 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
在上一次的靈動微課堂中和大家分享過MM32F013x-UART 9bit通信實例,本次微課堂在此實例的基礎上實現UART多處理器通信。MM32F013x系列MCU支持UART多處理器通信,其工作原理是主從機設備采用復用漏極開路,主從機外部接上拉電阻,在空閑時使從機處于靜默模式,主機要控制從機執行任務時主機發送指令喚醒從機并發送數據控制從機執行相應任務。
1、UART靜默模式
MM32F013x系列MCU UART靜默模式的特點
- 任何接收狀態位都不會被設置
- 所有的接收中斷都被禁止
根據UART_CCR寄存器中的WAKE位狀態,UART多處理器通信有二種方法進入或退出靜默模式分別是:
- WAKE 位被設置0:進行空閑總線檢測。
- WAKE 位被設置1:進行地址標記檢測。
空閑總線檢測
空閑幀喚醒可以同時喚醒所有從機,在從機處于靜默模式時主機發送空閑幀(即所有位均為1的數據)實現多個從機同步被喚醒。
地址標記檢測
地址標記喚醒可以喚醒單個從機,從機進入靜默模式時,主機向從機尋址發送地址幀,從機自動比對地址,地址配對正確則該從機被喚醒,否則繼續進入靜默模式。這樣只有被主機尋址的從機才被喚醒激活并接收數據,從而減少未被尋址的從機參與帶來的多余的UART服務開銷。
2、配置流程
與UART多處理器通信相關的主要寄存器有UART通用控制寄存器、UART接收地址寄存器UART_RXADDR和UART接收掩碼寄存器UART_RXMASK其描述如下寄存器表所示:
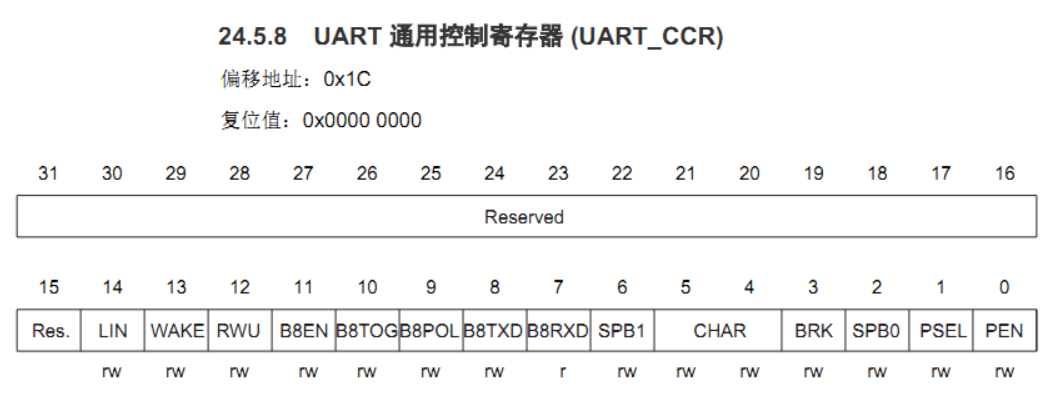
如上圖1所示為UART通用控制寄存器UART_CCR,在MM32F013x UM手冊的第489和第490頁有關于該寄存器位的詳細描述。本實例UART多處理器通信要用到的相關于UART通用控制寄存器UART_CCR位的說明如下:
Bit13
WAKE(rw,reset:0x00)喚醒方法,該位決定UART多機通信從機喚醒的方法。
1:地址標記喚醒。
庫函數設置:
UART_WakeUpConfig(UART1,UART_WakeUp_AddressMark);
0:空閑總線喚醒。
庫函數設置:
UART_WakeUpConfig(UART1, UART_WakeUp_IdleLine);
Bit12
RWU(rw, reset:0x00)接收喚醒,該位用來決定是否把UART置于靜默模式。該位可以由軟件設置或清除。當喚醒序列到來時,硬件也會自動將其清零。
1:接收器處于靜默模式。
庫函數設置:
UART_ReceiverWakeUpCmd(UART1, ENABLE);
0:接收器處于正常工作模式。
庫函數設置:
UART_ReceiverWakeUpCmd(UART1, DISABLE);
注:在設置地址標記喚醒時,如果接收 buffer 非空則不能軟件修改。
Bit11
B8EN(rw, reset:0x00)UART同步幀發送第9bit使能控制位。該位使能后校驗使能PEN不起作用。
1:使能同步幀第9bit發送。
庫函數設置:
UART_Enable9bit(UART1, ENABLE);
0:禁止同步幀第9bit發送。
庫函數設置:
UART_Enable9bit(UART1, DISABLE);
Bit10
B8TOG(rw,reset:0x00)UART同步幀發送第9bit自動翻轉控制位。
1:使能第9bit自動翻轉。
庫函數設置:
UART_Set9bitAutomaticToggle(UART1, ENABLE);
0:禁止第9bit自動翻轉。
庫函數設置:
UART_Set9bitAutomaticToggle(UART1, DISABLE);
注:在 B8TXD 和 B8POL 的值相同時,在配置完寄存器后傳輸的第二個數據開始翻轉,第一個數據默認為地址位。
Bit8
B8TXD(rw,reset:0x00)UART同步幀發送數據第9bit。
1:發送同步幀第9bit為高電平。
庫函數設置:
UART_Set9bitLevel(UART1, ENABLE);
0:發送同步幀第9bit為低電平。
庫函數設置:
UART_Set9bitLevel(UART1, DISABLE)
