 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
基于MCU和DSP的運動控制系統(tǒng)由于結(jié)構(gòu)緊湊、環(huán)境適應(yīng)性好而有良好的發(fā)展前景。由于PC機與MCU和DSP資源環(huán)境差異較大, 進(jìn)行MCU和DSP環(huán)境中的運動控制技術(shù)研究十分必要。
基于MCU和DSP的運動控制研究硬件平臺設(shè)計遵從運動控制系統(tǒng)的開放式、可重構(gòu)和網(wǎng)絡(luò)化的發(fā)展方向, 選用主流的MCU及DSP芯片S3C2410A和TMS320F2812, 適應(yīng)信息網(wǎng)、控制網(wǎng)和伺服網(wǎng)(接口) 網(wǎng)絡(luò)化需求, 采用雙層、組合式模式, 實現(xiàn)了一個實用可靠的硬件環(huán)境。它可以進(jìn)行單CPU、并行雙CPU和層次化多CPU的運動控制算法和系統(tǒng)支撐軟件的研究。
引言
開放式控制器體系結(jié)構(gòu)源于“開放式”的PC(個人計算機) 技術(shù), 目前的開放式運動控制器多為PC+運動控制卡結(jié)構(gòu), 隨著MCU(微控制器) 和DSP(數(shù)字信號處理器)性能的增強, MUC和DSP取代PC的趨勢日趨明顯, 而這種嵌入式的緊湊結(jié)構(gòu)較PC有更廣泛的環(huán)境適應(yīng)性。MCU、DSP和PC差異較大, PC環(huán)境中的運動控制技術(shù)不可能直接向MCU和DSP系統(tǒng)中轉(zhuǎn)移, 基于MCU和DSP硬件平臺的運動控制技術(shù)的研究十分必要。
設(shè)計目標(biāo)與需求分析
運動控制系統(tǒng)發(fā)展方向
在開放式控制器技術(shù)的推動下, 運動控制系統(tǒng)由傳統(tǒng)的封閉式結(jié)構(gòu)朝著開放、可重構(gòu)、網(wǎng)絡(luò)化方向發(fā)展。按照《開放式數(shù)控系統(tǒng)第1 部分: 總則》(GB/T18759.1- 2002) 的定義, 開放式數(shù)控系統(tǒng)有三個層次的開放, 第一層, 系統(tǒng)功能可配置, 人機界面、伺服驅(qū)動單元的運動控制接口、邏輯控制單元接口均開放; 第二層, 系統(tǒng)軟件體系結(jié)構(gòu)、拓?fù)浣Y(jié)構(gòu)和應(yīng)用軟件接口開放, 第三方的應(yīng)用軟件能在系統(tǒng)中安裝運行并實現(xiàn)互操作性, 且第三方的軟件模塊可以在拓?fù)浣Y(jié)構(gòu)不變的情況下對本系統(tǒng)軟件模塊置換和擴(kuò)展; 第三層, 系統(tǒng)實現(xiàn)可重構(gòu)。國標(biāo)GB/T 18759.1- 2002 尚未公布可重構(gòu)的詳細(xì)內(nèi)容。運動控制系統(tǒng)是數(shù)控系統(tǒng)的一個核心組件, 其技術(shù)發(fā)展方向和開放式數(shù)控系統(tǒng)類似。現(xiàn)代運動控制器聯(lián)通信息網(wǎng)、邏輯控制網(wǎng)和伺服控制網(wǎng)(接口) 三種網(wǎng)絡(luò)。
在MCU 和DSP 環(huán)境中運動控制技術(shù)的研究課題
和PC相比, MCU和DSP采用了哈佛結(jié)構(gòu), 流水線技術(shù), 超長指令字, 加乘器等提高CPU速度, 并在片上擴(kuò)展了控制用前向和后向通道外設(shè)及通信接口, 在這種環(huán)境下, 實現(xiàn)開放、可重構(gòu)和網(wǎng)絡(luò)化運動控制功能, 下列研究是必要的:
①體系結(jié)構(gòu)的研究, 以多CPU方式實現(xiàn)復(fù)雜的運動控制;
②嵌入式系統(tǒng)中實時操作系統(tǒng)的研究, 解決MCU和DSP控制器系統(tǒng)軟件問題;
③MCU和DSP環(huán)境中運動控制算法的研究, 解決少資源情況下, 復(fù)雜控制算法的實現(xiàn)問題;
④軟件模塊管理與剪裁技術(shù)的研究, 解決通用技術(shù)方案的應(yīng)用針對性問題;
