 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
實時系統(tǒng)是能夠在確定的時間內(nèi)執(zhí)行計算或處理事務(wù)并對外部事件作出響應(yīng)的計算機系統(tǒng)。對工業(yè)機器人控制來說,實時性是一個相當(dāng)重要的內(nèi)容,尤其是在遠程機器人控制中,如果不能很好地滿足系統(tǒng)所需的實時性要求,就失去了研究的基礎(chǔ)和意義。當(dāng)前專用的實時操作系統(tǒng)很多,但是遺憾的是它們的價格高昂,增加了開發(fā)成本。在考慮實時操作系統(tǒng)核心的性能之外,更應(yīng)該對開發(fā)工具、編譯器、調(diào)試器之類的開發(fā)環(huán)境進行全面考慮,尤其是隨著應(yīng)用的不斷升級,要求實時操作系統(tǒng)支持各類網(wǎng)絡(luò)協(xié)議和編程語言,系統(tǒng)的通用性和可移植性也應(yīng)當(dāng)列入考慮的范圍內(nèi)。于是力求尋找一種高性能的、低價的甚至是免費的實時操作系統(tǒng),且功能必須完備,通用性必須強。RT—Linux與Linux的結(jié)合是一項比較新穎的技術(shù),一方面它提供了面向非實時的POSIX.1的標(biāo)準(zhǔn)功能,另一方面又提供了非常高效的滿足底層硬件設(shè)備的實時性能需要。這種實現(xiàn)方法可以充分利用Linux的強大功能和RT—Linux的實時性能。而且RT—Linux是免費的,完全開放源代碼,可降低開發(fā)成本,適用范圍廣泛。
1 RT-Linux的系統(tǒng)結(jié)構(gòu)
RT-Linux的基本思想就是使Linux運行在實時核心之下,見圖1。RT—Linux是一個可加載的核心模塊。一個小的RT-Linux實時內(nèi)核同原來的Linux內(nèi)核共同控制處理器。實時內(nèi)核直接管理硬件中斷,因此實時內(nèi)核操縱著機器的響應(yīng)時間,原來的Linux就無法影響實時任務(wù)了。在RT- Linux中設(shè)計了兩類中斷。軟中斷是正常的Linux中斷,硬中斷則是真正的實時中斷,執(zhí)行時幾乎沒有任何延遲。實現(xiàn)時,RT-Linux是通過在 Linux核心和中斷處理器之間設(shè)計一個仿真軟件來達到其目的的。
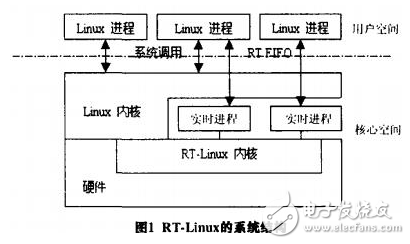
實時中斷不經(jīng)過中斷仿真器,標(biāo)準(zhǔn)Linux的所有硬件中斷首先被中斷仿真器捕獲,所以也根本無法影響實時進程的處理。當(dāng)實時內(nèi)核禁止中斷時,仿真器中的一個標(biāo)志位被置0。當(dāng)有其它非實時中斷產(chǎn)生時,仿真器檢查那個標(biāo)志位,如果為0,說明不允許中斷,否則可以立即執(zhí)~Linux中斷處理程序。筒而言之,Linux不能中斷自身,但是RT-Linux可以中斷Linux,這也就達到了所謂的”RT—Linux的核心可搶占機制”。實時任務(wù)與普通進程之間的通信是通過封鎖,釋放隊列來完成的。具體地說就是當(dāng)有實時任務(wù)要完成時,實時操作系統(tǒng)運行實時內(nèi)核下的任務(wù);當(dāng)沒有實時任務(wù)時,實時內(nèi)核調(diào)度 Linux運行。所以Linux是實時內(nèi)核中優(yōu)先級最低的一個任務(wù)。
- 機器人關(guān)節(jié)伺服控制系統(tǒng)設(shè)計與仿真 38次下載
- 基于EtherCAT等的協(xié)作機器人控制系統(tǒng) 1次下載
- 基于DSP和PC的農(nóng)業(yè)機器人控制系統(tǒng) 17次下載
- 基于DSP的排險機器人車體控制系統(tǒng) 14次下載
- 基于EtherCAT和TwinCAT3的協(xié)作機器人控制系統(tǒng) 14次下載
- 如何實現(xiàn)雙足步行機器人控制系統(tǒng)的開發(fā)與應(yīng)用 27次下載
- 如何實現(xiàn)足球機器人控制系統(tǒng)的研究與設(shè)計 11次下載
- MSP430移動式彈跳機器人控制系統(tǒng)設(shè)計詳析 11次下載
- 基于碼垛機器人控制系統(tǒng)的應(yīng)用設(shè)計 13次下載
- 管道檢測機器人控制系統(tǒng)設(shè)計與運動研究_蔡輝 1次下載
- 全自主移動機器人控制系統(tǒng)研究 0次下載
- 基于DSP的清洗機器人模糊控制系統(tǒng)研究 14次下載
- 基于分布式控制系統(tǒng)的輪式智能機器人研究
- 工業(yè)機器人分布式控制系統(tǒng)實例 112次下載
