 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
動機
(極客直接跳到挑戰和現有解決方案部分)
用于監控各種環境和天氣條件(溫度、濕度、壓力、光線、雨水、氣體、運動)的(自制)物聯網系統的設計和部署已成為每個(初級)愛好者所做的最受歡迎的項目之一一生至少一次。來自 OEM 和 DIY 套件供應商的硬件構建塊的可用性,以及大量的免費軟件(開源、現成的解決方案、庫、驅動程序、IDE、應用程序、操作系統、云中間件等)已經使項目純粹是明智的。設計師的角色通常被簡化為只選擇正確的傳感器模塊,這些模塊連接到“強大”的 MCU 板(ESP32 、Raspberry 、Arduino),將現有軟件(驅動程序、庫)粘合在一起,并編寫簡單的應用程序邏輯。更不用說無數的指南、博客和 YouTube 教程了。
這種方法具有許多優點,例如快速原型制作、不需要深入的知識和經驗、非常有趣、大量支持以及沒有(或顯著減少)挫折感。對于那些決定進一步推進該項目并希望在其財產中/周圍構建和部署大量傳感器,甚至商業化(至少將解決方案出售給您的朋友或家人)的少數人來說,這種方法有幾個缺點。最重要的是解決方案的整體價格(如果你賣掉它,利潤會更低)。事實上,它可能比知名品牌的高價產品便宜。但是,使用ESP32 (雙核 32 位 @ 160 或 240MHz、320 KiB RAM、448 KiB ROM CPU 以及大量 IO 和總線)從臭名昭著的傳感器(例如DHT11, DHT22 , DS18B20 , AM2320 , BMP280 ) 通過 SPI/I2C/單線總線。除此之外,使用 Wi-Fi 將幾個字節轉發到中央集線器(另一個 ESP32 或 Raspberry)與(能源)效率無關。藍牙低功耗 (BTE) 配置文件可能會有所改進,但是,模塊(例如HC-05)的價格比 MCU 本身(包括一些傳感器)貴數倍。
綜上所述,小型物聯網傳感器主要有兩個非功能性需求:
- 成本優化:由于數量大,生產要經濟。因此,物聯網傳感器應該體積小(PCB),基于低端和低成本的 MCU (以最大限度地利用資源),并使用廉價的連接進行遠程訪問。低端 MCU 的引腳數較少,有利于 PCB 優化,但它限制了連接的 IO 設備/傳感器的數量。此外,低端 MCU資源稀缺(閃存、RAM、IO、總線),這限制了整體功能(應用程序并需要 IO 協議的 SW bit-banging)。然而,物聯網傳感器通常只收集少數環境屬性(2 個,也許 3 個)。這不需要使用大量的引腳和 MCU 資源。
- 易于部署和自主:傳感器應易于重新部署(連接),無需改變其周圍和環境。不需要額外安裝電線來為傳感器提供電源和通信,即傳感器應該是無線的和電池供電的(或能夠從環境中提取能量)。因此,此類傳感器(包括通信模塊)需要超低功耗(納至微安范圍)以避免頻繁更換電池。
