 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
1、引言
隨著現(xiàn)代高速處理器的迅猛發(fā)展,圖像處理技術(shù)也日益成熟。其中,移動(dòng)目標(biāo)的視頻檢測(cè)與跟蹤是圖像處理、分析應(yīng)用的一個(gè)重要領(lǐng)域,是當(dāng)前相關(guān)領(lǐng)域的研究前沿。移動(dòng)目標(biāo)視頻檢測(cè)與跟蹤技術(shù),在機(jī)器人視覺、交通監(jiān)測(cè)、可視預(yù)警、機(jī)器導(dǎo)航等民用領(lǐng)域有著廣泛的應(yīng)用,同時(shí)在火力攔截、導(dǎo)彈電視和紅外視頻制導(dǎo)等軍用方面也發(fā)揮著重要作用。基于二維轉(zhuǎn)臺(tái)以DSP和FPGA為核心器件構(gòu)成的視頻識(shí)別和跟蹤裝置,可工作于電視圖像或紅外兩個(gè)波段,實(shí)現(xiàn)圖像跟蹤各項(xiàng)功能。本文提出的跟蹤算法與設(shè)計(jì)的跟蹤裝置可在一定程度上解決視頻跟蹤精度低、處理速度慢的問題,同時(shí)本視頻跟蹤裝置也可作為進(jìn)一步研究圖像處理與跟蹤控制的平臺(tái)。
2、視頻跟蹤裝置的硬件設(shè)計(jì)
圖像處理最主要的是實(shí)時(shí)性、可靠性和精確度。針對(duì)圖像處理速度慢的問題,考慮從硬件和和軟件兩方面解決:一是選擇高速的DSP和FPGA為核心器件;二是從平衡圖像處理的實(shí)時(shí)性和效果中選擇最優(yōu)的圖像處理算法。針對(duì)圖像跟蹤可靠性問題,采用雙模式復(fù)合制導(dǎo),由處理器根據(jù)信號(hào)的置信度來選擇跟蹤模式。針對(duì)圖像形心跟蹤算法的精度問題,采取基于去圖像陰影的圖像跟蹤算法。
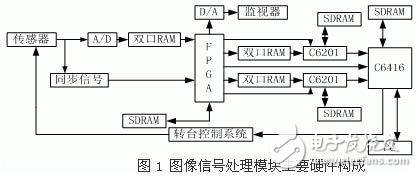
2.1 視頻跟蹤裝置的圖像信號(hào)處理模塊硬件組成
為達(dá)到實(shí)時(shí)處理圖像信號(hào)信息,我們選擇3片高速DSP作為核心處理器。其中用作信息融合的是TMS320C6416,在跟蹤模塊中,使用了兩片相對(duì)價(jià)格低廉一些的TMS320C6201實(shí)現(xiàn)并行圖像跟蹤算法。配合DSP工作的外圍邏輯電路,我們采用xlinix公司的XCV400E型FPGA,同時(shí)實(shí)現(xiàn)部分的圖像預(yù)處理功能。
2.2視頻跟蹤裝置運(yùn)動(dòng)控制模塊的硬件組成
運(yùn)動(dòng)控制模塊硬件由GPT轉(zhuǎn)臺(tái)構(gòu)成。GPT系列轉(zhuǎn)臺(tái)為模擬火炮或雷達(dá)跟蹤系統(tǒng)的旋轉(zhuǎn)運(yùn)動(dòng)系統(tǒng),它包含電控箱、兩維數(shù)控轉(zhuǎn)臺(tái)本體及運(yùn)動(dòng)控制器三大部分。轉(zhuǎn)臺(tái)本體主要由機(jī)械結(jié)構(gòu)件(含PAN和TILT)、驅(qū)動(dòng)用交流伺服電機(jī)(兩套)、諧波減速器、斜齒輪、限位開關(guān)等部分組成。電控箱內(nèi)安裝有交流伺服驅(qū)動(dòng)器、I/O接口板、開關(guān)電源、開關(guān)、指示燈和電氣元件等主要部件。運(yùn)動(dòng)控制器主要由GT-400-SV運(yùn)動(dòng)控制卡、GM-400-SV運(yùn)動(dòng)控制卡用戶接口軟件等部分組成。