 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
描述
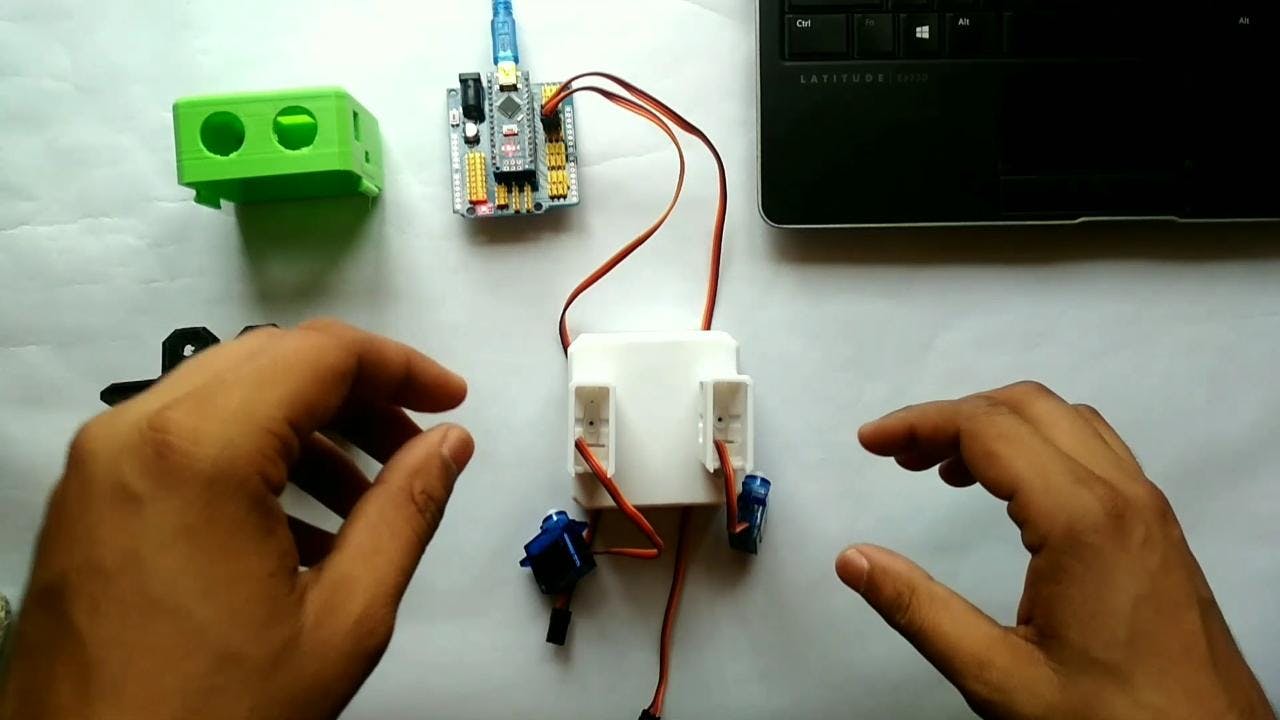
這是最簡單的 Arduino 機器人。這個 Arduino 機器人的名字是 Otto Robot。初學者可以通過簡單的步驟構建它。所有代碼和庫都在我的 github 頁面上給出。
讓我們開始這個剪切的小 arduino 項目。