對于通信模塊,有多種 COTS 選項可以同時滿足低成本和超低功耗的需求。其中之一是收發器nRF24L01+,特別受創客和愛好者的歡迎。它價格低廉(中國網上商店的分線板從 0.8 美元起)和超低功耗(掉電模式下為 990nA,待機模式下為 22uA,最大功率下 TX/RX 期間為 12mA)。此外,它具有簡單的接口(盡管是 3.3V 供電設備,但具有 5V 容限邏輯引腳的 SPI)、許多有利的特性(例如 ISM 頻帶 2.4GHz,范圍從 100 到 1000m、0.5-1-2 Mbps 帶寬、自動-retransmit、auto CRC check、multiciever)、大量廉價(突破)模塊(見下文)和幾個 SW 庫(nRF24 用于 Arduino/Raspberry Linux )。
受愛好者歡迎的典型低端(成本)MCU 是8 位 AVR子系列,帶有稱為ATtiny的有限外設集,特別是 8 針25/45/85和 14 針24/44/84版本(第一個數字是以 KiB 為單位的閃存大小)。Arduino 的 28 針ATmega328P屬于 ATmega 系列,具有廣泛的外設和指令集。它提供 32KiB 閃存、4 倍更大的 RAM、更多 IO 設備,而且價格更高。在 (PCB) 尺寸、低引腳數和成本非常重要的情況下,ATtiny 系列 25/45/85 和 24/44/84 可能比 328P 更可取。
另一個有趣的低端 MCU 是帶有 1KiB 閃存和 64B SRAM的 8 針ATtiny13A 。它比 25/45/85 和 24/44/84 ATtiny 系列便宜 2-4 倍(< 1 美元)并且消耗更少的能量。因此,它在小型、簡單、電池供電的低成本設計(大多數無線傳感器都是如此)中特別受歡迎。
將 ATtiny13A 與低功耗無線模塊 nRF24L01+ 相結合,對于滿足上述非功能性要求的物聯網傳感器來說,似乎是一個可行的選擇。
為什么有人會費心將 nRF24L01+ 安裝在 8 針微型 ATtiny13A 和 1 KiB 閃存上的另一個原因,該閃存已經有 3 個針腳被超低功耗設備中的傳感器占用,這是……只是為了玩得開心,大笑,很棒有趣,因為:
“在 2K 中,你幾乎沒有刷牙的空間。”
-喬·德庫爾
挑戰和現有解決方案
由于硬件和軟件的挑戰,低端 8 針 ATtiny13A 與 nRF24L01 的組合并非易事。在我們對通用 8 引腳 MCU 的評論中,我們更詳細地描述了這種結合所面臨的硬件和軟件挑戰。回想一下,硬件挑戰如下圖所示:
ATtiny13A 實際上有 5 個引腳。如果我們將 PB5 從其主要功能(RESET/dWIRE)重新編程到 IO 端口,我們有 6 個引腳。但是,所有 6 引腳的使用都需要高壓編程。這對于在線串行編程 (ICSP) 并不總是可行的。此外,我們沒有任何備用引腳用于連接傳感器或連接到現場總線。從審查的現有解決方案來看,所有硬件提案原則上都適用于 ATtiny13A ,但每個都有相關的“成本”:
- Ralph 的 2 和 3 引腳解決方案需要幾個額外的無源元件。將 CE 永久拉高將無法充分利用 nRF24 模塊的節能功能。因此,它不是超低功耗應用的理想解決方案。
- 不使用 IRQ 信號將釋放 1 針(例如 PB5),可用于其主要功能(RST/dWIRE),但我們仍然無法連接其他設備。
- 共享 CE 引腳不是通用解決方案。CSN 低時不會干擾模塊。但是,當用于控制 nRF24 時,它可能與任何連接的設備或現場總線不兼容。
- 單向 SPI 適用于與主網關具有單向(單工)通信的無線傳感器網絡 (WSN)。因此,這不是通用解決方案,而是適用于特定類型的 WSN。
