手持這個(gè)動(dòng)作上面,由于SLAM算法的優(yōu)越性,手持可以做到走到哪里測(cè)到哪里。
2022-12-27 10:43:413287 自主導(dǎo)航是機(jī)器人基礎(chǔ)性和關(guān)鍵性技術(shù),是機(jī)器人實(shí)現(xiàn)其他更高級(jí)任務(wù)的前提。視覺 SLAM (Simultaneous Localization And Mapping) 利用視覺傳感器獲取環(huán)境圖像信息,基于多視圖幾何算法構(gòu)建環(huán)境地圖。
2023-01-16 10:58:292085 視覺里程計(jì)最近幾年越來越受到學(xué)術(shù)界以及工業(yè)界的認(rèn)可,以ORB和VINS為代表的視覺SLAM已經(jīng)可以滿足絕大多數(shù)場(chǎng)景,而OV2SLAM在其他VSLAM中脫穎而出,其實(shí)時(shí)性以及具體的回環(huán)性能在測(cè)試中都得到了認(rèn)可。
2023-03-21 17:16:31768 LED顯示屏鋼結(jié)構(gòu)框架工程是顯示屏安裝的基本工程,顯示屏部件通過鋼結(jié)構(gòu)框架將屏體牢固拼接成為一個(gè)整體,并且將屏體和建筑主體聯(lián)接在一起,承載屏體的重量和所受的其他外力。
2023-04-08 10:08:341814 深度學(xué)習(xí)提取的特征就一定好?顯然不是的。因?yàn)閿?shù)據(jù)集的原因,利用深度學(xué)習(xí)訓(xùn)練出的特征子適用性并不一定好。貌似網(wǎng)上有一篇論文,利用orbslam框架,對(duì)比了orb和superpoint的效果。發(fā)現(xiàn)有幾組
2023-05-19 10:25:57829 
與ORB-SLAM2相比,ORB-SLAM3在處理大視差和長(zhǎng)時(shí)間未觀測(cè)到的場(chǎng)景時(shí)效果更好。它還提供了更準(zhǔn)確的幀間運(yùn)動(dòng)估計(jì)和更快的處理速度。
2023-06-19 09:28:121968 
能力也過硬,一般企業(yè)年薪至少30W起步了。 學(xué)習(xí)SLAM主要需要攻克三大難關(guān): 扎實(shí)的數(shù)學(xué)基礎(chǔ) 對(duì)整個(gè)SLAM大框架及細(xì)節(jié)部分理解到一定深度 比較高度的編程能力 這三點(diǎn)都絕非易事,需要花很大的功夫,中間也有不少?gòu)澛芬摺?對(duì)于初學(xué)者,推薦以下
2023-06-29 15:28:55337 
對(duì)于學(xué)術(shù)研究而言,LeGo-LOAM是激光SLAM的經(jīng)典框架,LeGo-LOAM源碼簡(jiǎn)潔清晰,比LOAM算法的代碼可讀性要高很多。近幾年各頂會(huì)上的很多SLAM算法設(shè)計(jì)思想都潛移默化地受LeGo-LOAM的影響,對(duì)其的改進(jìn)思路相較于LOAM也比較多樣化。
2023-07-03 10:47:08415 