第 1 步:要求
?
?
?
?

?
1 / 13
?
- Robot Body,您可以在線購買,也可以自己打印,從這里下載 stl 文件。
- 四個 SG90 舵機
- Arduino納米
- Arduino 納米編程電纜。
- arduino nano 的擴展屏蔽。
- 超聲波模塊。
- 基于凝膠的超級膠水。
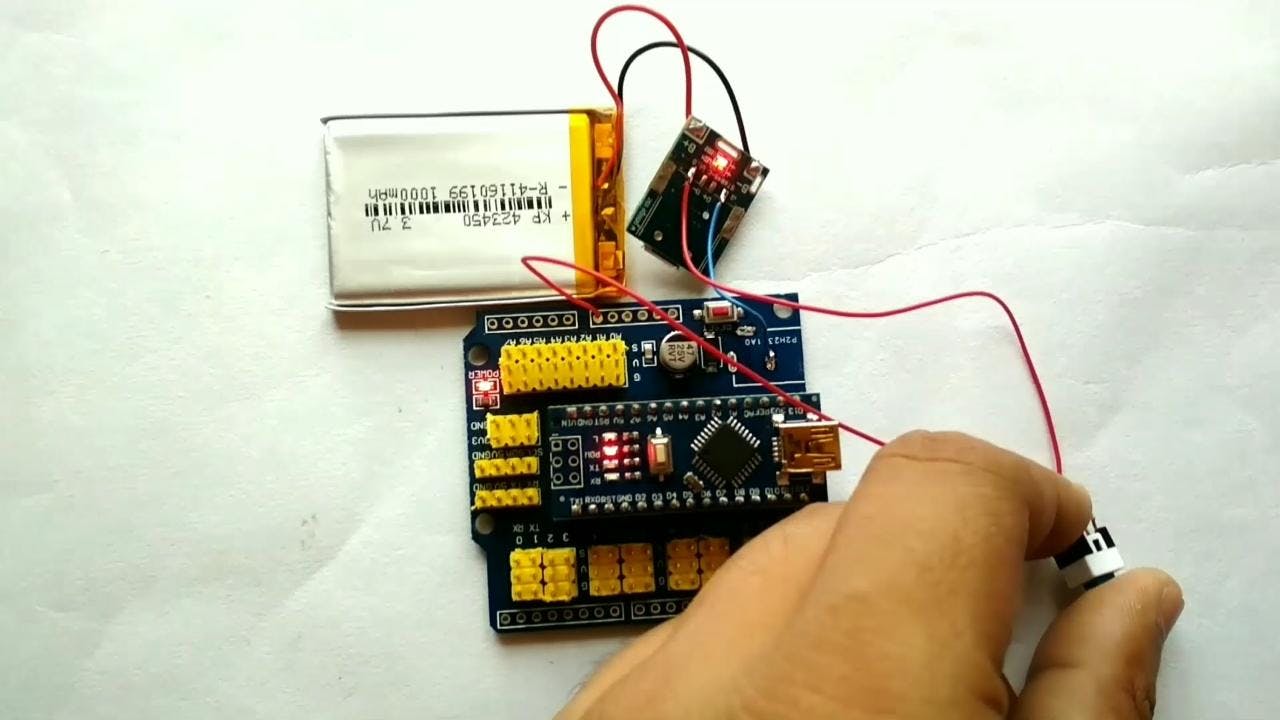
