 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
描述
描述
理念
為兩電機(jī)后輪驅(qū)動(dòng)遙控車制作原型硬件。
構(gòu)建過程
第 1 步:組裝硬件
收集上面零件列表中列出的所有組件。
首先將 L293D H 橋放在面包板上,然后將 Builder Base 的 GND 和 5V 端口連接到面包板上的 GND 和 VCC 導(dǎo)軌。
現(xiàn)在,我們將 H 橋上的四個(gè) GND 引腳連接到面包板上的 GND 軌,并將 H 橋上的 Vcc1 和 Vcc2 引腳連接到面包板上的電源軌。
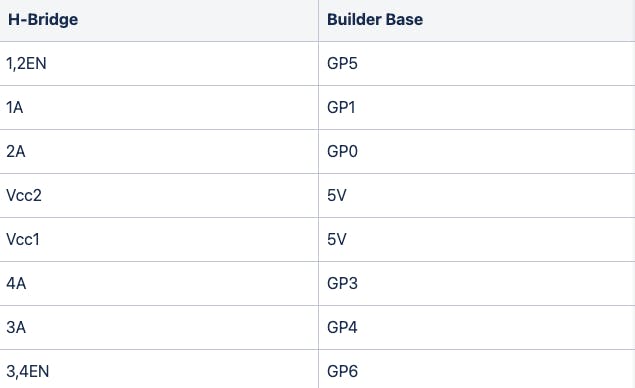
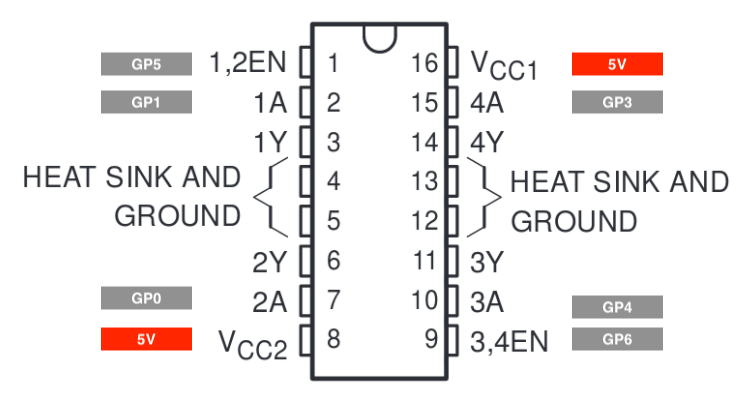
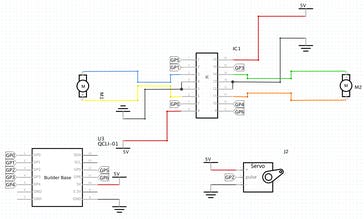
現(xiàn)在,在 H-Bridge 和 Builder Base 之間建立連接,如下圖和表格所示:
?
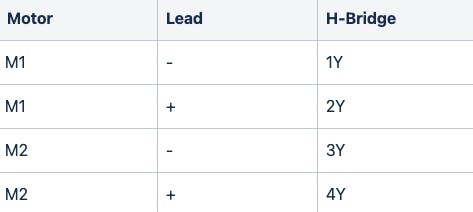
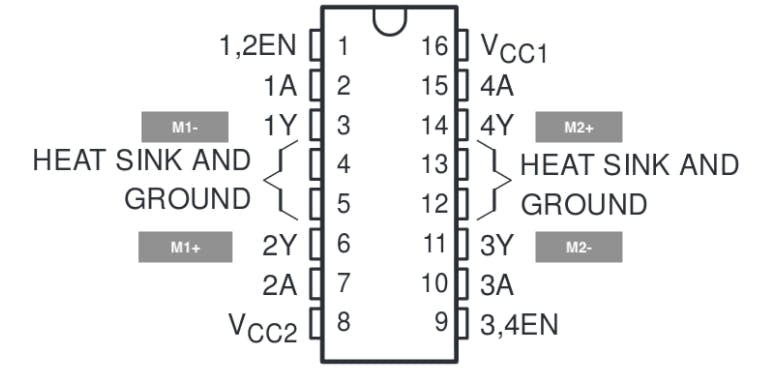
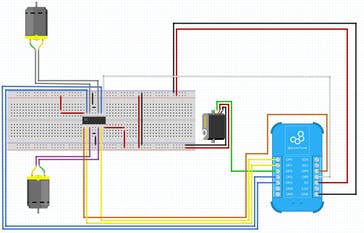
我們現(xiàn)在將電機(jī)連接到 H 橋,如下所示:
?
