 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
描述
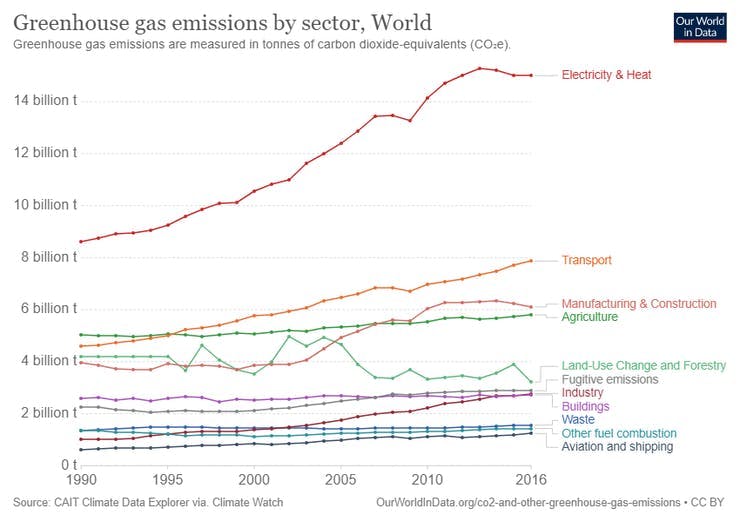
人類是自私的,消耗地球上所有的資源并不斷地破壞它,導致氣候變化等負面后果,導致全球變暖,蜜蜂和鳥類等物種的數(shù)量顯著下降。
目前,物流從生產(chǎn)者到消費者的工作方式,占用了大量的運輸。其中大部分是在平均效率為 20% 的內(nèi)燃機上運行的車輛的幫助下完成的。與使用可再生資源的任何其他交通工具相比,這要少得多。這是二氧化碳排放的主要原因。這種二氧化碳排放導致全球變暖和氣候變化。為什么我們不轉(zhuǎn)向太陽能、風能、水電等可再生能源或核能等清潔能源?在使用汽油/柴油作為能源很容易的情況下,它們需要大量投資和前期成本。
?
電動汽車的主要問題是里程焦慮。人們擔心如果充電結(jié)束或電池爆裂怎么辦等。如果我們開發(fā)一種快速充電電池的技術(shù)并戰(zhàn)略性地部署充電網(wǎng)絡,那么未來使用電動汽車將很容易,至少在發(fā)展中國家。
來到我們的解決方案:貨物的最后一英里交付對于任何組織都非常重要,因為它是與客戶互動的最后一部分。如果交貨無憂,客戶將再次訂購,希望得到良好的服務。但大多數(shù)時候情況并非如此,快遞員弄亂了位置,然后我們應該與他溝通當前位置,否則包裹將被重新路由到另一個快遞辦公室,而客戶在包裹辦公室后面跑到辦公室。所有這些都涉及不必要的車輛移動,導致二氧化碳和一氧化碳氣體的排放。
使用自動電動送貨車是最好的選擇,像nuro這樣的公司已經(jīng)在研究它,這是一件非常好的事情。亞馬遜等巨頭正在開發(fā)基于無人機的送貨服務,這將幫助我們顯著減少排放。多旋翼飛機或俗稱的無人機或四軸飛行器可以成為最后一英里貨物交付的潛在替代品。由于路線雜亂無章,多個送貨代理到達同一地點,送貨車輛管理不善,貨物的最后一公里運輸本身需要大量能源。無人機交付可以成為相同的潛在替代品。
但是自動送貨車和無人機都需要經(jīng)常充電,而且它們的電池可能不會持續(xù)很長時間。特別是在四軸飛行器和多旋翼的情況下,每個電機的轉(zhuǎn)速大約在 5000 到 10000 之間,具體取決于電機的 KV。每個電機的功耗在 100 到 300W 之間變化。因此電池只能運行 30 分鐘到 1 小時。但在這段時間內(nèi),根據(jù)有效載荷和電池容量,無人機可以飛行 50 到 60 公里。但是,由于可伸縮的空中距離而不是道路距離,無人機可以更快地到達該地點。
但您可能會想,為什么不能添加更大的電池?但是更大的電池反過來會增加重量,從而減少飛行時間。因此,最佳有效載荷以及高效電池是唯一的解決方案。
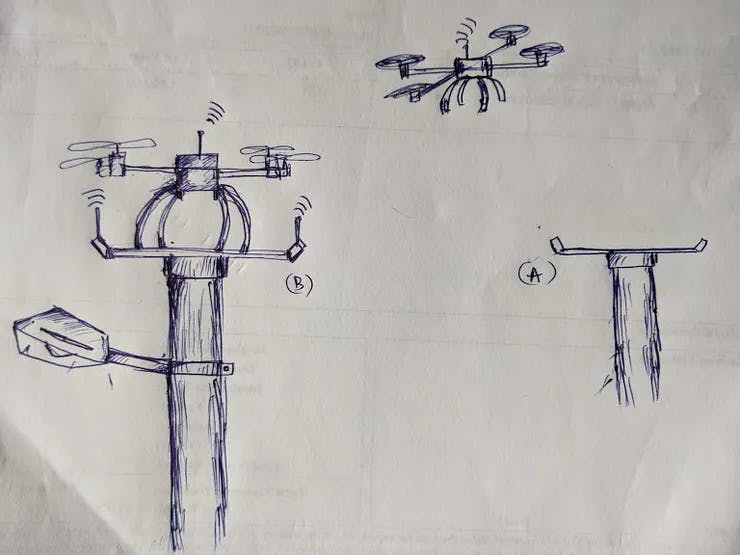
為了解決這個問題,我們建議無人機和自動送貨車輛使用自動充電站,它們可以自行充電并從那里起飛。在無人機的情況下是鳥巢,在 UGV 或無人駕駛地面車輛的情況下是車庫。但是需要仔細觀察和維護無人機和 UGV,以充分利用它們