- 134N3P充電升壓模塊。
- 3.7V 1000mAh 電池。
- 螺絲刀和螺絲。
- 伺服器附帶的伺服頂部。
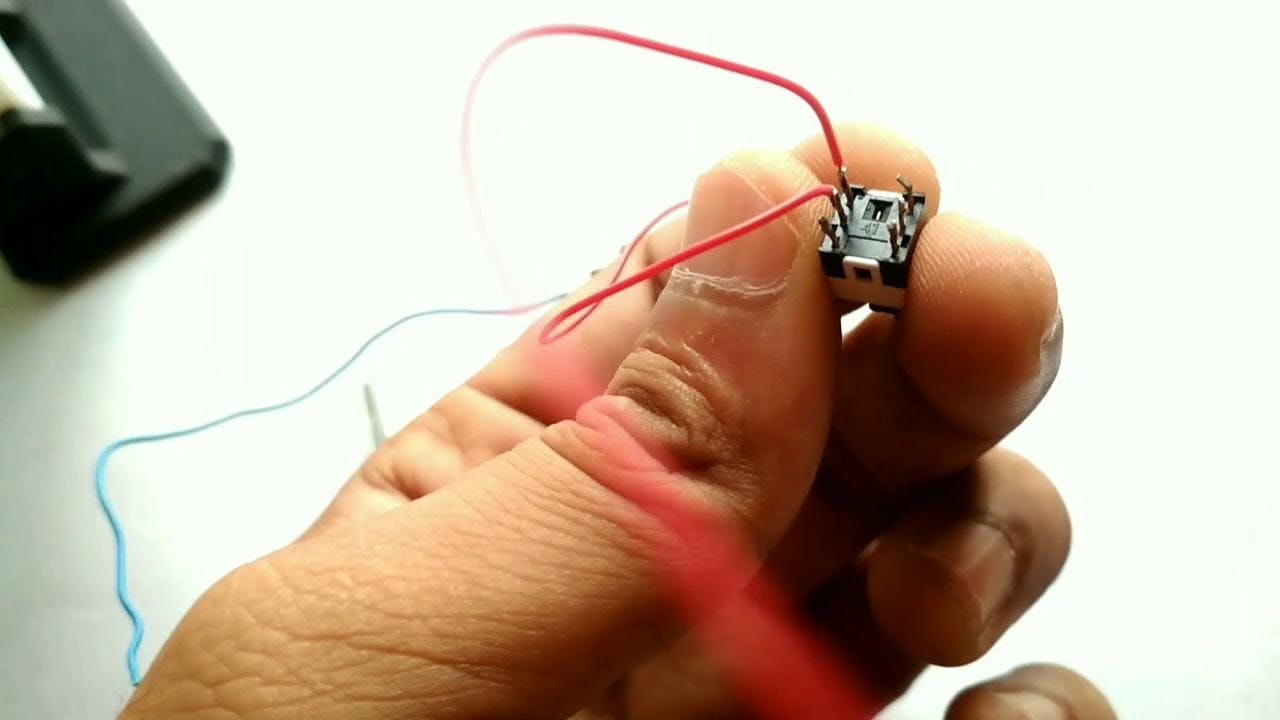
- 開/關按鈕開關。
- 一些母對母線。
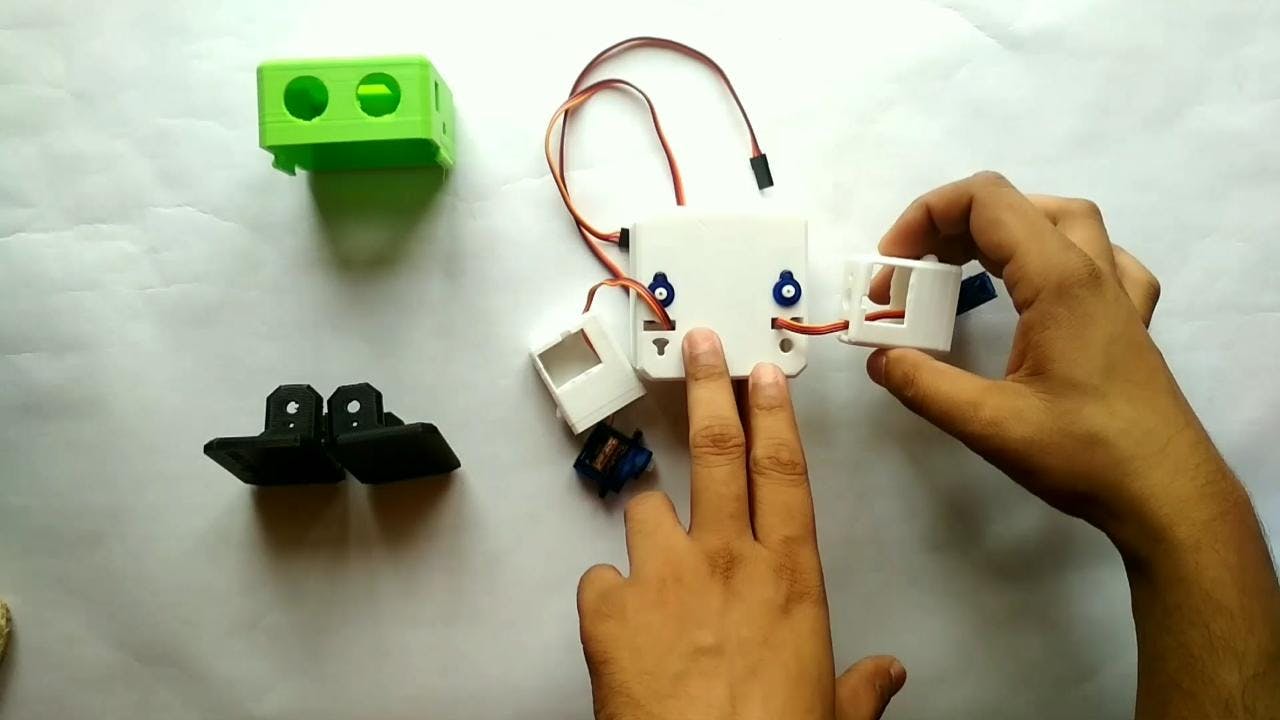
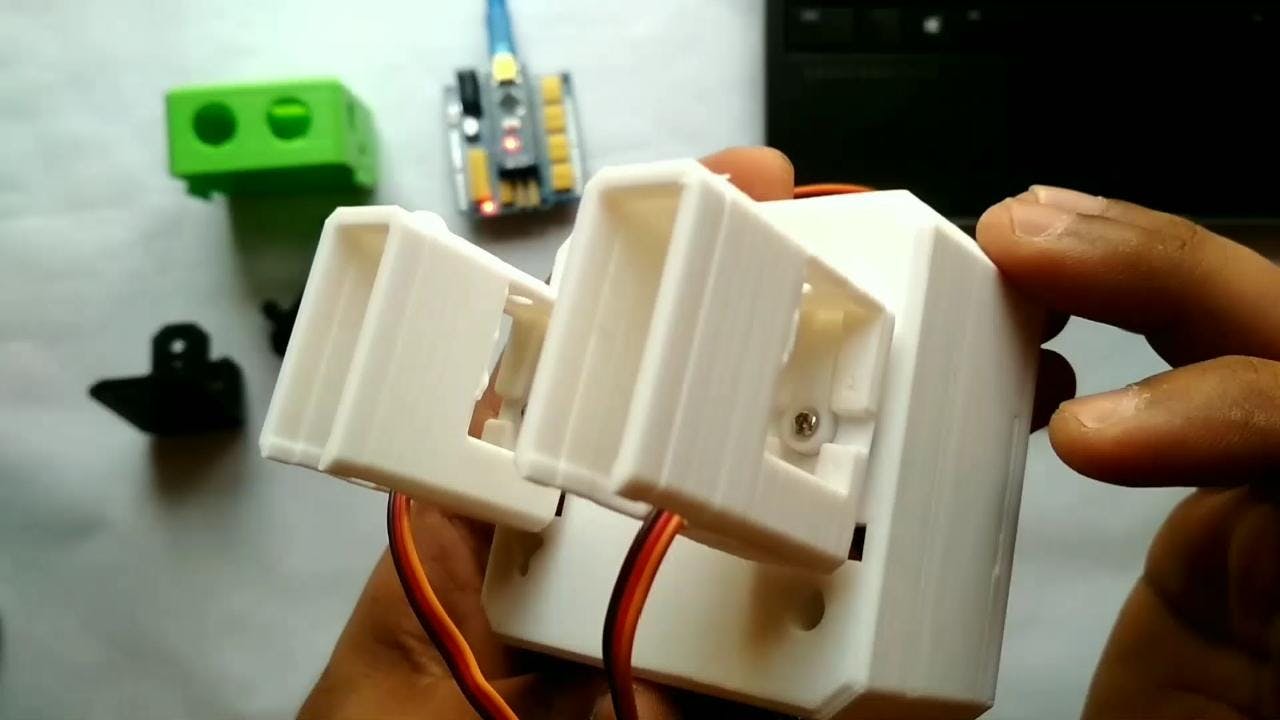
第2步:安裝腿伺服
?
