 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
介紹:
消毒機器人的概念來源于噴霧門或被稱為消毒門的概念。如今,許多國家都使用噴霧門,認為它可以通過在進入任何地方之前對人員進行消毒來防止冠狀病毒的傳播。
最終,世界衛生組織(WHO)表示:“在全身噴灑酒精或氯不會殺死已經進入身體的病毒”;因此,這無助于控制冠狀病毒病例。此外,世衛組織還提到,噴灑這些物質可能對衣服或眼睛和嘴巴造成危險,但有利于表面消毒;因此,在每個人都接觸到表面時,對表面進行消毒比對人進行消毒更重要。因此,對人周圍的物體進行消毒將消滅其上的任何病毒,控制病毒的傳播,保護人們。
因此,有幾種方法可以對周圍環境進行消毒;例如,讓一群人用消毒槍進行消毒。然而,這可能是一個昂貴的過程,因為消毒必須是冠狀病毒病例的日常過程,如果是商場、大學或其他大型場所,對整個地方進行消毒可能需要時間。因此,消毒機器人被編程為自動對各處進行消毒;當一個人打開按鈕時,它會四處移動并旋轉,因為它包含設法不撞到任何東西的傳感器。此外,消毒機器人可以在多個地方使用;例如商場、咖啡廳、學校、大學、醫院,也可以在家里使用。
材料
為了建造機器人,需要一些材料和制造方法。材料的選擇是為了達到設計要求。我們選擇了經濟實惠的材料來滿足我們的原型設計要求(可負擔性)。
數量:1
價格:950 埃及鎊
- 鋰電池充電器3s
數量:1
來源:電子商城
價格:350 埃及鎊
- 微型金屬齒輪電機 HP 6V 298:1
數量:2
來源:電子商城
價格:190 埃及鎊
- 微型金屬齒輪電機支架對
數量:1
來源:電子商城
價格:50 埃及鎊
- 輪子 42×19mm 一對
數量:1
來源:電子商城
價格:30 埃及鎊
- Arduino納米板
數量:1
來源:電子商城
價格:110 埃及鎊
- 面包板
數量:1
來源:電子商城
價格:30 埃及鎊
- HL-52S 繼電器模塊
數量:1
來源:電子商城
價格:40 埃及鎊
- H 橋 L298 雙電機驅動器
數量:1
來源:電子商城
價格:65 埃及鎊
- 銳距傳感器 GP2Y0A41SK0F (4 - 30cm)
數量:3
來源:電子商城
價格:100 埃及鎊
- 電動泵
數量:1
來源:電子商城
價格:150 埃及鎊
- 水傳感器
數量:1
來源:電子商城
價格:35 埃及鎊
- 熱收縮
來源:電子商城
價格:15 埃及鎊
- 發光二極管
數量:2
來源:電子商城
價格:5 埃及鎊
- 開/關
數量:1
來源:電子商城
價格:2.50 埃及鎊
- M3螺栓(直徑3mm)
數量:20
來源:電子商城
價格:10 埃及鎊
- M3螺母
數量:20
來源:電子商城
價格:10 埃及鎊
- #8-32 螺絲
數量:2
來源:電子商城
價格:2 埃及鎊
?
總成本 = 2, 544.5 EGP
?
材料選擇:
解放軍:
這種熱塑性塑料價格實惠,也是選擇它的最重要原因,它不會被氯和酒精等清潔消毒劑腐蝕。
我們選擇這種類型的一些特點:
- 它是一種熱塑性塑料
如果發生任何錯誤,重新加熱材料,它可以重新成型。
- 易于打印
由于溫度靈活,翹曲很小,并且以其打印質量而聞名。
- 環保塑料
具有良好的生物降解性,在水中48個月生物降解,工業作曲家50天生物降解。
?
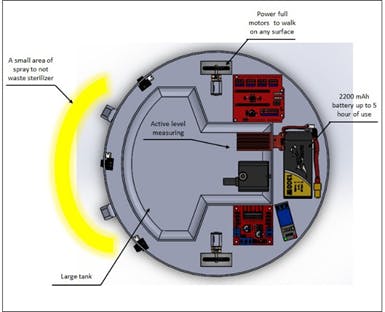
該設計:
?