⑤網(wǎng)絡(luò)通信技術(shù)的研究:解決伺服通信網(wǎng)、邏輯控制網(wǎng)和信息網(wǎng)通信問題。
硬件系統(tǒng)設(shè)計目標(biāo)與結(jié)構(gòu)要求
基于MCU和DSP的運動控制技術(shù)研究硬件平臺的設(shè)計目標(biāo)是為上述研究課題提供硬件系統(tǒng)環(huán)境, 以MCU或DSP為核心的商品化運動控制器并不少見,但它們只對用戶提供運動控制函數(shù)庫的接口, 并不是完全意義上的開放, 必須開發(fā)運動控制器的硬件研究平臺, 并滿足下列要求:
①類型與結(jié)構(gòu)化模式要求:CPU選型應(yīng)是主流的MCU和DSP芯片,結(jié)構(gòu)體系采用單CPU,雙CPU流水線模式和層次化結(jié)構(gòu), CPU可以獨立工作, 可以組成流水線模式工作。也可以采用兩層結(jié)構(gòu),上下層分別處理不同實時要求的任務(wù)。
②開放性要求:各CPU單元配置計算機通信接口, 如RS232、PCI、CAN、USB 等, 可以方便地實現(xiàn)硬件互聯(lián)。
③網(wǎng)絡(luò)化要求:配有伺服單元接口、現(xiàn)場總線接口和以太網(wǎng)接口。
系統(tǒng)設(shè)計
運動控制系統(tǒng)硬件結(jié)構(gòu)
運動控制系統(tǒng)硬件基本結(jié)構(gòu)如圖1 所示:
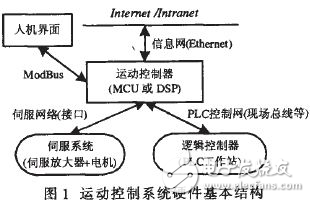
基于MCU和DSP的運動控制研究硬件平臺設(shè)計遵從運動控制系統(tǒng)的開放式、可重構(gòu)和網(wǎng)絡(luò)化的發(fā)展方向, 選用主流的MCU及DSP芯片S3C2410A和TMS320F2812, 適應(yīng)信息網(wǎng)、控制網(wǎng)和伺服網(wǎng)(接口) 網(wǎng)絡(luò)化需求, 采用雙層、組合式模式, 實現(xiàn)了一個實用可靠的硬件環(huán)境。它可以進(jìn)行單CPU、并行雙CPU和層次化多CPU的運動控制算法和系統(tǒng)支撐軟件的研究。
引言
開放式控制器體系結(jié)構(gòu)源于“開放式”的PC(個人計算機) 技術(shù), 目前的開放式運動控制器多為PC+運動控制卡結(jié)構(gòu), 隨著MCU(微控制器) 和DSP(數(shù)字信號處理器)性能的增強, MUC和DSP取代PC的趨勢日趨明顯, 而這種嵌入式的緊湊結(jié)構(gòu)較PC有更廣泛的環(huán)境適應(yīng)性。MCU、DSP和PC差異較大, PC環(huán)境中的運動控制技術(shù)不可能直接向MCU和DSP系統(tǒng)中轉(zhuǎn)移, 基于MCU和DSP硬件平臺的運動控制技術(shù)的研究十分必要。
設(shè)計目標(biāo)與需求分析
運動控制系統(tǒng)發(fā)展方向
在開放式控制器技術(shù)的推動下, 運動控制系統(tǒng)由傳統(tǒng)的封閉式結(jié)構(gòu)朝著開放、可重構(gòu)、網(wǎng)絡(luò)化方向發(fā)展。按照《開放式數(shù)控系統(tǒng)第1 部分: 總則》(GB/T18759.1- 2002) 的定義, 開放式數(shù)控系統(tǒng)有三個層次的開放, 第一層, 系統(tǒng)功能可配置, 人機界面、伺服驅(qū)動單元的運動控制接口、邏輯控制單元接口均開放; 第二層, 系統(tǒng)軟件體系結(jié)構(gòu)、拓?fù)浣Y(jié)構(gòu)和應(yīng)用軟件接口開放, 第三方的應(yīng)用軟件能在系統(tǒng)中安裝運行并實現(xiàn)互操作性, 且第三方的軟件模塊可以在拓?fù)浣Y(jié)構(gòu)不變的情況下對本系統(tǒng)軟件模塊置換和擴(kuò)展; 第三層, 系統(tǒng)實現(xiàn)可重構(gòu)。國標(biāo)GB/T 18759.1- 2002 尚未公布可重構(gòu)的詳細(xì)內(nèi)容。運動控制系統(tǒng)是數(shù)控系統(tǒng)的一個核心組件, 其技術(shù)發(fā)展方向和開放式數(shù)控系統(tǒng)類似。現(xiàn)代運動控制器聯(lián)通信息網(wǎng)、邏輯控制網(wǎng)和伺服控制網(wǎng)(接口) 三種網(wǎng)絡(luò)。
