 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
一、項目概述
1.1 引言
智能移動機器人的誕生給人們的生活帶來了不小的變化,尤其是在工業生產中扮演了非常重要的角色。智能小車,也稱輪式機器人,它是一種集環境感知、決策、自動行駛等功能與一體的綜合系統,并是一種以汽車電子為背景,涵蓋了傳感、信息、通信、人工智能及自動化控制等相關技術,是典型的高新技術綜合體。
1.2 項目背景/選題動機。
智能移動機器人主要體現的就是對物體(障礙物)的感知能力和識別能力,本方案實現尋跡、避障、調速等功能。
二、需求分析
2.1 功能要求
智能移動小車,可以遙控小車左右前后行走,具備尋線和避障功能。
2.2 性能要求
壁障距離20cm范圍內。尋線線寬1cm-5cm。拐彎角度90度-270度。
三、方案設計
3.1 系統功能實現原理(除圖片外需有文字介紹)
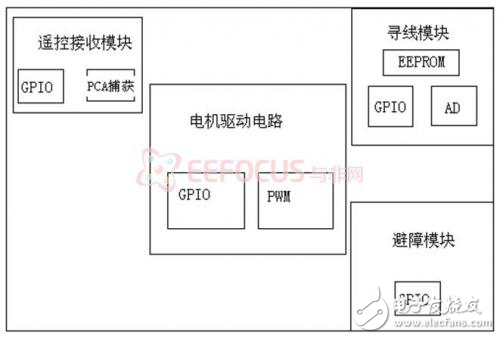
圖1 智能尋線避障小車控制電路資源分配
利用開發板,PSoC技術優勢,利用片上的AD資源,EEPROM,PWM等片內資源。
(1)尋跡部分:以光電傳感技術為基礎,結合CY8C單片機的AD資源,采樣待尋線路徑的背景顏色和路徑的顏色的反色光經光電轉換后的模擬電壓值,通過一定的算法,判斷路徑的位置,根據路徑的位置,確定小車的尋線軌跡。
(2)避障部分:以紅外線反射原理為基礎,通過CY8C單片機實現一定頻率的方波將紅外光進行調制,單片機接受調制后的紅外光,解碼后根據方波數確定在20cm左右的距離內有障礙物,從而確定小車的路徑規劃。
(3)小車速度的控制:采用CY8C單片機的PWM輸出功能,控制電機驅動電路,從而實現調速。
3.2 硬件平臺選用及資源配置
智能尋線壁障小車包括小車本體(車身、輪子、驅動電機)、控制電路板。控制電路板采用CY8CKIT-003開發平臺,外加設計擴展板,主要包括尋線、避障、遙控器解碼、電機驅動4個部分電路。盡量采用CY8C單片機的片內資源,主要包括片上的AD資源,EEPROM,PWM等片內資源。按電路模塊資源分配如圖1所示。
3.3系統軟件架構
軟件包括主模塊和3個功能模塊。功能模塊分別為遙控解碼模塊,避障功能模塊,尋線功能模塊。主模塊根據遙控解碼的條件,調用各功能模塊,
3.4 系統軟件流程(除圖片外需有文字介紹)
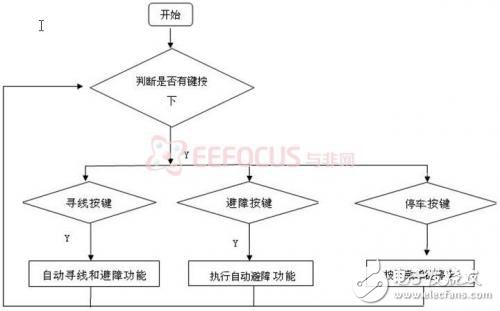
總體流程圖
1.1 引言
智能移動機器人的誕生給人們的生活帶來了不小的變化,尤其是在工業生產中扮演了非常重要的角色。智能小車,也稱輪式機器人,它是一種集環境感知、決策、自動行駛等功能與一體的綜合系統,并是一種以汽車電子為背景,涵蓋了傳感、信息、通信、人工智能及自動化控制等相關技術,是典型的高新技術綜合體。
1.2 項目背景/選題動機。
智能移動機器人主要體現的就是對物體(障礙物)的感知能力和識別能力,本方案實現尋跡、避障、調速等功能。
二、需求分析
2.1 功能要求
智能移動小車,可以遙控小車左右前后行走,具備尋線和避障功能。
2.2 性能要求
壁障距離20cm范圍內。尋線線寬1cm-5cm。拐彎角度90度-270度。
三、方案設計
3.1 系統功能實現原理(除圖片外需有文字介紹)
圖1 智能尋線避障小車控制電路資源分配
利用開發板,PSoC技術優勢,利用片上的AD資源,EEPROM,PWM等片內資源。
(1)尋跡部分:以光電傳感技術為基礎,結合CY8C單片機的AD資源,采樣待尋線路徑的背景顏色和路徑的顏色的反色光經光電轉換后的模擬電壓值,通過一定的算法,判斷路徑的位置,根據路徑的位置,確定小車的尋線軌跡。
(2)避障部分:以紅外線反射原理為基礎,通過CY8C單片機實現一定頻率的方波將紅外光進行調制,單片機接受調制后的紅外光,解碼后根據方波數確定在20cm左右的距離內有障礙物,從而確定小車的路徑規劃。
(3)小車速度的控制:采用CY8C單片機的PWM輸出功能,控制電機驅動電路,從而實現調速。