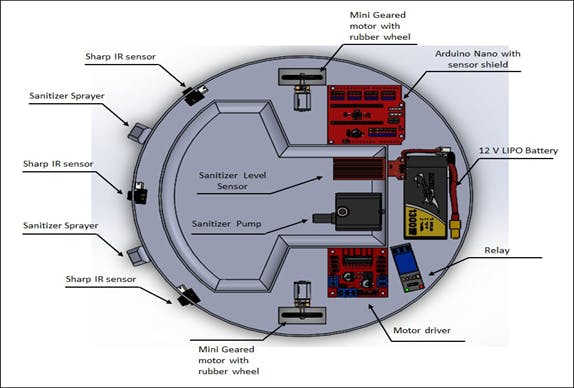
o 大型滅菌罐 0.5 L
o 強大的電機幫助機器人在任何表面上移動
o 2200 mAh 大電池,可保持運行 5 小時
o 滅菌罐空時自動關閉
o 消毒噴霧器覆蓋機器人下方的整個區域
o 3 個紅外傳感器,可在室內自主移動
?
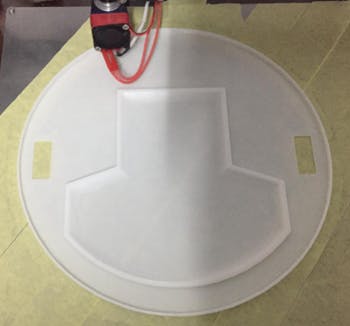
制造工藝
? 設計完成后,所有部件都可以進行 3D 打印。
? 機器人由兩部分組成。
? 打印設置:
0.32 毫米層高
1.2 毫米外殼厚度
30% 填充密度
190°C印刷溫度
支持類型無處不在
回縮:50 毫米/秒 0.7 毫米
打印速度 60mm/s
?
?
集會:
集成CAD設計,組裝整個機器人僅需30分鐘。
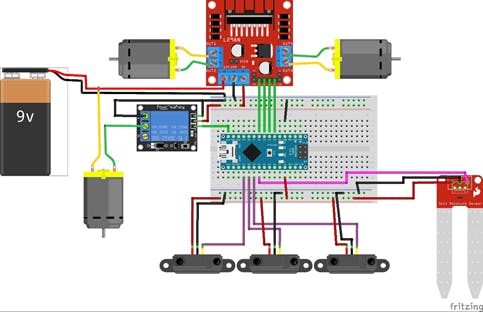
電路組裝
阿杜諾:
- 從銳距傳感器接單
- 給H橋下達命令
泵
- 通過繼電器間接接受 Arduino 的訂單
水傳感器
- 接受坦克的訂單
- 給阿杜諾下訂單
尖銳的距離傳感器
- 接受周圍的訂單
- 給阿杜諾下訂單
H橋
- 接受 Arduino 的訂單
- 給電機下訂單
開/關
- 聽命于人
?
這個怎么運作?
- 移動
1. 當前面和側面的銳利紅外傳感器感應到附近有任何東西時,它會向Arduino發出命令向左或向右移動。
2. Arduino 然后發送 H 橋命令。
3. H橋然后將其發送到電機。
4. 然后它改變方向。
- 消毒液完成
1.水傳感器向Arduino發送命令
2.當傳感器信號低于閾值時,表示罐內液位低。
3. 繼電器關閉泵。
4. 泵將停止噴涂。
- 當機器人移動時,泵會不斷噴灑消毒劑。
?
Arduino代碼
//Distance Analog Sensors (Sharp)
const int SD1 = 2; //left sensor
const int SD2 = 1; //right sensor
const int SD3 = 4; //front side sensor
const int SD4 = 3; //front side sensor
// fluid sensor
const int tank_level = 5; //fluid sensor
// Define motor pins
#define in1 6
#define in2 7
#define in3 4
#define in4 5
const int pump = 3; // Pump relay pin
int green_led = 12; // geen led indicator
int red_led = 9; // red led indicator
void setup() {
// define motor pins as OUTPUT
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
// define led indicator as output
pinMode(green_led, OUTPUT);
pinMode(red_led, OUTPUT);
// define sharp ir sensor as input
pinMode(SD1, INPUT);
pinMode(SD2, INPUT);
pinMode(SD3, INPUT);
pinMode(SD4, INPUT);
// define pump as an output
pinMode(pump, OUTPUT);
// start serial comunication to print sensor values
Serial.begin(9600);
}
// turn the robot left
void left() {
digitalWrite ( in1 , HIGH);
digitalWrite ( in2 , LOW);
digitalWrite ( in3 , HIGH);
digitalWrite ( in4 , LOW);
digitalWrite ( red_led , HIGH);
digitalWrite ( green_led , LOW);
}
// go back
void back() {
digitalWrite ( in1 , HIGH);
digitalWrite ( in2 , LOW);
digitalWrite ( in3 , HIGH);
digitalWrite ( in4 , LOW);
digitalWrite ( red_led , LOW);
digitalWrite ( green_led , LOW);
}
// go forward
void forward() {
digitalWrite ( in1 , LOW);
digitalWrite ( in2 , HIGH);
digitalWrite ( in3 , HIGH);
digitalWrite ( in4 , LOW);
digitalWrite ( green_led , HIGH);
digitalWrite ( red_led , LOW);
}
// turn right
void right() {
digitalWrite ( in1 , LOW);
digitalWrite ( in2 , HIGH);
digitalWrite ( in3 , LOW);
digitalWrite ( in4 , HIGH);