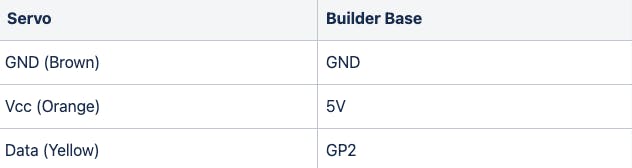
最后,我們將伺服連接到 Builder Base。
在大多數(shù) 9G 伺服器上,GND 引線是棕色的,Vcc 引線是橙色的,黃色引線是數(shù)據(jù),但在繼續(xù)之前請(qǐng)務(wù)必檢查特定伺服器的數(shù)據(jù)表。
首先從伺服器中取出 GND 和 Vcc 引線,并將它們連接到面包板上的 GND 和 Vcc 導(dǎo)軌。最后,將數(shù)據(jù)引腳連接到構(gòu)建器底座上的 GP2 端口。這是一個(gè)列出連接的表:
?
?
恭喜,該項(xiàng)目的硬件組裝完成!
第 2 步:構(gòu)建固件
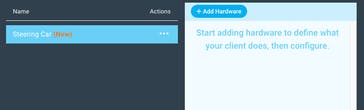
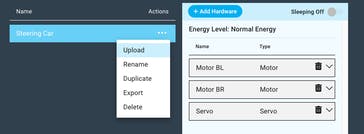
導(dǎo)航到固件生成器并創(chuàng)建一個(gè)新的固件文件。我們將其命名為轉(zhuǎn)向車。

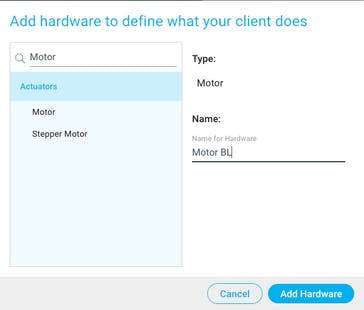
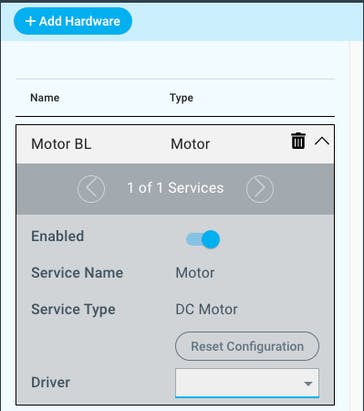
接下來,單擊“+添加硬件”按鈕,通過搜索欄找到電機(jī)設(shè)備,選擇它,命名,然后單擊“添加硬件”。我們將其命名為 Motor BL。
?
