 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
描述
介紹
與上一個(gè)項(xiàng)目類似,我們將連接一個(gè)可以測量距離的傳感器,但我們不使用超聲波,而是使用波長為 905 nm 的脈沖激光形式的光。與超聲波傳感器相比,LiDAR-Lite 模塊每秒可提供更好的準(zhǔn)確度、精度、范圍和更多數(shù)據(jù)樣本。LiDAR 系統(tǒng)通常用于自動(dòng)駕駛汽車、無人機(jī)和衛(wèi)星以繪制地形圖。
16x2 字符 LCD
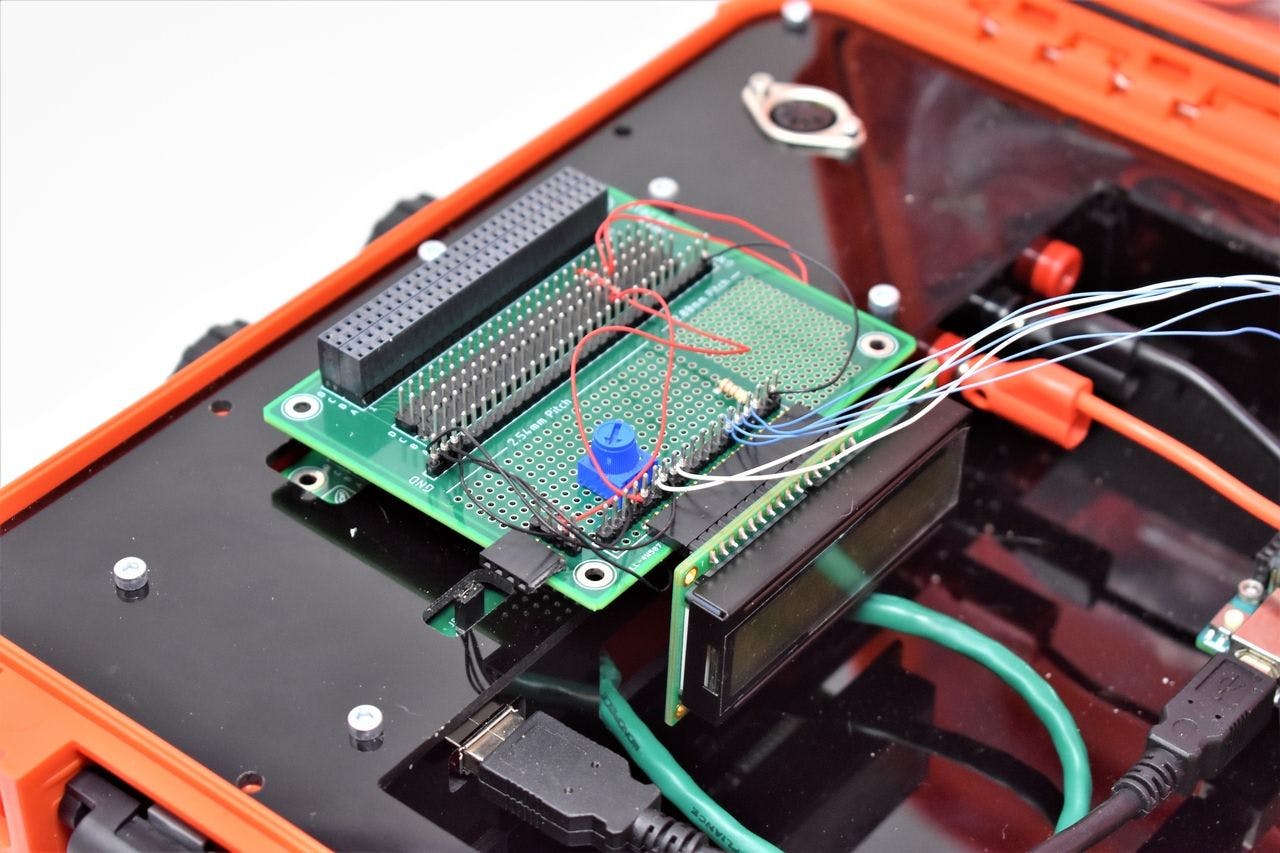
有關(guān)如何以 4 位模式連接 16×2 LCD 的更多詳細(xì)信息,請(qǐng)參見項(xiàng)目 9 。您應(yīng)該將 LCD 的引腳 4、6 和 11-14 分別連接到 Uno 引腳 2、3 和 4-7。LCD 通過焊接到 1 對(duì) 1 鏈路的 16 針直角母頭安裝到 Modulus Canister,如下圖所示。您也可以使用無焊面包板來安裝 LCD。
我們正在將 LiDAR 安裝到 Adapticon Canister。如果您也這樣做,則必須移除 Modulus 上的 F/M 跳線,并將 30 AWG 線繞到公頭針上。這樣我們就可以將 Modulus 和 Adapticon 堆疊在一起。
Garmin LiDAR-Lite