?
?
?
?
1 / 2
?
- 如圖所示安裝兩個伺服。
- 擰緊。
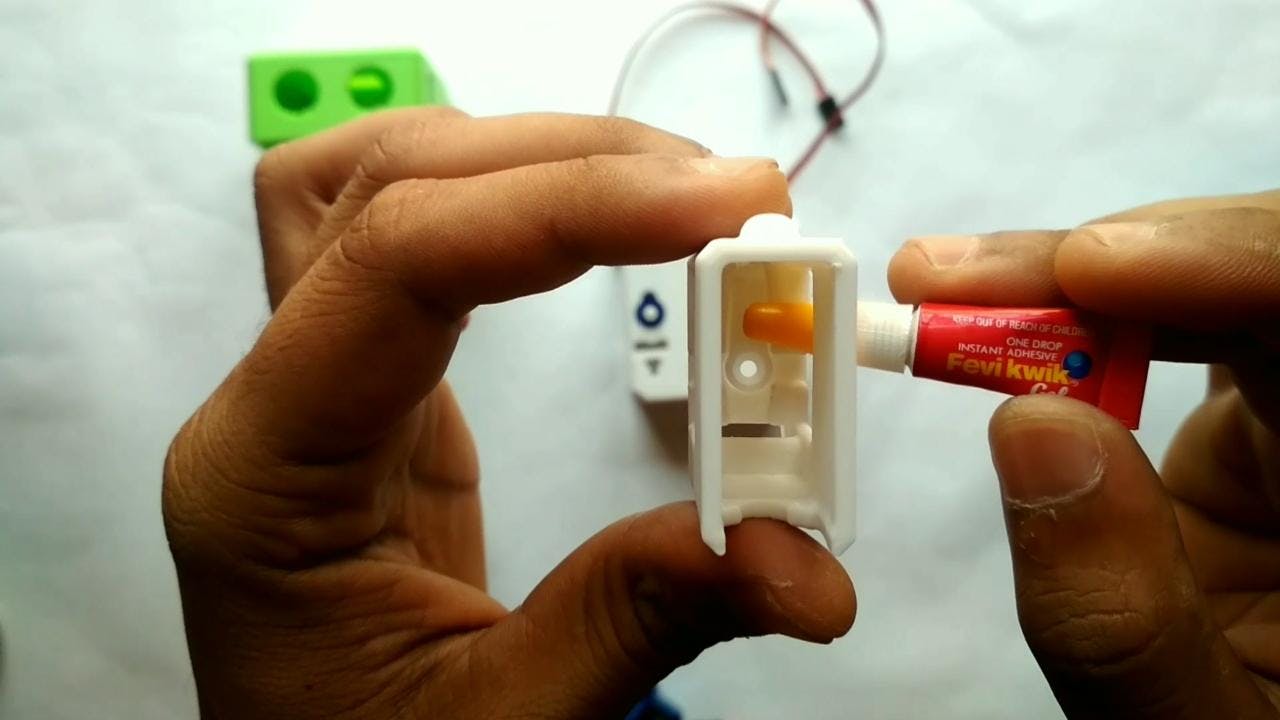
第 3 步:在腿上安裝伺服頂部
?
?
?
?
?
1 / 2
?
