 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
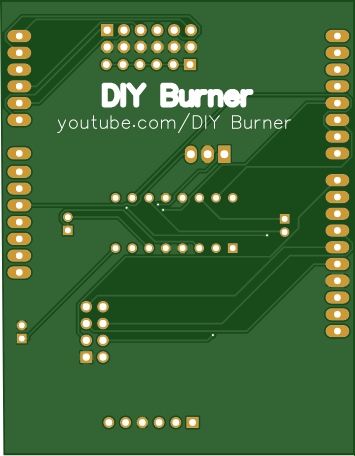
PCB圖如下: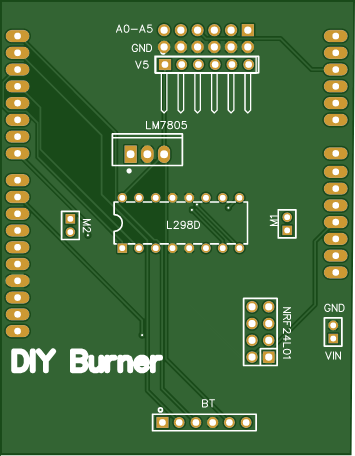
?
成分
| nRF24Lo1+ | × 1 |
| L298D電機驅動IC | × 1 |
| 7805穩壓器 | × 1 |
| ARDUINO UNO REV3 | × 1 |
描述
如何制作手勢控制機器人|| #MadeWithArduino(接收器 PCB)
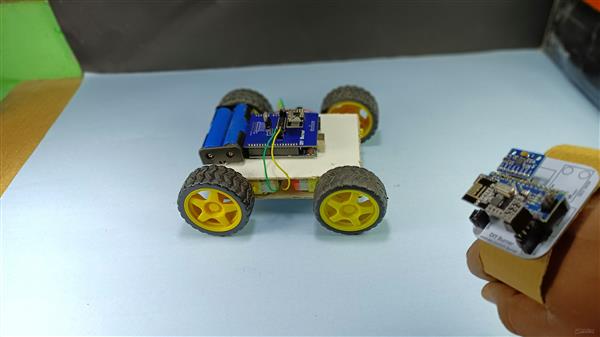
嘿,歡迎回到一個新項目。所以今天我們將學習使用Arduino創建一個手勢控制車。
在這里我將分享項目的Receiver部分的詳細教程,我還分享了另一個關于項目的Transmitter部分的教程。這是查看它的鏈接:https ://bit.ly/3z9FzZQ
查看 YouTube 上的項目教程視頻:
首先說一下我們需要的材料:
?阿杜諾烏諾
~ L298D 馬達驅動IC
~ nRF24Lo1+
?男性和女性頭
~ 7805 5V 穩壓器
~ 18650 電池
開始安裝組件:
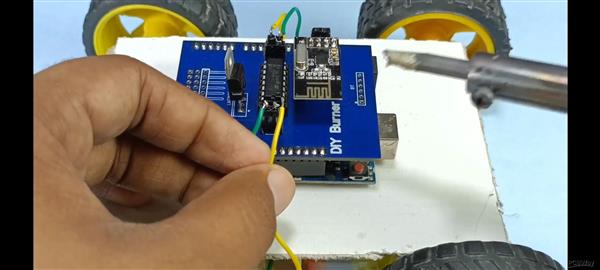
安排好上述組件后,我們需要將母頭和公頭引腳焊接到 PCB,如圖所示。

現在,我們需要將組件一個一個地安裝到 PCB 上。在以下模式中:

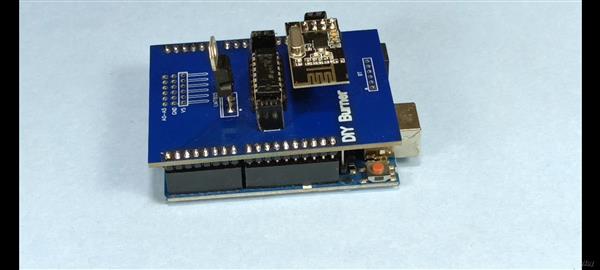
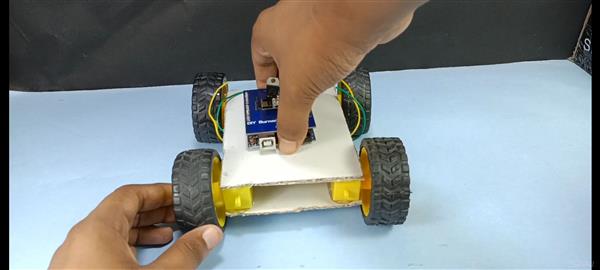
現在將 PCB 安裝到 Arduino Uno 中。如下所示:
現在我們需要使用雙面膠帶將 Arduino Uno 安裝到機箱中。
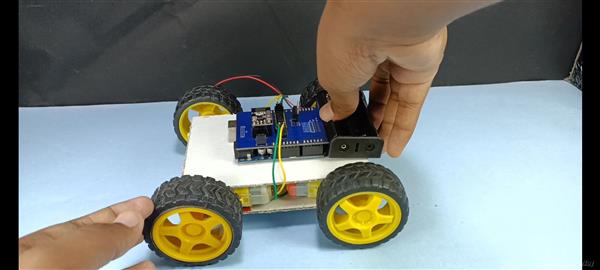
在此之后,我們需要將電機線連接到 PCB 電機輸出引腳。
現在將電池座安裝到機箱上,并將正極線連接到 PCB 的 Vin 引腳,將負極線連接到 PCB 的 GND 引腳。
安裝完組件后,我們需要上傳本文附件中給出的代碼。
注意:在上傳代碼之前,請確保將 Arduino Uno 與您的計算機連接并包含所需的庫。
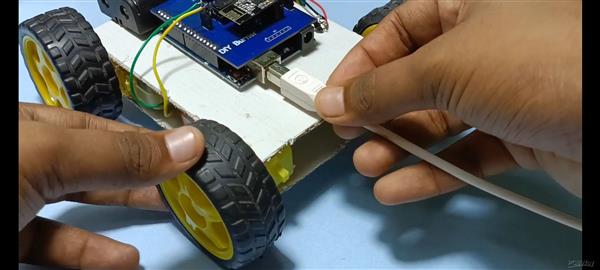
連接后,打開Arduino IDE并上傳代碼。
完成代碼上傳后,只需斷開 Arduino Uno 與計算機的連接。
這就是這個項目的全部內容。請務必查看 Transmitter 項目教程 ( https://bit.ly/3z9FzZQ ) 并查看我們的 YouTube 教程視頻:https ://youtu.be/h1LBA7dPYe0
謝謝你。
代碼
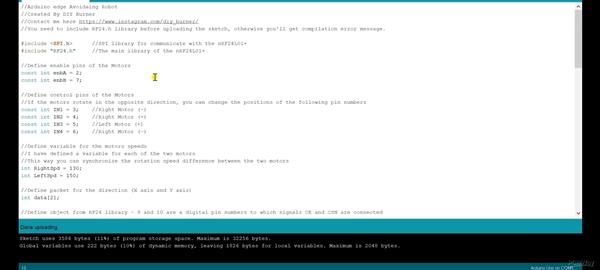
手勢控制汽車接收器代碼
C/C++
| ? | //Arduino Gesture control Receiver Code |
| ? | //Created By DIY Burner |
| ? | //Contact me here https://www.instagram.com/diy_burner/ |
| ? | //You need to include RF24.h library before uploading the sketch, otherwise you'll get compilation error message. |
| ? | ? |
| ? |
#include |
| ? | #include "RF24.h" //The main library of the nRF24L01+ |
| ? | ? |
| ? | //Define enable pins of the Motors |
| ? | const int enbA = 2; |
| ? | const int enbB = 7; |
| ? | ? |
| ? | //Define control pins of the Motors |