LiDAR 代表“光檢測和測距”,并通過激光測量距離。激光是一種脈沖光源,其波長范圍從紫外線到可見光再到紅外線。它們的功率也各不相同——一些是 mW 激光器(指針),而另一些則可能超過 500W(用于切割)。這個(gè)特殊的模塊有一個(gè)工作在 905nm 波長和 1.3 瓦功率的激光器。LiDAR-Lite 發(fā)射激光信號(hào)并測量激光從目標(biāo)反射回來后返回所需的時(shí)間。一旦獲得時(shí)間,就可以計(jì)算距離,因?yàn)槲覀冎罆r(shí)間和光速。模塊進(jìn)行此計(jì)算并通過 I2C 返回到主機(jī)的距離。
如果您在 PWM 模式下使用模塊,它會(huì)返回一個(gè)與測量距離成正比的高脈沖寬度。
注意:此模塊發(fā)射激光輻射,被指定為 1類激光。對(duì)于 1 類激光,應(yīng)采取所有預(yù)防措施。
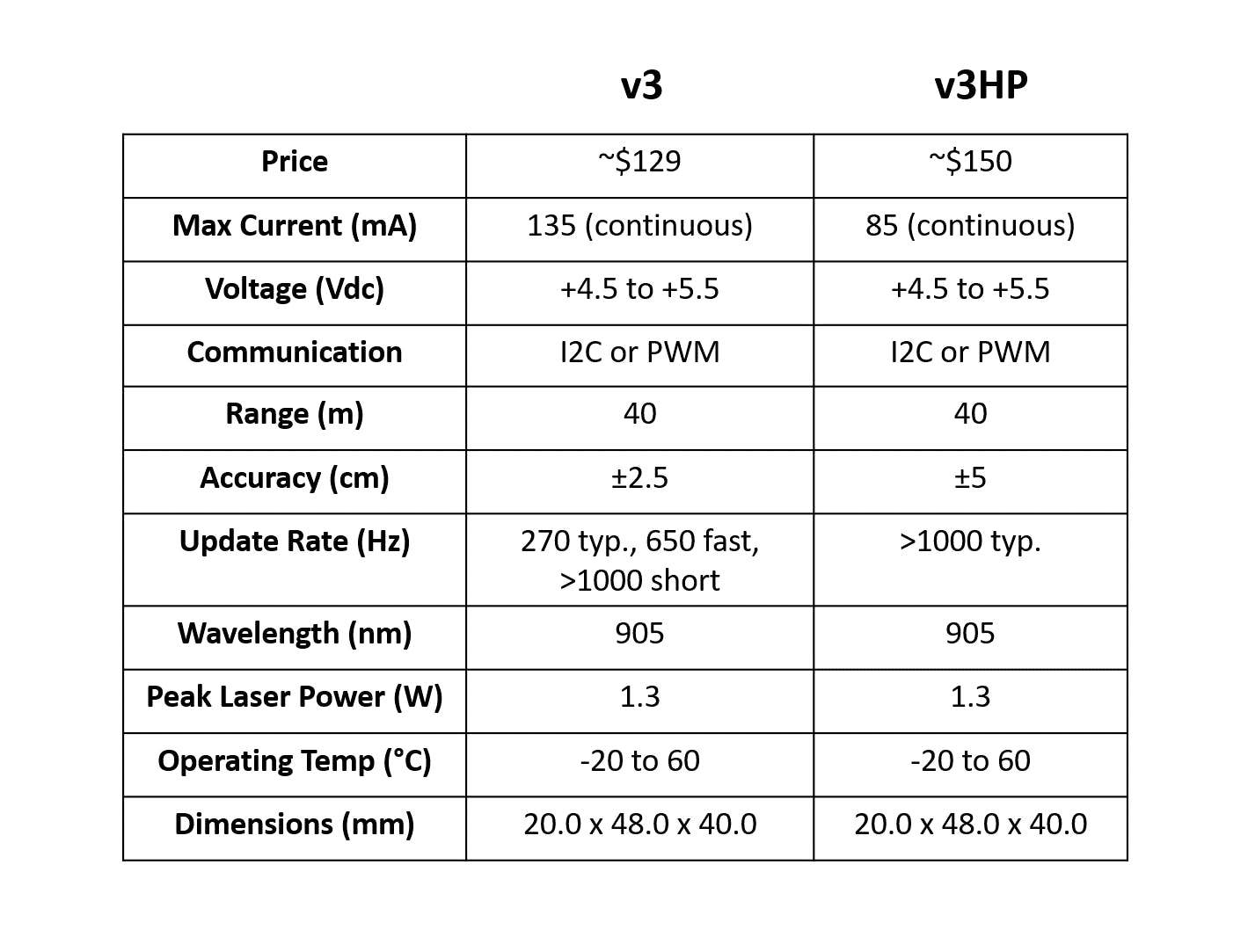
LiDAR-Lite 模塊由 6 個(gè)引腳組成:+5V、電源 EN、模式控制、I2C SCL、I2C SDA 和 GND。該模塊可以在兩種模式下運(yùn)行:I2C(內(nèi)部集成電路)和 PWM(脈寬調(diào)制)。我們將在 I2C 模式下操作模塊。Garmin 提供兩種型號(hào):LiDAR-Lite v3 和 LiDAR-Lite v3HP。我們使用的是 LiDAR-Lite v3,因?yàn)樗阋恕?/font>規(guī)格表如下所示,Garmin 的完整數(shù)據(jù)表可在此處找到。
內(nèi)部集成電路 (I2C)
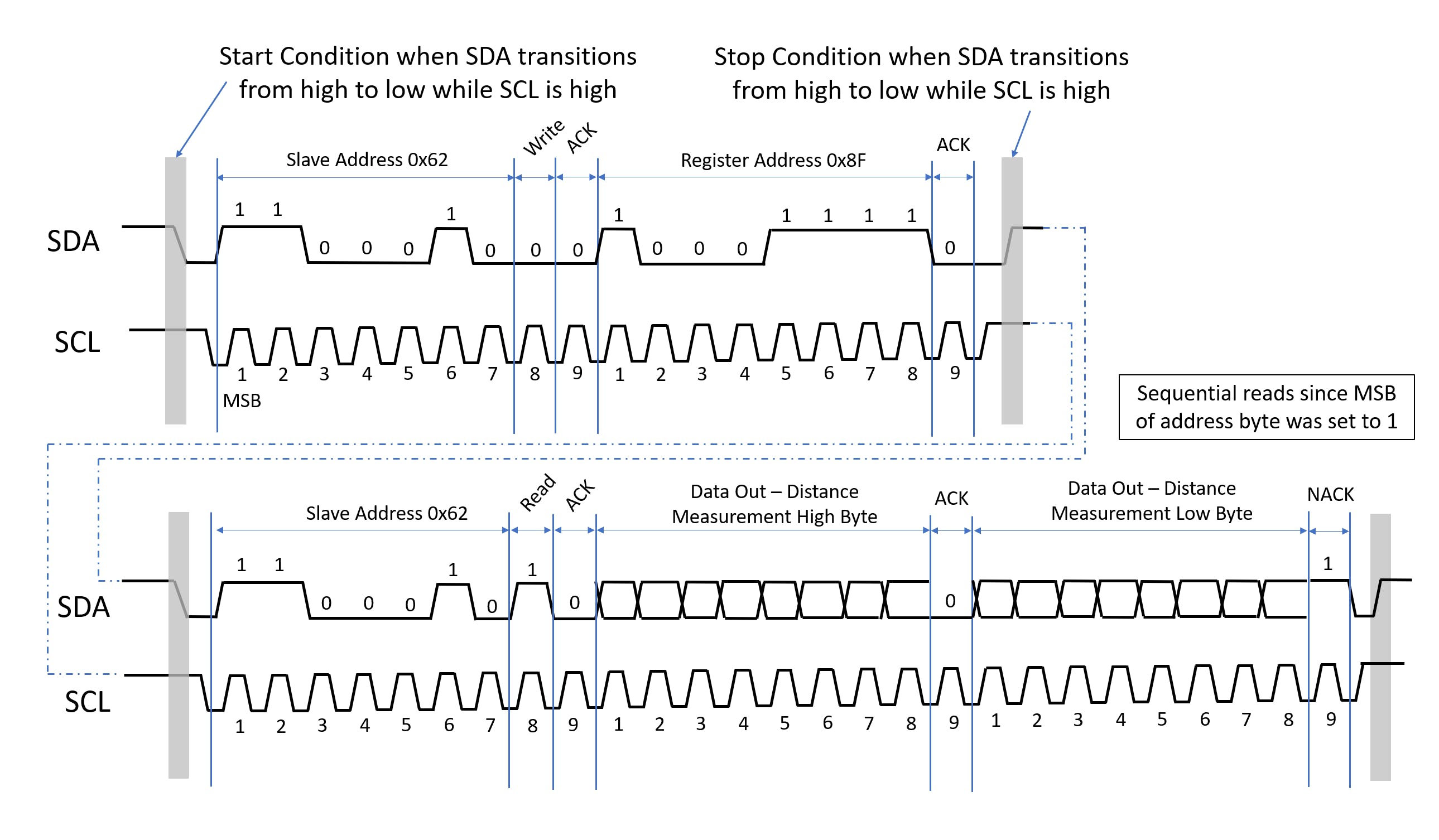