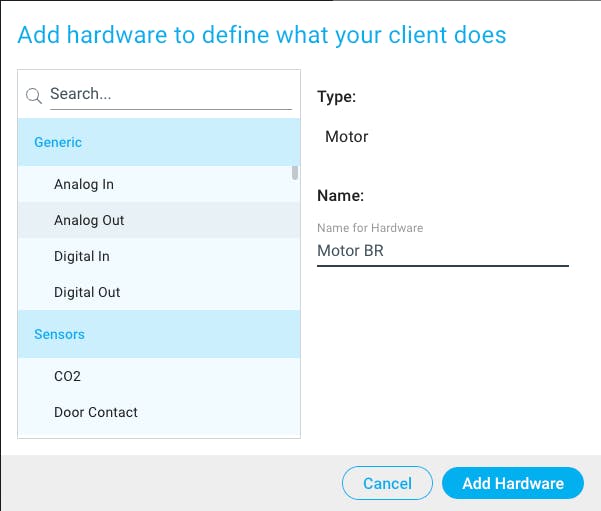
再次重復(fù)這些步驟,但這次將電機(jī)命名為:Motor BR。
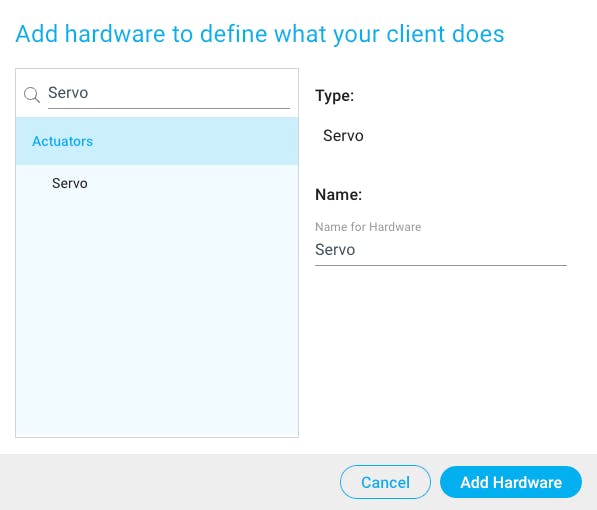
接下來,添加伺服。我們將其命名為伺服。
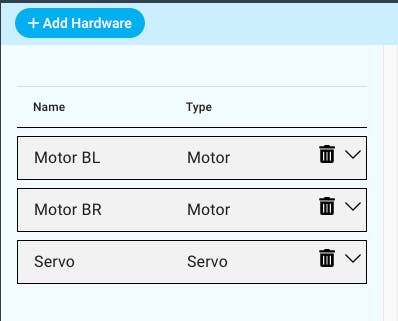
現(xiàn)在,您的設(shè)備列表中應(yīng)該有兩個(gè)電機(jī)和一個(gè)伺服。
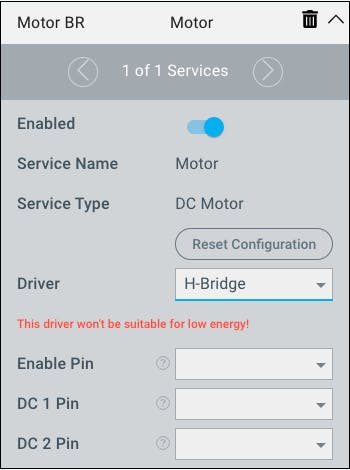
要為電機(jī) BL 設(shè)備配置驅(qū)動(dòng)程序,請(qǐng)從驅(qū)動(dòng)程序下拉菜單中選擇 L293D H-Bridge 驅(qū)動(dòng)程序。
?
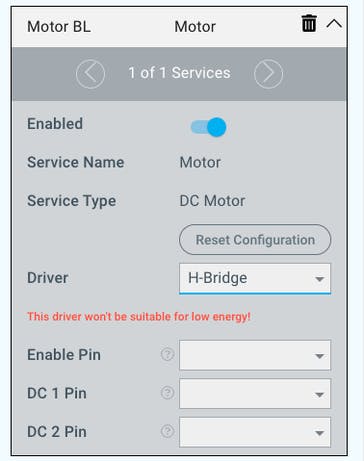
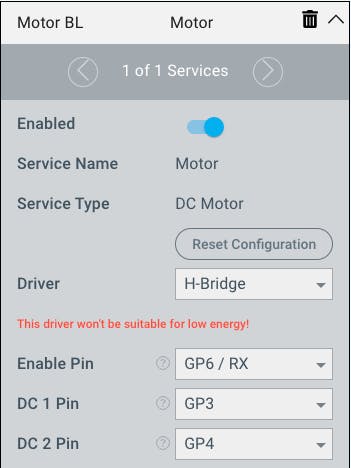
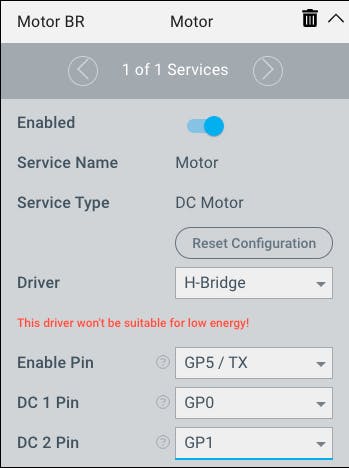
現(xiàn)在,按如下方式配置驅(qū)動(dòng)程序:

?
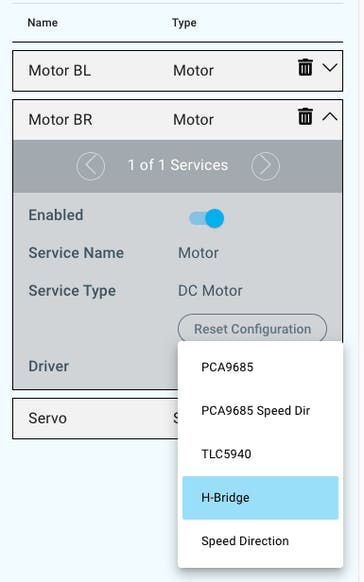
我們現(xiàn)在將配置 Motor BR 驅(qū)動(dòng)程序:
?
?

?
