 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問(wèn)
提問(wèn)  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
描述
嘿伙計(jì)們,今天在本教程中,我們將學(xué)習(xí)一些復(fù)雜的東西。那是關(guān)于使用 Magicbit 和 Arduino IDE 的自平衡機(jī)器人。所以讓我們開(kāi)始吧。
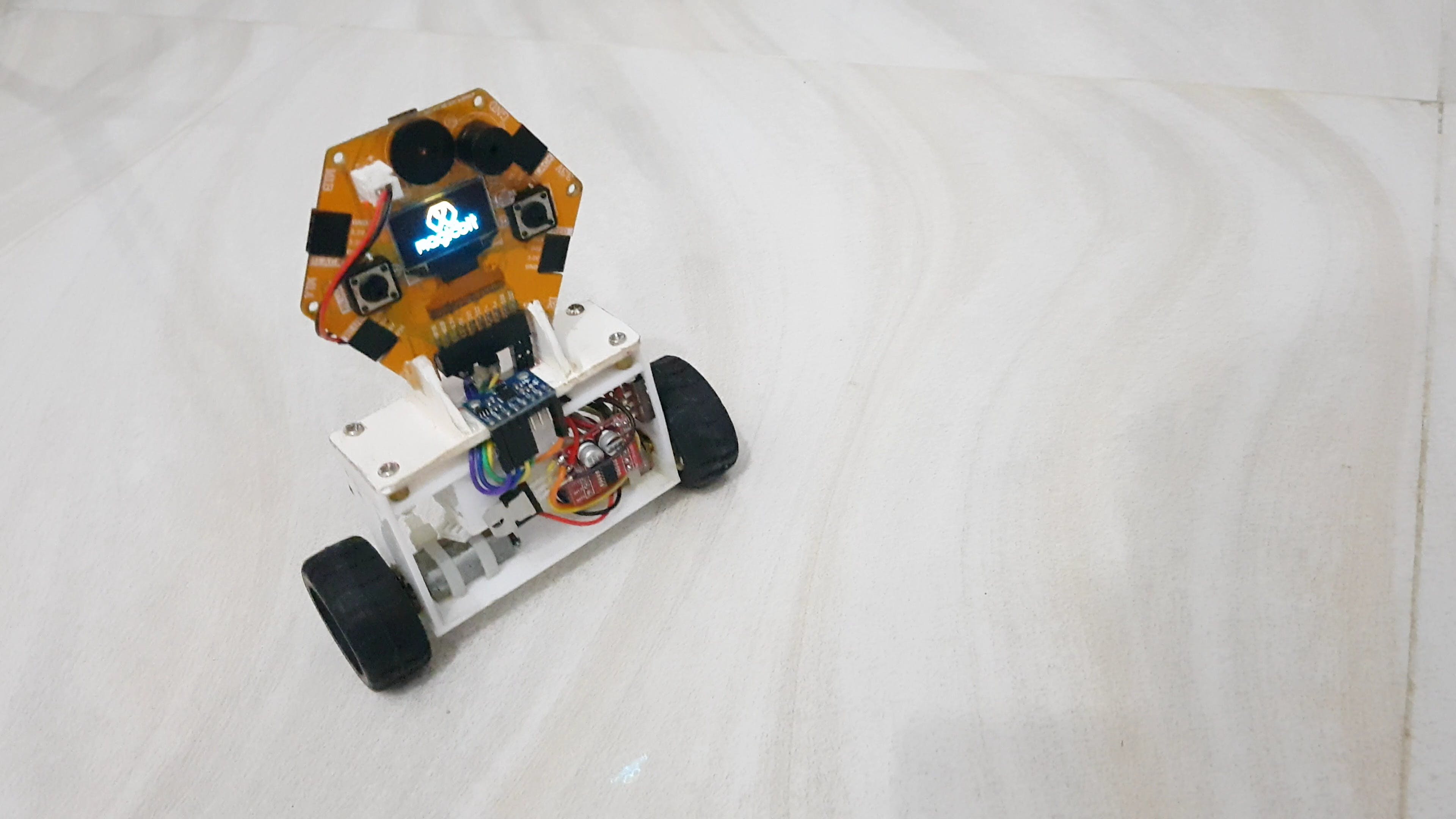
首先,讓我們看看什么是自平衡機(jī)器人。自平衡機(jī)器人是兩輪機(jī)器人。特殊之處在于機(jī)器人可以在不使用任何外部支撐的情況下自行平衡。通電后,機(jī)器人會(huì)站起來(lái),然后通過(guò)擺動(dòng)運(yùn)動(dòng)不斷地保持平衡。所以現(xiàn)在你對(duì)自平衡機(jī)器人有了一些粗略的了解。
理論與方法論
為了平衡機(jī)器人,首先我們從某個(gè)傳感器獲取數(shù)據(jù)以測(cè)量機(jī)器人與垂直平面的角度。為此,我們使用了 MPU6050。從傳感器獲取數(shù)據(jù)后,我們計(jì)算垂直平面的傾斜度。如果機(jī)器人處于直線和平衡位置,則傾斜角為零。如果不是,則傾斜角為正值或負(fù)值。如果機(jī)器人向前傾斜,那么機(jī)器人應(yīng)該向前移動(dòng)。此外,如果機(jī)器人向反方向傾斜,則機(jī)器人應(yīng)向反方向移動(dòng)。如果這個(gè)傾斜角很高,那么響應(yīng)速度應(yīng)該很高。反之亦然,傾斜角低則反應(yīng)速度應(yīng)低。為了控制這個(gè)過(guò)程,我們使用了稱為 PID 的特定定理。PID是用于控制許多過(guò)程的控制系統(tǒng)。PID 代表 3 個(gè)進(jìn)程。
- P-比例
- I-積分
- D-導(dǎo)數(shù)
每個(gè)系統(tǒng)都有輸入和輸出。同樣這個(gè)控制系統(tǒng)也有一些輸入。在這個(gè)控制系統(tǒng)中,即偏離穩(wěn)定狀態(tài)。我們稱之為錯(cuò)誤。在我們的機(jī)器人中,誤差是垂直平面的傾斜角。如果機(jī)器人是平衡的,那么傾斜角為零。所以誤差值將為零。因此PID系統(tǒng)的輸出為零。該系統(tǒng)包括三個(gè)獨(dú)立的數(shù)學(xué)過(guò)程。
- 第一個(gè)是數(shù)字增益的乘法誤差。這種增益通常稱為 Kp。
P=誤差*Kp
- 第二個(gè)是在時(shí)域中生成誤差的積分,并將其與一些增益相乘。這種增益稱為 Ki
I = 積分(誤差)* Ki
- 第三個(gè)是時(shí)域誤差的導(dǎo)數(shù),并將其乘以一定量的增益。該增益稱為 Kd
D=(d(誤差)/dt)*kd
添加上述操作后,我們得到最終輸出
輸出=P+I+D
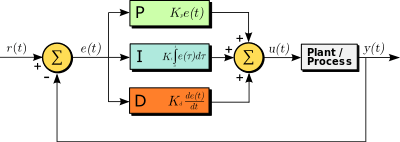