- 基于AVR的比賽機器人控制系統(tǒng)研究 87次下載
- 機器人控制系統(tǒng)概念與系統(tǒng)特點 5169次閱讀
- 基于RTX51操作系統(tǒng)實現(xiàn)地面移動機器人控制系統(tǒng)的設(shè)計 2890次閱讀
- 基于仿人機器人的多功能通用型控制系統(tǒng)的設(shè)計 2043次閱讀
- 基于PIC單片機和PSC控制器實現(xiàn)機器人控制系統(tǒng)的設(shè)計 3697次閱讀
- 一文了解機器人控制系統(tǒng) 5036次閱讀
- 機器人控制系統(tǒng)的發(fā)展趨勢 5094次閱讀
- 機器人控制系統(tǒng)分類_機器人控制系統(tǒng)有哪些 2.6w次閱讀
- 淺析工業(yè)機器人的控制系統(tǒng) 1783次閱讀
- 移動機器人控制系統(tǒng)設(shè)計與仿真 3433次閱讀
- 機器人控制系統(tǒng)概念!機器人控制系統(tǒng)的基本要求 9598次閱讀
- 機器人控制系統(tǒng)的基本單元與機器人控制系統(tǒng)的特點分析 1w次閱讀
- 機器人的運動控制的介紹和如何將機器人的運動控制分成4種任務(wù) 1w次閱讀
- 基于PLC的機器人伺服運動控制系統(tǒng)設(shè)計詳解 1.5w次閱讀
- 機器人控制系統(tǒng)一文讓你全看懂 7428次閱讀
- 詳細解析工業(yè)機器人控制系統(tǒng) 3.5w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1普中科技HC6800-EM3使用操作手冊
- 21.69 MB | 3次下載 | 2 積分
- 2PCB板EMC/EMI的設(shè)計技巧
- 0.20 MB | 3次下載 | 免費
- 32024PMIC市場洞察
- 2.23 MB | 2次下載 | 免費
- 4MSP430?閃存器件引導(dǎo)加載程序(BSL)
- 1.45MB | 2次下載 | 免費
- 5PL4807單節(jié)鋰離子電池充電器中文手冊
- 1.36 MB | 2次下載 | 免費
- 6LTH7充電電路和鋰電池升壓5V輸出電路原理圖
- 0.04 MB | 1次下載 | 免費
- 7HT2120兩節(jié)鋰電池保護板電路
- 0.22 MB | 1次下載 | 免費
- 8BQ77207EVM用戶指南
- 865.23KB | 1次下載 | 免費
本月
- 1XL4015+LM358恒壓恒流電路圖
- 0.38 MB | 148次下載 | 1 積分
- 2PCB布線和布局電路設(shè)計規(guī)則
- 0.40 MB | 33次下載 | 免費
- 3智能門鎖原理圖
- 0.39 MB | 13次下載 | 免費
- 4GB/T4706.1-2024 家用和類似用途電器的安全第1部分:通用要求
- 7.43 MB | 11次下載 | 1 積分
- 5JESD79-5C_v1.30-2024 內(nèi)存技術(shù)規(guī)范
- 2.71 MB | 10次下載 | 免費
- 6elmo直線電機驅(qū)動調(diào)試細則
- 4.76 MB | 9次下載 | 6 積分
- 7WIFI智能音箱原理圖完整版
- 0.09 MB | 7次下載 | 10 積分
- 8PC1013三合一快充數(shù)據(jù)線充電芯片介紹
- 1.03 MB | 7次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935115次下載 | 10 積分
- 2開源硬件-PMP21529.1-4 開關(guān)降壓/升壓雙向直流/直流轉(zhuǎn)換器 PCB layout 設(shè)計
- 1.48MB | 420061次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233084次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費下載
- 340992 | 191367次下載 | 10 積分
- 5十天學(xué)會AVR單片機與C語言視頻教程 下載
- 158M | 183332次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81581次下載 | 10 積分
- 7Keil工具MDK-Arm免費下載
- 0.02 MB | 73806次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65985次下載 | 10 積分





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論