不幸的是,并非所有經過審查的軟件解決方案都具有足夠低的內存占用和/或支持所有功能:
- 用于 Arduino 和 RPi 的 nRF 驅動程序具有針對ATtiny 子系列的優化分支。前叉仍然很大,甚至無法容納內存是 t13a 兩倍的 ATtiny2313A。
- Nerd Ralp將針對 ATtiny84 (8KiB 閃存,14 針)定制的 tinkerer.eu 庫移植到他的 ATtiny85(8KiB 閃存)。目前尚不清楚總體占用空間是多少以及它是否適合 1KiB 閃存。此外,該庫依賴于 t13a 系列中未提供的通用串行接口 (USI) 外圍設備。這可以通過bit-banging來解決。
- 這個特定的共享 CE 引腳解決方案在 t13a 上運行,nRF24 的 SW 驅動程序是一個精簡的Mirf 庫,它只支持傳輸(盡管它需要具有 MOSI 和 MISO 信號的雙向 SPI)。
總而言之:所有列出的硬件解決方案都只優化了一個參數——引腳數。它們都沒有同時優化 1)能耗、2) 引腳數和3) 代碼占用空間。這對于超低功耗應用至關重要。此外,還缺少一個合適的 SW 驅動程序來支持半雙工無線通信,該驅動程序可以適合 t13a 以及支持一些引腳數優化解決方案。我們認為還有進一步提升的空間。出于這個原因,我們設計了一個全新的 SW 庫,將在本文的其余部分進行描述。該庫支持以下分別描述的三種硬件配置:
- 共享 CE 和 CSN 信號 - 它可以獨立使用,也可以與其余兩種配置組合使用。
- 3線SPI(合并MISO和MOSI),
- 可選單向 SPI(無 MISO)。
配置 1:共享 CE 和 CSN
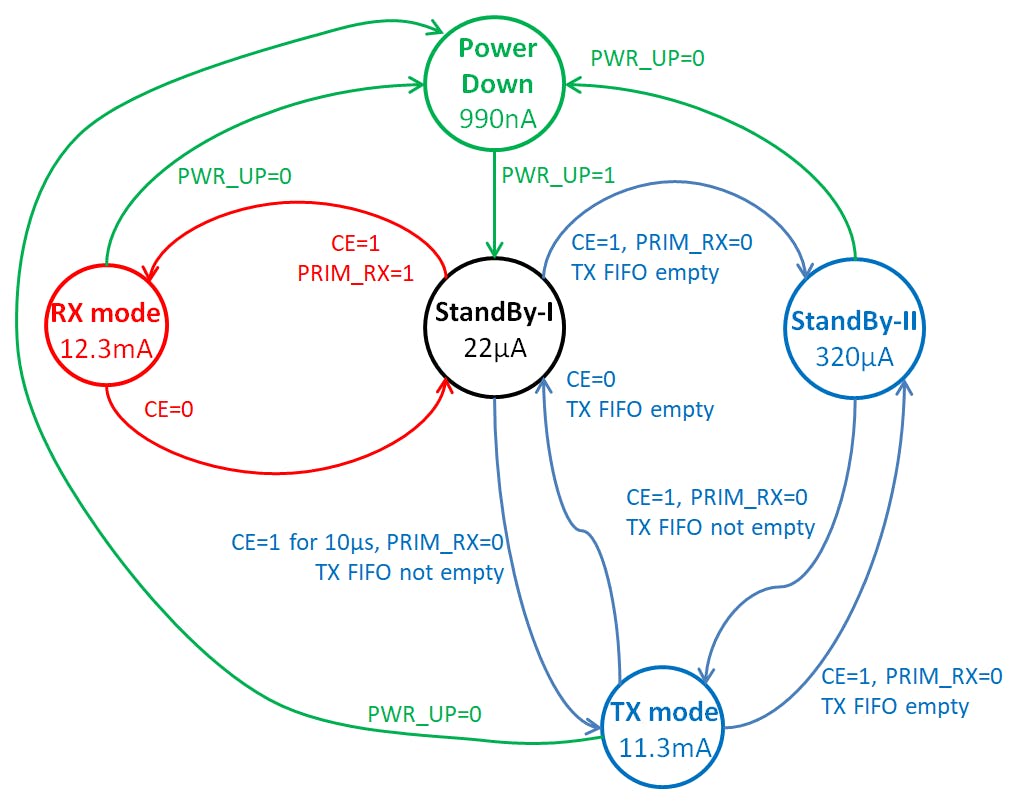
CE 和 CSN 都是輸入引腳,根據nRF24 產品規范:
- CSN 是片選,低電平有效。需要至少 50ns的脈沖(低-高-低)持續時間來指示 SPI 上新事務的開始(規范中的第 49 頁,圖 25 和參數 Tcwh,表 18-25)。如果我們保持 CSN 關閉但不提供時鐘信號 (CSK),則不會有數據流過,模塊也不會收到任何命令。因此,nRF24 將保持其當前狀態,內部寄存器不會受到影響。
- CE 用于在 RX 或 TX 模式下激活芯片,高電平有效。要將模塊的無線電切換到 TX 或 RX 模式,需要至少 10us的脈沖(第 22 頁的第 6.1.5 節和第 40 頁的圖 13)。
由此我們可以識別出共享 CE/CSN 信號的以下情況:
1) CE/CSN 為低電平,SCK 上無脈沖:默認情況,未啟用無線電,nRF24 不受影響。
2) CE/CSN 為低電平,SCK 上的時鐘信號:MCU 和 nRF 模塊之間通過 SPI 傳輸數據。
3) CE/CSN 上的脈沖大于 50ns 且小于 10us :復位 SPI 接口并指示新事務的開始。
4) CE/CSN 上的10us脈沖:如果模塊之前處于StandBy-1模式(通過 SPI 接口設置配置寄存器中的 PWR_UP 位激活),則啟用無線電模式(TX 或 RX)。
5) 將 CE/CSN 拉高 10us 以上:在 RX 模式下用于等待新消息。