作為機(jī)電控制系統(tǒng)的核心組成部分,GPT轉(zhuǎn)臺(tái)可用作監(jiān)控設(shè)備的基礎(chǔ)運(yùn)動(dòng)平臺(tái),又可作為研制火箭、導(dǎo)彈、魚雷和衛(wèi)星等高科技尖端武器的仿真和試驗(yàn)平臺(tái)。該系統(tǒng)可實(shí)現(xiàn):定位精度:±0.0069°;重復(fù)精度:±0.00056°;速度:0.01~90°/sec;加速度:90°/sec2;行程:Pan方向?yàn)椤?76°;Tilt方向?yàn)?15°~+50°;負(fù)載:30kg。
3、視頻跟蹤裝置算法的分析
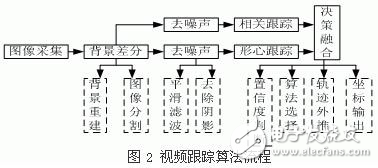
按照處理順序,我們將整個(gè)過程分解為圖2所示。圖像采集模塊:對(duì)視頻圖像進(jìn)行A/D轉(zhuǎn)換,形成原始的256級(jí)灰度圖像,作為待處理的圖像信息。背景差分模塊:重建背景,并完成與當(dāng)前幀的差分。在背景重建時(shí)采用基于最小二乘法的時(shí)域遞推公式來完成,這個(gè)方法只需要一幀圖像的存儲(chǔ),而且可以用遞推實(shí)現(xiàn)。去噪聲模塊:做應(yīng)用鄰域平均法實(shí)現(xiàn)圖像平滑濾波,以及采用顏色濾波法去除陰影等工作。以上算法都是針對(duì)FPGA的特點(diǎn)提出的,將FPGA設(shè)計(jì)成專用運(yùn)算器并實(shí)現(xiàn)算法。
形心跟蹤模塊和相關(guān)跟蹤模塊分別使用的形心投影方法和二維最小絕對(duì)差累加和算法計(jì)算目標(biāo)的位置,融合決策模塊實(shí)現(xiàn)置信度選擇,同時(shí)對(duì)目標(biāo)信號(hào)進(jìn)行擬合和軌跡外推,實(shí)現(xiàn)目標(biāo)在偶然丟失下的預(yù)測(cè)跟蹤,以及深度丟失下的跟蹤狀態(tài)轉(zhuǎn)換和搜索狀態(tài)下控制二維轉(zhuǎn)臺(tái)對(duì)視場(chǎng)的慢速掃搜。這部分針對(duì)DSP的特點(diǎn),采用C語言編程實(shí)現(xiàn)。
隨著現(xiàn)代高速處理器的迅猛發(fā)展,圖像處理技術(shù)也日益成熟。其中,移動(dòng)目標(biāo)的視頻檢測(cè)與跟蹤是圖像處理、分析應(yīng)用的一個(gè)重要領(lǐng)域,是當(dāng)前相關(guān)領(lǐng)域的研究前沿。移動(dòng)目標(biāo)視頻檢測(cè)與跟蹤技術(shù),在機(jī)器人視覺、交通監(jiān)測(cè)、可視預(yù)警、機(jī)器導(dǎo)航等民用領(lǐng)域有著廣泛的應(yīng)用,同時(shí)在火力攔截、導(dǎo)彈電視和紅外視頻制導(dǎo)等軍用方面也發(fā)揮著重要作用。基于二維轉(zhuǎn)臺(tái)以DSP和FPGA為核心器件構(gòu)成的視頻識(shí)別和跟蹤裝置,可工作于電視圖像或紅外兩個(gè)波段,實(shí)現(xiàn)圖像跟蹤各項(xiàng)功能。本文提出的跟蹤算法與設(shè)計(jì)的跟蹤裝置可在一定程度上解決視頻跟蹤精度低、處理速度慢的問題,同時(shí)本視頻跟蹤裝置也可作為進(jìn)一步研究圖像處理與跟蹤控制的平臺(tái)。
2、視頻跟蹤裝置的硬件設(shè)計(jì)
圖像處理最主要的是實(shí)時(shí)性、可靠性和精確度。針對(duì)圖像處理速度慢的問題,考慮從硬件和和軟件兩方面解決:一是選擇高速的DSP和FPGA為核心器件;二是從平衡圖像處理的實(shí)時(shí)性和效果中選擇最優(yōu)的圖像處理算法。針對(duì)圖像跟蹤可靠性問題,采用雙模式復(fù)合制導(dǎo),由處理器根據(jù)信號(hào)的置信度來選擇跟蹤模式。針對(duì)圖像形心跟蹤算法的精度問題,采取基于去圖像陰影的圖像跟蹤算法。