我們將在 I2C 模式下使用該模塊。由于我們只使用一個(gè)模塊,我們不必更改其默認(rèn)的 7 位從地址,即 0x62。即使我們只有一個(gè)從設(shè)備,主設(shè)備 (Uno) 仍必須將地址發(fā)送給它想要與之通信的從設(shè)備。除了地址之外,還有一個(gè)讀/寫位告訴從機(jī)主機(jī)是否要讀取或?qū)懭胨?/font>
從 LiDAR-Lite 獲取距離測量值的最簡單方法是:
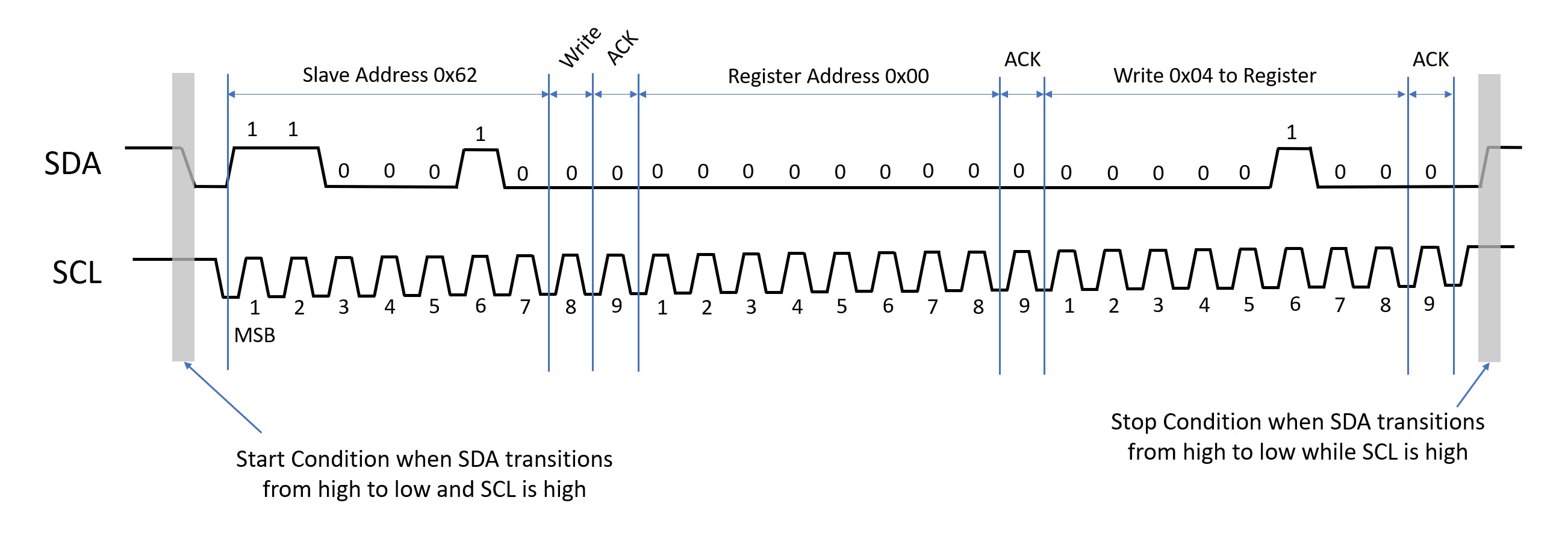
- 主機(jī)寫入 0x62 來尋址從機(jī)并等待從機(jī)的確認(rèn) (ACK) 位。
- 主機(jī)將 0x04 寫入從機(jī)寄存器 0x??00。LiDAR-Lite 的寄存器 0x??00 是Receiver Bias Correction 。將 0x04 寫入此寄存器會(huì)告訴設(shè)備您要使用接收器偏差校正進(jìn)行距離測量。
- 主機(jī)讀取 0x01 寄存器,指示 LiDAR-Lite 的系統(tǒng)狀態(tài)。如果位 0 (LSB) 為 1,則設(shè)備忙。如果它是零,那么我們可以繼續(xù)獲得距離測量值。
- 通過將地址字節(jié)的 MSB 設(shè)置為 1,我們可以通過連續(xù)讀取或?qū)懭胗|發(fā)寄存器地址的自動(dòng)遞增。我們要讀取寄存器 0x??0F 中的距離測量的高字節(jié),因此通過將 MSB 設(shè)置為 1,該地址變?yōu)?0x8F。通過發(fā)送 0x8F,主機(jī)接收到高字節(jié)距離測量和低字節(jié)距離測量。
上述步驟的時(shí)序圖如下所示。
?