我們將使用條件 (1) CE/CSN 低作為信號的默認狀態。我們是否要啟用/禁用無線電(通常由 CE 控制)或通過 SPI 讀/寫寄存器(通常由 CSN 控制)的選擇將使用不同的脈沖持續時間“編碼”。
如果我們想在 SPI 上執行事務(訪問控制/狀態寄存器和 TX/RX 數據緩沖區),該過程將采取以下步驟:
- 1 -> 3 -> 2 -> 1 。
要啟用收音機,讓我們首先看看 TX 模式。在我們切換到 TX 模式之前,我們必須正確配置 nRF24 模塊(上電,進入StandBy-1模式)并將數據上傳到 TX 緩沖區。這是通過上述常規 SPI 事務和步驟完成的。之后,觸發傳輸的過程將采取以下步驟:
- 1 -> 4 -> 1
模塊將切換到 TX 模式,將執行所有操作(傳輸、等待確認、重傳、超時),并且在所有 TX 緩沖區為空后將切換回StandBy-1模式,因為 CE 為低電平。如果我們一直保持 CE 為高電平,即使緩沖區為空,模塊也會進入StandBy-2狀態。不同之處在于功耗:22uA 與 320uA,即StandBy-2 的15 倍。這樣的功耗等于完全激活狀態下 1MHz 的 ATtiny13A。模塊將停留在StandBy-1直到 MCU 將 nRF24 池化為狀態并最終關閉無線電(PWR_UP=0 位),即切換到PowerDown僅消耗 990nA 的狀態。CE 上的這個短脈沖節省了一些能量,這在超低功耗應用中確實很重要。
接收(RX模式)的情況略有不同,因為我們要等待比較長的一段時間才能接收到一些數據。在 CE/CSN 上執行 10us 的短脈沖是不夠的。一種選擇是將 CE/CSN 保持高電平一段所需的時間。在此期間,我們無法使用 SPI 訪問 nRF24。這個問題可以通過在發送端設置足夠多的重傳、超時和消息確認屬性來緩解。應配置 SPI 事務讀取狀態寄存器的持續時間短于整個傳輸會話(包括重新傳輸)。該程序將采取以下步驟:
- 1 -> 5 -> 1
此解決方案適用于主要用于傳輸的設備,但對于預期設備永久處于接收器模式的情況效果較差。對于這種情況,不合并 CE 和 CSN 可能更有效。相反,將 CE 拉至 Vcc(高電平)將使 ATtiny13A 無需關閉無線電即可匯集新消息。
配置 2:3 線 SPI
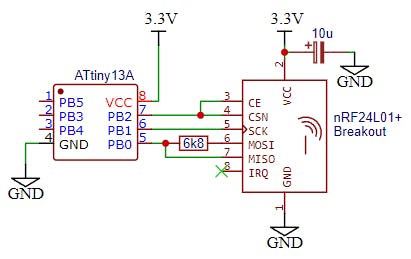
這個想法是通過一個電阻將 SPI 數據信號 MOSI 和 MISO 合并為一個,如下圖所示:
這不是一個新想法,在各種設計中相對常見,以減少信號的數量。nRF24 模塊會在這樣的信號合并下正常工作嗎?此圖中顯示了 SPI 與文檔中的 nRF24 模塊的通信:
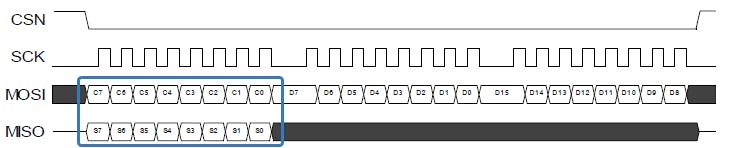
我們看到nRF24使用MISO發送狀態字節,而主控(MCU)向模塊發送命令,即全雙工通信。之后,MISO 線下降,僅在主 (MCU) 請求讀取操作時使用。兩個信號之間唯一可能的干擾是在開始時可能會破壞命令字節(在 MOSI 線上)。幸運的是,這種“沖突”是通過電阻解決的。其值應保證信號源/漏極不跨越 MCU 和模塊的引腳特性。在我們的案例中,從 4.7k 到 10k 的值運行良好。
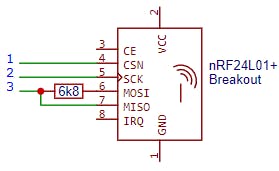