2.1 視頻跟蹤裝置的圖像信號(hào)處理模塊硬件組成
為達(dá)到實(shí)時(shí)處理圖像信號(hào)信息,我們選擇3片高速DSP作為核心處理器。其中用作信息融合的是TMS320C6416,在跟蹤模塊中,使用了兩片相對(duì)價(jià)格低廉一些的TMS320C6201實(shí)現(xiàn)并行圖像跟蹤算法。配合DSP工作的外圍邏輯電路,我們采用xlinix公司的XCV400E型FPGA,同時(shí)實(shí)現(xiàn)部分的圖像預(yù)處理功能。
2.2視頻跟蹤裝置運(yùn)動(dòng)控制模塊的硬件組成
運(yùn)動(dòng)控制模塊硬件由GPT轉(zhuǎn)臺(tái)構(gòu)成。GPT系列轉(zhuǎn)臺(tái)為模擬火炮或雷達(dá)跟蹤系統(tǒng)的旋轉(zhuǎn)運(yùn)動(dòng)系統(tǒng),它包含電控箱、兩維數(shù)控轉(zhuǎn)臺(tái)本體及運(yùn)動(dòng)控制器三大部分。轉(zhuǎn)臺(tái)本體主要由機(jī)械結(jié)構(gòu)件(含PAN和TILT)、驅(qū)動(dòng)用交流伺服電機(jī)(兩套)、諧波減速器、斜齒輪、限位開關(guān)等部分組成。電控箱內(nèi)安裝有交流伺服驅(qū)動(dòng)器、I/O接口板、開關(guān)電源、開關(guān)、指示燈和電氣元件等主要部件。運(yùn)動(dòng)控制器主要由GT-400-SV運(yùn)動(dòng)控制卡、GM-400-SV運(yùn)動(dòng)控制卡用戶接口軟件等部分組成。作為機(jī)電控制系統(tǒng)的核心組成部分,GPT轉(zhuǎn)臺(tái)可用作監(jiān)控設(shè)備的基礎(chǔ)運(yùn)動(dòng)平臺(tái),又可作為研制火箭、導(dǎo)彈、魚雷和衛(wèi)星等高科技尖端武器的仿真和試驗(yàn)平臺(tái)。該系統(tǒng)可實(shí)現(xiàn):定位精度:±0.0069°;重復(fù)精度:±0.00056°;速度:0.01~90°/sec;加速度:90°/sec2;行程:Pan方向?yàn)椤?76°;Tilt方向?yàn)?15°~+50°;負(fù)載:30kg。
3、視頻跟蹤裝置算法的分析
按照處理順序,我們將整個(gè)過程分解為圖2所示。圖像采集模塊:對(duì)視頻圖像進(jìn)行A/D轉(zhuǎn)換,形成原始的256級(jí)灰度圖像,作為待處理的圖像信息。背景差分模塊:重建背景,并完成與當(dāng)前幀的差分。在背景重建時(shí)采用基于最小二乘法的時(shí)域遞推公式來完成,這個(gè)方法只需要一幀圖像的存儲(chǔ),而且可以用遞推實(shí)現(xiàn)。去噪聲模塊:做應(yīng)用鄰域平均法實(shí)現(xiàn)圖像平滑濾波,以及采用顏色濾波法去除陰影等工作。以上算法都是針對(duì)FPGA的特點(diǎn)提出的,將FPGA設(shè)計(jì)成專用運(yùn)算器并實(shí)現(xiàn)算法。
形心跟蹤模塊和相關(guān)跟蹤模塊分別使用的形心投影方法和二維最小絕對(duì)差累加和算法計(jì)算目標(biāo)的位置,融合決策模塊實(shí)現(xiàn)置信度選擇,同時(shí)對(duì)目標(biāo)信號(hào)進(jìn)行擬合和軌跡外推,實(shí)現(xiàn)目標(biāo)在偶然丟失下的預(yù)測(cè)跟蹤,以及深度丟失下的跟蹤狀態(tài)轉(zhuǎn)換和搜索狀態(tài)下控制二維轉(zhuǎn)臺(tái)對(duì)視場(chǎng)的慢速掃搜。這部分針對(duì)DSP的特點(diǎn),采用C語言編程實(shí)現(xiàn)。