3.2 硬件平臺選用及資源配置
智能尋線壁障小車包括小車本體(車身、輪子、驅動電機)、控制電路板。控制電路板采用CY8CKIT-003開發平臺,外加設計擴展板,主要包括尋線、避障、遙控器解碼、電機驅動4個部分電路。盡量采用CY8C單片機的片內資源,主要包括片上的AD資源,EEPROM,PWM等片內資源。按電路模塊資源分配如圖1所示。
3.3系統軟件架構
軟件包括主模塊和3個功能模塊。功能模塊分別為遙控解碼模塊,避障功能模塊,尋線功能模塊。主模塊根據遙控解碼的條件,調用各功能模塊,
3.4 系統軟件流程(除圖片外需有文字介紹)
總體流程圖
下載該資料的人也在下載
下載該資料的人還在閱讀
更多 >
- 輪式機器人可以應對新的挑戰和功能
- 單PCB輪式機器人開源分享
- Type-c設計及PD相關軟硬件實現詳解 40次下載
- TI小勇機器人 機場渠道 地鐵渠道 銀行 酒店 服務
- 基于FPGA芯片的軟硬件平臺的使用 20次下載
- 基于DSP的排險機器人車體控制系統 14次下載
- 基于DSP芯片的足球機器人實現與設計 26次下載
- 一種全新的輪式移動機器人軌跡跟蹤控制算法 11次下載
- 如何使用模糊PID的輪式移動機器人進行軌跡控制 35次下載
- 如何進行非完整的約束輪式移動機器人控制系統的設計 4次下載
- 農用輪式機器人運動控制系統 3次下載
- 基于RTX的工業機器人系統設計與實現 10次下載
- 基于MSP430F1232自主移動機器人應用研究 2次下載
- 輪式自動導航機器人的研制 4次下載
- 輪式移動機器人WMR的運動分析 33次下載
- KubeCASH:基于軟硬件融合的容器管理平臺 819次閱讀
- 軟硬件融合的概念和內涵 1118次閱讀
- 微雪電子輪式智能機器人簡介 1222次閱讀
- 輪式機器人可以應對新的挑戰和功能 1364次閱讀
- 機器人教育是什么_機器人教育發展前景 1872次閱讀
- 基于51單片機的自動巡線輪式機器人控制系統 4138次閱讀
- 工業機器人內部系統組成介紹,輪式機器人方案分享 5438次閱讀
- 基于嵌入式的輪式移動機器人設計方案 3611次閱讀
- 基于STM32的家庭服務機器人系統工作原理及設計 1.3w次閱讀
- 基于PC104與C8051F120的水下機器人環境監測系統設計方案 2193次閱讀
- 介紹Facebook在機器學習方面的軟硬件基礎架構,來滿足其全球規模的運算需求 4185次閱讀
- 模擬智能家居的環境下的家庭服務機器人系統的設計 1673次閱讀
- 引導濾波的軟硬件協同加速器設計與實現 1424次閱讀
- Board從入門到精通(五):軟硬件協同設計 2108次閱讀
- 基于FPGA的軟硬件協同仿真加速技術 5077次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 2開關電源基礎知識
- 5.73 MB | 11次下載 | 免費
- 3100W短波放大電路圖
- 0.05 MB | 4次下載 | 3 積分
- 4嵌入式linux-聊天程序設計
- 0.60 MB | 3次下載 | 免費
- 5DIY動手組裝LED電子顯示屏
- 0.98 MB | 3次下載 | 免費
- 6基于FPGA的C8051F單片機開發板設計
- 0.70 MB | 2次下載 | 免費
- 751單片機PM2.5檢測系統程序
- 0.83 MB | 2次下載 | 免費
- 8基于51單片機的RGB調色燈程序仿真
- 0.86 MB | 2次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537797次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191186次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網監
工商網監
評論