?
適配圖標(biāo)
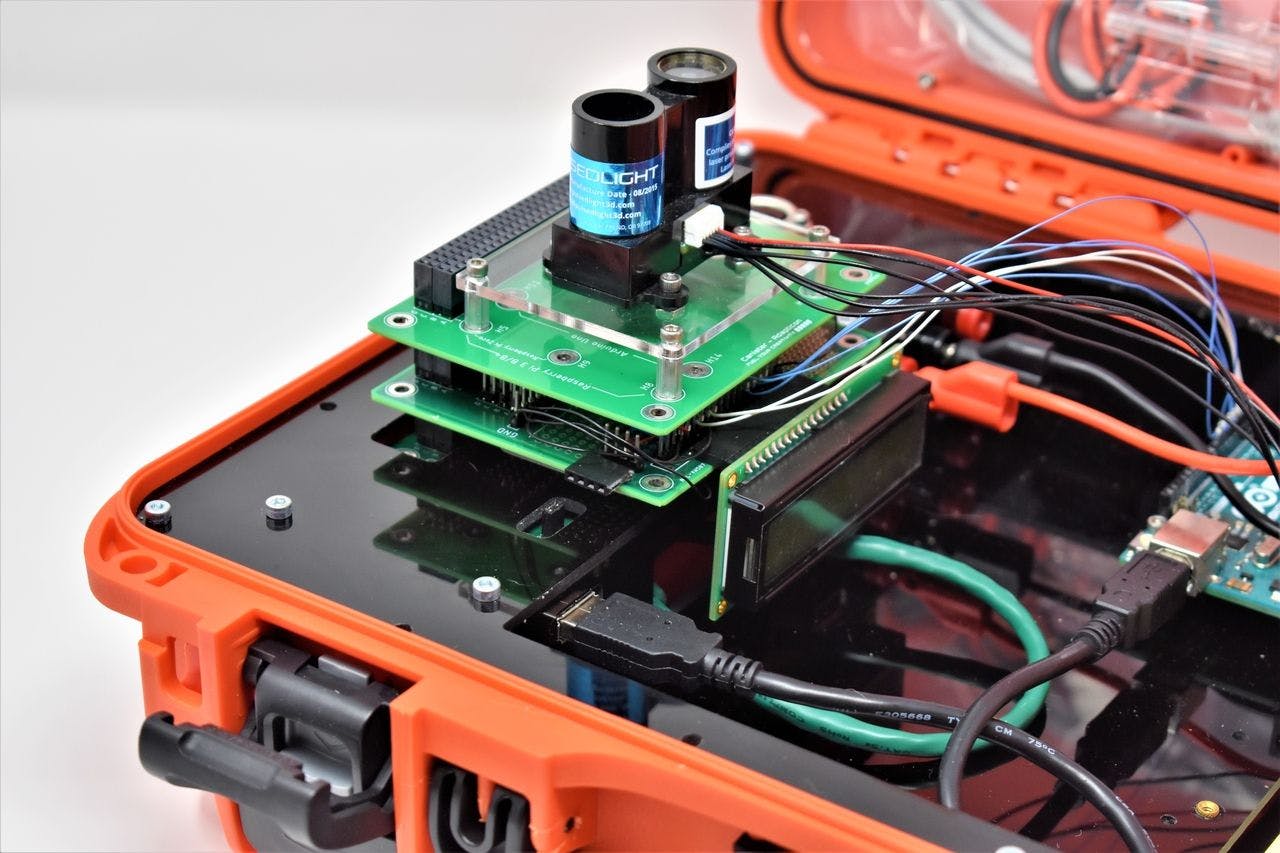
我們正在使用 Adapticon 安裝 LiDAR-Lite。Adapticon 有安裝 Raspberry Pi 3 Model B/B+、Raspberry Pi 4、Raspberry Pi Zero 和 Arduino Uno Rev3 的腳印,因此我們創(chuàng)建了一個(gè)適配器板(由 1/8 英寸丙烯酸制成),可安裝到 RPi3足跡,以便能夠安裝 LiDAR-Lite。在將板安裝到 Adapticon 之前,我們必須使用四個(gè) #4-40 x 3/8" 內(nèi)六角螺釘和四個(gè) #4 六角螺母將 LiDAR-Lite 安裝到板上。下圖顯示了 LiDAR-Lite 安裝在板上的圖像。

將 LiDAR-Lite 安裝到板上后,我們可以使用提供的六角支架和 #4-40 x 1/4" 內(nèi)六角螺釘將其固定到 Adapticon。最終組裝如下所示。

罐堆棧
接下來,我們需要將 Modulus 和 Adapticon 連接在一起。建議您先將 Modulus 連接到 Adapticon(如下圖所示),而不是將 Modulus 插入 FuelCan 的 4×26 針連接器,然后再插入 Adapticon。

將兩個(gè)罐子配對(duì)后,小心地將電池組插入 FuelCan 的 4×26 針連接器,然后插入 LiDAR-Lite 的線束,如下圖所示。