下載該資料的人也在下載
下載該資料的人還在閱讀
更多 >
- 小信號(hào)放大電路設(shè)計(jì)方案匯總 139次下載
- AC380V EMC標(biāo)準(zhǔn)電路設(shè)計(jì)方案 50次下載
- AV接口EMC標(biāo)準(zhǔn)電路設(shè)計(jì)方案 29次下載
- CAN總線接口EMC標(biāo)準(zhǔn)電路設(shè)計(jì)方案 206次下載
- 面向工業(yè)4.0的多維視頻監(jiān)控系統(tǒng)設(shè)計(jì)方案 21次下載
- AC220V電源供電穩(wěn)定性裝置的設(shè)計(jì)方案 15次下載
- 基于NVM和DRAN的混合內(nèi)存系統(tǒng)設(shè)計(jì)方案 12次下載
- 基于區(qū)塊鏈的偵查機(jī)器人實(shí)時(shí)避障設(shè)計(jì)方案 10次下載
- 基于FPGA的智能視頻檢索系統(tǒng)設(shè)計(jì)方案 26次下載
- 除塵器緊急泄爆泄壓裝置設(shè)計(jì)方案及特點(diǎn) 2次下載
- 新型基于深度學(xué)習(xí)的目標(biāo)實(shí)時(shí)跟蹤算法 10次下載
- 雙DSP實(shí)時(shí)跟蹤系統(tǒng)設(shè)計(jì)方案 0次下載
- 平安城市視頻監(jiān)控系統(tǒng)設(shè)計(jì)方案 0次下載
- 大型小區(qū)視頻監(jiān)控系統(tǒng)設(shè)計(jì)方案(光端機(jī)傳輸)——模板 0次下載
- 基于多DSP和FPGA的實(shí)時(shí)雙模視頻跟蹤裝置設(shè)計(jì)
- 不同功率的充電樁設(shè)計(jì)方案總結(jié) 2088次閱讀
- 電力變壓器保護(hù)設(shè)計(jì)方案 573次閱讀
- 車輛跟蹤系統(tǒng)可用于實(shí)時(shí)跟蹤的主動(dòng)數(shù)據(jù)傳輸 898次閱讀
- 基于CC2530F256芯片和WiFi協(xié)議棧實(shí)現(xiàn)雙模無線網(wǎng)關(guān)的設(shè)計(jì)方案 4235次閱讀
- 基于編碼器實(shí)現(xiàn)16x16視頻切換矩陣的設(shè)計(jì)方案 3266次閱讀
- 基于IP網(wǎng)絡(luò)的實(shí)時(shí)媒體流傳送方案 2380次閱讀
- 基于MIMO技術(shù)的視頻緩存器設(shè)計(jì)方案 772次閱讀
- 基于FPGA的視頻圖像縮放與疊加融合技術(shù)的設(shè)計(jì)方案及實(shí)現(xiàn) 4524次閱讀
- 基于FPGA的實(shí)時(shí)視頻處理平臺(tái)方案討論及設(shè)計(jì) 3415次閱讀
- 一款新型雙模雙通帶濾波器的設(shè)計(jì)方案 4714次閱讀
- 基于YL-236單片機(jī)實(shí)訓(xùn)裝置的數(shù)字電壓表的設(shè)計(jì)方案 4588次閱讀
- 基于FPGA的無人飛行器溫度巡檢裝置的設(shè)計(jì)方案 1232次閱讀
- 一種新型的雙模雙通帶濾波器的設(shè)計(jì)方案 1526次閱讀
- 一種簡(jiǎn)易的透射式能見度測(cè)量裝置的設(shè)計(jì)方案 2075次閱讀