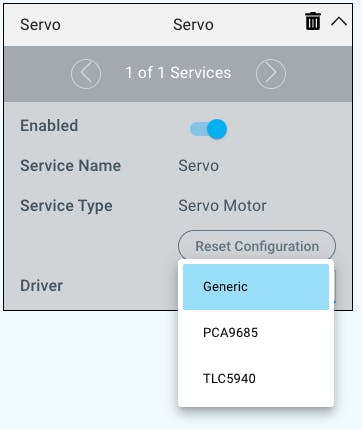
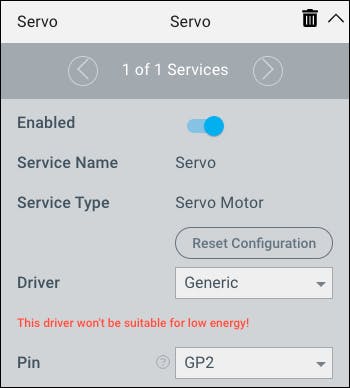
最后,我們將配置伺服驅(qū)動(dòng)程序。
從驅(qū)動(dòng)程序下拉菜單中選擇通用驅(qū)動(dòng)程序。
?
這就是固件!單擊屏幕底部的藍(lán)色“保存”按鈕保存文件。

現(xiàn)在您可以將固件上傳到您已連接到轉(zhuǎn)向車的客戶端。
第 4 步:構(gòu)建應(yīng)用程序
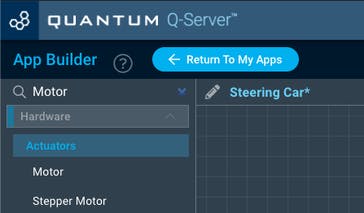
導(dǎo)航到應(yīng)用程序頁面并單擊“+ 創(chuàng)建新按鈕”,命名您的應(yīng)用程序,然后單擊創(chuàng)建。

您現(xiàn)在將被定向到 App Builder 畫布。
使用左側(cè)工具欄中的搜索欄搜索電機(jī)代碼對(duì)象并將其中兩個(gè)拖到畫布上。
像我們一樣命名電機(jī)對(duì)象。這將幫助您在應(yīng)用映射期間識(shí)別電機(jī)。要重命名它們,請(qǐng)單擊電機(jī)對(duì)象并在右側(cè)的屬性面板中更改名稱。
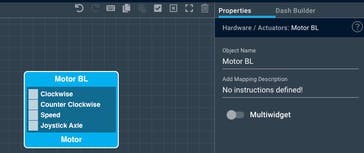
為了保存名稱,您必須單擊屬性選項(xiàng)卡底部的“保存屬性”按鈕。
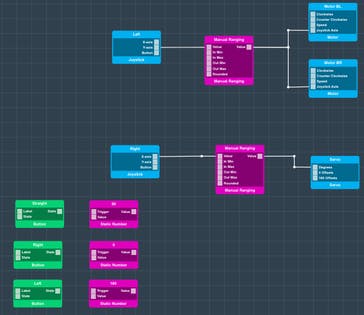
接下來,搜索手動(dòng)測距對(duì)象并將其拖到畫布上。

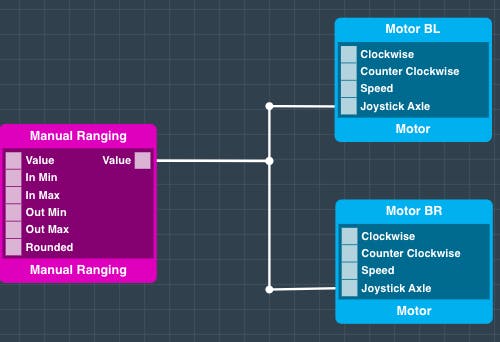
配置手動(dòng)測距對(duì)象如下:

**要配置對(duì)象上的每個(gè)端口,請(qǐng)單擊端口并在屏幕右側(cè)的屬性面板中更改屬性,然后點(diǎn)擊屏幕底部的保存屬性。如果您不這樣做,您的更改將不會(huì)被保存!**
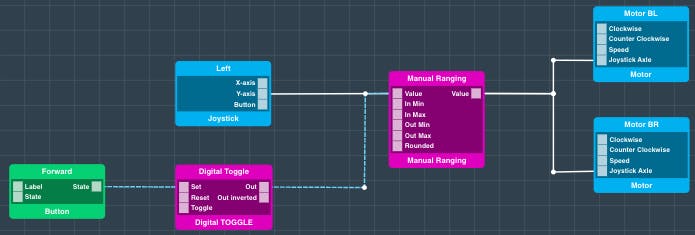
接下來,將 Manual Ranging 對(duì)象的 Value out 端口連接到 Motor 對(duì)象,如下所示:
