電子發(fā)燒友網(wǎng)報(bào)道(文/李彎彎)深度學(xué)習(xí)框架是一種底層開(kāi)發(fā)工具,是集深度學(xué)習(xí)核心訓(xùn)練和推理框架、基礎(chǔ)模型庫(kù)、端到端開(kāi)發(fā)套件、豐富的工具組件于一體的平臺(tái)。 ? 有了深度學(xué)習(xí)框架,工程師在工作時(shí)調(diào)
2022-06-07 00:01:00 3415
3415 一個(gè)非常有意思且非常重要的副產(chǎn)物。另一個(gè)是深度學(xué)習(xí)框架的可觸碰深度,這點(diǎn)直接關(guān)系到深度學(xué)習(xí)系統(tǒng)的發(fā)展未來(lái)和用戶的自由度。
2016-11-26 10:00:392315 現(xiàn)在數(shù)據(jù)科學(xué)領(lǐng)域最熱門(mén)的方向仍舊是深度學(xué)習(xí)。相應(yīng)地,深度學(xué)習(xí)框架也處于飛速變革之中。現(xiàn)在最流行的框架,除Theano外,5年前都不存在。
2018-10-15 11:50:178557 其中,SLAM算法插件提供了SLAM領(lǐng)域流行的優(yōu)秀算法,包括DSO,ORBSLAM,SVO和TheiaSFM等,這些插件可以直接集成到自己的代碼中,研究人員也可以基于這些插件進(jìn)行進(jìn)一步研究或者貢獻(xiàn)自己的插件。此外Rviz也被集成到了這一框架中進(jìn)行可視化交互,讓用戶可以復(fù)用ros中的技能和知識(shí)。
2019-03-07 09:42:597901 
據(jù)官方消息,清華大學(xué)計(jì)算機(jī)系圖形實(shí)驗(yàn)室宣布開(kāi)源一個(gè)全新的深度學(xué)習(xí)框架:Jittor,中文名計(jì)圖。 Jittor 是一個(gè)采用元算子表達(dá)神經(jīng)網(wǎng)絡(luò)計(jì)算單元、完全基于動(dòng)態(tài)編譯(Just-in-Time
2020-11-25 11:08:372782 什么是光探測(cè)和測(cè)距 (LiDAR)?LiDAR 將雷達(dá)測(cè)距能力與相機(jī)的角分辨率相結(jié)合,提供準(zhǔn)確的深度感知傳感以完成圖像。
2022-02-06 07:54:0010375 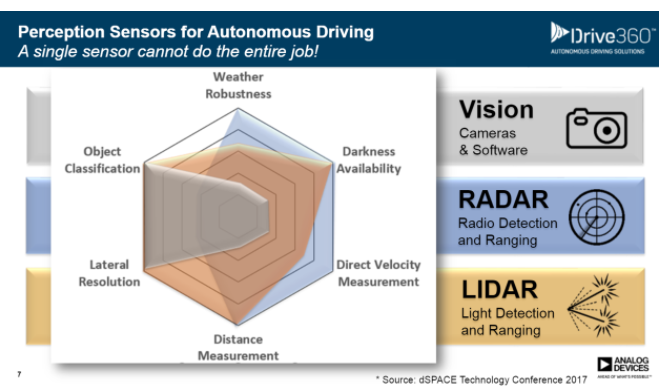
本文提出了一個(gè)魯棒且快速的多模態(tài)語(yǔ)義 SLAM 框架,旨在解決復(fù)雜和動(dòng)態(tài)環(huán)境中的 SLAM 問(wèn)題。具體來(lái)說(shuō),將僅幾何聚類和視覺(jué)語(yǔ)義信息相結(jié)合,以減少由于小尺度對(duì)象、遮擋和運(yùn)動(dòng)模糊導(dǎo)致的分割誤差的影響。
2022-08-31 09:39:141302 近日,國(guó)產(chǎn)深度學(xué)習(xí)框架OneFlow發(fā)布了人工智能方向深度學(xué)習(xí)領(lǐng)域的DLPerf測(cè)評(píng)報(bào)告,填補(bǔ)了業(yè)內(nèi)針對(duì)深度學(xué)習(xí)框架測(cè)評(píng)的空白。 報(bào)告數(shù)據(jù)顯示,OneFlow
2020-12-17 09:31:503887 也將SLAM分為激光SLAM和視覺(jué)SLAM。激光SLAM比視覺(jué)SLAM起步早,在理論、技術(shù)和產(chǎn)品落地上都相對(duì)成熟。基于視覺(jué)的 SLAM 方案目前主要有兩種實(shí)現(xiàn)路徑,一種是基于 RGBD 的深度攝像機(jī)
2018-12-06 10:25:32
TensorFlow&TensorFlow-GPU:深度學(xué)習(xí)框架TensorFlow&TensorFlow-GPU的簡(jiǎn)介、安裝、使用方法詳細(xì)攻略
2018-12-25 17:21:10
CPU優(yōu)化深度學(xué)習(xí)框架和函數(shù)庫(kù)機(jī)器學(xué)***器
2021-02-22 06:01:02
設(shè)計(jì)支持深度學(xué)習(xí)功能的系統(tǒng)時(shí)必須考慮這些限制因素。開(kāi)發(fā)人員可以使用前端工具,如Caffe(最初由加州大學(xué)伯克利分校開(kāi)發(fā)的深度學(xué)習(xí)框架)或TensorFlow(谷歌的發(fā)明)來(lái)開(kāi)發(fā)總網(wǎng)絡(luò)、層和相應(yīng)的功能,以及
2019-03-13 06:45:03
(包括振動(dòng),圖像,時(shí)間序列和結(jié)構(gòu)化數(shù)據(jù))的普遍適用性。它還揭示了深度學(xué)習(xí)為主要PHM子字段提供了萬(wàn)能的框架:故障
2021-07-12 06:46:47
深度學(xué)習(xí)常用模型有哪些?深度學(xué)習(xí)常用軟件工具及平臺(tái)有哪些?深度學(xué)習(xí)存在哪些問(wèn)題?