合并的 MISO/MOSI 節省了一個可用于直接控制 CE 的引腳。如果需要,可以將此配置與第一個配置混合使用 - 共享 CE/CSN,如下圖所示:
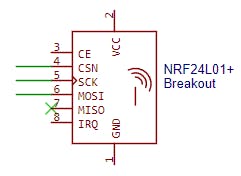
配置 3:單向 SPI
這種配置降低了 MISO(主輸入,從輸出)線,使其成為 3 線 SPI,即減少了一個引腳數。我們可以將數據寫入 nRF24 模塊,但我們將無法讀取它們:
它可能非常嚴格,但適用于某種類型的無線應用程序 - 設備專門用作數據源(測量),它不接收來自其他設備或網關(中央集線器)的數據。如果我們可以有一個 3 線 SPI 來節省相同數量的引腳,為什么我們還需要單向 SPI?有兩個原因:
- 我們還希望最大限度地減少組件數量/成本和/或 PCB 尺寸和復雜性。
- 減少驅動程序的內存占用,從而為傳感器驅動程序和應用程序邏輯留下一些寶貴的空間。ATtiny13A 只有 1KiB 的閃存。
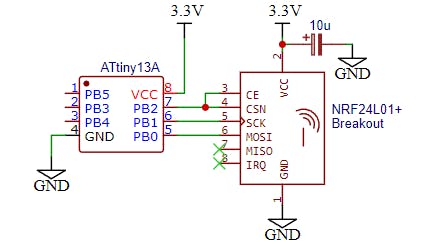
我們可以將此配置與第一個配置(共享 CE/CSN)相結合,以進一步優化 MCU 所需的引腳數,如下圖所示:
庫配置
代碼在 C ( nRF24L01.c) 和匯編程序 ( nRF24L01_asm.S) 中都實現。頭文件nRF24L01.h包含重要的常量和 API 函數的聲明。默認情況下,該庫使用全 4 線 SPI 和獨立的 CE 和 CSN 信號。通過在文件中定義相應的宏來配置庫以使用上述硬件選項之一。projdefs.h
#define NRF24L01_SHARED_CE_CSN // For shared CE/CSN configuration
此宏可以與以下任一(或無)組合:
#define NRF24L01_3WIRE_SPI // If used 3-wire SPI (with resistor)
#define NRF24L01_DO_NOT_USE_MISO // Uni-directional configuration
如果上述三個宏均未定義,則假定為默認配置。
定義連接到哪些端口 nRF24 信號也通過projdefs.h標頭中的宏完成。引腳配置宏是:
// MANDATORY macros for port output, port direction and pin reading:
#define NRF24L01_PORT PORTB
#define NRF24L01_DDR DDRB
#define NRF24L01_INPORT PINB
為特定的引腳配置定義以下宏(如果適用 - 請參閱上面的功能):
#define NRF24L01_CE PB0 // Optional. Do not define if shared CE/SCN is enabled
#define NRF24L01_CSN PB2 // Mandatory
#define NRF24L01_SCK PB1 // Mandatory
#define NRF24L01_MOSI PB3 // Mandatory
#define NRF24L01_MISO PB4 // Optional. Define only if 4-wire SPI is used.