LiDAR-Lite 接線
線束一側(cè)有一個(gè) JST 母接頭,另一側(cè)有剝線端。您可能需要在電線的末端鍍錫,這樣當(dāng)您將末端插入面包板時(shí)它不會(huì)彎曲。將無焊面包板放入底部儲(chǔ)物箱中,并將每個(gè)剝離端插入面包板上的相鄰節(jié)點(diǎn)。在模塊的引腳 1 和 6(分別為 5Vdc 和 GND)之間放置一個(gè)極化的 680uF 電解電容器。確保電容器的方向正確,否則在給設(shè)備加電時(shí)可能會(huì)損壞或爆炸。
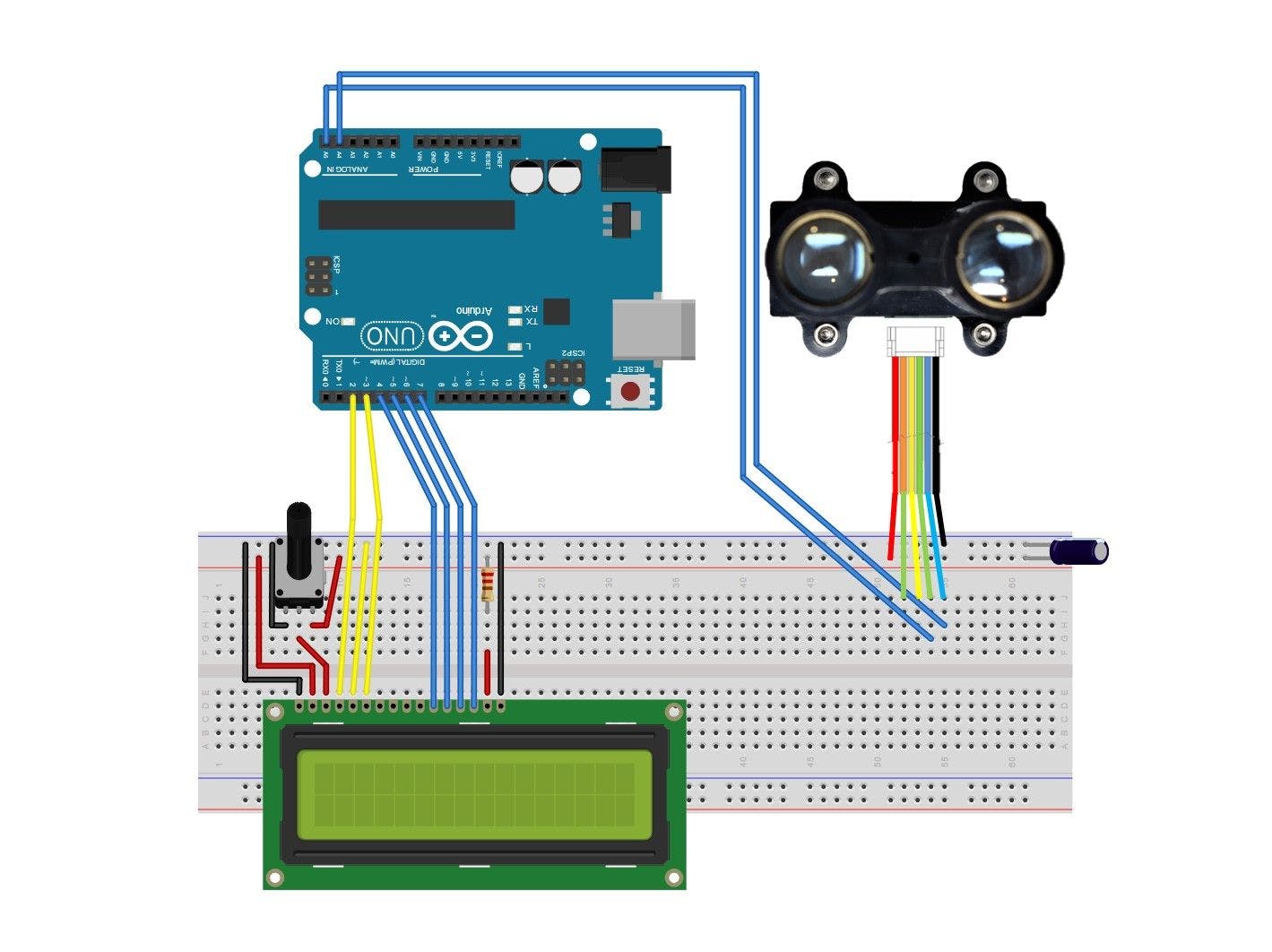
使用 8 英寸 M/M 跳線將 LiDAR-Lite 引腳 4 (I2C SCL) 和 5 (I2C SDA) 分別連接到引腳 A5 和 A4 中的 Uno 模擬。LiDAR-Lite 引腳 2 和 3 連接到面包板,但它們沒有連接到任何東西——引腳 2 有一個(gè)內(nèi)部上拉電阻以始終啟用設(shè)備,而引腳 3 未連接,因?yàn)槲覀兪褂玫氖?I2C 模式。電路原理圖如下所示。
燃料罐接線
如果您還沒有將 Uno 安裝到 FuelCan 的原型制作區(qū)域,請(qǐng)繼續(xù)執(zhí)行此操作。如果您使用的是面包板而不是 Modulus,請(qǐng)將面包板放在底部的儲(chǔ)物箱中以限制跳線的長度。