 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
大家好!這是我的下一個項目,智能手機控制的 Arduino 4WD 機器人汽車或藍牙 Arduino 機器人。它可以前后左右移動,改變速度,打開/關閉前后燈,也可以喇叭。
這是一個非常簡單的設計機器人,您可以輕松構建它。
第 1 步:要求
所需零件:
- Arduino Uno R3 板
- 帶直流電機和車輪 x4 的底盤 4WD
- 電機驅動器 L298N x2
- 藍牙模塊HC-06
- 鋰離子電池 18650 x2
- 蜂鳴器
第二步:組裝四驅機器人智能汽車底盤
第 3 步:接線圖
?
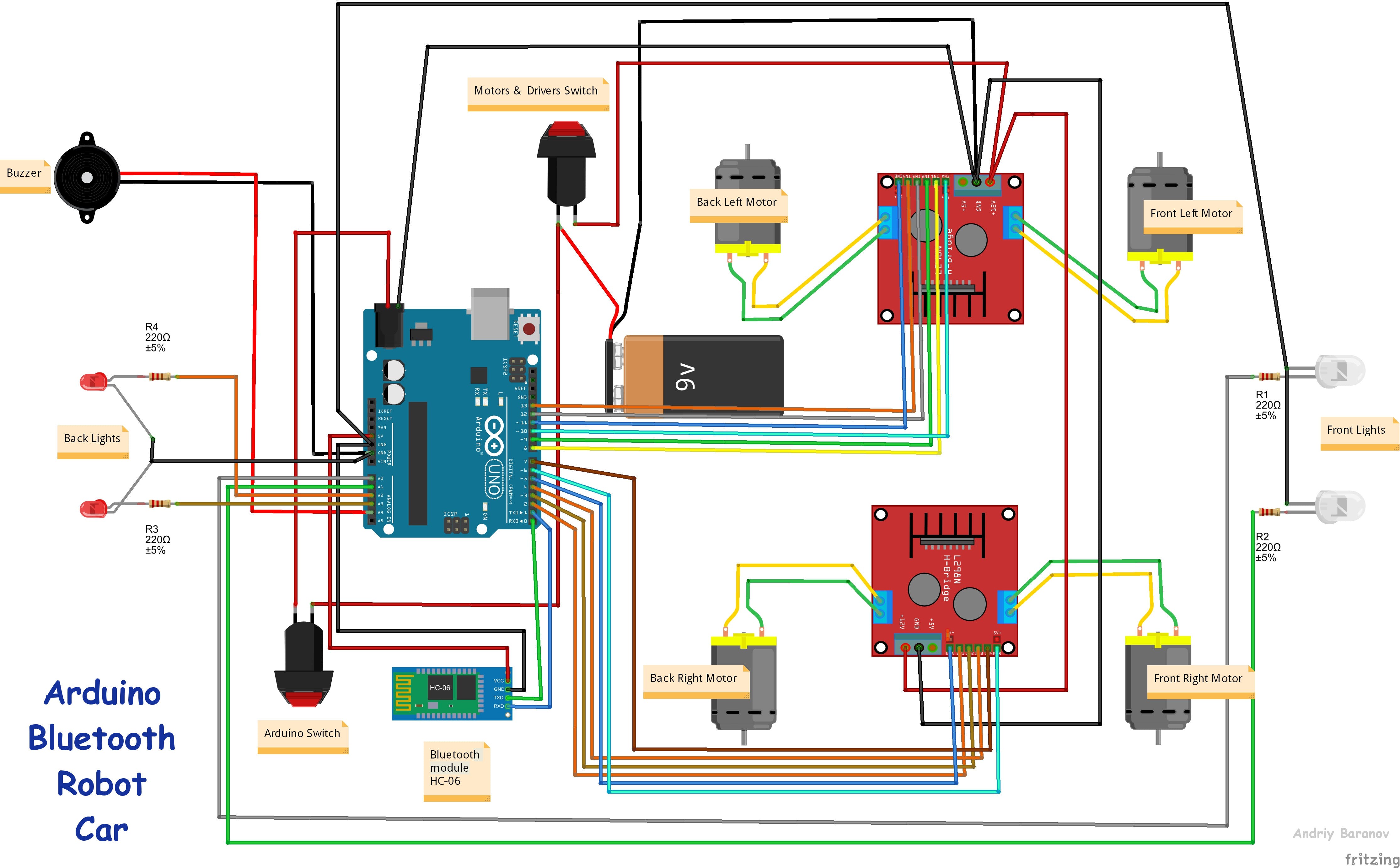
按照上面的接線圖進行連接。
?
