 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
電子控制空氣懸架(ECAS)以電子控制模塊為控制核心,對空氣懸架參數進行實時控制,能自動控制車輛懸架的剛度、阻尼系數及車身高度等參數;汽車在各種路面、各種工況條件下能實現主動調節、主動控制,并增加了許多輔助功能(如故障診斷功能等);可最大限度地提高汽車的行駛平順性和操縱穩定性,可滿足現代汽車對乘坐舒適性、行駛安全性的更高要求。目前在歐洲一些國家的大型客車中已經大量應用。我國在20世紀50年代就對空氣彈簧進行了研究,但是許多研究成果的產業轉化率非常低,導致許多有價值的研究沒能繼續堅持和深入下去,使我國汽車懸架技術的研究和應用與歐美等發達國家相比明顯落后。目前在國內還沒有汽車公司能夠獨立設計出并向市場提供比較成熟的空氣懸架電子控制單元[1]。因此,研究空氣懸架電子控制單元,盡快縮小與國外在電控空氣懸架系統應用方面的差距,具有非常現實的意義。
本文以YBL6891H型客車為控制對象。該客車原本以車身高度為主要控制目標,當載荷改變時,車身高度維持在某一范圍內不變,沒有真正地涉及到對客車行駛平順性的改善。本文以該客車的1/4車輛模型為基礎,采用模糊PID控制算法調節空氣彈簧的剛度,以降低車身垂直加速度為主要目標,從而實現對客車行駛平順性的改善。采用Freescale公司的MC9S08GB60A單片機為控制芯片,設計了電子控制單元。
1 系統硬件設計方案
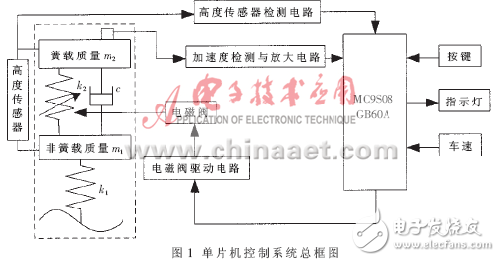
系統的總體結構如圖1所示。圖中的虛線部分是兩自由度1/4車輛模型,控制系統的MCU采用了Freescale半導體公司的MC9S08GB60A,該處理器可靠性高、抗干擾能力強,被廣泛應用于汽車電子產品。總體電路結構由ECU、高度傳感器、速度傳感器、加速度傳感器及其檢測電路、鍵盤(用于模式選擇以及手動模式下的控制)、指示燈等電路組成。加速度傳感器檢測到的垂直加速度信號傳遞給單片機,單片機產生控制信號,通過電磁閥控制空氣彈簧的剛度。剛度的調整通過對主附氣室之間的控制閥的控制來實現。高度傳感器不斷地將客車的高度信號傳遞給單片機,而加速度的大小在一定程度上反映了路況信息,單片機根據當前的路況和車速,調整車身高度。一旦車身高度達到設定的最低或最高位置限值時,ECU將執行保護,自動結束調節。
1.1高度信號采集處理電路
高度檢測電路的工作原理為:車身高度-傳感器轉角-電感-脈沖信號周期。車身高度傳感器等效為一個可變電感與一個電阻串聯。車身上下振動時,帶動擺桿上下轉動,從而移動鐵心,使電感值不斷變化。當車身上升時,擺桿向上轉動,感應值變大,當車身下降時,擺桿向下轉動,感應值變小。圖2為高度檢測電路,高度傳感器的兩個端子分別接height1i和HCOM端。檢測電路的輸出為一串脈沖信號。用multisim10[2]對傳感器檢測電路進行了仿真,結果如圖3所示,圖3(a)、圖3(b)、圖3(c)為高度傳感器的電感值分別為13mH、20mH、30mH時的高度信號。可見車身高度改變時,電感值也改變,而電感值的改變導致脈沖寬度的變化,因此單片機可根據脈沖的寬度獲取車身高度信息。
本文以YBL6891H型客車為控制對象。該客車原本以車身高度為主要控制目標,當載荷改變時,車身高度維持在某一范圍內不變,沒有真正地涉及到對客車行駛平順性的改善。本文以該客車的1/4車輛模型為基礎,采用模糊PID控制算法調節空氣彈簧的剛度,以降低車身垂直加速度為主要目標,從而實現對客車行駛平順性的改善。采用Freescale公司的MC9S08GB60A單片機為控制芯片,設計了電子控制單元。
1 系統硬件設計方案
系統的總體結構如圖1所示。圖中的虛線部分是兩自由度1/4車輛模型,控制系統的MCU采用了Freescale半導體公司的MC9S08GB60A,該處理器可靠性高、抗干擾能力強,被廣泛應用于汽車電子產品。總體電路結構由ECU、高度傳感器、速度傳感器、加速度傳感器及其檢測電路、鍵盤(用于模式選擇以及手動模式下的控制)、指示燈等電路組成。加速度傳感器檢測到的垂直加速度信號傳遞給單片機,單片機產生控制信號,通過電磁閥控制空氣彈簧的剛度。剛度的調整通過對主附氣室之間的控制閥的控制來實現。高度傳感器不斷地將客車的高度信號傳遞給單片機,而加速度的大小在一定程度上反映了路況信息,單片機根據當前的路況和車速,調整車身高度。一旦車身高度達到設定的最低或最高位置限值時,ECU將執行保護,自動結束調節。