2021-10-14 08:20:47
Intelligent Vehicles Applications1. 介紹2. HOOFR-SLAM2.1 系統(tǒng)框架2.2 HOOFR特征提取2.3 映射線程2.3.1 特征匹配1. 介紹提出一種HOOFR-...
2021-12-21 06:35:49
就能實(shí)現(xiàn)!還請(qǐng)關(guān)注我后面的日記。實(shí)際上我也是剛剛有時(shí)間學(xué)習(xí)深度學(xué)習(xí),我是個(gè)純初學(xué)者,但面對(duì)深度學(xué)習(xí)里的各種復(fù)雜理論和公式推導(dǎo),自己實(shí)現(xiàn)個(gè)小功能會(huì)更快了解入門(mén),因此我會(huì)從現(xiàn)有深度學(xué)習(xí)框架
2018-06-04 22:32:12
&保存后退出,重啟tightvncserver : # tightvncserver :1 安裝深度學(xué)習(xí)框架前的準(zhǔn)備工作: 一.在Nanopi2上編譯大型程序,有時(shí)會(huì)出現(xiàn)g++
2018-06-05 17:29:51
“Using TensorFlow backend”說(shuō)明使用的是TensorFlow后端,使用keras必須安裝TensorFlow,Theano,或者 CNTK之一,后端的意思是使用某一底層深度學(xué)習(xí)框架
2018-06-08 19:54:11
Py之TFCudaCudnn:Win10下安裝深度學(xué)習(xí)框架Tensorflow+Cuda+Cudnn最簡(jiǎn)單最快捷最詳細(xì)攻略
2018-12-20 10:35:16
當(dāng)Spark遇上TensorFlow分布式深度學(xué)習(xí)框架原理和實(shí)踐
2019-09-09 08:46:51
近幾年各種深度學(xué)習(xí)框架涌現(xiàn),大家可能很難從眾多的深度學(xué)習(xí)框架中選擇一個(gè)合適的框架進(jìn)行學(xué)習(xí)。對(duì)于深度學(xué)習(xí)的初學(xué)者,或者覺(jué)得Tensorflow,Caffe等框架學(xué)習(xí)困難難以上手的人,可以考慮學(xué)習(xí)
2018-07-17 11:40:31
DL:主流深度學(xué)習(xí)框架多個(gè)方向PK比較
2018-12-26 11:10:18
不斷變化的,因此深度學(xué)習(xí)是人工智能AI的重要組成部分。可以說(shuō)人腦視覺(jué)系統(tǒng)和神經(jīng)網(wǎng)絡(luò)。2、目標(biāo)檢測(cè)、目標(biāo)跟蹤、圖像增強(qiáng)、強(qiáng)化學(xué)習(xí)、模型壓縮、視頻理解、人臉技術(shù)、三維視覺(jué)、SLAM、GAN、GNN等。
2020-11-27 11:54:42
深度學(xué)習(xí)是什么意思
2020-11-11 06:58:03
什么是深度學(xué)習(xí)為了解釋深度學(xué)習(xí),有必要了解神經(jīng)網(wǎng)絡(luò)。神經(jīng)網(wǎng)絡(luò)是一種模擬人腦的神經(jīng)元和神經(jīng)網(wǎng)絡(luò)的計(jì)算模型。作為具體示例,讓我們考慮一個(gè)輸入圖像并識(shí)別圖像中對(duì)象類別的示例。這個(gè)例子對(duì)應(yīng)機(jī)器學(xué)習(xí)中的分類
2023-02-17 16:56:59
在RK3399開(kāi)發(fā)板上如何去實(shí)現(xiàn)一種人工智能深度學(xué)習(xí)框架呢?
2022-03-07 07:00:05
大家好,我想學(xué)習(xí)SLAM技術(shù)有資深的老師愿意教我嗎?qq:496397940
2018-11-09 13:42:27
機(jī)器人定位導(dǎo)航中,目前主要涉及到激光SLAM與視覺(jué)SLAM,激光SLAM在理論、技術(shù)和產(chǎn)品落地上都較為成熟,因而成為現(xiàn)下最為主流的定位導(dǎo)航方式,在家用掃地機(jī)器人及商用送餐機(jī)器人等服務(wù)機(jī)器人中普遍采用了...