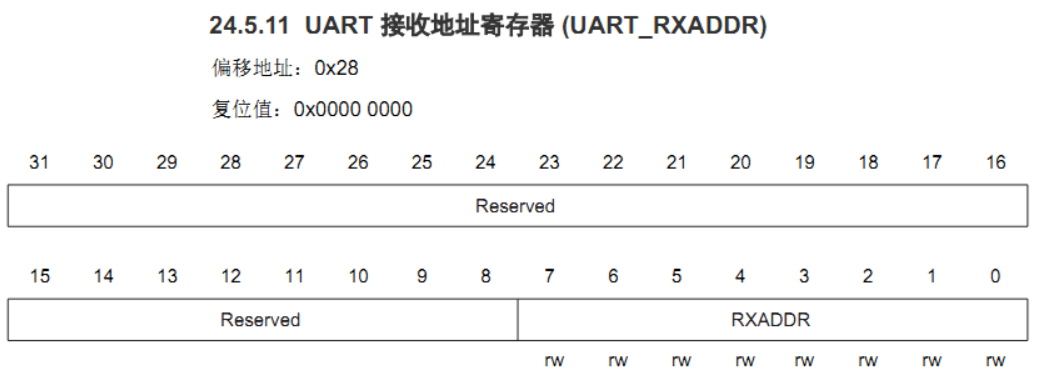
如上圖2所示為UART接收地址寄存器UART_RXADDR,在MM32F013x UM手冊的第491頁有關于該寄存器位的詳細描述。本實例UART多處理器通信要用到的相關于UART_RXADDR接收地址寄存器位的說明如下:
Bit31:8:
Reserved,始終讀為0x00
Bit7:0:
RXADDR(rw,reset:0x00)UART 同步幀數據本機匹配地址。
庫函數設置:
UART_SetRXAddress(UART1, SLAVEADDR);
其中地址參數SLAVEADDR可以設置為宏定義形式。
如果 RXMASK =0xFF時接收到的同步幀數據與本機匹配地址相同時,產生RXB8_INTF。地址 0是廣播地址,收到后都會響應。
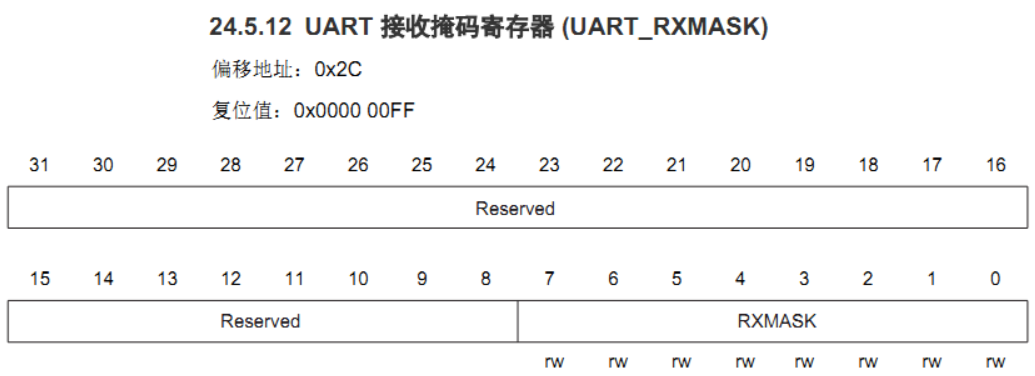
如上圖3所示為UART接收掩碼寄存器UART_RXMASK,在MM32F013x UM手冊的第492頁有關于該寄存器位的詳細描述。本實例UART多處理器通信要用到的相關于UART_RXMSK接收掩碼寄存器位的說明如下:
Bit31:8:
Reserved,始終讀為0x00
Bit7:0:
RXMASK(rw,reset:0xFF)UART數據位全為“0”時,接收到任何數據都產生同步幀中斷請求。如果數據位為“1”,RDR和RXADDR的相應位匹配時,產生同步幀中斷請求。
庫函數設置:
UART_SetRXMASK(UART1,SLAVEADDR); 其中地址參數SLAVEADDR可以設置為宏定義形式。
根據上文與UART 9bit多處理器通信相關的寄存器位的描述,本實例從機喚醒模式使用標記從機地址方式,在MM32F013x-UART 9bit通信實例的基礎上增加從機UART 9bit多處理器通信相關的寄存器位的初始化,這里以庫函數方式給出,增加的4行代碼如下所示:
//Wake up method UART_WakeUpConfig(UART1, UART_WakeUp_AddressMark); //Synchronous frame match address UART_SetRXAddress(UART1, SLAVEADDR); //Synchronous frame match address mask UART_SetRXMASK(UART1,SLAVEADDR); //Receive wake up method UART_ReceiverWakeUpCmd(UART1, ENABLE);
3、程序配置
01、初始化主機MM32F013x UART1 9bit通信
本實例使用MM32F0133C7P核心板作為UART多處理器通信,主機初始化代碼如下所示:
bsp_UART1_Master_irq_9Bit_Init(u32 baudrate) { GPIO_InitTypeDef GPIO_InitStructure; UART_InitTypeDef UART_InitStructure; NVIC_InitTypeDef NVIC_InitStructure; RCC_AHBPeriphClockCmd(RCC_AHBENR_GPIOA, ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_UART1, ENABLE); GPIO_PinAFConfig(GPIOA, GPIO_PinSource9, GPIO_AF_1); GPIO_PinAFConfig(GPIOA, GPIO_PinSource10, GPIO_AF_1); GPIO_StructInit(&GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_Init(GPIOA, &GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; GPIO_Init(GPIOA, &GPIO_InitStructure); UART_StructInit(&UART_InitStructure); UART_InitStructure.BaudRate = baudrate; UART_InitStructure.WordLength = UART_WordLength_8b; UART_InitStructure.StopBits = UART_StopBits_1; UART_InitStructure.Parity = UART_Parity_No; UART_InitStructure.HWFlowControl = UART_HWFlowControl_None; UART_InitStructure.Mode = UART_Mode_Rx | UART_Mode_Tx; UART_Enable9bit(UART1, ENABLE); UART_Set9bitLevel(UART1, DISABLE); UART_Set9bitAutomaticToggle(UART1, ENABLE); UART_Init(UART1, &UART_InitStructure); UART_ITConfig(UART1, UART_IT_RXIEN, ENABLE); NVIC_InitStructure.NVIC_IRQChannel = UART1_IRQn; NVIC_InitStructure.NVIC_IRQChannelPriority = 3; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure); UART_Cmd(UART1, ENABLE); }
02、初始化從機MM32F013x UART1 9bit通信
MM32F0133C7P UART1從機初始化代碼如下所示:
注意:多從機通信,初始化從機串口時需要修改從機地址宏為0x01、0x02等。
#define SLAVEADDR (0x01)
void bsp_UART1_Slave_irq_9Bit_Init(u32 baudrate)
{
GPIO_InitTypeDef GPIO_InitStructure;
UART_InitTypeDef UART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_AHBPeriphClockCmd(RCC_AHBENR_GPIOA, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_UART1, ENABLE);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource9, GPIO_AF_1);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource10, GPIO_AF_1);
GPIO_StructInit(&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD;
GPIO_Init(GPIOA, &GPIO_InitStructure);
UART_StructInit(&UART_InitStructure);
UART_InitStructure.BaudRate = baudrate;
UART_InitStructure.WordLength = UART_WordLength_8b;
UART_InitStructure.StopBits = UART_StopBits_1;
UART_InitStructure.Parity = UART_Parity_No;
UART_InitStructure.HWFlowControl = UART_HWFlowControl_None;
UART_InitStructure.Mode = UART_Mode_Rx | UART_Mode_Tx;
UART_WakeUpConfig(UART1, UART_WakeUp_AddressMark);
UART_WakeUpConfig(UART1, UART_WakeUp_IdleLine);
UART_SetRXAddress(UART1, SLAVEADDR);
UART_SetRXMASK(UART1,0x02);
UART_ReceiverWakeUpCmd(UART1, ENABLE);
UART_Enable9bit(UART1, ENABLE);