近日,全國(guó)SLAM技術(shù)論壇于廈門大學(xué)舉辦。本次論壇聚焦SLAM和相關(guān)技術(shù)的前沿發(fā)展以及在應(yīng)用領(lǐng)域的行業(yè)機(jī)會(huì),旨在為SLAM技術(shù)和應(yīng)用領(lǐng)域搭建全方位展示與交流平臺(tái),推動(dòng)國(guó)內(nèi)SLAM技術(shù)的發(fā)展以及產(chǎn)學(xué)研
2023-08-01 09:37:23526 SLAM至今已歷經(jīng)三十多年的研究,這里給出經(jīng)典視覺SLAM框架,這個(gè)框架本身及其包含的算法已經(jīng)基本定型,并且已經(jīng)在許多視覺程序庫和機(jī)器人程序庫中提供。
2023-08-10 14:15:53410 
近年來,SLAM技術(shù)取得了驚人的發(fā)展,領(lǐng)先一步的激光SLAM已成熟的應(yīng)用于各大場(chǎng)景中,視覺SLAM雖在落地應(yīng)用上不及激光SLAM,但也是目前研究的一大熱點(diǎn),今天我們就來詳細(xì)聊聊視覺SLAM的那些事兒。
2023-09-05 09:31:111389 
一、ANB.ORB指令 在梯形圖中,可能會(huì)出現(xiàn)電路塊與電路塊串聯(lián)或者電路塊與電路塊并聯(lián)的情況,這時(shí)就要使用ANB指令或ORB指令。ANB指令稱為“電路塊與指令”,其功能是使電路塊與電路塊串聯(lián)。ORB
2023-09-18 09:59:212508 工業(yè)建模對(duì)于精度有著高要求,這意味著無人機(jī)的 SLAM 算法要提供可靠的實(shí)時(shí)位姿估計(jì)。ORB-SLAM3 是目前融合雙目視覺與 IMU 的優(yōu)秀算法,其前端是針對(duì)實(shí)時(shí)性優(yōu)化的 ORB 描述子與關(guān)鍵幀
2023-09-18 10:12:49444 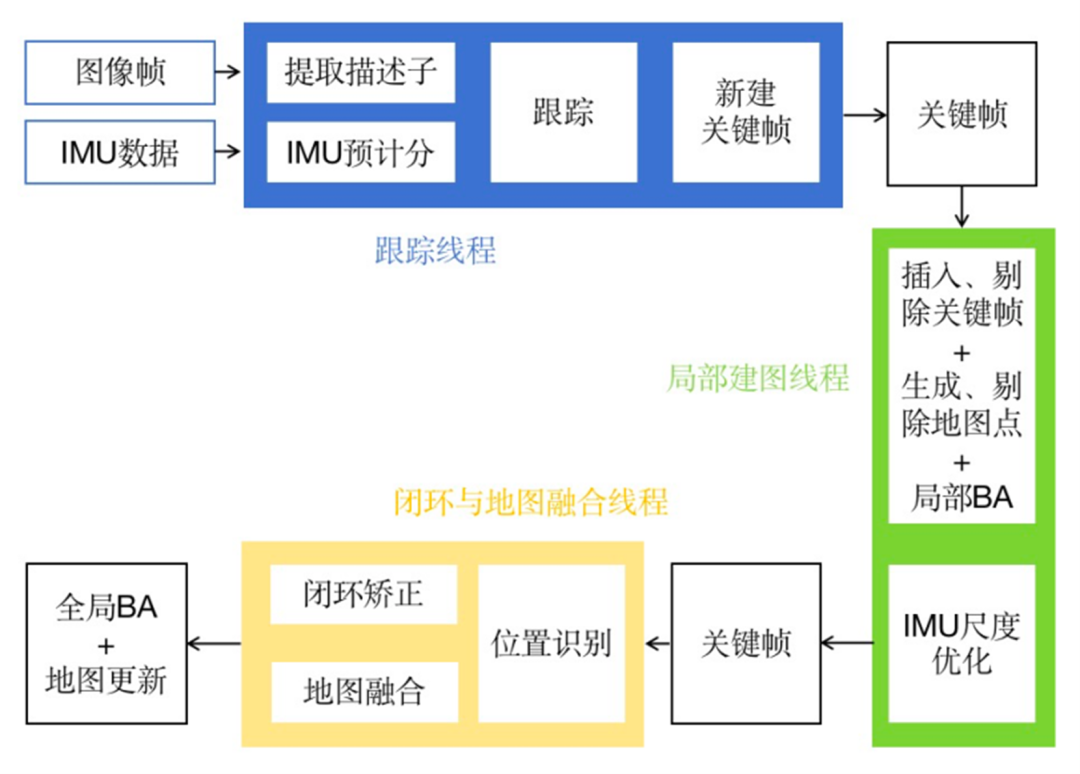
地圖點(diǎn)/路標(biāo)點(diǎn):將圖像上被觀察到的特征點(diǎn)通過三角化等方式進(jìn)行深度恢復(fù),我們就可以得到其對(duì)應(yīng)的在三維空間的位置,同時(shí)包含幀的觀測(cè)信息,這種點(diǎn)就被稱為地圖點(diǎn)或路標(biāo)點(diǎn)。
2023-11-09 17:25:17559 
定位準(zhǔn)確性:與六種最新的里程計(jì)和SLAM方法進(jìn)行比較,包括KISS-ICP、LeGO-LOAM、SC-LeGO-LOAM、MULLS、CT-ICP和GeoTransformer。在SemanticKITTI、KITTI-360和MulRan數(shù)據(jù)集上比較了DeepPointMap與這些方法的定位準(zhǔn)確性。
2023-12-29 11:48:09239 
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論