2021-07-05 06:41:57
`迅為率先在RK3399 開(kāi)發(fā)板上支持了Docker、TensorFlow目標(biāo)檢測(cè)API、OpenCV、Keras、scikit-learn、pytorch和Python等,組成了人工智能深度學(xué)習(xí)
2021-05-21 17:28:46
項(xiàng)目組基于深度學(xué)習(xí)實(shí)現(xiàn)了視頻風(fēng)格化和人像摳圖的功能,但這是在PC/服務(wù)端上跑的,現(xiàn)在需要移植到移動(dòng)端,因此需要一個(gè)移動(dòng)端的深度學(xué)習(xí)的計(jì)算框架。 同類型的庫(kù) caffe-Android-lib 目前
2017-09-28 20:02:26 0
0 本節(jié)對(duì)5個(gè)開(kāi)源深度學(xué)習(xí)框架進(jìn)行對(duì)比研究,主要側(cè)重于3個(gè)維度研究:硬件支持率、速度和準(zhǔn)確率、社區(qū)活躍性。他們分別是:TensorFlow、Caffe、Keras、Torch、DL4j 。 2.3.1
2017-11-15 12:04:003896 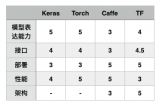
開(kāi)源的深度學(xué)習(xí)神經(jīng)網(wǎng)絡(luò)正步入成熟,而現(xiàn)在有許多框架具備為個(gè)性化方案提供先進(jìn)的機(jī)器學(xué)習(xí)和人工智能的能力。那么如何決定哪個(gè)開(kāi)源框架最適合你呢?本文試圖通過(guò)對(duì)比深度學(xué)習(xí)各大框架的優(yōu)缺點(diǎn),從而為各位讀者提供
2017-11-15 19:04:0822198 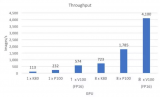
Google近日發(fā)布了TensorFlow 1.0候選版,這第一個(gè)穩(wěn)定版將是深度學(xué)習(xí)框架發(fā)展中的里程碑的一步。自TensorFlow于2015年底正式開(kāi)源,距今已有一年多,這期間TensorFlow
2017-11-16 11:52:014287 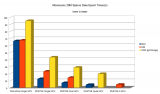
總體來(lái)講keras這個(gè)深度學(xué)習(xí)框架真的很“簡(jiǎn)易”,它體現(xiàn)在可參考的文檔寫(xiě)的比較詳細(xì),不像caffe,裝完以后都得靠技術(shù)博客,keras有它自己的官方文檔(不過(guò)是英文的),這給初學(xué)者提供了很大的學(xué)習(xí)空間。
2017-12-15 08:22:044391 深度學(xué)習(xí)正以迅雷不及掩耳之勢(shì)發(fā)展著,近幾年各種不同的深度學(xué)習(xí)框架也如雨后春筍般紛紛出現(xiàn),在大廠的支持下這些框架在深度學(xué)習(xí)的舞臺(tái)上華麗登場(chǎng)各顯神通。
2018-01-05 15:12:588403 
1月17日,院友袁進(jìn)輝博士回到微軟亞洲研究院做了題為《打造最強(qiáng)深度學(xué)習(xí)引擎》的報(bào)告,分享了深度學(xué)習(xí)框架方面的技術(shù)進(jìn)展。
2018-01-25 09:23:454492 
深度學(xué)習(xí)框架是幫助使用者進(jìn)行深度學(xué)習(xí)的工具,它的出現(xiàn)降低了深度學(xué)習(xí)入門(mén)的門(mén)檻,你不需要從復(fù)雜的神經(jīng)網(wǎng)絡(luò)開(kāi)始編代碼,就可以根據(jù)需要使用現(xiàn)有的模型。 做個(gè)比喻,一套深度學(xué)習(xí)框架就像是一套積木,各個(gè)組件就是某個(gè)模型或算法的一部分,使用者可以自己設(shè)計(jì)和組裝符合相關(guān)數(shù)據(jù)集需求的積木。
2018-02-13 03:43:002899 
Caffe是一個(gè)深度學(xué)習(xí)框架,具有表達(dá)力強(qiáng)、速度快和模塊化的思想,由伯克利視覺(jué)學(xué)習(xí)中心(BVLC)和社區(qū)貢獻(xiàn)
2018-04-29 16:23:003953 
4月6日消息(美國(guó)硅谷當(dāng)?shù)貢r(shí)間4月5日)今日,在2016年GPU全球技術(shù)大會(huì)(GTC16)上,浪潮開(kāi)源發(fā)布深度學(xué)習(xí)計(jì)算框架Caffe-MPI。同時(shí),浪潮還表示將設(shè)立深度學(xué)習(xí)計(jì)劃,具體從硬件設(shè)施、系統(tǒng)優(yōu)化與并行框架三方面入手。