1.1高度信號采集處理電路
高度檢測電路的工作原理為:車身高度-傳感器轉角-電感-脈沖信號周期。車身高度傳感器等效為一個可變電感與一個電阻串聯。車身上下振動時,帶動擺桿上下轉動,從而移動鐵心,使電感值不斷變化。當車身上升時,擺桿向上轉動,感應值變大,當車身下降時,擺桿向下轉動,感應值變小。圖2為高度檢測電路,高度傳感器的兩個端子分別接height1i和HCOM端。檢測電路的輸出為一串脈沖信號。用multisim10[2]對傳感器檢測電路進行了仿真,結果如圖3所示,圖3(a)、圖3(b)、圖3(c)為高度傳感器的電感值分別為13mH、20mH、30mH時的高度信號。可見車身高度改變時,電感值也改變,而電感值的改變導致脈沖寬度的變化,因此單片機可根據脈沖的寬度獲取車身高度信息。
下載該資料的人也在下載
下載該資料的人還在閱讀
更多 >
- 汽車電子控制懸架系統的解析 18次下載
- 基于模糊理論與常規PID控制的模糊PID控制方法研究_趙笑笑 9次下載
- 模糊PID控制 24次下載
- 基于模糊PID控制的導彈舵機伺服控制器 45次下載
- 基于模糊-PID復合控制算法的電機轉速控制 27次下載
- 基于模糊PID的超聲電機控制 20次下載
- 模糊PID控制及其MATLAB仿真 0次下載
- 機載光電跟蹤系統的模糊PID控制
- 車輛懸架Fuzzy-PID控制器設計方案 24次下載
- 基于PlD控制的電控空氣懸架系統設計
- 專家PID控制和模糊PID控制
- 氣動柔性球關節的模糊PID控制
- 電子控制空氣懸架系統在城市客車上的應用
- 模糊控制和傳統PID 控制的仿真研究
- 簡化的模糊PID控制器研究
- PID控制的原理與作用 1361次閱讀
- 什么是pid控制,其控制作用是什么 1914次閱讀
- 汽車電子空氣懸架的原理 659次閱讀
- 飛行控制PID算法的作用解析 1405次閱讀
- 通過采用參數模糊自整定PID控制器提高儀器溫度控制系統的性能 5090次閱讀
- 什么是PID控制? 3.1w次閱讀
- pid控制器工作原理 1w次閱讀
- 一種利用模糊PID算法的嬰兒培養箱溫度控制系統設計剖析 1257次閱讀
- 過程控制中的PID控制技術 8071次閱讀
- pid控制器的輸入輸出_PID控制器的控制實現 2.7w次閱讀
- 基于模糊控制算法的智能車轉向舵機控制 1.1w次閱讀
- 一種單神經元模糊PID控制方法 8162次閱讀
- 汽車可控電子懸架系統設計 ECAS 的組成及原理 1.8w次閱讀
- 基于MatIab的模糊PID控制系統設計及仿真 1.7w次閱讀
- 基于帶修正因子模糊PID控制的PMSM交流伺服系統 1987次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 2開關電源基礎知識
- 5.73 MB | 6次下載 | 免費
- 3100W短波放大電路圖
- 0.05 MB | 4次下載 | 3 積分
- 4嵌入式linux-聊天程序設計
- 0.60 MB | 3次下載 | 免費
- 5基于FPGA的光纖通信系統的設計與實現
- 0.61 MB | 2次下載 | 免費
- 651單片機窗簾控制器仿真程序
- 1.93 MB | 2次下載 | 免費
- 751單片機大棚環境控制器仿真程序
- 1.10 MB | 2次下載 | 免費
- 8基于51單片機的RGB調色燈程序仿真
- 0.86 MB | 2次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33564次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6653次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537796次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420026次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191185次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網監
工商網監
評論