因?yàn)镻部分機(jī)器人可以得到與偏差成正比的穩(wěn)定位置。我部分計(jì)算了誤差與時(shí)間圖的面積。所以它試圖讓機(jī)器人始終準(zhǔn)確地穩(wěn)定位置。D 部分測(cè)量時(shí)間與誤差曲線的斜率。如果誤差增加,則該值為正。如果誤差在減小,則該值為負(fù)。因此,當(dāng)機(jī)器人移動(dòng)到穩(wěn)定位置時(shí),反應(yīng)速度會(huì)降低,這將有助于消除不必要的超調(diào)。
PID 功能的輸出限制在 0-255 范圍(8 位 PWM 分辨率),并將作為 PWM 信號(hào)饋送到電機(jī)。
硬件設(shè)置
現(xiàn)在這是硬件設(shè)置部分。機(jī)器人的設(shè)計(jì)取決于你。當(dāng)您設(shè)計(jì)機(jī)器人的身體時(shí),您必須考慮它關(guān)于位于電機(jī)軸的垂直軸對(duì)稱。電池組位于下方。因此機(jī)器人很容易平衡。在我們的設(shè)計(jì)中,我們將 Magicbit 板垂直固定在機(jī)身上。我們使用了兩個(gè) 12V 齒輪電機(jī)。但是您可以使用任何類型的齒輪電機(jī)。這取決于您的機(jī)器人尺寸。
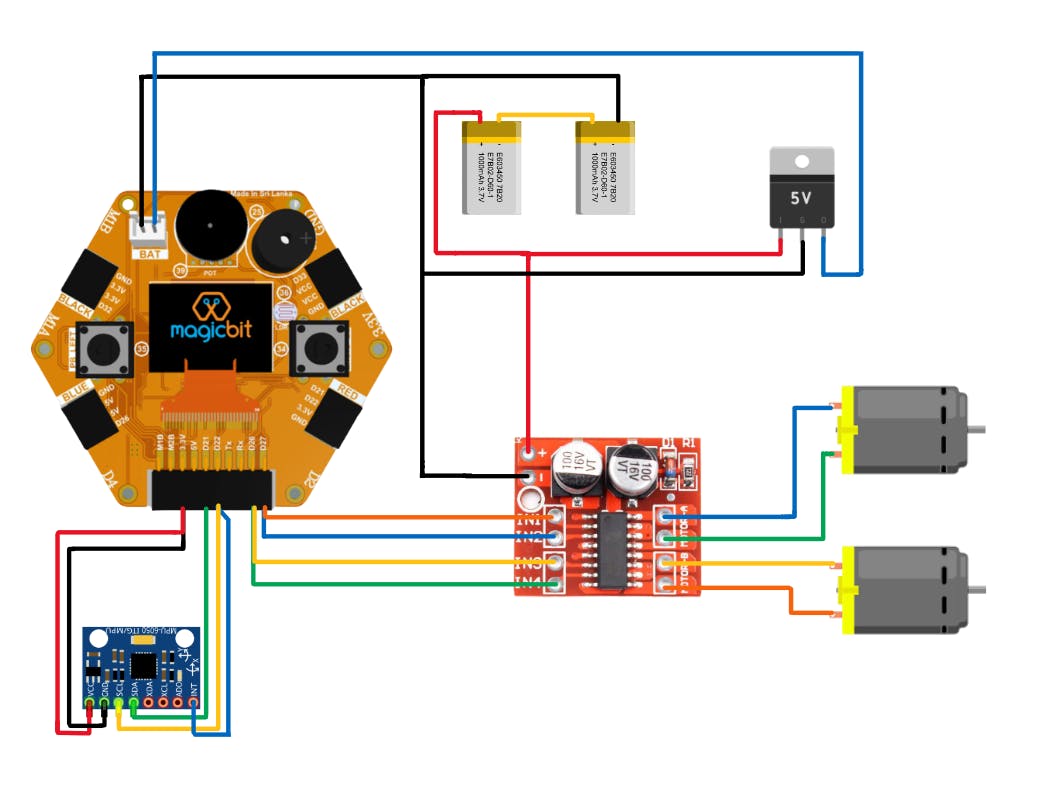
當(dāng)我們討論電路時(shí),它由 7.4V 鋰電池供電。Magicbit 使用 5V 供電。因此我們使用 7805 穩(wěn)壓器將電池電壓調(diào)節(jié)到 5V。在更高版本的 Magicbit 中,不需要該調(diào)節(jié)器。因?yàn)樗墓╇婋妷焊哌_(dá) 12V。我們直接為電機(jī)驅(qū)動(dòng)器提供 7.4V。
根據(jù)下圖連接所有組件。
軟件設(shè)置
在代碼中,我們使用 PID 庫(kù)來(lái)計(jì)算 PID 輸出。
為了獲得更好的傳感器讀數(shù),我們使用了 DMP 庫(kù)。DMP 代表數(shù)字運(yùn)動(dòng)過(guò)程。這是 MPU6050 的內(nèi)置功能。該芯片集成了運(yùn)動(dòng)處理單元。所以需要閱讀和分析。在它向微控制器(在本例中為 Magicbit(ESP32))生成無(wú)噪聲準(zhǔn)確輸出之后。但是在微控制器方面有很多工作來(lái)獲取讀數(shù)并計(jì)算角度。簡(jiǎn)單來(lái)說(shuō),我們使用了 MPU6050 DMP 庫(kù)。
要安裝庫(kù),在 Arduino 菜單中轉(zhuǎn)到工具-> 包含庫(kù)->add.zip 庫(kù)并選擇您下載的庫(kù)文件。
在代碼中,您必須正確更改設(shè)定點(diǎn)角度。PID 常數(shù)值因機(jī)器人而異。因此,在調(diào)整時(shí),首先將 Ki 和 Kd 值設(shè)置為零,然后增加 Kp,直到您獲得更好的反應(yīng)速度。更多的 Kp 會(huì)導(dǎo)致更多的過(guò)沖。然后增加 Kd 值。總是以很少的量增加它。該值通常低于其他值。現(xiàn)在增加 Ki 直到你有很好的穩(wěn)定性。