- 切割塑料頂部帶有伺服。
- 如圖所示,將其粘在腿的一側。
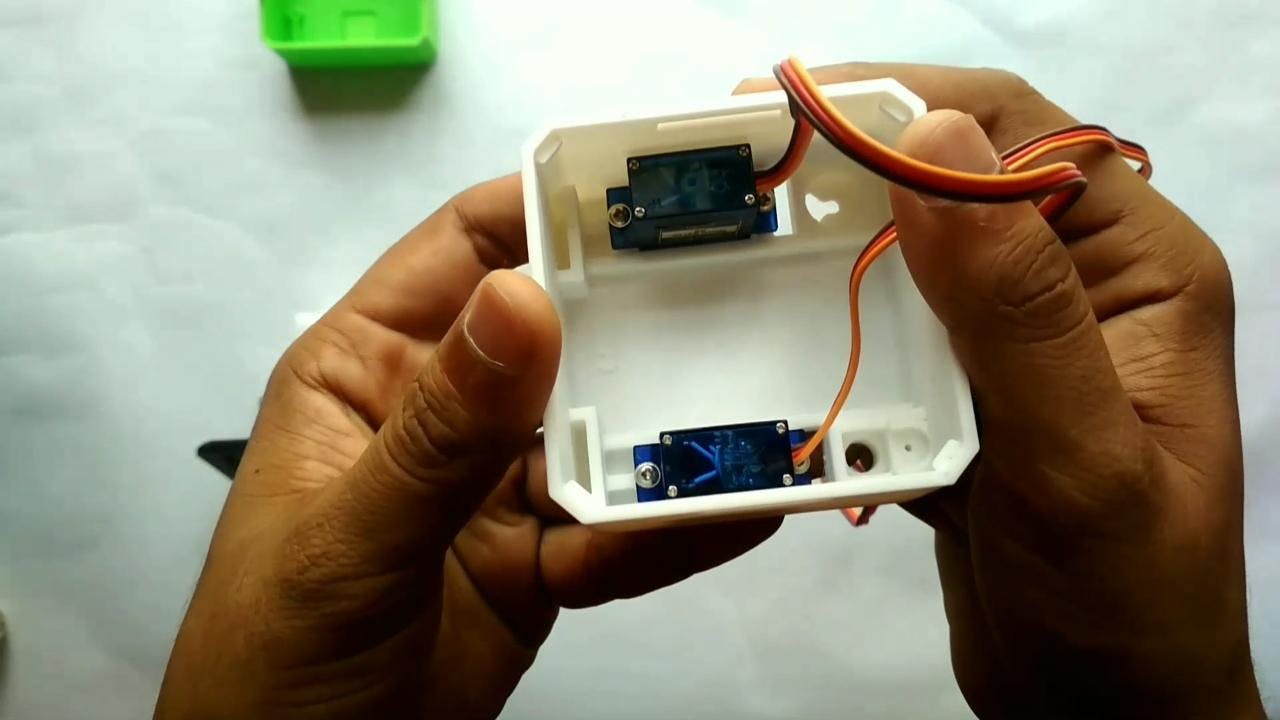
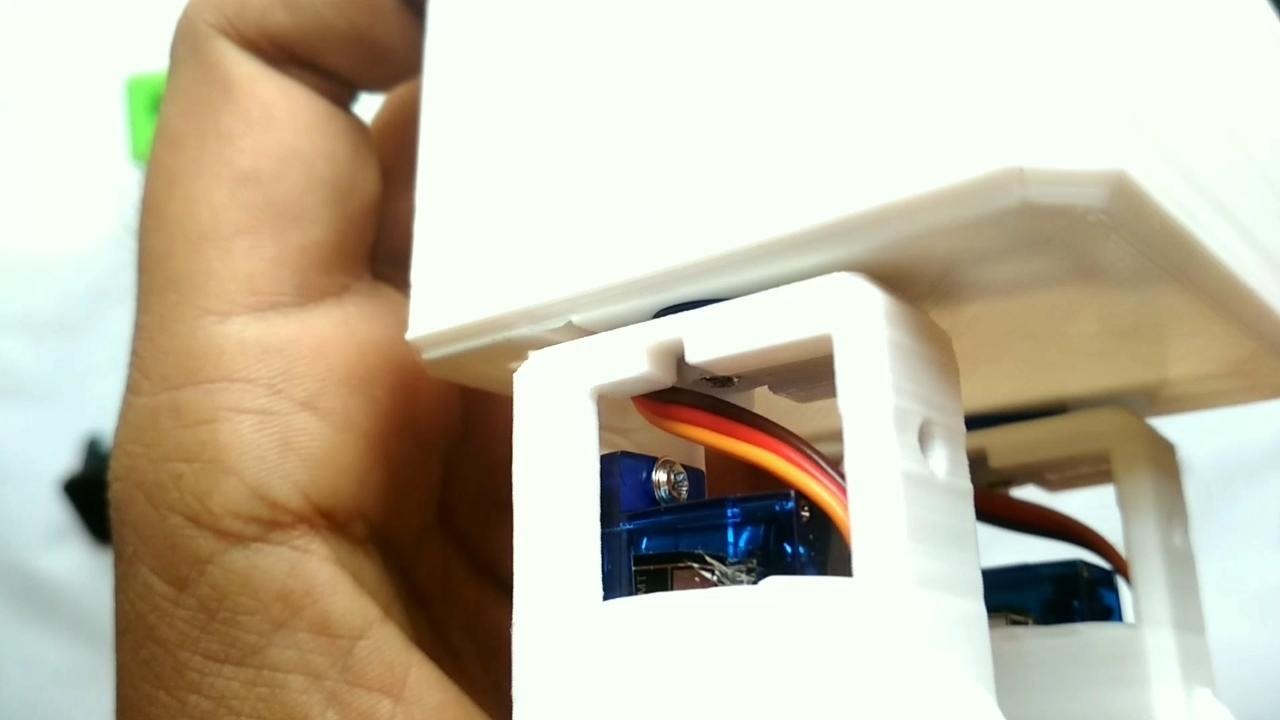
第4步:通過腳伺服線
?
?
?
?
?
1 / 4
?