現(xiàn)在搜索“操縱桿”對(duì)象并將其中兩個(gè)拖到畫布上。命名一個(gè)左,另一個(gè)右。

現(xiàn)在將 Y 軸端口從 Joystick Left 對(duì)象連接到 Manual Ranging 對(duì)象,如下所示:
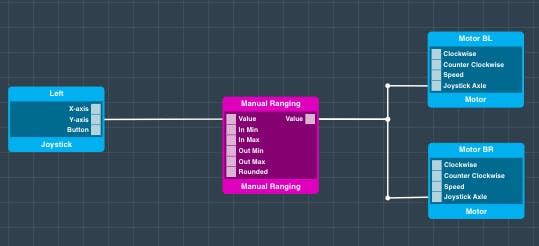
您的轉(zhuǎn)向車現(xiàn)在將使用左操縱桿向前和向后移動(dòng)。接下來,我們將研究轉(zhuǎn)向。
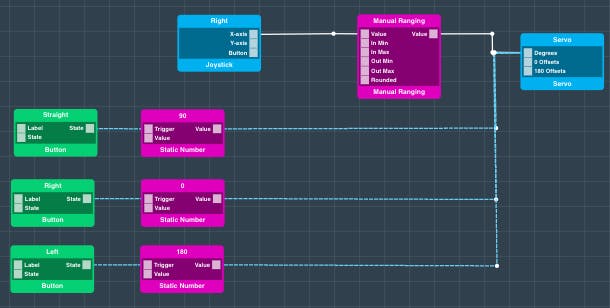
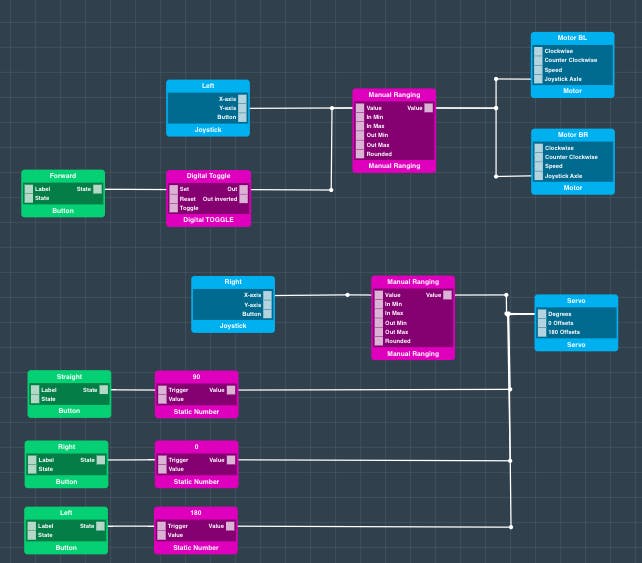
搜索另一個(gè) Manual Ranging 對(duì)象和一個(gè) Servo 對(duì)象并將其拖到畫布上。
我們建議您命名這兩個(gè)對(duì)象。
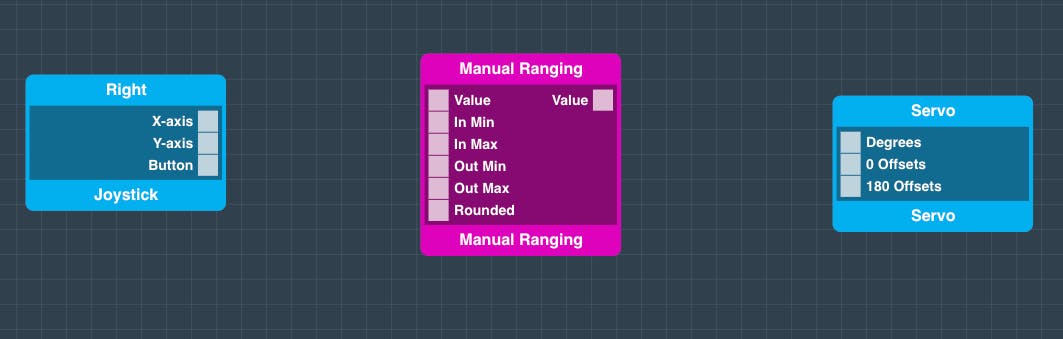
如下配置手動(dòng)測距對(duì)象上的端口:

**我們將 out min 設(shè)置為 180,將 out Max 設(shè)置為 0,這樣當(dāng)右操縱桿靜止在中心位置時(shí),操縱桿的輸出將輸出 90 而不是 0。**
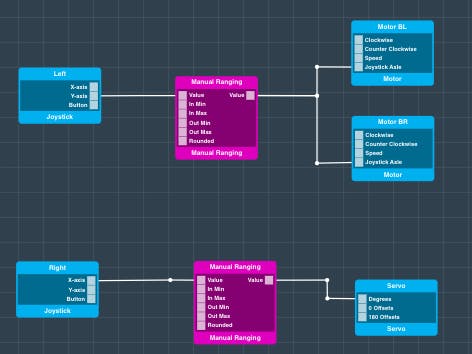
配置手動(dòng)測距對(duì)象后,我們將按如下方式連接代碼對(duì)象:

**您可能必須調(diào)整 0 和 180 偏移量才能在伺服系統(tǒng)上獲得適當(dāng)?shù)倪\(yùn)動(dòng)范圍。如果是這種情況,您可以在此處按照我們的偏移調(diào)整教程進(jìn)行操作。**
您的轉(zhuǎn)向車現(xiàn)在完全可以與一組操縱桿一起使用。但是,我們將添加一些允許通過儀表板界面控制汽車的代碼對(duì)象。
首先,我們將從轉(zhuǎn)向開始。將三個(gè)按鈕界面對(duì)象和三個(gè)靜態(tài)數(shù)字對(duì)象拖到畫布上。如圖所示排列并命名它們:
?