| ? | //If the motors rotate in the opposite direction, you can change the positions of the following pin numbers |
| ? | const int IN1 = 3;//Right Motor (-) |
| ? | const int IN2 = 4;//Right Motor (+) |
| ? | const int IN3 = 5;//Left Motor (+) |
| ? | const int IN4 = 6;//Right Motor (-) |
| ? | ? |
| ? | //Define variable for the motors speeds |
| ? | //I have defined a variable for each of the two motors |
| ? | //This way you can synchronize the rotation speed difference between the two motors |
| ? | int RightSpd = 130; |
| ? | int LeftSpd = 150; |
| ? | ? |
| ? | //Define packet for the direction (X axis and Y axis) |
| ? | int data[2]; |
| ? | ? |
| ? | //Define object from RF24 library - 9 and 10 are a digital pin numbers to which signals CE and CSN are connected |
| ? | RF24 radio(8,9); |
| ? | ? |
| ? | //Create a pipe addresses for the communicate |
| ? | const uint64_t pipe = 0xE8E8F0F0E1LL; |
| ? | ? |
| ? | void setup(){ |
| ? | //Define the motor pins as OUTPUT |
| ? | pinMode(enbA, OUTPUT); |
| ? | pinMode(enbB, OUTPUT); |
| ? | pinMode(IN1, OUTPUT); |
| ? | pinMode(IN2, OUTPUT); |
| ? | pinMode(IN3, OUTPUT); |
| ? | pinMode(IN4, OUTPUT); |
| ? | ? |
| ? | Serial.begin(9600); |
| ? | radio.begin();//Start the nRF24 communicate |
| ? | radio.openReadingPipe(1, pipe); //Sets the address of the transmitter to which the program will receive data. |
| ? | radio.startListening(); |
| ? | } |
| ? | ? |
| ? | void loop(){ |
| ? | if (radio.available()){ |
| ? | radio.read(data, sizeof(data)); |
| ? | ? |
| ? | if(data[0] > 380){ |
| ? | //forward |
| ? | analogWrite(enbA, RightSpd); |
| ? | analogWrite(enbB, LeftSpd); |
| ? | digitalWrite(IN1, HIGH); |
| ? | digitalWrite(IN2, LOW); |
| ? | digitalWrite(IN3, HIGH); |
| ? | digitalWrite(IN4, LOW); |
| ? | } |
| ? | ? |
| ? | if(data[0] < 310){ |
| ? | //backward |