在MCU 和DSP 環(huán)境中運動控制技術(shù)的研究課題
和PC相比, MCU和DSP采用了哈佛結(jié)構(gòu), 流水線技術(shù), 超長指令字, 加乘器等提高CPU速度, 并在片上擴(kuò)展了控制用前向和后向通道外設(shè)及通信接口, 在這種環(huán)境下, 實現(xiàn)開放、可重構(gòu)和網(wǎng)絡(luò)化運動控制功能, 下列研究是必要的:
①體系結(jié)構(gòu)的研究, 以多CPU方式實現(xiàn)復(fù)雜的運動控制;
②嵌入式系統(tǒng)中實時操作系統(tǒng)的研究, 解決MCU和DSP控制器系統(tǒng)軟件問題;
③MCU和DSP環(huán)境中運動控制算法的研究, 解決少資源情況下, 復(fù)雜控制算法的實現(xiàn)問題;
④軟件模塊管理與剪裁技術(shù)的研究, 解決通用技術(shù)方案的應(yīng)用針對性問題;
⑤網(wǎng)絡(luò)通信技術(shù)的研究:解決伺服通信網(wǎng)、邏輯控制網(wǎng)和信息網(wǎng)通信問題。
硬件系統(tǒng)設(shè)計目標(biāo)與結(jié)構(gòu)要求
基于MCU和DSP的運動控制技術(shù)研究硬件平臺的設(shè)計目標(biāo)是為上述研究課題提供硬件系統(tǒng)環(huán)境, 以MCU或DSP為核心的商品化運動控制器并不少見,但它們只對用戶提供運動控制函數(shù)庫的接口, 并不是完全意義上的開放, 必須開發(fā)運動控制器的硬件研究平臺, 并滿足下列要求:
①類型與結(jié)構(gòu)化模式要求:CPU選型應(yīng)是主流的MCU和DSP芯片,結(jié)構(gòu)體系采用單CPU,雙CPU流水線模式和層次化結(jié)構(gòu), CPU可以獨立工作, 可以組成流水線模式工作。也可以采用兩層結(jié)構(gòu),上下層分別處理不同實時要求的任務(wù)。
②開放性要求:各CPU單元配置計算機通信接口, 如RS232、PCI、CAN、USB 等, 可以方便地實現(xiàn)硬件互聯(lián)。
③網(wǎng)絡(luò)化要求:配有伺服單元接口、現(xiàn)場總線接口和以太網(wǎng)接口。
系統(tǒng)設(shè)計
運動控制系統(tǒng)硬件結(jié)構(gòu)
運動控制系統(tǒng)硬件基本結(jié)構(gòu)如圖1 所示:
下載該資料的人也在下載
下載該資料的人還在閱讀
更多 >
- 基于MATLAB的DSP控制系統(tǒng)仿真平臺設(shè)計方案 20次下載
- 如何使用DSP和CPLD進(jìn)行運動控制器的設(shè)計與應(yīng)用資料說明 8次下載
- 基于DSP的運動控制器的探究 2次下載
- MCU+DSP嵌入式平臺的i機接口設(shè)計 0次下載
- DSP的運動控制系統(tǒng)設(shè)計 12次下載
- MCU和DSP的運動控制研究硬件平臺設(shè)計 6次下載
- 基于DSP與FPGA的運動控制器設(shè)計 30次下載
- 基于DSP的永磁平面電機運動控制系統(tǒng)研究 18次下載
- 基于DSP的多軸運動控制器的研究與設(shè)計 6次下載
- 基于DSP與FPGA的運動控制器研究 93次下載
- 基于DSP的自由曲線加工運動控制系統(tǒng)的研究 49次下載
- 基于DSP的運動控制系統(tǒng)設(shè)計
- 基于MCU和DSP的運動控制研究硬件平臺設(shè)計
- 基于DSP的運動控制器的研究與開發(fā)
- 基于DSP的無線運動控制方法
- MCU、DSP和FPGA的區(qū)別 4091次閱讀
- 全國產(chǎn)EtherCAT運動控制邊緣控制器(五):IO配置與回零運動的Python+Qt開發(fā) 737次閱讀
- 全國產(chǎn)EtherCAT運動控制邊緣控制器-ZMC432H 670次閱讀
- 采用ACRl505型運動控制卡實現(xiàn)機械自動封裝系統(tǒng)的設(shè)計 891次閱讀