在無人機中,由于其部件以如此高的 RPM 移動,如果只有一個稍微松動的螺釘,就會因為高速電機的振動放大而造成災難。快速基于羽毛的解決方案將用于檢測這些微小缺陷,并在無人機從一個充電器跳到另一個充電器時定期提醒它們。
這種主動預測性維護也可用于 UGV,以檢測其他方式無法檢測到的異常情況。我知道上面的解釋很長,但很需要說明我的觀點。
讓我們開始吧
第 1 步:獲取所需的東西
獲取所有需要的東西,例如快速羽毛、樹莓派 4、BLDC 電機、木板、烙鐵等
第 2 步:快速羽毛入門
這是一個精彩的博客是由Arduino"have11"Guy 寫的關于這個主題的請參考那個并準備好基本的東西
第 3 步:訓練數(shù)據(jù):

?
我計劃在無人駕駛無人機充電器的情況下將設備連接到無人機來和著陸的充電板上,并且在 UGV 的情況下充電時,該設備將保留在 UGV 本身上。這些充電站最好的一點是它們依靠太陽能運行,通過它我們將實現(xiàn)零碳足跡的目標,從而阻止最后一英里運輸車輛的排放。此外,由于這些安裝在路燈頂部,因此不會占用任何空間。
設備將運行診斷程序并檢查缺陷,例如
1. 螺旋槳損壞
2. 螺絲松動
3. 不平衡螺旋槳
4. 損壞的框架
5、斷線

?
損壞的螺旋槳損壞是危險的,因為任何以 10000 RPM 運行的偏心質(zhì)量都可能是致命的武器。當無人機在空中飛行時,它可能會掉落并損壞人員,甚至可能由于高速剃須刀鋒利的螺旋槳葉片而造成生命損失。
它會將它們標記為異常,并將其上傳到儀表板中。
充電狀態(tài)也可以共享到云端,標記充電器墊忙碌。
?
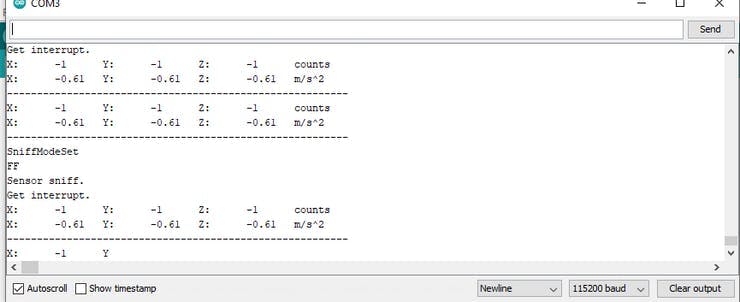
我嘗試通過 IMU 傳感器(即 MC3635)收集數(shù)據(jù),但不幸的是,我的 IMU 提供恒定輸出并且它的值沒有變化,就像這樣,我設法通過將 I2C0 輸出連接到 Arduino Mega 板和通過訪問傳感器的 I2C 地址(0x44h)將數(shù)據(jù)讀取到串行端口
Sensor sniff.
Get interrupt.
X: -1 Y: -1 Z: -1 counts
X: -0.61 Y: -0.61 Z: -0.61 m/s^2
---------------------------------------------------------
X: -1 Y: -1 Z: -1 counts
X: -0.61 Y: -0.61 Z: -0.61 m/s^2
Sensor sniff.
Get interrupt.
X: -1 Y: -1 Z: -1 counts
X: -0.61 Y: -0.61 Z: -0.61 m/s^2
---------------------------------------------------------
X: -1 Y: -1 Z: -1 counts
X: -0.61 Y: -0.61 Z: -0.61 m/s^2
?