您需要使用提供的香蕉插孔來測試引線夾電纜,為面包板上的電源和接地軌提供 +5V 和 GND。您將需要兩個(gè)公頭針將測試引線夾安裝在面包板一側(cè)。將 USB 電纜的 A 型端插入 USB1 插座,將 B 型端插入 Uno 的插座。使用 AC-DC 電源適配器為 FuelCan 供電。
軟件
一旦接線完成并且 FuelCan 通電,我們現(xiàn)在可以將草圖加載到 Uno 上。您將需要 Garmin 的 LiDAR-Lite 庫,該庫可在此處獲得。它會(huì)將您定向到他們的 GitHub 存儲(chǔ)庫。
下載庫后,通過導(dǎo)航到Sketch -> Include Library -> Add.ZIP Library...將其添加到您的 Arduino IDE 。您還可以通過轉(zhuǎn)到Sketch -> Library Manager并搜索“LIDAR”來安裝該庫。當(dāng)搜索結(jié)果彈出時(shí),安裝 Garmin 庫的 LIDAR-Lite。
下面的第一個(gè)草圖在沒有接收器偏差校正的情況下獲取距離測量值,其中不考慮目標(biāo)距離、設(shè)備溫度或光學(xué)噪聲。不使用接收器偏差校正的一個(gè)優(yōu)點(diǎn)是您可以更快地獲取距離測量值。但是,準(zhǔn)確性和靈敏度會(huì)受到影響。
下一個(gè)草圖(下圖)定期執(zhí)行接收器偏差校正。建議每 100 個(gè)連續(xù)測量命令執(zhí)行一次。通過使用接收器偏差校正,提高了準(zhǔn)確性和靈敏度。但是,獲取距離測量值較慢。