2018-05-18 18:03:001432 在這篇文章中,我想向大家介紹推動(dòng)深度學(xué)習(xí)發(fā)展的5個(gè)主力框架。這些框架使數(shù)據(jù)科學(xué)家和工程師更容易為復(fù)雜問(wèn)題構(gòu)建深度學(xué)習(xí)解決方案,并執(zhí)行更復(fù)雜的任務(wù)。這只是眾多開(kāi)源框架中的一小部分,由不同的科技巨頭支持,并相互推動(dòng)更快創(chuàng)新。
2018-05-04 10:30:003747 
在本文中文小編將為大家詳細(xì)介紹16種GitHub中最受歡迎的深度學(xué)習(xí)開(kāi)源平臺(tái)和開(kāi)源庫(kù),除此之外,還有些比較不錯(cuò)的平臺(tái)和框架雖然沒(méi)有進(jìn)入榜單,文小編也列了出來(lái),供大家參考。
2018-05-10 12:13:001443 
高仙的SLAM2.0技術(shù)體系核心,是基于多傳感器融合+深度學(xué)習(xí)的架構(gòu),即語(yǔ)義SLAM。高仙SLAM2.0技術(shù)方案以語(yǔ)義分析、機(jī)器學(xué)習(xí)為基礎(chǔ),結(jié)合云端實(shí)時(shí)信息處理以及專為多傳感器融合而開(kāi)發(fā)的專業(yè)算法體系,真正實(shí)現(xiàn)了SLAM在建圖和導(dǎo)航兩個(gè)環(huán)節(jié)的完整應(yīng)用。
2018-05-15 16:48:308535 PLASTER 是一個(gè)與深度學(xué)習(xí)有關(guān)的框架,為致力于開(kāi)發(fā)和部署基于 AI 的服務(wù)的人士提供了全方位指導(dǎo)。本文介紹了每個(gè)框架元素的測(cè)量方式,以幫助您應(yīng)對(duì)諸多 AI 挑戰(zhàn)。
2018-06-22 15:07:123240 MACE,是指小米公司自研的移動(dòng)端深度學(xué)習(xí)框架Mobile AI Compute Engine。2017年12月,這一深度學(xué)習(xí)框架就在小米公司內(nèi)部正式發(fā)布了。
2018-07-26 14:06:463502 MACE,是指小米公司自研的移動(dòng)端深度學(xué)習(xí)框架Mobile AI Compute Engine。2017年12月,這一深度學(xué)習(xí)框架就在小米公司內(nèi)部正式發(fā)布了。
2018-07-26 14:06:464715 開(kāi)源的深度學(xué)習(xí)神經(jīng)網(wǎng)絡(luò)正步入成熟,而現(xiàn)在有許多框架具備為個(gè)性化方案提供先進(jìn)的機(jī)器學(xué)習(xí)和人工智能的能力。
2018-09-21 17:02:536364 該視頻概述了Apache Spark *的BigDL分布式深度學(xué)習(xí)框架。
2018-10-30 06:41:002947 深度學(xué)習(xí)框架正如一家雜貨店,當(dāng)人們想要做一頓美餐的時(shí)候,想必沒(méi)有幾個(gè)人會(huì)親自到菜園里種菜,而是選擇從市場(chǎng)里購(gòu)買食材。
2019-02-12 10:09:439494 Lingvo 是一個(gè) Tensorflow 框架,為協(xié)作式深度學(xué)習(xí)研究提供了一個(gè)完整的解決方案,特別側(cè)重于 sequence-to-sequence 模型。Lingvo 模型由靈活且易于擴(kuò)展的模塊化
2019-02-27 09:28:5010988 
開(kāi)源的深度學(xué)習(xí)神經(jīng)網(wǎng)絡(luò)正步入成熟,而現(xiàn)在有許多框架具備為個(gè)性化方案提供先進(jìn)的機(jī)器學(xué)習(xí)和人工智能的能力。
2019-07-08 10:31:302057 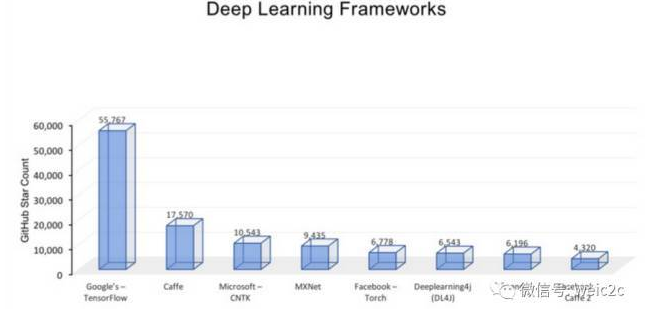
為什么要權(quán)衡這些問(wèn)題其實(shí)不難理解,我們需要保持一致的環(huán)境,避免大型數(shù)據(jù)集跨不同集群之間的傳遞。此外,從現(xiàn)有的基礎(chǔ)設(shè)施中移動(dòng)專有數(shù)據(jù)集也有安全風(fēng)險(xiǎn)與隱患。早期時(shí)解決這些問(wèn)題的方法是在 Spark 上直接加入深度學(xué)習(xí)框架
2019-07-18 14:21:383864 Zebra 可消除深度學(xué)習(xí)推斷中具有挑戰(zhàn)性的編程及 FPGA 任務(wù)。Zebra 可輕松部署和適應(yīng)廣泛的神經(jīng)網(wǎng)絡(luò)及框架。
2019-07-21 10:59:09893 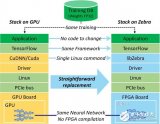