- 從腿上的孔穿過伺服線
- 從機器人的底部穿過相同的電線。
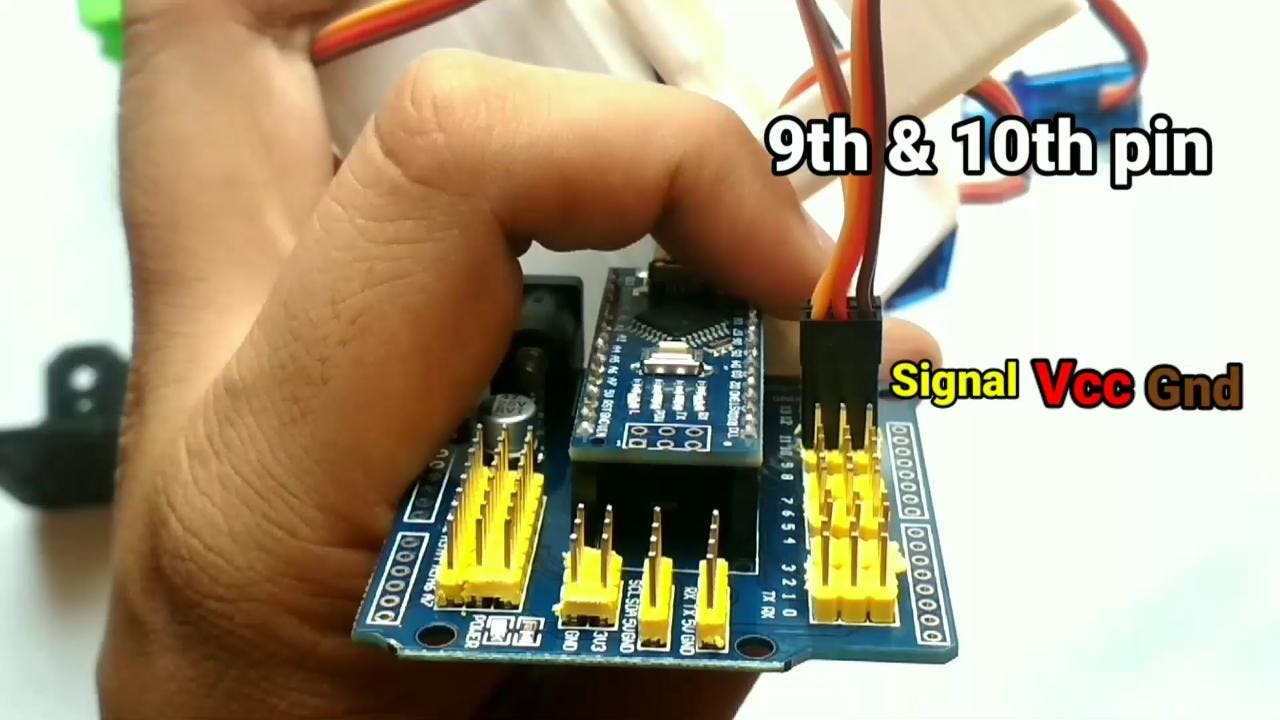
第 5 步:設置伺服 90 度連接
?
?
?
?
?
1 / 5
?
- 將腿安裝在腿伺服上。
- 拿擴展盾并插入arduino nano。
- 在第 9 和第 10 針連接兩個腿伺服。
- 確保黃線面向 arduino nano。
第 6 步:上傳代碼以設置 90 度
?
?
?
?
?
1 / 5
?
- 打開servo_pos_set代碼,你可以從這里下載。
- 連接您的 arduino 并選擇正確的 Board 和正確的端口。
- 上傳代碼,伺服將移動90 度。
- 如圖所示,從伺服器上拆下腿并將其插入垂直位置。
下載代碼:- https://github.com/vishalsoniindia/Arduino_Otto_Ro ...
________
第 7 步:擰緊腿
?
?
?
?
?
1 / 3
?
- 用螺絲刀附上磁鐵,這樣螺絲就可以粘在上面。
- 握住腿并將其擰緊。
第8步:安裝腳舵機
?
?
?
?
?
1 / 4
?