第 4 步:上傳機器人代碼
#define light_FR 14 //LED Front Right pin A0 for Arduino Uno#define light_FL 15 //LED Front Left pin A1 for Arduino Uno #define light_BR 16 //LED Back Right pin A2 for Arduino Uno #define light_BL 17 //LED Back Left pin A3 for Arduino Uno #define horn_Buzz 18 //Horn Buzzer pin A4 for Arduino Uno#define ENA_m1 5 // Enable/speed motor Front Right #define ENB_m1 6 // Enable/speed motor Back Right #define ENA_m2 10 // Enable/speed motor Front Left #define ENB_m2 11 // Enable/speed motor Back Left#define IN_11 2 // L298N #1 in 1 motor Front Right #define IN_12 3 // L298N #1 in 2 motor Front Right #define IN_13 4 // L298N #1 in 3 motor Back Right #define IN_14 7 // L298N #1 in 4 motor Back Right#define IN_21 8 // L298N #2 in 1 motor Front Left #define IN_22 9 // L298N #2 in 2 motor Front Left #define IN_23 12 // L298N #2 in 3 motor Back Left #define IN_24 13 // L298N #2 in 4 motor Back Leftint command; //Int to store app command state. int speedCar = 100; // 50 - 255. int speed_Coeff = 4; boolean lightFront = false; boolean lightBack = false; boolean horn = false;void setup() { pinMode(light_FR, OUTPUT); pinMode(light_FL, OUTPUT); pinMode(light_BR, OUTPUT); pinMode(light_BL, OUTPUT); pinMode(horn_Buzz, OUTPUT); pinMode(ENA_m1, OUTPUT); pinMode(ENB_m1, OUTPUT); pinMode(ENA_m2, OUTPUT); pinMode(ENB_m2, OUTPUT); pinMode(IN_11, OUTPUT); pinMode(IN_12, OUTPUT); pinMode(IN_13, OUTPUT); pinMode(IN_14, OUTPUT); pinMode(IN_21, OUTPUT); pinMode(IN_22, OUTPUT); pinMode(IN_23, OUTPUT); pinMode(IN_24, OUTPUT);Serial.begin(9600); } void goAhead(){ digitalWrite(IN_11, HIGH); digitalWrite(IN_12, LOW); analogWrite(ENA_m1, speedCar);digitalWrite(IN_13, LOW); digitalWrite(IN_14, HIGH); analogWrite(ENB_m1, speedCar);digitalWrite(IN_21, LOW); digitalWrite(IN_22, HIGH); analogWrite(ENA_m2, speedCar);digitalWrite(IN_23, HIGH); digitalWrite(IN_24, LOW); analogWrite(ENB_m2, speedCar);}void goBack(){ digitalWrite(IN_11, LOW); digitalWrite(IN_12, HIGH); analogWrite(ENA_m1, speedCar);digitalWrite(IN_13, HIGH); digitalWrite(IN_14, LOW); analogWrite(ENB_m1, speedCar);digitalWrite(IN_21, HIGH); digitalWrite(IN_22, LOW); analogWrite(ENA_m2, speedCar);digitalWrite(IN_23, LOW); digitalWrite(IN_24, HIGH); analogWrite(ENB_m2, speedCar);}void goRight(){ digitalWrite(IN_11, LOW); digitalWrite(IN_12, HIGH); analogWrite(ENA_m1, speedCar);digitalWrite(IN_13, HIGH); digitalWrite(IN_14, LOW); analogWrite(ENB_m1, speedCar);digitalWrite(IN_21, LOW); digitalWrite(IN_22, HIGH); analogWrite(ENA_m2, speedCar);digitalWrite(IN_23, HIGH); digitalWrite(IN_24, LOW); analogWrite(ENB_m2, speedCar);}void goLeft(){digitalWrite(IN_11, HIGH); digitalWrite(IN_12, LOW); analogWrite(ENA_m1, speedCar);digitalWrite(IN_13, LOW); digitalWrite(IN_14, HIGH); analogWrite(ENB_m1, speedCar);digitalWrite(IN_21, HIGH); digitalWrite(IN_22, LOW); analogWrite(ENA_m2, speedCar);digitalWrite(IN_23, LOW); digitalWrite(IN_24, HIGH); analogWrite(ENB_m2, speedCar);}void goAheadRight(){ digitalWrite(IN_11, HIGH); digitalWrite(IN_12, LOW); analogWrite(ENA_m1, speedCar/speed_Coeff);digitalWrite(IN_13, LOW); digitalWrite(IN_14, HIGH); analogWrite(ENB_m1, speedCar/speed_Coeff);digitalWrite(IN_21, LOW); digitalWrite(IN_22, HIGH); analogWrite(ENA_m2, speedCar);digitalWrite(IN_23, HIGH); digitalWrite(IN_24, LOW); analogWrite(ENB_m2, speedCar); }void goAheadLeft(){ digitalWrite(IN_11, HIGH); digitalWrite(IN_12, LOW); analogWrite(ENA_m1, speedCar);digitalWrite(IN_13, LOW); digitalWrite(IN_14, HIGH); analogWrite(ENB_m1, speedCar);digitalWrite(IN_21, LOW); digitalWrite(IN_22, HIGH); analogWrite(ENA_m2, speedCar/speed_Coeff);digitalWrite(IN_23, HIGH); digitalWrite(IN_24, LOW); analogWrite(ENB_m2, speedCar/speed_Coeff); }void goBackRight(){ digitalWrite(IN_11, LOW); digitalWrite(IN_12, HIGH); analogWrite(ENA_m1, speedCar/speed_Coeff);digitalWrite(IN_13, HIGH); digitalWrite(IN_14, LOW); analogWrite(ENB_m1, speedCar/speed_Coeff);digitalWrite(IN_21, HIGH); digitalWrite(IN_22, LOW); analogWrite(ENA_m2, speedCar);digitalWrite(IN_23, LOW); digitalWrite(IN_24, HIGH); analogWrite(ENB_m2, speedCar);}void goBackLeft(){ digitalWrite(IN_11, LOW); digitalWrite(IN_12, HIGH); analogWrite(ENA_m1, speedCar);digitalWrite(IN_13, HIGH); digitalWrite(IN_14, LOW); analogWrite(ENB_m1, speedCar);digitalWrite(IN_21, HIGH); digitalWrite(IN_22, LOW); analogWrite(ENA_m2, speedCar/speed_Coeff);digitalWrite(IN_23, LOW); digitalWrite(IN_24, HIGH); analogWrite(ENB_m2, speedCar/speed_Coeff);}void stopRobot(){ digitalWrite(IN_11, LOW); digitalWrite(IN_12, LOW); analogWrite(ENA_m1, speedCar);digitalWrite(IN_13, LOW); digitalWrite(IN_14, LOW); analogWrite(ENB_m1, speedCar);digitalWrite(IN_21, LOW); digitalWrite(IN_22, LOW); analogWrite(ENA_m2, speedCar);digitalWrite(IN_23, LOW); digitalWrite(IN_24, LOW); analogWrite(ENB_m2, speedCar); } void