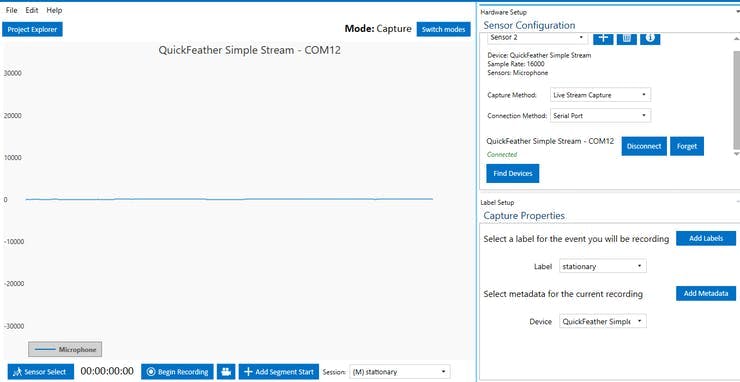
所以我只能選擇使用麥克風來捕捉無人機葉片聲音中的異常情況。所以我通過串行固件加載了簡單的流音頻,然后啟動 DCL 通過串行本身收集數(shù)據(jù)。
由于印度的 Covid 19 大流行,我不得不從工作場所班加羅爾趕往家鄉(xiāng)。因此,除了少數(shù)開發(fā)板之外,沒有任何硬件。
因此,我將使用快速羽毛板和用于模擬無人機風扇的計算機風扇來模擬整個設置
現(xiàn)在我訓練了模型并得到了結(jié)果
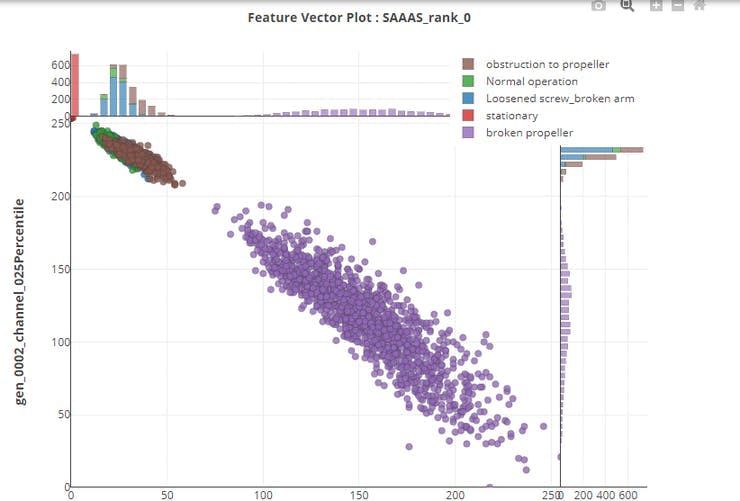
?
第 4 步:測試模型
第 4 步:測試模型
我已經(jīng)上傳了測試數(shù)據(jù)并對其進行了分類,現(xiàn)在我可以使用這些數(shù)據(jù)在分析工作室本身上測試我的模型。
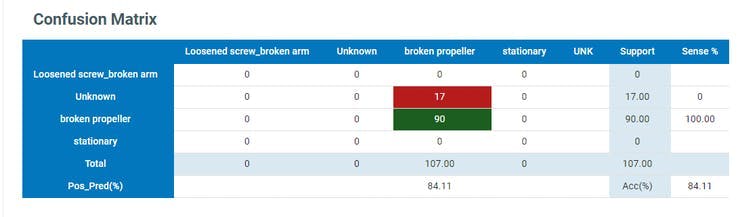
?
混淆矩陣在這里顯示了一個很好的數(shù)字。
第 5 步:工作視頻和演示:
第 5 步:工作視頻和演示:
根據(jù)您的要求下載生成的模型。如果您想更改輸出文本并修改某些內(nèi)容,您可以隨時選擇您有權(quán)編輯和測試內(nèi)容的代碼版本。在這里,我正在下載我需要的 .bin 文件,因為我將使用樹莓派上快速羽毛的輸出信息。
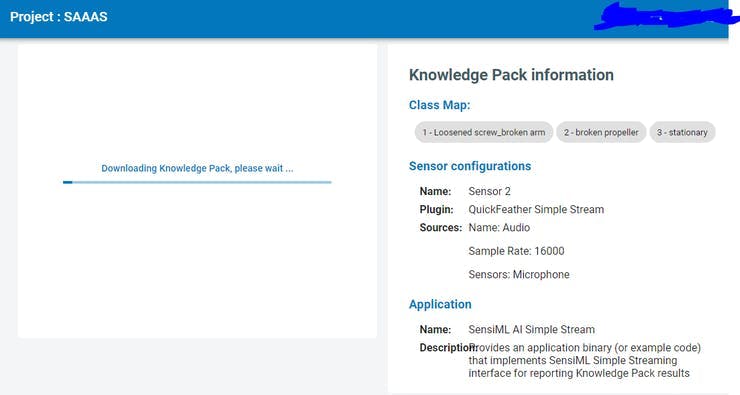
?