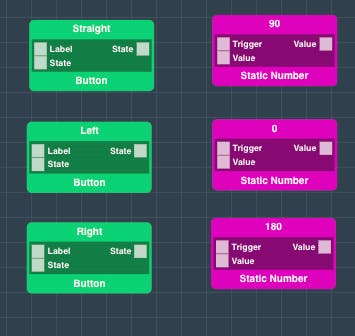
現(xiàn)在,標(biāo)記每個(gè) Button 對(duì)象,以便在儀表板上輕松識(shí)別它們。請(qǐng)務(wù)必保存每個(gè)按鈕的屬性。否則,您的更改將丟失!

現(xiàn)在使連接以藍(lán)色突出顯示:
我們現(xiàn)在將繼續(xù)使用界面按鈕使汽車向前行駛。
將一個(gè)數(shù)字切換代碼對(duì)象和一個(gè)界面按鈕拖到畫布上。請(qǐng)務(wù)必為按鈕命名和標(biāo)記。
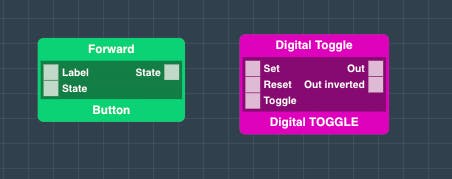
現(xiàn)在進(jìn)行以下以藍(lán)色突出顯示的連接:
恭喜,您的應(yīng)用程序現(xiàn)已完成!
點(diǎn)擊“保存應(yīng)用程序”并返回您的應(yīng)用程序頁面。
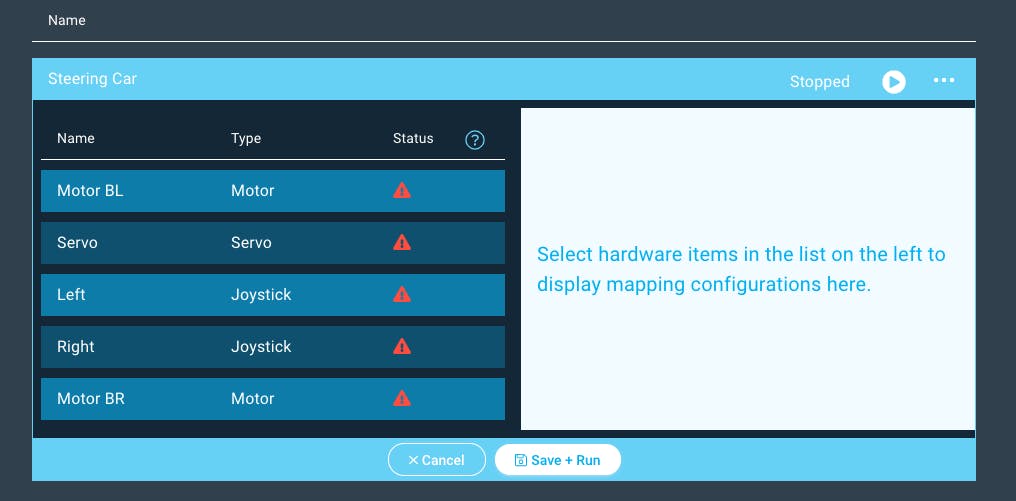
第 4 步:映射您的應(yīng)用程序
您現(xiàn)在應(yīng)該回到應(yīng)用程序頁面。
找到您的“轉(zhuǎn)向底盤”應(yīng)用程序并點(diǎn)擊播放按鈕。

包含應(yīng)用程序中所有設(shè)備的列表將展開。
接下來點(diǎn)擊“Motor BL”設(shè)備,右側(cè)會(huì)出現(xiàn)客戶端下拉菜單。