- 二輪自平衡機(jī)器人開(kāi)源設(shè)計(jì)
- 自平衡機(jī)器人的構(gòu)建
- 使用Arduino的自平衡機(jī)器人 0次下載
- 基于Arduino UNO的自平衡機(jī)器人 0次下載
- 帶有BT Web控制的Arduino自平衡機(jī)器人
- 利用麥克風(fēng)和音符來(lái)控制自平衡機(jī)器人
- 使用TensorFlow對(duì)自平衡機(jī)器人進(jìn)行手勢(shì)控制
- 如何制作WiFi控制的自平衡機(jī)器人
- Arduino平衡機(jī)器人盾牌代碼
- 迷你平衡機(jī)器人
- 畢業(yè)設(shè)計(jì)--球上自平衡機(jī)器人
- 基于JJBoover的遠(yuǎn)程控制ARDUNO自平衡機(jī)器人資料下載 2次下載
- 可載人自平衡移動(dòng)機(jī)器人控制系統(tǒng)設(shè)計(jì)李京濤 0次下載
- DIY:簡(jiǎn)簡(jiǎn)單單自制平衡機(jī)器人 25次下載
- 自平衡人形機(jī)器人動(dòng)作控制器的設(shè)計(jì)
- 電機(jī)轉(zhuǎn)子動(dòng)平衡機(jī)使用過(guò)程中的常見(jiàn)問(wèn)題 929次閱讀
- 烤箱自平衡門(mén)鉸鏈機(jī)構(gòu)的設(shè)計(jì) 1760次閱讀
- 利用STM32實(shí)現(xiàn)自平衡機(jī)器人功能項(xiàng)目 873次閱讀
- 基于STM32的自平衡機(jī)器人設(shè)計(jì) 802次閱讀
- 基于STM32的球上自平衡機(jī)器人設(shè)計(jì)方案 1855次閱讀
- 如何使用Arduino制造一個(gè)自動(dòng)平衡機(jī)器人 4429次閱讀
- 基于使用A4988驅(qū)動(dòng)程序和HC-05 bt模塊構(gòu)建自平衡機(jī)器人 2007次閱讀
- 基于ATmage128單片機(jī)和紅外測(cè)距傳感器實(shí)現(xiàn)自平衡機(jī)器人系統(tǒng)的設(shè)計(jì) 2272次閱讀
- 基于ATmega128單片機(jī)實(shí)現(xiàn)自平衡機(jī)器人控制系統(tǒng)的應(yīng)用方案 3851次閱讀
- 聯(lián)想發(fā)布自研工業(yè)機(jī)器人 2601次閱讀
- 面對(duì)疫情 醫(yī)療機(jī)器人能幫上什么忙? 2126次閱讀
- 真空潔凈機(jī)器人 6179次閱讀
- 協(xié)作機(jī)器人的起源_為什么需要協(xié)作機(jī)器人 8127次閱讀
- 簡(jiǎn)易平衡機(jī)器人制作圖解 6786次閱讀
- 軟體機(jī)器人 前所未見(jiàn)的機(jī)器人 3692次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1普中科技HC6800-EM3使用操作手冊(cè)
- 21.69 MB | 3次下載 | 2 積分
- 2PCB板EMC/EMI的設(shè)計(jì)技巧
- 0.20 MB | 3次下載 | 免費(fèi)