API
API 只有 8 個(或 6 個,如果是單向的)方法。必須調用的第一個函數是初始化:
void nrf24_init(void);
其余功能根據 SPI 事務的長度進行拆分。零字節命令通過以下方式調用:
void nrf24_cmd(uint8_t cmd);
參數是文檔表 16 中的“命令字” ,例如:FLUSH_TX, FLUSH_RX, REUSE_TX_PL. 為方便起見,頭文件包含所有命令代碼的定義。
使用一個數據字節調用命令(通常寫入寄存器):
void nrf24_writeReg(uint8_t cmd, uint8_t value);
如果我們沒有單向 SPI 配置,我們也可以讀取寄存器:
uint8_t nrf24_readReg(uint8_t cmd);
參數 cmd 包含作為單個字節的復合寄存器地址:如果讀取,則為 1 并且00wAAAAA是寄存器地址(第 9 章 - 寄存器映射)。wAAAAA
寫入 TX 緩沖區和多字節寄存器:
void nrf24_writeRegs(uint8_t cmd, const uint8_t *buff, uint8_t size);
如果我們不使用單向 SPI 配置,讀取緩沖區的函數:
void nrf24_readRegs(uint8_t cmd, uint8_t *buff, uint8_t size);
參數列表是不言自明的。最后一組 API 函數用于在一段時間內“切換”CE 信號:
void nrf24_pulseCE(void);
這將在 CE 上產生大約 15us 的脈沖。該功能用于在無線電通電且 TX 緩沖區充滿數據后切換到 TX 模式。
為了使 CE 保持較高的持續時間(通常在使用共享 CE/CSN 配置時用于 RX 模式),應使用以下函數:
void nrf24_pulseCE_ms(uint16_t milliseconds);
如果我們不與 CSN 共享 CE(單獨連接),則由應用程序邏輯來控制 CE 引腳。
例子
該庫的存儲庫在main.c文件中包含一個工作示例,用于通過 nRF24L01 驅動程序發送和接收 32 位序列號。
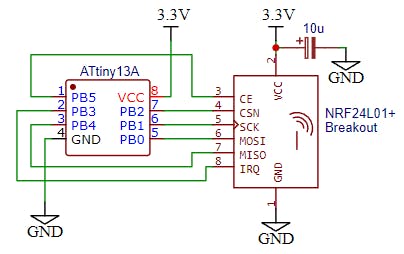
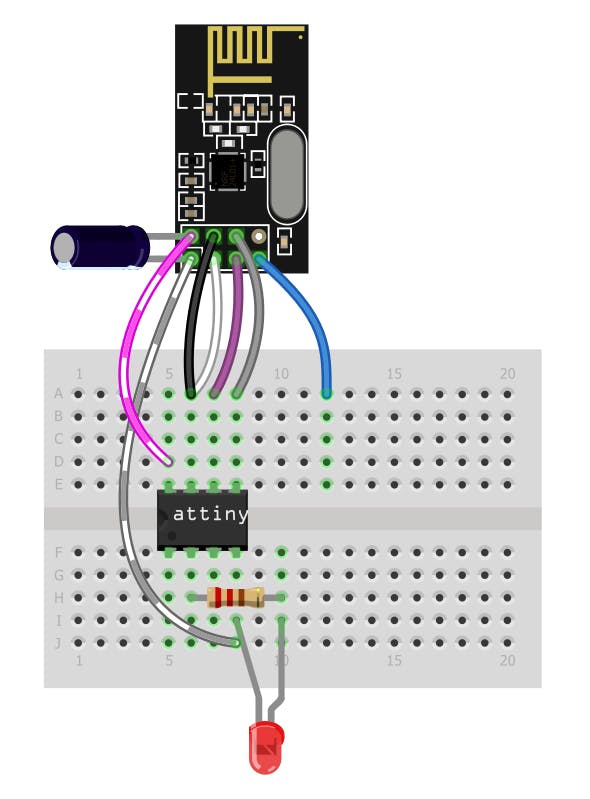
帶 ATtiny13A 的發射器
發射器結合了第一個(共享 CE/CSN)和第三個(單向)硬件配置。這占用了 MCU 上的 3 個引腳,剩下 2 個(如果沒有 RST,則為 +1)用于其他設備/傳感器/應用程序。在我們的例子中,我們將一個紅色 LED 連接到 PB3:
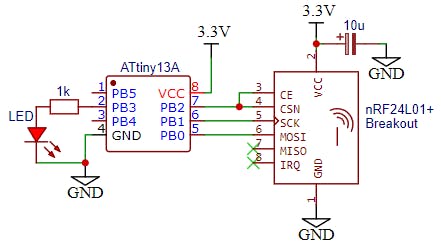