- 如圖所示拉動腳伺服線。
- 如圖所示,將腳伺服插入腿中。
- 將腳伺服擰在腿上。
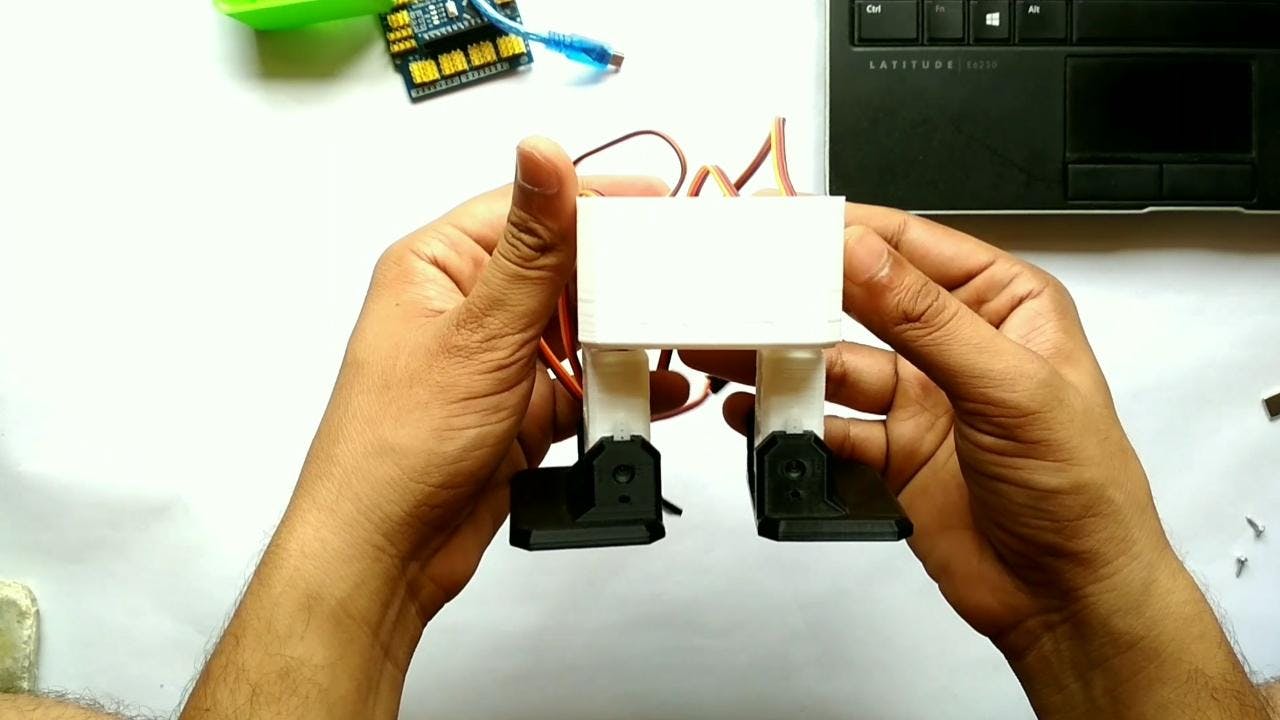
第 9 步:將其設置為 90 度并安裝腳
?
?
?
?
?
1 / 5
?
- 在第 9 和第 10 針連接腳伺服。
- 將arduino與pc連接,無需再次上傳代碼。
- 伺服移動到 90 度現(xiàn)在將伺服頂部安裝在垂直位置并擰緊它們。
- 安裝腳,首先將腳放在伺服上,并在里面放上小壓腳。
- 兩者都做。
第 10 步:134N3P 連接
?
?
?
?
?
1 / 5
?
- 從 134N3P 模塊中移除 USB。
- 在B+處連接電池正極。
- 在B-處連接電池負極。
- 連接 Gnd 和 Vcc 上的電線。
- Vcc 線通過一個開關。
第 11 步:將電池與 Arduino 連接
?
?
?
?
?
1 / 5
?
- 從擴展屏蔽中移除DC插孔。
- 如圖所示,在DC 插孔的Gnd處連接Gnd線。
- Vcc通過開關,然后將其連接到Vin引腳。
- 測試開關是否正常工作。
第 12 步:組裝機器人的頂部
?
?
?
?
?
1 / 4
?
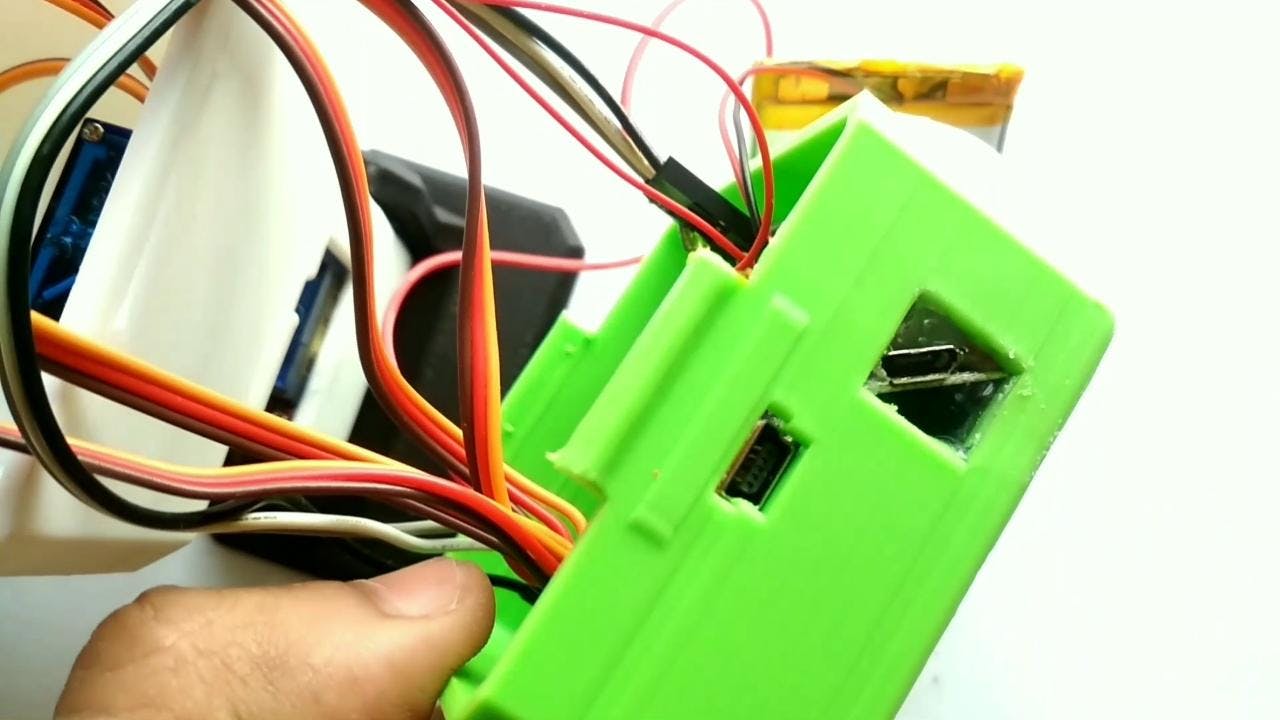
- 如圖所示安裝超聲波。
- 如圖所示安裝膨脹罩并擰緊。
- 如圖所示,用熱膠將 134N3P 模塊固定在直流插孔的位置。
步驟 13:Otto 機器人的電路連接
?