不能確切的得到深度。一方面是由于絕對(duì)深度未知,單目SLAM不能得到機(jī)器人運(yùn)動(dòng)軌跡及地圖的真實(shí)大小,如果把軌跡和房間同時(shí)放大兩倍,單目看到的像是一樣的,因此,單目SLAM只能估計(jì)一個(gè)相對(duì)深度。另一方面
2019-09-11 22:01:351759 FAIR一直是深度學(xué)習(xí)領(lǐng)域研究和開(kāi)源框架的定期貢獻(xiàn)者。從PyTorch到ONNX, FAIR團(tuán)隊(duì)為實(shí)現(xiàn)深度學(xué)習(xí)應(yīng)用程序的簡(jiǎn)化做出了不可思議的貢獻(xiàn)。
2020-03-13 15:23:051503 3月25日下午,曠視科技舉辦線上發(fā)布會(huì),宣布開(kāi)源新一代AI生產(chǎn)力平臺(tái)Brain++的核心深度學(xué)習(xí)框架曠視天元(MegEngine)。
2020-03-25 16:56:202228 3月25日下午,中國(guó)人工智能領(lǐng)軍企業(yè)曠視科技舉辦線上發(fā)布會(huì),正式宣布開(kāi)源新一代AI生產(chǎn)力平臺(tái)Brain++的核心深度學(xué)習(xí)框架曠視天元(MegEngine),成為全球首個(gè)將底層框架開(kāi)源的人工智能企業(yè)。
2020-03-26 11:50:063658 清華大學(xué)計(jì)算機(jī)系胡事民教授研究團(tuán)隊(duì)提出了一個(gè)全新的深度學(xué)習(xí)框架——計(jì)圖(Jittor)。Jittor是一個(gè)采用元算子表達(dá)神經(jīng)網(wǎng)絡(luò)計(jì)算單元、完全基于動(dòng)態(tài)編譯(Just-in-Time)的深度學(xué)習(xí)框架。
2020-03-26 15:50:296456 近年來(lái),開(kāi)發(fā)者社區(qū)中,「開(kāi)源」成了新流行趨勢(shì)。
尤其是深度學(xué)習(xí)框架,自騰訊2017年將ncnn開(kāi)源之后,各大AI實(shí)驗(yàn)室都「慷慨」的將自己的框架開(kāi)源,以實(shí)現(xiàn)較為快速的創(chuàng)新。
2020-07-10 18:37:371116 機(jī)器和深度學(xué)習(xí)的最新進(jìn)展已改進(jìn)了SLAM技術(shù),從而導(dǎo)致地圖的豐富性增加,語(yǔ)義場(chǎng)景理解提高了定位,地圖質(zhì)量和堅(jiān)固性。
2020-08-12 11:35:101143 向往深度學(xué)習(xí)技術(shù),可是深度學(xué)習(xí)框架太難學(xué)怎么辦?百度傾心打造飛槳框架高層 API,零基礎(chǔ)也能輕松上手深度學(xué)習(xí),一起來(lái)看看吧?另:文末有福利,一定要看完呦~ 高層 API,What 深度學(xué)習(xí)
2020-12-02 17:52:522053 最近,天才黑客 George Hotz 開(kāi)源了一個(gè)小型深度學(xué)習(xí)框架 tinygrad,兼具 PyTorch 和 micrograd 的功能。tinygrad 的代碼數(shù)量不到 1000 行,目前該項(xiàng)
2020-12-16 09:36:563883 新一代人工智能技術(shù)的發(fā)展,離不開(kāi)芯片與深度學(xué)習(xí)框架兩大基礎(chǔ),隨著中國(guó)科研創(chuàng)新能力的提升,技術(shù)領(lǐng)域取得大量突破。 當(dāng)然,這也是一種技術(shù)封鎖的倒逼,今年出現(xiàn)的華為芯片供應(yīng)鏈被全面封鎖,和工科神器
2021-01-07 16:04:332897 回顧深度學(xué)習(xí)框架的演變,我們可以清楚地看到深度學(xué)習(xí)框架和深度學(xué)習(xí)算法之間的緊密耦合關(guān)系。這種相互依賴的良性循環(huán)推動(dòng)了深度學(xué)習(xí)框架和工具的快速發(fā)展。
2021-01-08 14:29:594257 回顧深度學(xué)習(xí)框架的演變,我們可以清楚地看到深度學(xué)習(xí)框架和深度學(xué)習(xí)算法之間的緊密耦合關(guān)系。這種相互依賴的良性循環(huán)推動(dòng)了深度學(xué)習(xí)框架和工具的快速發(fā)展。
2021-01-21 13:46:552477 那么,什么是深度學(xué)習(xí)框架呢?它大部分都是由企業(yè)提出來(lái)的,企業(yè)在實(shí)現(xiàn)業(yè)務(wù)的時(shí)候會(huì)寫(xiě)一些深度學(xué)習(xí)算法,最后發(fā)布出去。只要把模型結(jié)構(gòu)搭建起來(lái),你對(duì)它怎么更新,怎么傳播都不用考慮。