應用程序每 2 秒遞增一次,并向通道 120 上的管道 0 發送一個 32 位無符號整數。LED 亮起 800 毫秒以指示周期的開始。源代碼展示了從對講機上電、配置模塊、將數據移入緩沖區、傳輸和對講機電源的整個過程。
包括為 nRF24 設計的庫在內的發射器應用程序的總體占用空間為372 字節(可用 1KiB)和 6 字節 SRAM(共 64 字節)。
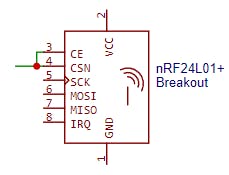
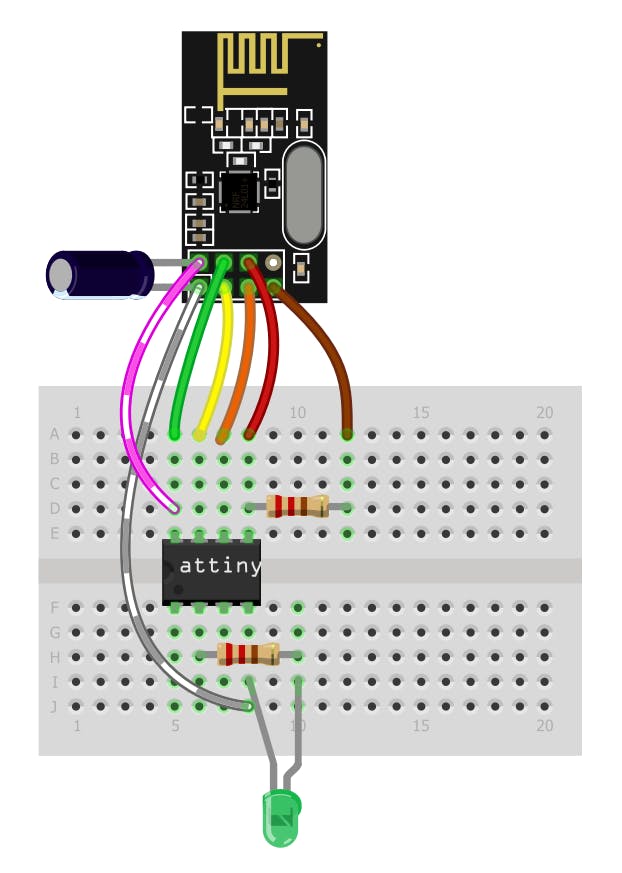
帶 ATtiny13A 的接收器
接收器應用程序不使用共享 CE/CSN,因為該模塊僅在 RX 模式下工作并且不傳輸數據(確認數據包除外)。為了優化引腳數,我們應用了總共占用 3 個 MCU 引腳的 3 線 SPI:
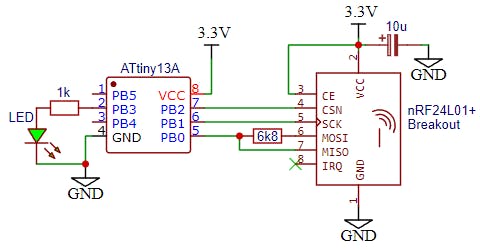
應用軟件每 100 毫秒匯集一次狀態寄存器以獲取新數據包。如果數據包到達,則將其讀入 MCU,并清除狀態。如果接收到的序列號與前一個序列號的增量相同,則綠色 LED 亮 1 秒。
包括為 nRF24 設計的庫在內的接收器應用程序的總體占用空間為420字節(可用 1KiB)和 6 字節 SRAM(共 64 字節)。
運行演示應用程序
同時運行發射器和接收器:
如果接收器接收到預期的序列號,接收器的 LED(綠色)將亮起 1 秒。紅色 (TX) 和綠色 (RX) LED 之間的最大延遲約為 100 毫秒,這是由 RX 側的池化引起的。
概括
提議的 nRF24 庫的主要目標和成就是:
- 最小化管腳數:它支持三種通用管腳優化硬件配置(與此共享 CE 不同),不需要或單個電阻器(與Nerd Ralph 的解決方案不同)。nRF24 模塊在 MCU 上僅占用 3 個引腳而不是 6 個。這留下了其他 2 個引腳(如果 RST 用作 IO,則為 +1)用于連接傳感器或現場總線。
- 最小化功耗:專為超低功耗應用而設計。通過極少指令的優化庫實現節能。這減少了整體執行時間。與其他類似方法(共享 CE/CSN 與 CE 永久激活)相比,引腳數最小化的方式為 nRF24 模塊提供更好的能量管理。
- 最小化庫的占用空間:非常低的占用空間 - 演示應用程序有372 字節(發送器)和 420 字節(接收器),包括應用程序的邏輯。它可以輕松裝入 ATtiny13A 并為其他應用程序和連接的設備和現場總線留出足夠的空間。它可配置為半雙工或單工無線電通信,以進一步最小化占用空間。與其他通用庫不同,它還可以部署在 ATtiny 子系列中具有相同或更大內存的任何其他 MCU 上。SPI 接口實現為bit-banging,因此不依賴于通用串行接口 (USI)等外圍設備。