digitalWrite ( red_led , HIGH);
digitalWrite ( green_led , LOW);
}
// stop the robot
void STOP() {
digitalWrite ( in1 , LOW);
digitalWrite ( in2 , LOW);
digitalWrite ( in3 , LOW);
digitalWrite ( in4 , LOW);
}
void loop() {
// start to read data from ir sensor
float volts_front_1 = analogRead(SD3) * 0.0048828125; // value from sensor * (5/1024)
int dist_front_1 = 13 * pow(volts_front_1, -1); // worked out from datasheet graph
//**********************
float volts_front_2 = analogRead(SD4) * 0.0048828125; // value from sensor * (5/1024)
int dist_front_2 = 13 * pow(volts_front_2, -1); // worked out from datasheet graph
//**********************
float volts_right = analogRead(SD2) * 0.0048828125; // value from sensor * (5/1024)
int dist_right = 13 * pow(volts_right , -1); // worked out from datasheet graph
//**********************
float volts_left = analogRead(SD1) * 0.0048828125; // value from sensor * (5/1024)
int dist_left = 13 * pow(volts_left , -1); // worked out from datasheet graph
Serial.println(dist_front_2);
//Serial.println(sdSHARP(SD2));
if (dist_front_1 && dist_front_2 > 8) { // go forward
forward();
// turn the pump on
digitalWrite(pump, HIGH);
Serial.println ("forward");
}
if ( dist_front_2 < 5) {
right();
// turn the pump on
digitalWrite(pump, HIGH);
Serial.println ("rigth ");
}
if ( dist_front_1 < 5) {
left();
// turn the pump on
digitalWrite(pump, HIGH);
Serial.println ("left");
}
else {
}
//delay(100);
}
結論
機器人是非常重要的發明,它可以在不傷害任何人的情況下清潔地方。它不消耗時間,也不需要專家來操作它。
這個機器人可以是任何尺寸,但我們所做的尺寸允許我們將它移動到任何地方并且可以隨身攜帶。此外,它是一種低成本的發明,任何人都可以擁有它;即使在家里。
?

?

?
- 電暈消毒紫外線機器人開源分享
- 消毒機器人Hanth-x1開源分享
- 使用UVC和垃圾場材料的自主消毒機器人
- Pinaka:UVD(紫外線消毒)機器人開源分享
- LIDIA光消毒機開源分享
- UV-C消毒機器人開源分享
- 全自動UV-C消毒機器人開源分享
- 紫外線消毒機器人
- Roboboi智能紫外線消毒機器人
- Amabie消毒機器人開源分享
- 自主UVC消毒機器人開源
- 低成本機器人消毒系統開源分享
- 紫外線燈消毒機器人開源分享
- 自動地板消毒機器人
- 瞳步消毒機器人方案
- 字節發布機器人領域首個開源視覺-語言操作大模型,激發開源VLMs更大潛能 360次閱讀
- 機器人技術中常用的路徑規劃算法的開源庫 843次閱讀
- 機器人項目涉及的技術 857次閱讀
- 利用STM32實現自平衡機器人功能項目 873次閱讀
- 面對疫情 醫療機器人能幫上什么忙? 2126次閱讀
- dfrobotSparki機器人套裝簡介 2064次閱讀
- 醫用機器人的定義_醫用機器人發展 3122次閱讀
- 協作機器人的起源_為什么需要協作機器人 8127次閱讀
- 簡易機器人制作圖解 1w次閱讀
- 昆蟲機器人diy詳解 6051次閱讀
- 如何區分機器人、協作機器人和移動機器人? 6828次閱讀
- 軟體機器人 前所未見的機器人 3692次閱讀
- 機器人的最佳編程語言是什么?機器人十大流行編程語言匯總 3.4w次閱讀
- 機器人自動化工程項目方案設計包括的6個步驟解析 1.2w次閱讀
- 11個機器學習開源項目 2767次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數據手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網監
工商網監
評論