2021-03-10 15:11:551639 一般將使用單線雷達(dá)建構(gòu)二維地圖的SLAM算法,稱為2D Lidar SLAM。大家熟知的2D Lidar SLAM算法有:gmapping, hector, karto, cartographer。通常數(shù)據(jù)和運(yùn)動(dòng)都限制在2D平面內(nèi)且運(yùn)動(dòng)平面與激光掃描平面平行。
2021-04-18 10:18:1212157 
世間有一種軟件,名叫“深度學(xué)習(xí)框架”。 在人工智能的江湖,常聽(tīng)人言:得框架者,得天下。 多年以前,一面畫(huà)著大G的大旗在高處飄揚(yáng),美國(guó)谷歌公司的深度學(xué)習(xí)框架占據(jù)大半江山。萬(wàn)萬(wàn)沒(méi)有想到,一場(chǎng)大風(fēng)暴來(lái)了
2021-04-18 11:04:412854 根據(jù)用于獲取物體周圍 3D 信息的傳感方法,SLAM 可以分為兩種主要類型。 一種是 LiDAR(光探測(cè)和測(cè)距),它使用激光測(cè)量距離。 另一種是Visual SLAM,它使用相機(jī)圖像。 視覺(jué)
2021-11-23 18:35:133193 
導(dǎo)讀:近幾年隨著深度學(xué)習(xí)算法的發(fā)展,出現(xiàn)了許多深度學(xué)習(xí)框架。這些框架各有所長(zhǎng),各具特色。常用的開(kāi)源框架有TensorFlow、Keras、Caffe、PyTorch、Theano、CNTK
2022-04-26 18:45:437252 Apache MXNet 是一個(gè)靈活且可擴(kuò)展的深度學(xué)習(xí)框架,支持多種深度學(xué)習(xí)模型、編程語(yǔ)言,并且有一個(gè)開(kāi)發(fā)接口,因其易用性而受到高度重視。
2022-06-17 09:23:211693 PyTorch 是一種開(kāi)源深度學(xué)習(xí)框架,以出色的靈活性和易用性著稱。這在一定程度上是因?yàn)榕c機(jī)器學(xué)習(xí)開(kāi)發(fā)者和數(shù)據(jù)科學(xué)家所青睞的熱門(mén) Python 高級(jí)編程語(yǔ)言兼容。
2022-07-29 10:26:553565 視覺(jué)SLAM是一種基于視覺(jué)傳感器的 SLAM 系統(tǒng),與激光傳感器相比,視覺(jué)傳感器具有成本低、保留環(huán)境語(yǔ)義信息的優(yōu)點(diǎn),能夠與深度學(xué)習(xí)進(jìn)行大量結(jié)合。
2022-11-02 15:02:32747 視覺(jué)SLAM是一種基于視覺(jué)傳感器的 SLAM 系統(tǒng),與激光傳感器相比,視覺(jué)傳感器具有成本低、保留環(huán)境語(yǔ)義信息的優(yōu)點(diǎn),能夠與深度學(xué)習(xí)進(jìn)行大量結(jié)合。
2022-11-29 21:38:37627 SLAM本質(zhì)上是一個(gè)狀態(tài)估計(jì)問(wèn)題,根據(jù)傳感器做劃分,主要是激光、視覺(jué)兩大類。激光SLAM的研究在理論和工程上都比較成熟,現(xiàn)有的很多行業(yè)已經(jīng)開(kāi)始使用激光SLAM完成工業(yè)工作;而視覺(jué)SLAM
2022-12-02 15:00:281149 在 AI 技術(shù)興起后,深度學(xué)習(xí)框架 PyTorch 和 TensorFlow 兩大陣營(yíng)似乎也爆發(fā)了類似的「戰(zhàn)爭(zhēng)」。這兩個(gè)陣營(yíng)背后都有大量的支持者,并且他們都有充足的理由來(lái)說(shuō)明為什么他們所喜歡的框架是最好的。
2023-02-02 10:28:14825 一般將使用單線雷達(dá)建構(gòu)二維地圖的SLAM算法,稱為2D Lidar SLAM。大家熟知的2D Lidar SLAM算法有:gmapping, hector, karto, cartographer。通常數(shù)據(jù)和運(yùn)動(dòng)都限制在2D平面內(nèi)且運(yùn)動(dòng)平面與激光掃描平面平行。
2023-03-27 11:06:561385 深度學(xué)習(xí)可以學(xué)習(xí)視覺(jué)輸入的模式,以預(yù)測(cè)組成圖像的對(duì)象類。用于圖像處理的主要深度學(xué)習(xí)架構(gòu)是卷積神經(jīng)網(wǎng)絡(luò)(CNN),或者是特定的CNN框架,如AlexNet、VGG、Inception和ResNet。計(jì)算機(jī)視覺(jué)的深度學(xué)習(xí)模型通常在專門(mén)的圖形處理單元(GPU)上訓(xùn)練和執(zhí)行,以減少計(jì)算時(shí)間。