- 基于協(xié)議的提高RS 485總線實(shí)時(shí)性的設(shè)計(jì)方案 2188次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1電子電路原理第七版PDF電子教材免費(fèi)下載
- 0.00 MB | 1489次下載 | 免費(fèi)
- 2單片機(jī)典型實(shí)例介紹
- 18.19 MB | 91次下載 | 1 積分
- 3S7-200PLC編程實(shí)例詳細(xì)資料
- 1.17 MB | 27次下載 | 1 積分
- 4筆記本電腦主板的元件識(shí)別和講解說明
- 4.28 MB | 18次下載 | 4 積分
- 5開關(guān)電源原理及各功能電路詳解
- 0.38 MB | 9次下載 | 免費(fèi)
- 6基于AT89C2051/4051單片機(jī)編程器的實(shí)驗(yàn)
- 0.11 MB | 4次下載 | 免費(fèi)
- 7基于單片機(jī)和 SG3525的程控開關(guān)電源設(shè)計(jì)
- 0.23 MB | 3次下載 | 免費(fèi)
- 8基于單片機(jī)的紅外風(fēng)扇遙控
- 0.23 MB | 3次下載 | 免費(fèi)
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234313次下載 | 免費(fèi)
- 2PADS 9.0 2009最新版 -下載
- 0.00 MB | 66304次下載 | 免費(fèi)
- 3protel99下載protel99軟件下載(中文版)
- 0.00 MB | 51209次下載 | 免費(fèi)
- 4LabView 8.0 專業(yè)版下載 (3CD完整版)
- 0.00 MB | 51043次下載 | 免費(fèi)
- 5555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33562次下載 | 免費(fèi)
- 6接口電路圖大全
- 未知 | 30319次下載 | 免費(fèi)
- 7Multisim 10下載Multisim 10 中文版
- 0.00 MB | 28588次下載 | 免費(fèi)
- 8開關(guān)電源設(shè)計(jì)實(shí)例指南
- 未知 | 21539次下載 | 免費(fèi)
總榜
- 1matlab軟件下載入口
- 未知 | 935053次下載 | 免費(fèi)
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537791次下載 | 免費(fèi)
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420026次下載 | 免費(fèi)
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234313次下載 | 免費(fèi)
- 5Altium DXP2002下載入口
- 未知 | 233045次下載 | 免費(fèi)
- 6電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191183次下載 | 免費(fèi)
- 7十天學(xué)會(huì)AVR單片機(jī)與C語言視頻教程 下載
- 158M | 183277次下載 | 免費(fèi)
- 8proe5.0野火版下載(中文版免費(fèi)下載)
- 未知 | 138039次下載 | 免費(fèi)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論