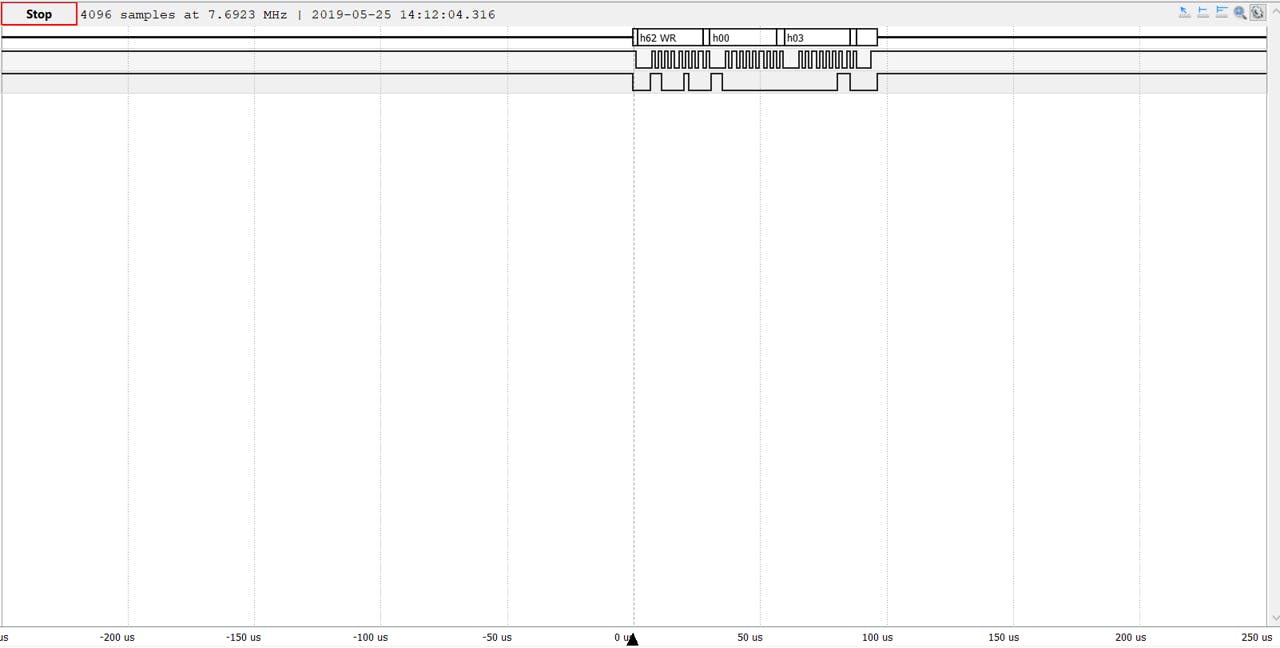
數(shù)字波形
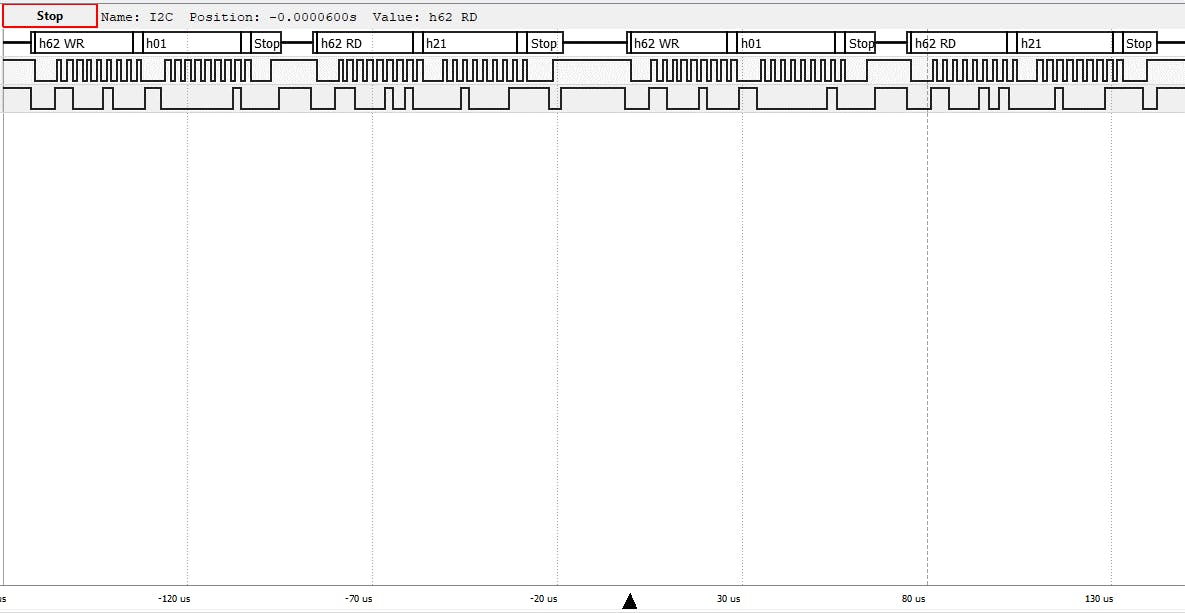
數(shù)字波形是在 SCL 和 SDA 線上采集的。第一個(gè)波形(下圖)顯示主機(jī)與從機(jī)通信,它希望將 0x03(無接收器偏置校正)寫入從機(jī)寄存器 0x??00。
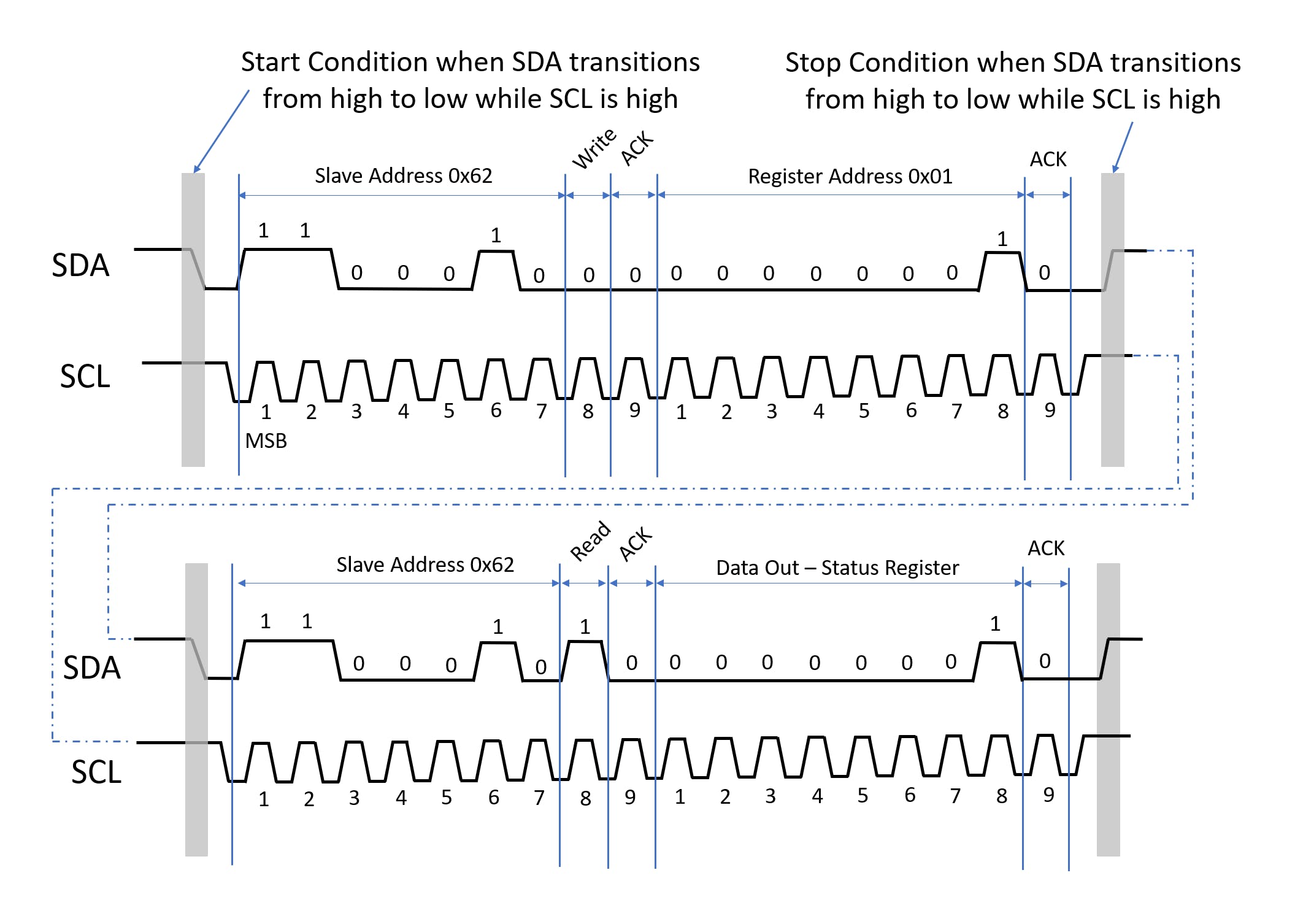
第二個(gè)波形(下圖)顯示主機(jī)輪詢從機(jī)狀態(tài)寄存器 0x??01,直到位 0 為零。您可以看到狀態(tài)寄存器被讀取了兩次,因?yàn)槲?0 為 1。
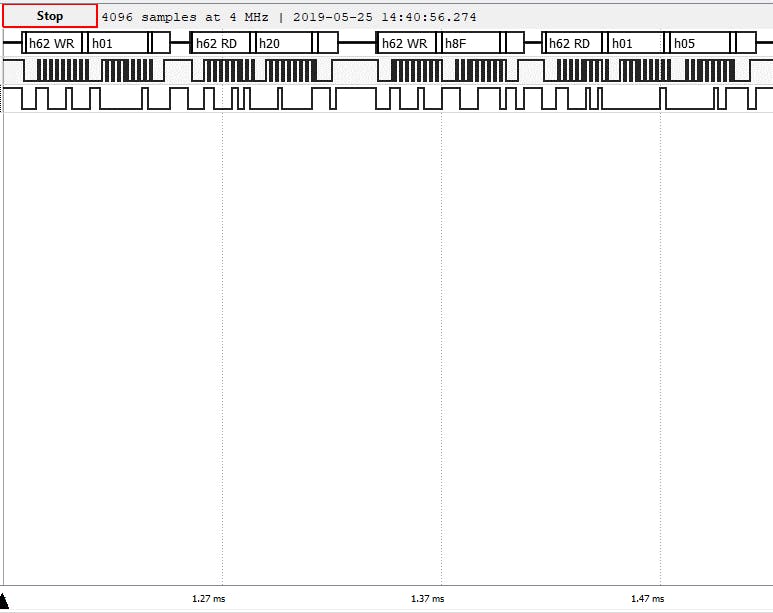
第三個(gè)波形(下圖)顯示主機(jī)輪詢從機(jī)狀態(tài)寄存器 0x??01,直到位 0 為零。第二次輪詢從屬寄存器時(shí),位 0 為零,因此主機(jī)能夠繼續(xù)從從屬設(shè)備檢索距離測量值。主機(jī)發(fā)送 0x8F 用于連續(xù)讀取從機(jī)寄存器 0x??0F 和 0x10。在最后一幀中,從機(jī)分別從寄存器 0x??0F 和 0x10 發(fā)送兩個(gè)字節(jié)的數(shù)據(jù),0x01 和 0x05。
?