2023-05-05 11:35:28729 PyTorch是由Facebook人工智能研究小組開(kāi)發(fā)的一種基于Lua編寫(xiě)的Torch庫(kù)的Python實(shí)現(xiàn)的深度學(xué)習(xí)庫(kù),也是目前使用范圍和體驗(yàn)感最好的一款深度學(xué)習(xí)框架。
2023-05-08 14:20:58774 
深度學(xué)習(xí)框架是用于開(kāi)發(fā)和運(yùn)行人工智能算法的平臺(tái),它為軟件人員開(kāi)發(fā)人工智能提供了模塊化的基礎(chǔ),一般提供數(shù)據(jù)輸人、編寫(xiě)神經(jīng)網(wǎng)絡(luò)模型、訓(xùn)練模型、硬件驅(qū)動(dòng)和部署等多種功能。
2023-05-16 10:07:331316 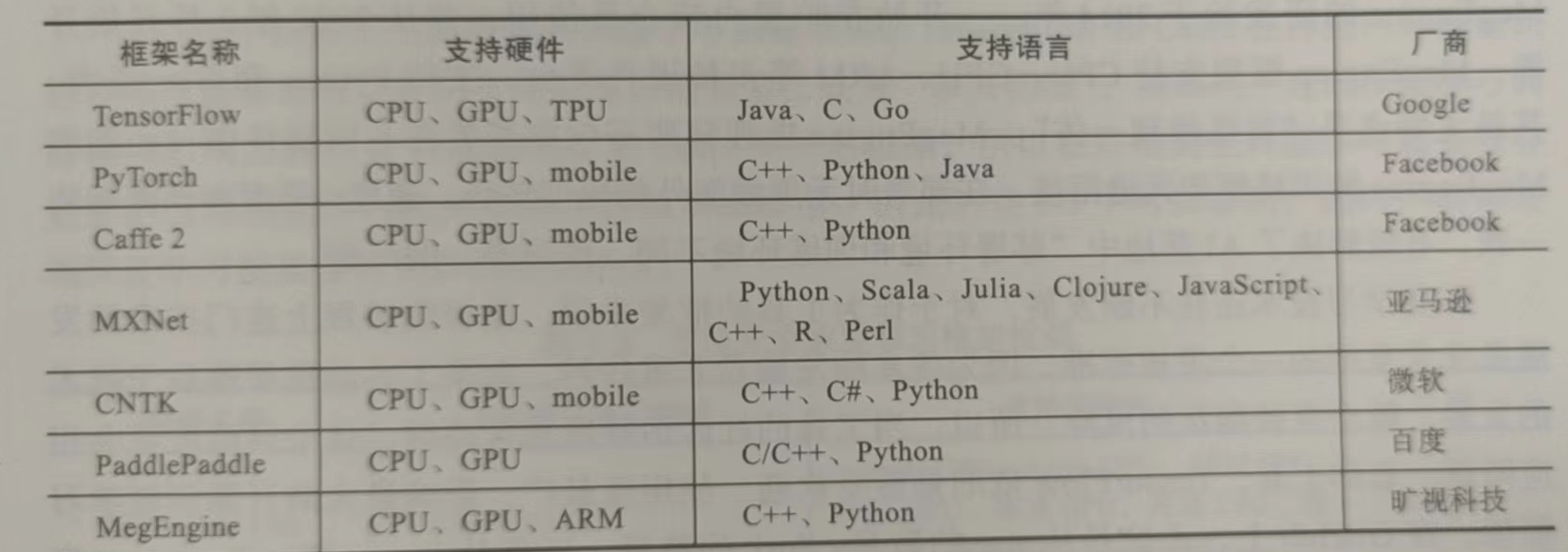
能力也過(guò)硬,一般企業(yè)年薪至少30W起步了。 學(xué)習(xí)SLAM主要需要攻克三大難關(guān): 扎實(shí)的數(shù)學(xué)基礎(chǔ) 對(duì)整個(gè)SLAM大框架及細(xì)節(jié)部分理解到一定深度 比較高度的編程能力 這三點(diǎn)都絕非易事,需要花很大的功夫,中間也有不少?gòu)澛芬摺?對(duì)于初學(xué)者,推薦以下
2023-06-29 15:28:55337 
SLAM至今已歷經(jīng)三十多年的研究,這里給出經(jīng)典視覺(jué)SLAM框架,這個(gè)框架本身及其包含的算法已經(jīng)基本定型,并且已經(jīng)在許多視覺(jué)程序庫(kù)和機(jī)器人程序庫(kù)中提供。
2023-08-10 14:15:53410 
深度學(xué)習(xí)框架pytorch入門(mén)與實(shí)踐 深度學(xué)習(xí)是機(jī)器學(xué)習(xí)中的一個(gè)分支,它使用多層神經(jīng)網(wǎng)絡(luò)對(duì)大量數(shù)據(jù)進(jìn)行學(xué)習(xí),以實(shí)現(xiàn)人工智能的目標(biāo)。在實(shí)現(xiàn)深度學(xué)習(xí)的過(guò)程中,選擇一個(gè)適用的開(kāi)發(fā)框架是非常關(guān)鍵
2023-08-17 16:03:061075 深度學(xué)習(xí)框架是什么?深度學(xué)習(xí)框架有哪些?? 深度學(xué)習(xí)框架是一種軟件工具,它可以幫助開(kāi)發(fā)者輕松快速地構(gòu)建和訓(xùn)練深度神經(jīng)網(wǎng)絡(luò)模型。與手動(dòng)編寫(xiě)代碼相比,深度學(xué)習(xí)框架可以大大減少開(kāi)發(fā)和調(diào)試的時(shí)間和精力,并提
2023-08-17 16:03:091589 深度學(xué)習(xí)框架區(qū)分訓(xùn)練還是推理嗎 深度學(xué)習(xí)框架是一個(gè)非常重要的技術(shù),它們能夠加速深度學(xué)習(xí)的開(kāi)發(fā)與部署過(guò)程。在深度學(xué)習(xí)中,我們通常需要進(jìn)行兩個(gè)關(guān)鍵的任務(wù),即訓(xùn)練和推理。訓(xùn)練是指使用訓(xùn)練數(shù)據(jù)訓(xùn)練神經(jīng)網(wǎng)絡(luò)
2023-08-17 16:03:11906 深度學(xué)習(xí)框架的作用是什么 深度學(xué)習(xí)是一種計(jì)算機(jī)技術(shù),它利用人工神經(jīng)網(wǎng)絡(luò)來(lái)模擬人類的學(xué)習(xí)過(guò)程。由于其高度的精確性和精度,深度學(xué)習(xí)已成為現(xiàn)代計(jì)算機(jī)科學(xué)領(lǐng)域的重要工具。然而,要在深度學(xué)習(xí)中實(shí)現(xiàn)高度復(fù)雜
2023-08-17 16:10:571072 深度學(xué)習(xí)框架pytorch介紹 PyTorch是由Facebook創(chuàng)建的開(kāi)源機(jī)器學(xué)習(xí)框架,其中TensorFlow是完全基于數(shù)據(jù)流圖的。它是一個(gè)使用動(dòng)態(tài)計(jì)算圖的框架,允許用戶更靈活地定義和修改模型
2023-08-17 16:10:59992 深度學(xué)習(xí)框架tensorflow介紹 深度學(xué)習(xí)框架TensorFlow簡(jiǎn)介 深度學(xué)習(xí)框架TensorFlow由Google開(kāi)發(fā),是一個(gè)開(kāi)放源代碼的深度學(xué)習(xí)框架,可用于構(gòu)建人工智能應(yīng)用程序