UART_Set9bitLevel(UART1, DISABLE);
UART_Set9bitAutomaticToggle(UART1, ENABLE);
UART_Init(UART1, &UART_InitStructure);
UART_ITConfig(UART1, UART_IT_RXIEN, ENABLE);
NVIC_InitStructure.NVIC_IRQChannel = UART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
UART_Cmd(UART1, ENABLE);
}03、編寫MM32F013x UART1主機中斷服務函數
MM32F0133C7P UART1主機中斷服務函數,代碼如下所示:
#define RX_MASTER_LEN (3)
u8 g_Rx_Master_Buf[RX_MASTER_LEN] = {0x00};
u8 g_Rx_Master_Cnt = 0;
void UART1_IRQHandler(void)
{
u8 res;
if(UART_GetITStatus(UART1, UART_IT_RXIEN) != RESET)
{
UART_ClearITPendingBit(UART1, UART_IT_RXIEN);
res = UART_ReceiveData(UART1);
g_Rx_Master_Buf[g_Rx_Master_Cnt] = res;
if(g_Rx_Master_Cnt < RX_MASTER_LEN-1)
{
g_Rx_Master_Cnt++;
}
else
{
g_Rx_Master_Cnt = 0;
}
}
}04、編寫MM32F013x UART1從機中斷服務函數
MM32F0133C7P UART1從機中斷服務函數,代碼如下所示:
#define RX_SLAVE_LEN (3)
u8 g_Rx_Slave_Buf[RX_SLAVE_LEN] = {0x00};
u8 g_Rx_Slave_Cnt = 0;
void UART1_IRQHandler(void)
{
u8 res;
if(UART_GetITStatus(UART1, UART_IT_RXIEN) != RESET)
{
UART_ClearITPendingBit(UART1, UART_IT_RXIEN);
res = UART_ReceiveData(UART1);
g_Rx_Slave_Buf[g_Rx_Slave_Cnt] = res;
if(g_Rx_Slave_Cnt < RX_SLAVE_LEN-1)
{
g_Rx_Slave_Cnt++;
}
else
{
g_Rx_Slave_Cnt = 0;
}
}
}05、編寫MM32F013x UART1主從機
通用發送數據函數
MM32F0133C7P UART1主從機通用發送函數,代碼如下所示:
u8 g_Tx_Master_Buf[2] = {0xAA,0x55};
void bsp_UART_Send_Byte_Data(UART_TypeDef* uart,u8 data)
{
UART_SendData(uart, data);
while(!UART_GetFlagStatus(uart, UART_FLAG_TXEPT));
}
void bsp_UART_Send_Bytes_Data(UART_TypeDef* uart, u8* buf, u16 len)
{
while(len--)
{
bsp_UART_Send_Byte_Data(uart,*buf++);
}
}06、編寫MM32F013x UART1主機發送從機地址函數
MM32F0133C7P UART1主機發送從機地址函數,代碼如下所示:
u8 g_Tx_Master_Buf[2] = {0xAA,0x55};
#define SLAVEADDR1 (0x01)
#define SLAVEADDR2 (0x02)
void bsp_UART_Send_SlaveAddr(UART_TypeDef* uart,u8 data)
{
UART_SendData(uart, data);
while(!UART_GetFlagStatus(uart, UART_FLAG_TXEPT));