loop(){ if (Serial.available() > 0) { command = Serial.read(); stopRobot(); //Initialize with motors stopped.if (lightFront) {digitalWrite(light_FR, HIGH); digitalWrite(light_FL, HIGH);} if (!lightFront) {digitalWrite(light_FR, LOW); digitalWrite(light_FL, LOW);} if (lightBack) {digitalWrite(light_BR, HIGH); digitalWrite(light_BL, HIGH);} if (!lightBack) {digitalWrite(light_BR, LOW); digitalWrite(light_BL, LOW);} if (horn) {digitalWrite(horn_Buzz, HIGH);} if (!horn) {digitalWrite(horn_Buzz, LOW);}switch (command) { case 'F':goAhead();break; case 'B':goBack();break; case 'L':goLeft();break; case 'R':goRight();break; case 'I':goAheadRight();break; case 'G':goAheadLeft();break; case 'J':goBackRight();break; case 'H':goBackLeft();break; case '0':speedCar = 100;break; case '1':speedCar = 115;break; case '2':speedCar = 130;break; case '3':speedCar = 145;break; case '4':speedCar = 160;break; case '5':speedCar = 175;break; case '6':speedCar = 190;break; case '7':speedCar = 205;break; case '8':speedCar = 220;break; case '9':speedCar = 235;break; case 'q':speedCar = 255;break; case 'W':lightFront = true;break; case 'w':lightFront = false;break; case 'U':lightBack = true;break; case 'u':lightBack = false;break; case 'V':horn = true;break; case 'v':horn = false;break;} } }
第 5 步:注釋
在上傳代碼之前,您必須斷開藍牙模塊與 Arduino Uno 板(引腳 0、1)的連接。
第 6 步:下載 Android 應用程序
第 7 步:連接藍牙模塊
要將您的智能手機連接到 Arduino 藍牙模塊 HC-06,我們必須輸入 PIN CODE 1234 或 0000。
代碼::
第 8 步:完成
一旦您正確完成所有步驟,機器人就可以開始使用了!
謝謝你們!
下載該資料的人也在下載
下載該資料的人還在閱讀
更多 >
- 應用程序控制的機器人
- 使用Arduino和Android設備控制Roomba機器人
- 使用Zerynth應用程序控制電動氣動電路
- KUKA機器人編程 0次下載
- 可以用手機應用程序控制的中型四足機器人
- 基于ESP8266的自主輔助農業機器人 0次下載
- 基于ESP32的藍牙控制機器人 0次下載
- 基于Arduino UNO的語音控制機器人 6次下載
- 手指在應用程序上機器人
- 從Android應用程序控制16x2 LCD
- 基于DSP和PC的農業機器人控制系統 17次下載
- 基于DSP的排險機器人車體控制系統 14次下載
- 機器人PID控制概述 27次下載
- 機器人設計教程之機器人控制和決策子系統 23次下載
- 機器人控制程序(舵機型) 16次下載
- 如何使用PLC控制機器人 793次閱讀
- VASS 標準機器人的附加功能 699次閱讀
- 讀取機器人程序中的變量 865次閱讀
- 利用STM32實現自平衡機器人功能項目 873次閱讀
- KUKA機器人CELL程序分析 2817次閱讀
- 機器人程序中斷與相應的恢復方式 4717次閱讀
- 機器人控制系統分類_機器人控制系統有哪些 2.6w次閱讀
- 醫用機器人的定義_醫用機器人發展 3122次閱讀
- 機器人控制器有哪些類型_機器人控制器發展 1.1w次閱讀
- 協作機器人的起源_為什么需要協作機器人 8127次閱讀
- 移動機器人控制系統設計與仿真 3433次閱讀
- 機器人十大流行編程語言的介紹及機器人編程系統以及操作方法 4.2w次閱讀
- 機器人控制系統的基本單元與機器人控制系統的特點分析 1w次閱讀
- 創建智能車機器人smartcar的步驟教程詳解 4340次閱讀
- 機器人的運動控制的介紹和如何將機器人的運動控制分成4種任務 1w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數據手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網監
工商網監
評論