- 32024PMIC市場(chǎng)洞察
- 2.23 MB | 2次下載 | 免費(fèi)
- 4MSP430?閃存器件引導(dǎo)加載程序(BSL)
- 1.45MB | 2次下載 | 免費(fèi)
- 5PL4807單節(jié)鋰離子電池充電器中文手冊(cè)
- 1.36 MB | 2次下載 | 免費(fèi)
- 6LTH7充電電路和鋰電池升壓5V輸出電路原理圖
- 0.04 MB | 1次下載 | 免費(fèi)
- 7HT2120兩節(jié)鋰電池保護(hù)板電路
- 0.22 MB | 1次下載 | 免費(fèi)
- 8BQ77207EVM用戶指南
- 865.23KB | 1次下載 | 免費(fèi)
本月
- 1XL4015+LM358恒壓恒流電路圖
- 0.38 MB | 151次下載 | 1 積分
- 2PCB布線和布局電路設(shè)計(jì)規(guī)則
- 0.40 MB | 33次下載 | 免費(fèi)
- 3智能門(mén)鎖原理圖
- 0.39 MB | 13次下載 | 免費(fèi)
- 4GB/T4706.1-2024 家用和類似用途電器的安全第1部分:通用要求
- 7.43 MB | 11次下載 | 1 積分
- 5JESD79-5C_v1.30-2024 內(nèi)存技術(shù)規(guī)范
- 2.71 MB | 10次下載 | 免費(fèi)
- 6elmo直線電機(jī)驅(qū)動(dòng)調(diào)試細(xì)則
- 4.76 MB | 9次下載 | 6 積分
- 7WIFI智能音箱原理圖完整版
- 0.09 MB | 7次下載 | 10 積分
- 8PC1013三合一快充數(shù)據(jù)線充電芯片介紹
- 1.03 MB | 7次下載 | 免費(fèi)
總榜
- 1matlab軟件下載入口
- 未知 | 935115次下載 | 10 積分
- 2開(kāi)源硬件-PMP21529.1-4 開(kāi)關(guān)降壓/升壓雙向直流/直流轉(zhuǎn)換器 PCB layout 設(shè)計(jì)
- 1.48MB | 420061次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233084次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191367次下載 | 10 積分
- 5十天學(xué)會(huì)AVR單片機(jī)與C語(yǔ)言視頻教程 下載
- 158M | 183332次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81581次下載 | 10 積分
- 7Keil工具M(jìn)DK-Arm免費(fèi)下載
- 0.02 MB | 73806次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65985次下載 | 10 積分





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論