- 采用ADT850運動控制卡和PC機實現(xiàn)多軸運動控制系統(tǒng)的設(shè)計 2523次閱讀
- MIPS平臺上運動控制器的調(diào)度抖動的測試方法設(shè)計詳解 1199次閱讀
- 簡介pmac運動控制卡 1.3w次閱讀
- MCU市場更加豐富多元,DSP/FPU不同硬件加速單元具互補作用 1737次閱讀
- 基于ARM與DSP的嵌入式運動控制器設(shè)計詳解 7265次閱讀
- 基于CPLD的開放式四軸運動控制器的硬件、軟件設(shè)計 1959次閱讀
- 智能硬件平臺有哪些_智能硬件平臺哪個最好 1.4w次閱讀
- 中穎單片機雙核(DSP和MCU)SH99F100基于工業(yè)控制中的應(yīng)用 1870次閱讀
- 基于DSP的運動相機控制系統(tǒng)設(shè)計 1496次閱讀
- 基于CPLD/DSP的賽車全電防滑剎車控制器設(shè)計 1295次閱讀
- 基于DSP的覆冰機器人控制系統(tǒng)研究 603次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1電子電路原理第七版PDF電子教材免費下載
- 0.00 MB | 1489次下載 | 免費
- 2單片機典型實例介紹
- 18.19 MB | 91次下載 | 1 積分
- 3S7-200PLC編程實例詳細(xì)資料
- 1.17 MB | 27次下載 | 1 積分
- 4筆記本電腦主板的元件識別和講解說明
- 4.28 MB | 18次下載 | 4 積分
- 5開關(guān)電源原理及各功能電路詳解
- 0.38 MB | 9次下載 | 免費
- 6基于AT89C2051/4051單片機編程器的實驗
- 0.11 MB | 4次下載 | 免費
- 7基于單片機和 SG3525的程控開關(guān)電源設(shè)計
- 0.23 MB | 3次下載 | 免費
- 8基于單片機的紅外風(fēng)扇遙控
- 0.23 MB | 3次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234313次下載 | 免費
- 2PADS 9.0 2009最新版 -下載
- 0.00 MB | 66304次下載 | 免費
- 3protel99下載protel99軟件下載(中文版)
- 0.00 MB | 51209次下載 | 免費
- 4LabView 8.0 專業(yè)版下載 (3CD完整版)
- 0.00 MB | 51043次下載 | 免費
- 5555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33562次下載 | 免費
- 6接口電路圖大全
- 未知 | 30319次下載 | 免費
- 7Multisim 10下載Multisim 10 中文版
- 0.00 MB | 28588次下載 | 免費
- 8開關(guān)電源設(shè)計實例指南
- 未知 | 21539次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935053次下載 | 免費
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537791次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420026次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234313次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233045次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191183次下載 | 免費
- 7十天學(xué)會AVR單片機與C語言視頻教程 下載
- 158M | 183277次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138039次下載 | 免費





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論