然而,實現給定的目標需要付出一定的代價。API 提供的低粒度方法不如RF24 庫或類似庫中的高級方法方便。
- 使用NRF24L01和Arduino構建無線傳感器網絡
- nRF24L01帶ATtiny85 3針開源分享
- 使用nrf24l01和傳感器的WSN技術發送數據
- 帶有ATTINY13A微控制器的PCB
- nRF24L01無線通信模塊使用簡介
- 單片無線收發器芯片NRF24L01 PCB原理圖下載 0次下載
- nRF24L01單芯片2.4GHz收發器產品規格書 25次下載
- NRF24L01的模塊資料和C語言程序和使用與開發攻略合集免費下載 41次下載
- NRF24L01和單片機2.4GHz收發器產品規范免費下載 6次下載
- nRF24L01無線模塊使用教程之經典使用程序詳細資料合集免費下載 153次下載
- nRF24L01相關知識詳述 27次下載
- NRF24L01程序 25次下載
- NRF24l01 程序 34次下載
- NRF24L01編程心得 0次下載
- nRF24L01 pdf datasheet (Single
- stm32 24l01按鍵 改 發射頻率 3242次閱讀
- 微雪電子NRF24L01 RF Board 2.4G無線模塊簡介 2827次閱讀
- 如何通過STM32驅動nRF24L01發送數據 7654次閱讀
- 如何將芯片設置為發射模式(NRF24L01為例) 3682次閱讀
- 基于nRF24L01的無線USB控制系統 4684次閱讀
- 基于STM32F103和nRF24L01的近程無線數傳系統設計 2622次閱讀
- 基于STC89C52和nRF24L01的智能小車設計 8250次閱讀
- 一種DSP和nRF24L01的無線環境監測系統的設計 2356次閱讀
- nrf24l01無線模塊傳輸距離分析 3.4w次閱讀
- 基于BOA和nRF24L01的智能家居系統 2676次閱讀
- 無線模塊nrf24l01中文資料_引腳圖及引腳定義_電路原理及實例 18.6w次閱讀
- 基于STM32F103和nRF24L01的近程無線數傳系統設計 3146次閱讀
- nRF24L01無線模塊的傳輸速度及距離 3.6w次閱讀
- nRF24L01寄存器地址與說明 1.1w次閱讀
- nRF24L01主要參數及電路圖 2.4w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數據手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網監
工商網監
評論