- USB供電模塊開源
- 藍(lán)牙模塊開源分享
- XBee射頻模塊開源分享
- Amanero顯示模塊開源分享
- HHKB Lite 2 Teensy 2.0控制器開源
- DIY RTC模塊開源
- GPRS終端/模塊/modem使用Winsock控網(wǎng)絡(luò)編程 1次下載
- 開源網(wǎng)絡(luò)協(xié)議分析器WireShark軟件下載 15次下載
- EE-196:ADSP-BF535黑幕,EZ-KIT-Lite-Lite-PE-Lite-Lite-P
- 開源課程行動(dòng)倡議及科學(xué)導(dǎo)論綜述 6次下載
- 淺談LiDAR感應(yīng)器在iPhone 12 Pro上的應(yīng)用,將如何改變3D新聞內(nèi)容的生產(chǎn)資料下載
- 高通QCC5124藍(lán)牙模塊原理圖下載 21次下載
- 高通QCC5144藍(lán)牙模塊原理圖下載 17次下載
- Orange Pi Lite香橙派開發(fā)板的電路圖合集免費(fèi)下載 67次下載
- Orange Pi Lite的用戶手冊(cè)免費(fèi)下載 3次下載
- NVIDIA全面轉(zhuǎn)向開源GPU內(nèi)核模塊 253次閱讀
- 什么是LiDAR?LiDAR技術(shù)的新時(shí)代 前景廣闊未來可期 394次閱讀
- 激光雷達(dá)LIDAR基本工作原理 3767次閱讀
- VoxelMap++:在線LiDAR慣性里程計(jì)實(shí)現(xiàn)可合并的體素建圖方法 964次閱讀
- 應(yīng)用于機(jī)器人3D感知的高精度LiDAR與電機(jī)驅(qū)動(dòng)解決方案 770次閱讀
- 華為新版模擬器eNSP Lite安裝攻略 6675次閱讀
- 什么是LiDAR?LiDAR的工作原理 1w次閱讀
- LiDAR系統(tǒng)利用GaN的堅(jiān)韌 2446次閱讀
- 微雪電子樹莓派計(jì)算模塊擴(kuò)展板 CM3/3Lite/3/3+介紹 5268次閱讀
- 米爾科技Z-turn Lite IO Cape簡介 1124次閱讀
- 激光雷達(dá)LIDAR的工作原理及特點(diǎn)應(yīng)用分析 1.7w次閱讀
- 探討機(jī)械式LiDAR技術(shù)優(yōu)勢和發(fā)展現(xiàn)狀 4320次閱讀
- 固態(tài)LiDAR傳感器技術(shù)在智能交通系統(tǒng)中的應(yīng)用 1713次閱讀
- pSemi推出應(yīng)用于固態(tài)LiDAR的GaN FET驅(qū)動(dòng)器PE29101 6111次閱讀
- 詳細(xì)無人駕駛汽車的關(guān)鍵技術(shù)——LiDAR 1.6w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數(shù)據(jù)手冊(cè)
- 1.06 MB | 532次下載 | 免費(fèi)
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費(fèi)
- 3TC358743XBG評(píng)估板參考手冊(cè)
- 1.36 MB | 330次下載 | 免費(fèi)
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費(fèi)
- 5元宇宙深度解析—未來的未來-風(fēng)口還是泡沫
- 6.40 MB | 227次下載 | 免費(fèi)
- 6迪文DGUS開發(fā)指南
- 31.67 MB | 194次下載 | 免費(fèi)
- 7元宇宙底層硬件系列報(bào)告
- 13.42 MB | 182次下載 | 免費(fèi)
- 8FP5207XR-G1中文應(yīng)用手冊(cè)
- 1.09 MB | 178次下載 | 免費(fèi)
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 2555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33566次下載 | 免費(fèi)
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費(fèi)
- 4開關(guān)電源設(shè)計(jì)實(shí)例指南
- 未知 | 21549次下載 | 免費(fèi)
- 5電氣工程師手冊(cè)免費(fèi)下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費(fèi)
- 6數(shù)字電路基礎(chǔ)pdf(下載)
- 未知 | 13750次下載 | 免費(fèi)
- 7電子制作實(shí)例集錦 下載
- 未知 | 8113次下載 | 免費(fèi)
- 8《LED驅(qū)動(dòng)電路設(shè)計(jì)》 溫德爾著
- 0.00 MB | 6656次下載 | 免費(fèi)
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費(fèi)
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537798次下載 | 免費(fèi)
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費(fèi)
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費(fèi)
- 6電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191187次下載 | 免費(fèi)
- 7十天學(xué)會(huì)AVR單片機(jī)與C語言視頻教程 下載
- 158M | 183279次下載 | 免費(fèi)
- 8proe5.0野火版下載(中文版免費(fèi)下載)
- 未知 | 138040次下載 | 免費(fèi)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論