2023-08-17 16:11:021283 深度學(xué)習(xí)算法的選擇建議 隨著深度學(xué)習(xí)技術(shù)的普及,越來(lái)越多的開(kāi)發(fā)者將它應(yīng)用于各種領(lǐng)域,包括圖像識(shí)別、自然語(yǔ)言處理、聲音識(shí)別等等。對(duì)于剛開(kāi)始學(xué)習(xí)深度學(xué)習(xí)的開(kāi)發(fā)者來(lái)說(shuō),選擇適合自己的算法和框架是非
2023-08-17 16:11:05344 深度學(xué)習(xí)算法庫(kù)框架學(xué)習(xí) 深度學(xué)習(xí)是一種非常強(qiáng)大的機(jī)器學(xué)習(xí)方法,它可以用于許多不同的應(yīng)用程序,例如計(jì)算機(jī)視覺(jué)、語(yǔ)言處理和自然語(yǔ)言處理。然而,實(shí)現(xiàn)深度學(xué)習(xí)技術(shù)需要使用一些算法庫(kù)框架。在本文中,我們將探討
2023-08-17 16:11:07412 深度學(xué)習(xí)框架對(duì)照表? 隨著人工智能技術(shù)的發(fā)展,深度學(xué)習(xí)正在成為當(dāng)今最熱門(mén)的研究領(lǐng)域之一。而深度學(xué)習(xí)框架作為執(zhí)行深度學(xué)習(xí)算法的最重要的工具之一,也隨著深度學(xué)習(xí)的發(fā)展而越來(lái)越成熟。本文將介紹一些常見(jiàn)
2023-08-17 16:11:13458 深度學(xué)習(xí)框架連接技術(shù) 深度學(xué)習(xí)框架是一個(gè)能夠幫助機(jī)器學(xué)習(xí)和人工智能開(kāi)發(fā)人員輕松進(jìn)行模型訓(xùn)練、優(yōu)化及評(píng)估的軟件庫(kù)。深度學(xué)習(xí)框架連接技術(shù)則是需要使用深度學(xué)習(xí)模型的應(yīng)用程序必不可少的技術(shù),通過(guò)連接技術(shù)
2023-08-17 16:11:16443 深度學(xué)習(xí)cntk框架介紹? 深度學(xué)習(xí)是最近幾年來(lái)非常熱門(mén)的話題,它正在徹底改變我們生活和工作的方式。隨著越來(lái)越多的創(chuàng)新和發(fā)展,人工智能和機(jī)器學(xué)習(xí)的應(yīng)用范圍正在大大擴(kuò)展。而對(duì)于深度學(xué)習(xí)這個(gè)領(lǐng)域來(lái)說(shuō)
2023-08-17 16:11:23881 深度學(xué)習(xí)框架和深度學(xué)習(xí)算法教程 深度學(xué)習(xí)是機(jī)器學(xué)習(xí)領(lǐng)域中的一個(gè)重要分支,多年來(lái)深度學(xué)習(xí)一直在各個(gè)領(lǐng)域的應(yīng)用中發(fā)揮著極其重要的作用,成為了人工智能技術(shù)的重要組成部分。許多深度學(xué)習(xí)算法和框架提供
2023-08-17 16:11:26638 近年來(lái),SLAM技術(shù)取得了驚人的發(fā)展,領(lǐng)先一步的激光SLAM已成熟的應(yīng)用于各大場(chǎng)景中,視覺(jué)SLAM雖在落地應(yīng)用上不及激光SLAM,但也是目前研究的一大熱點(diǎn),今天我們就來(lái)詳細(xì)聊聊視覺(jué)SLAM的那些事兒。
2023-09-05 09:31:111389 
Torchvision是基于Pytorch的視覺(jué)深度學(xué)習(xí)遷移學(xué)習(xí)訓(xùn)練框架,當(dāng)前支持的圖像分類、對(duì)象檢測(cè)、實(shí)例分割、語(yǔ)義分割、姿態(tài)評(píng)估模型的遷移學(xué)習(xí)訓(xùn)練與評(píng)估。支持對(duì)數(shù)據(jù)集的合成、變換、增強(qiáng)等,此外還支持預(yù)訓(xùn)練模型庫(kù)下載相關(guān)的模型,直接預(yù)測(cè)推理。
2023-09-22 09:49:51391 
最常見(jiàn)的深度學(xué)習(xí)框架應(yīng)該是TensorFlow、Pytorch、Keras,但是這些框架在面向大規(guī)模模型的時(shí)候都不是很方便。 比如Pytorch的分布式并行計(jì)算框架(Distributed Data
2023-10-30 10:09:45951 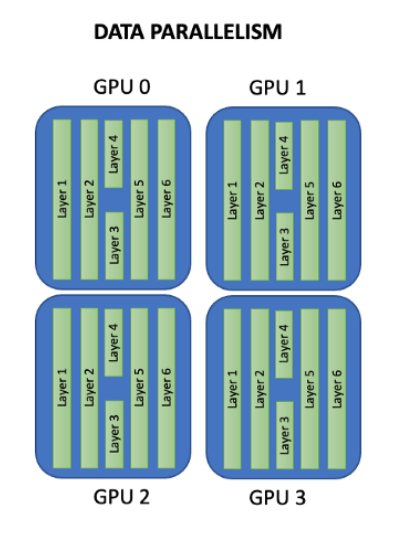
如何利用LiDAR實(shí)現(xiàn)深度感測(cè)
2023-12-06 16:19:57264 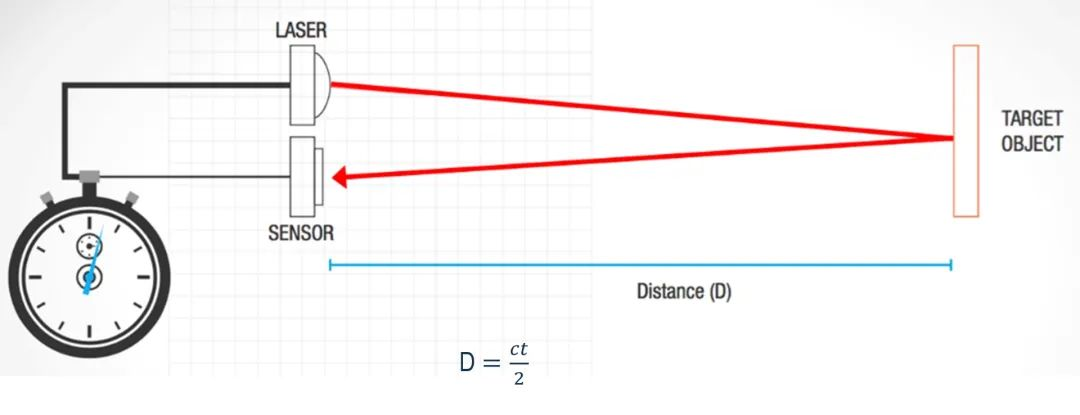
 電子發(fā)燒友App
電子發(fā)燒友App















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論