這是該項目的工作視頻和演示
?
結(jié)論:我們正處于一個必須轉(zhuǎn)向電動汽車的階段,否則我們將無法控制或減少氣候變化。基于無人機或基于 UGV 的交付是未來。例如,考慮送餐,至少在像 zomato 和 swiggy 這樣的印度公司
2020 財年,印度每月平均有 1070 萬客戶在該平臺上訂購食物,平均每月頻率超過三倍。在截至 2020 年 12 月的九個月中,99.3% 的外賣訂單來自 Zomato 的移動應用程序。
這些交付是在使用不可再生燃料的車輛上單獨進行的。這使得該過程效率低下。基于無人機的食品配送是最后一英里配送的最佳替代品,我們的主動預測性維護設備將有助于充電站的診斷檢查。當未來充滿自動送貨車輛時,這將成為新常態(tài)。
?
接觸式充電始終是最好的充電方式,因為沒有無線充電中常見的 40g% 能量損失。將導體嵌入無人機的腿中有助于我們快速、整齊地為設備充電。
我想在競賽的線路供電類別下提交我的項目。
參考資料:
黑碳爐灶排放:對 19 種爐灶/燃料組合的現(xiàn)場評估
A. Kanawaday 和 A. Sane,“使用 IoT 傳感器數(shù)據(jù)對工業(yè)機器進行預測性維護的機器學習”,2 017 第 8 屆 IEEE 軟件工程和服務科學國際會議 (ICSESS) ,2017 年,第 87-90 頁,doi: 10.1109 /ICSESS.2017.8342870。
- A. Kanawaday 和 A. Sane,“使用 IoT 傳感器數(shù)據(jù)對工業(yè)機器進行預測性維護的機器學習”,2 017 第 8 屆 IEEE 軟件工程和服務科學國際會議 (ICSESS) ,2017 年,第 87-90 頁,doi: 10.1109 /ICSESS.2017.8342870。
- 嵌入式人機交互研究與設計
- 無人機中嵌入式系統(tǒng)方案的設計
- 無人機骨干網(wǎng)分布式及接入選擇算法研究分析 4次下載
- 小型電動無人機的總體參數(shù)設計方法研究說明 19次下載
- 如何使用云計算進行無人機云操作系統(tǒng)的詳細資料說明 8次下載
- 無人機和無人機控制方法及無人機遠程操控系統(tǒng)方法說明 69次下載
- 如何使用無線電對無人機進行管控 7次下載
- 無人機中繼模塊和無人機圖傳控制系統(tǒng)介紹 60次下載
- 無人機柔性裝配工裝應用 2次下載
- 嵌入式的智能搜救無人機飛控系統(tǒng) 2次下載
- 基于無人機的分類 20次下載
- 無人機偵測和反制系統(tǒng) 30次下載
- 基于uCOS的無人機仿真系統(tǒng)設計與實現(xiàn)
- PC/104+在無人機載遙感儀器中的應用
- 小型無人機數(shù)據(jù)鏈與自主飛控系統(tǒng)設計
- 想做無人機編隊表演?需要掌握哪些? 559次閱讀
- 無人機鏈路系統(tǒng)的組成 1.6w次閱讀
- 冬天應該如何保養(yǎng)和使用無人機 2529次閱讀
- 無人機群的神秘面紗 無人機的未來發(fā)展路線 1451次閱讀
- 關于如何制作一個無人機 3.7w次閱讀
- 怎樣使無人機安全飛行?無人機飛行需要掌握什么安全知識 1.5w次閱讀
- 無人機快遞可行性探究:無人機真的靠譜嗎? 1.2w次閱讀
- 新疆為什么禁飛無人機_新疆無人機禁飛區(qū)域 5.7w次閱讀
- 水下無人機原理分析 1.3w次閱讀
- nixie微型無人機的功能介紹_nixie微型無人機多少錢 1.3w次閱讀
- 微型無人機發(fā)展前景_無人機發(fā)展趨勢 8416次閱讀
- 中國有哪些軍用無人機_國內(nèi)軍用無人機排名 11.2w次閱讀
- powerray水下無人機簡單介紹 5408次閱讀
- 電動無人機和油動無人機性能的對比 2710次閱讀
- 基于DSP的嵌入式系統(tǒng)人機接口設計 1260次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數(shù)據(jù)手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發(fā)指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數(shù)字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅(qū)動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論