}07、編寫MM32F013x UART1主機按鍵
發送從機地址和數據函數
宏定義按鍵GPIO端口和管腳,本實例只用到MM32F013x核心板的PA0作為KEY1對應核心板。
#define KEY1_GPIO_Port GPIOA #define KEY1_Pin GPIO_Pin_0 #define KEY2_GPIO_Port GPIOB #define KEY2_Pin GPIO_Pin_2 #define KEY3_GPIO_Port GPIOB #define KEY3_Pin GPIO_Pin_10 #define KEY4_GPIO_Port GPIOB #define KEY4_Pin GPIO_Pin_11 #define KEY1 GPIO_ReadInputDataBit(KEY1_GPIO_Port,KEY1_Pin) //read key1 #define KEY2 GPIO_ReadInputDataBit(KEY2_GPIO_Port,KEY2_Pin) //read key2 #define KEY3 GPIO_ReadInputDataBit(KEY3_GPIO_Port,KEY3_Pin) //read key3 #define KEY4 GPIO_ReadInputDataBit(KEY4_GPIO_Port,KEY4_Pin) //read key4 #define KEY1_DOWN_VALUE 1 //KEY1 #define KEY2_DOWN_VALUE 0 //KEY2 #define KEY3_DOWN_VALUE 0 //KEY3 #define KEY4_DOWN_VALUE 0 //KEY4 #define KEY1_PRES 1 //KEY1 #define KEY2_PRES 2 //KEY2 #define KEY3_PRES 3 //KEY3 #define KEY4_PRES 4 //KEY4 //Init Key GPIO void bsp_Key_GPIO_Init(void) { GPIO_InitTypeDef GPIO_InitStructure; RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOA | RCC_AHBPeriph_GPIOB ,ENABLE); GPIO_StructInit(&GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = KEY1_Pin; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; GPIO_Init(KEY1_GPIO_Port, &GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = KEY2_Pin; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; GPIO_Init(KEY2_GPIO_Port, &GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = KEY3_Pin; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; GPIO_Init(KEY3_GPIO_Port, &GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = KEY4_Pin; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; GPIO_Init(KEY4_GPIO_Port, &GPIO_InitStructure); } u8 bsp_Key_Scan(u8 mode) { static u8 key_up = 1; if(mode) { key_up = 1; } if(key_up && ((KEY1 == KEY1_DOWN_VALUE) || (KEY2 == KEY2_DOWN_VALUE) || / (KEY3 == KEY3_DOWN_VALUE) || (KEY4 == KEY4_DOWN_VALUE))) { DELAY_Ms(10); key_up = 0; if(KEY1 == KEY1_DOWN_VALUE) { return KEY1_PRES; } else if(KEY2 == KEY2_DOWN_VALUE) { return KEY2_PRES; } else if(KEY3 == KEY3_DOWN_VALUE) { return KEY3_PRES; } else if(KEY4 == KEY4_DOWN_VALUE) { return KEY4_PRES; } } else if((KEY1 != KEY1_DOWN_VALUE) && (KEY3 != KEY3_DOWN_VALUE) && / (KEY4 != KEY4_DOWN_VALUE) && (KEY2 != KEY2_DOWN_VALUE)) { key_up = 1; } return 0; } u8 Key_Nnum = 0; void bsp_Process_Key_Task(void) { static u8 Key_Value = 0; Key_Value = bsp_Key_Scan(0); switch(Key_Value) { case KEY1_PRES: if(Key_Nnum == 0) { Key_Nnum = 1; bsp_UART_Send_SlaveAddr(UART1, SLAVEADDR1); //Send SlaveAddr1 bsp_UART_Send_Bytes_Data(UART1, g_Tx_Master_Buf, sizeof(g_Tx_Master_Buf)); //Send data } else if(Key_Nnum == 1) { Key_Nnum = 0; bsp_UART_Send_SlaveAddr(UART1, SLAVEADDR2); //Send SlaveAddr2 bsp_UART_Send_Bytes_Data(UART1, g_Tx_Master_Buf, sizeof(g_Tx_Master_Buf)); //Send data } break; case KEY2_PRES: break; case KEY3_PRES: break; case KEY4_PRES: break; default : break; } }
08、編寫MM32F013x UART1主機
接收從機返回的數據函數
處理MM32F0133C7P UART1主機接收數據函數,代碼如下所示:
void bsp_UART_Master_Rec_Task(void)
{
if(((g_Rx_Master_Buf[0] == SLAVEADDR1 ) || (g_Rx_Master_Buf[0] == SLAVEADDR2)) && (g_Rx_Master_Buf[1] == 0xAA) && (g_Rx_Master_Buf[2] == 0x55))
{
LED1_TOGGLE();
g_Rx_Master_Cnt = 0;
memset(g_Rx_Master_Buf,0,sizeof(g_Rx_Master_Buf));
}
}09、編寫MM32F013x UART1從機
接收主機發送的數據函數
處理MM32F0133C7P UART1主機接收數據函數,代碼如下所示:
注意:g_Rx_Slave_Buf[1]為主機發送給從機的地址由從機接收判斷,多從機通信需要修改從機地址宏:#define SLAVEADDR (0x02)等。
void bsp_UART_Slave_Rec_Task(void)
{
if((g_Rx_Slave_Buf[0] == SLAVEADDR) && (g_Rx_Slave_Buf[1] == 0xAA) && (g_Rx_Slave_Buf[2] == 0x55))
{
LED1_TOGGLE();
bsp_UART_Send_Bytes_Data(UART1, g_Rx_Slave_Buf, sizeof(g_Rx_Slave_Buf));
g_Rx_Slave_Cnt = 0;
memset(g_Rx_Slave_Buf,0,sizeof(g_Rx_Slave_Buf));
}
}10、MM32F013x UART1 9bit多處理器通信功能演示