從下拉菜單中選擇電機(jī) BL 驅(qū)動(dòng)程序并點(diǎn)擊“完成”。
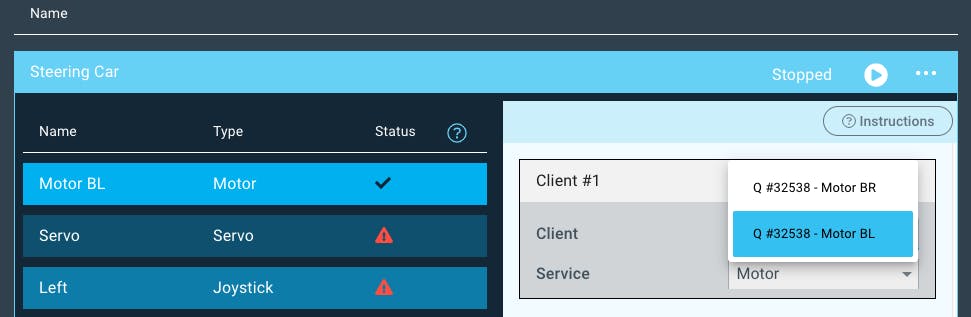
對(duì) Motor BR 和 Servo 設(shè)備重復(fù)相同的步驟,確保設(shè)備名稱與對(duì)象名稱匹配。
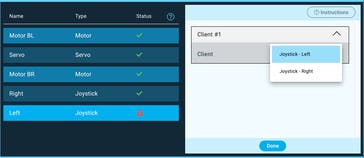
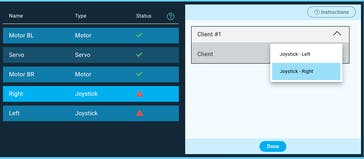
您可以以相同的方式映射操縱桿設(shè)備,但請(qǐng)確保將左右操縱桿驅(qū)動(dòng)程序與左右操縱桿設(shè)備匹配。
如果您尚未構(gòu)建操縱桿項(xiàng)目或 DIY 套件,您可以在此處了解如何構(gòu)建。
?
請(qǐng)注意狀態(tài)符號(hào)如何變?yōu)榫G色復(fù)選標(biāo)記。
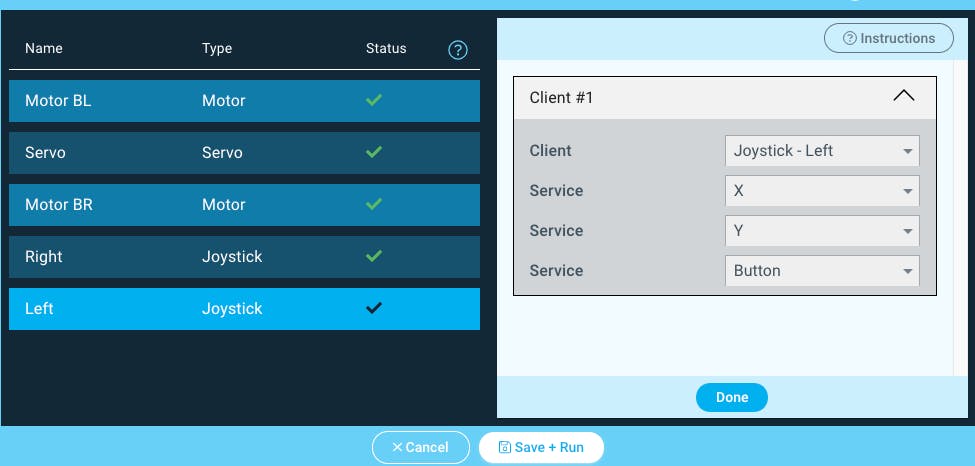
**將固件設(shè)備映射到您的應(yīng)用程序中的對(duì)象時(shí),請(qǐng)務(wù)必注意,只有相同類型的設(shè)備和對(duì)象才能映射在一起。例如,使用這個(gè)應(yīng)用程序,我們只能選擇將帶有按鈕固件的客戶端映射到按鈕對(duì)象。**
第 5 步:運(yùn)行應(yīng)用程序!
接下來,點(diǎn)擊“保存+運(yùn)行”
?

恭喜!您的原型遙控車現(xiàn)已完成,玩得開心!
?