| ? | analogWrite(enbA, RightSpd); |
| ? | analogWrite(enbB, LeftSpd); |
| ? | digitalWrite(IN1, LOW); |
| ? | digitalWrite(IN2, HIGH); |
| ? | digitalWrite(IN3, LOW); |
| ? | digitalWrite(IN4, HIGH); |
| ? | } |
| ? | ? |
| ? | if(data[1] > 180){ |
| ? | //left |
| ? | analogWrite(enbA, RightSpd); |
| ? | analogWrite(enbB, LeftSpd); |
| ? | digitalWrite(IN1, HIGH); |
| ? | digitalWrite(IN2, LOW); |
| ? | digitalWrite(IN3, LOW); |
| ? | digitalWrite(IN4, HIGH); |
| ? | } |
| ? | ? |
| ? | if(data[1] < 110){ |
| ? | //right |
| ? | analogWrite(enbA, RightSpd); |
| ? | analogWrite(enbB, LeftSpd); |
| ? | digitalWrite(IN1, LOW); |
| ? | digitalWrite(IN2, HIGH); |
| ? | digitalWrite(IN3, HIGH); |
| ? | digitalWrite(IN4, LOW); |
| ? | } |
| ? | ? |
| ? | if(data[0] > 330 && data[0] < 360 && data[1] > 130 && data[1] < 160){ |
| ? | //stop car |
| ? | analogWrite(enbA, 0); |
| ? | analogWrite(enbB, 0); |
| ? | } |
| ? | } |
| ? | } |
?
- 手勢控制機器人開源項目
- 手勢控制機器人開源硬件
- 使用智能手機制作手勢控制機器人
- 基于Arduino Pro Mini的機器人手勢控制器 2次下載
- 手勢控制機器人開源分享
- 使用TensorFlow對自平衡機器人進行手勢控制
- 如何在家制作DIY Arduino手勢控制機器人
- 遙控玩具或機器人三通道接收器
- 如何制作手勢控制機器人-MadeWithArduino(發射器)
- 基于DSP控制器的油氣安全智能巡檢機器人 40次下載
- 基于DSP和PC的農業機器人控制系統 17次下載
- 機器人PID控制概述 27次下載
- 機器人創新制作方法 18次下載
- 競賽機器人制作技術PDF電子書免費下載 44次下載
- 手勢對工業機器人進行控制 0次下載
- 如何使用PLC控制機器人 789次閱讀
- 如何利用ADXL335實現手勢控制機器人的設計 2888次閱讀
- 機器人控制系統概念與系統特點 5171次閱讀
- 基于SMARS 機器人的3D打印部件設計 3228次閱讀
- 基于LPC2114處理器實現人形機器人控制系統的設計 3334次閱讀
- 基于PIC單片機和PSC控制器實現機器人控制系統的設計 3699次閱讀
- 一文了解機器人控制系統 5036次閱讀
- 機器人控制系統分類_機器人控制系統有哪些 2.6w次閱讀
- 焊接機器人控制器的作用 6070次閱讀
- 機器人控制器有哪些類型_機器人控制器發展 1.1w次閱讀
- 移動機器人控制系統設計與仿真 3433次閱讀
- 機器人控制系統的基本單元與機器人控制系統的特點分析 1w次閱讀
- 機器人的運動控制的介紹和如何將機器人的運動控制分成4種任務 1w次閱讀
- 軟體機器人 前所未見的機器人 3692次閱讀
- 詳細解析工業機器人控制系統 3.5w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數據手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網監
工商網監
評論