MM32F0133C7P多處理器通信功能演示:
主機main函數中調用DELAY_Init、LED_Init、bsp_Key_GPIO_Init和主機串口初始化函數bsp_UART1_Master_irq_9Bit_Init,在while(1)后臺調用按鍵發送從機地址和發送數據函數bsp_Process_Key_Task以及處理接收從機返回數據函數bsp_UART_Master_Rec_Task代碼如下所示:
s32 main(void)
{
//SysTick init
DELAY_Init();
//LED Init
LED_Init();
//Key GPIO Init
bsp_Key_GPIO_Init();
//UART1 9Bit irt Init
bsp_UART1_Master_irq_9Bit_Init(115200);
while(1)
{
//Key processing multi-processor communication
bsp_Process_Key_Task();
//Processing master receiving tasks
bsp_UART_Master_Rec_Task();
}
}從機main函數中調用LED_Init和從機串口初始化函數bsp_UART1_Slave_irq_9Bit_Init,在while(1)后臺調用處理從機接收任務函數bsp_UART_Slave_Rec_Task代碼如下所示:
s32 main(void)
{
//LED Init
LED_Init();
//UART1 9bit init
bsp_UART1_Slave_irq_9Bit_Init(115200);
while(1)
{
//Processing slave receiving tasks
bsp_UART_Slave_Rec_Task();
}
}分別編譯以上主機和從機工程代碼,然后燒錄軟件到MM32F0133C7P核心板上,燒錄多從機時需修改從機工程代碼的從機地址宏SLAVEADDR,編譯后再燒錄。本實例從機燒錄0x01和x02為例作為演示,即1臺主機和2臺從機作為演示。
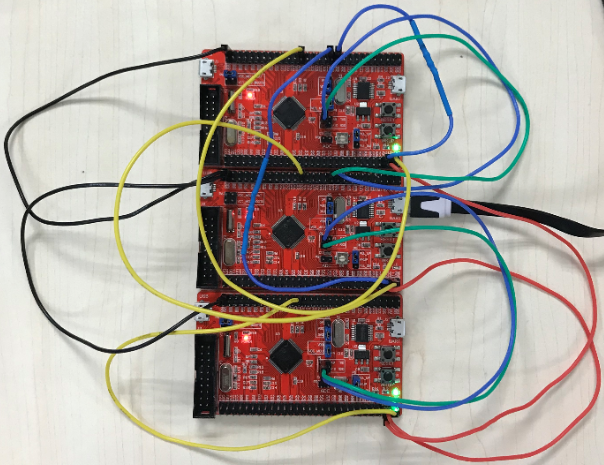
4、接線方式
MM32F0133C7P多處理器通信UART主機和從機接線方法:
各從機TX線與連接,RX線與連接,從機線與連接的TX接到主機RX端,從機線與連接的RX接到主機的TX端,主從機分別外接5.1~10K值范圍之一的上拉電阻,本實例接5.1K上拉電阻。
MM32F0133C7P UART多處理器通信演示1臺主機和2臺從機分別發送和接收數據:
主機第1次按下MM32F0133C7P核心板上的S1按鍵,主機發送1字節從機地址0x01,接著發送2字節數據0xAA和0x55,從機1(地址0x01)在靜默模式下自動比對主機尋址從機的地址0x01比對成功從機1被喚醒繼續接收0xAA和0x55數據,收到完整的3字節數據時從機LED1狀態翻轉LED1亮并原樣返回收到的數據給主機,此時從機2仍處于靜默模式,主機完全收到從機1返回的3字節數據即0x01,0XAA,0x55時主機LED1狀態翻轉LED亮,實物現象如下圖4所示。

主機第2次按下MM32F0133C7P核心板上的S1按鍵,主機發送1字節從機地址0x02,接著發送2字節數據0xAA和0x55,從機2(地址0x02)在靜默模式下自動比對主機尋址從機的地址0x02比對成功從機2被喚醒繼續接收0xAA和0x55數據,收到完整的3字節數據時從機LED1狀態翻轉LED1亮并原樣返回收到的數據給主機,此時從機1仍處于靜默模式其LED1維持上次點亮狀態,主機完全收到從機2返回的3字節數據時即0x02,0XAA,0x55時主機LED1狀態翻轉LED滅,實物現象如下圖5所示:
5、波形抓取
邏輯分析儀抓取到的MM32F0133C7多處理器通信波形圖如下圖6和圖7所示:
圖6上波形紅色框注為主機發送:0x01、0xAA、0x55尋址從機1,從機(地址0x01)從靜默模式喚醒并收到主機發送的數據0xAA和0x55時原樣返回給主機如圖6下波形藍色框注:0x01、0xAA、0x55,此時從機2(地址0x02)并未作響應仍處于靜默模式。
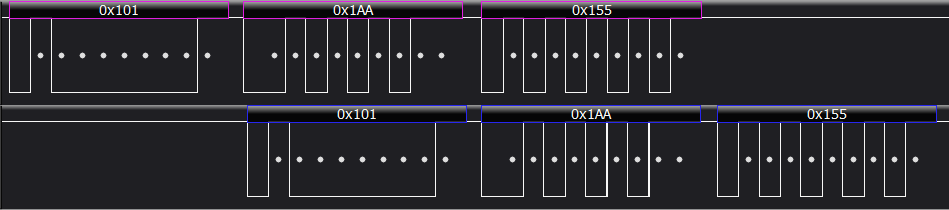