- 帶振動(dòng)電機(jī)的手環(huán)開源項(xiàng)目
- 使用Python控制物聯(lián)網(wǎng)項(xiàng)目的伺服電機(jī)
- 2個(gè)帶記憶的伺服電機(jī)的開源項(xiàng)目
- L293電機(jī)驅(qū)動(dòng)器開源項(xiàng)目
- ISS Mimic電機(jī)分線板開源項(xiàng)目
- 三菱PLC編程實(shí)例項(xiàng)目例程-伺服電機(jī)控制 41次下載
- 高熱or極寒,派克高低溫伺服電機(jī)就該出場了
- 伺服直流電機(jī)仿真圖
- 交流伺服電機(jī)的單片機(jī)控制及其應(yīng)用.
- 機(jī)器人伺服電機(jī)如何選型? 8次下載
- 微型伺服電機(jī)的應(yīng)用、工作原理及特點(diǎn) 33次下載
- 電機(jī)伺服控制的PCB原理圖免費(fèi)下載 82次下載
- 關(guān)于步進(jìn)電機(jī)和伺服電機(jī)的技術(shù)問題解答 18次下載
- 伺服電機(jī)應(yīng)用技術(shù) 35次下載
- PLC控制伺服電機(jī)應(yīng)用實(shí)例 66次下載
- 交流伺服電機(jī)與直流伺服電機(jī)的對(duì)比分析 463次閱讀
- 直流伺服電機(jī)和交流伺服電機(jī)的差異 683次閱讀
- 交流伺服電機(jī)與直流伺服電機(jī)的區(qū)別 631次閱讀
- 伺服電機(jī)的常見類型詳解 881次閱讀
- 伺服電機(jī)抖動(dòng)原因分析與伺服電機(jī)抖動(dòng)怎么調(diào)分解 1.8w次閱讀
- 步進(jìn)電機(jī)和伺服電機(jī)有什么區(qū)別 7386次閱讀
- 步進(jìn)電機(jī)和伺服電機(jī)的辨別方法 9124次閱讀
- 什么是伺服電機(jī)? 伺服電機(jī)詳解 19.1w次閱讀
- PLC在伺服電機(jī)中的應(yīng)用 6026次閱讀
- 伺服電機(jī)選型計(jì)算最簡單方式_伺服電機(jī)的工作原理 4.2w次閱讀
- 伺服電機(jī)工作原理,直流和交流伺服電機(jī) 1.3w次閱讀
- 一般的伺服電機(jī)多少錢_松下伺服電機(jī)價(jià)格 5.5w次閱讀
- 伺服電機(jī)抖動(dòng)原因及處理 2.7w次閱讀
- 什么是伺服系統(tǒng),步進(jìn)電機(jī)和伺服電機(jī)的區(qū)別 1.2w次閱讀
- 異步伺服電機(jī)和同步伺服電機(jī)的區(qū)別 3.6w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數(shù)據(jù)手冊(cè)
- 1.06 MB | 532次下載 | 免費(fèi)
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費(fèi)
- 3TC358743XBG評(píng)估板參考手冊(cè)
- 1.36 MB | 330次下載 | 免費(fèi)
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費(fèi)
- 5元宇宙深度解析—未來的未來-風(fēng)口還是泡沫
- 6.40 MB | 227次下載 | 免費(fèi)
- 6迪文DGUS開發(fā)指南
- 31.67 MB | 194次下載 | 免費(fèi)
- 7元宇宙底層硬件系列報(bào)告
- 13.42 MB | 182次下載 | 免費(fèi)
- 8FP5207XR-G1中文應(yīng)用手冊(cè)
- 1.09 MB | 178次下載 | 免費(fèi)
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 2555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33566次下載 | 免費(fèi)
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費(fèi)
- 4開關(guān)電源設(shè)計(jì)實(shí)例指南
- 未知 | 21549次下載 | 免費(fèi)
- 5電氣工程師手冊(cè)免費(fèi)下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費(fèi)
- 6數(shù)字電路基礎(chǔ)pdf(下載)
- 未知 | 13750次下載 | 免費(fèi)
- 7電子制作實(shí)例集錦 下載
- 未知 | 8113次下載 | 免費(fèi)
- 8《LED驅(qū)動(dòng)電路設(shè)計(jì)》 溫德爾著
- 0.00 MB | 6656次下載 | 免費(fèi)
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費(fèi)
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537798次下載 | 免費(fèi)
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費(fèi)
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費(fèi)
- 6電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191187次下載 | 免費(fèi)
- 7十天學(xué)會(huì)AVR單片機(jī)與C語言視頻教程 下載
- 158M | 183279次下載 | 免費(fèi)
- 8proe5.0野火版下載(中文版免費(fèi)下載)
- 未知 | 138040次下載 | 免費(fèi)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論