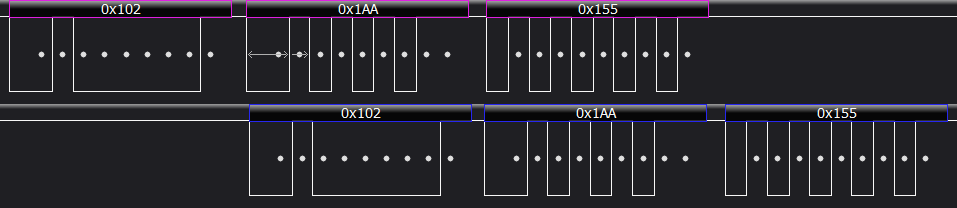
圖7上紅色框注為主機發送:0x02、0xAA、0x55尋址從機2,從機(地址0x02)從靜默模式喚醒并收到主機發送的數據0xAA和0x55時原樣返回給主機如圖7下波形藍色框注:0x02、0xAA、0x55,此時從機1(地址0x01)并未作響應仍處于靜默模式。
轉自:靈動MM32MCU
- 基于VPX6-460的多處理器通信設計
- 基于VPX6—460的多處理器通信設計
- MM32F013x——ADC任意通道工作模式
- MM32F013x——RTC鬧鐘定時喚醒
- MM32F013x——移植EasyLogger組件
- MM32F013x——UART 多處理器通信
- MM32F013x——UART 極性取反通信
- MM32F013x——UART 單線半雙工通信
- MM32F013x——UART ISO7816-3協議的應用
- MM32F013x——ADC任意通道工作模式
- MM32F013x——萬年歷
- MM32F013x——移植EasyLogger組件
- 基于ARM Cortex M0的微控制器MM32F013x 22次下載
- MM32F013x——UART 單線半雙工通信
- MM32F013x——UART 極性取反通信
- MM32F5330微控制器基本介紹 TinyUSB Host基本移植介紹 1518次閱讀
- Cache技術在星辰處理器中的應用 656次閱讀
- 淺談ARM處理器的基礎知識 2503次閱讀
- 基于多處理器系統的串行通信方式研究 1927次閱讀
- UART寄存器介紹與中斷操作詳解 1.5w次閱讀
- 深度解讀多處理器調度問題 2842次閱讀
- 采用WISHBONE總線有效地解決IP核可移植性、設計復用問題 864次閱讀
- 基于Verilog的UART串行通信接口電路設計 2213次閱讀
- 在異構處理器上跑Linux方法介紹 1428次閱讀
- 基于64位多核處理器的共享緩存結構電路設計 1682次閱讀
- 基于RS485總線設計的多處理器RS485通信網絡 3776次閱讀
- 一文讀懂異構多處理系統 4872次閱讀
- 全球十大平板電腦處理器廠商盤點 9425次閱讀
- 提高FPGA處理總線性能的RapidIO節點設計 2974次閱讀
- 利用異步通信芯片16C552實現PC機與DSP的串行通訊 1727次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 2開關電源基礎知識
- 5.73 MB | 6次下載 | 免費
- 3100W短波放大電路圖
- 0.05 MB | 4次下載 | 3 積分
- 4嵌入式linux-聊天程序設計
- 0.60 MB | 3次下載 | 免費
- 5基于FPGA的光纖通信系統的設計與實現
- 0.61 MB | 2次下載 | 免費
- 6基于FPGA的C8051F單片機開發板設計
- 0.70 MB | 2次下載 | 免費
- 751單片機窗簾控制器仿真程序
- 1.93 MB | 2次下載 | 免費
- 8基于51單片機的RGB調色燈程序仿真
- 0.86 MB | 2次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33564次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21548次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6653次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537796次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420026次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191185次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183278次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網監
工商網監
評論