?
?
?
?
1 / 7
?
左腿伺服---------------> 8號針
右腿舵機--------------->第9針
左腳伺服---------------> 10號針
右腳伺服---------------> 11號針
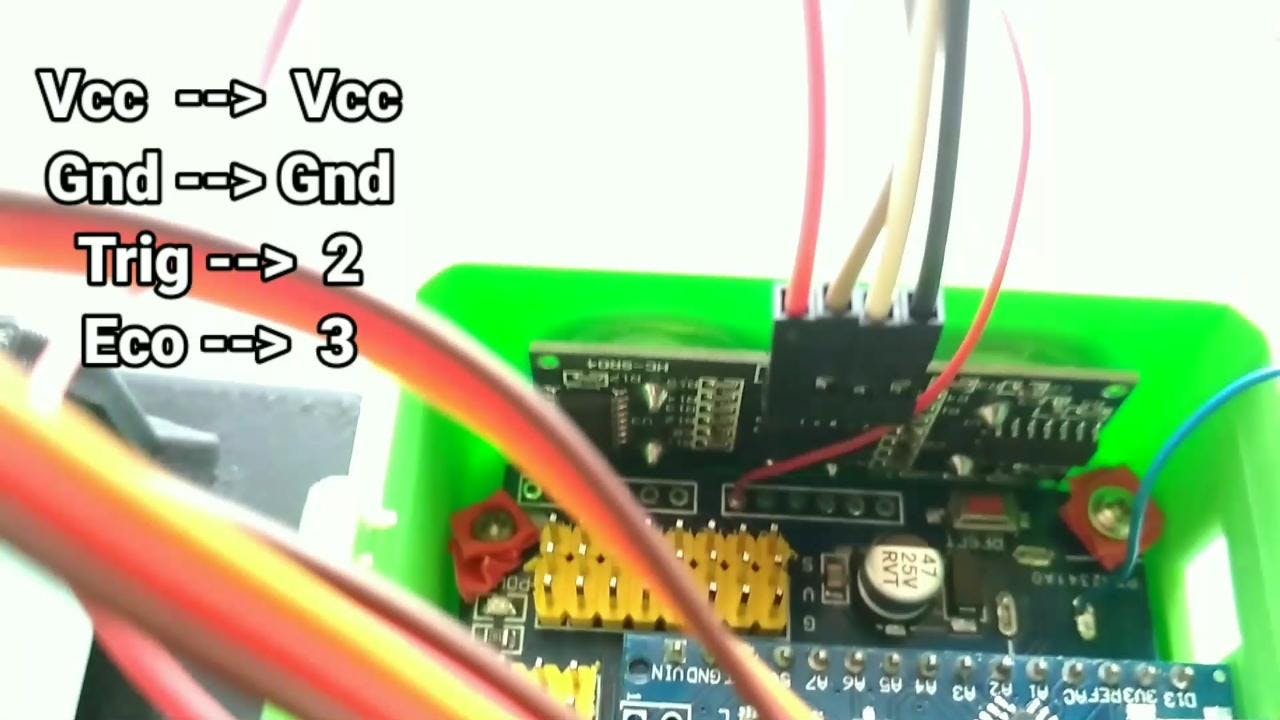
超聲波連接
Vcc ------------------> +5v
接地 ------------------> 接地
觸發(fā) -------------------> 2nd Pin
生態(tài) -------------------> 第 3 針
第 14 步:關閉機器人
?
?
?
?

?
1 / 3
?
- 如圖所示,將開關粘在里面。
- 為 Switch Cap 使用鋼筆絎縫。
- 將所有東西插入機器人并關閉它。
第 15 步:安裝庫
?
?
?
?
?
1 / 3
?
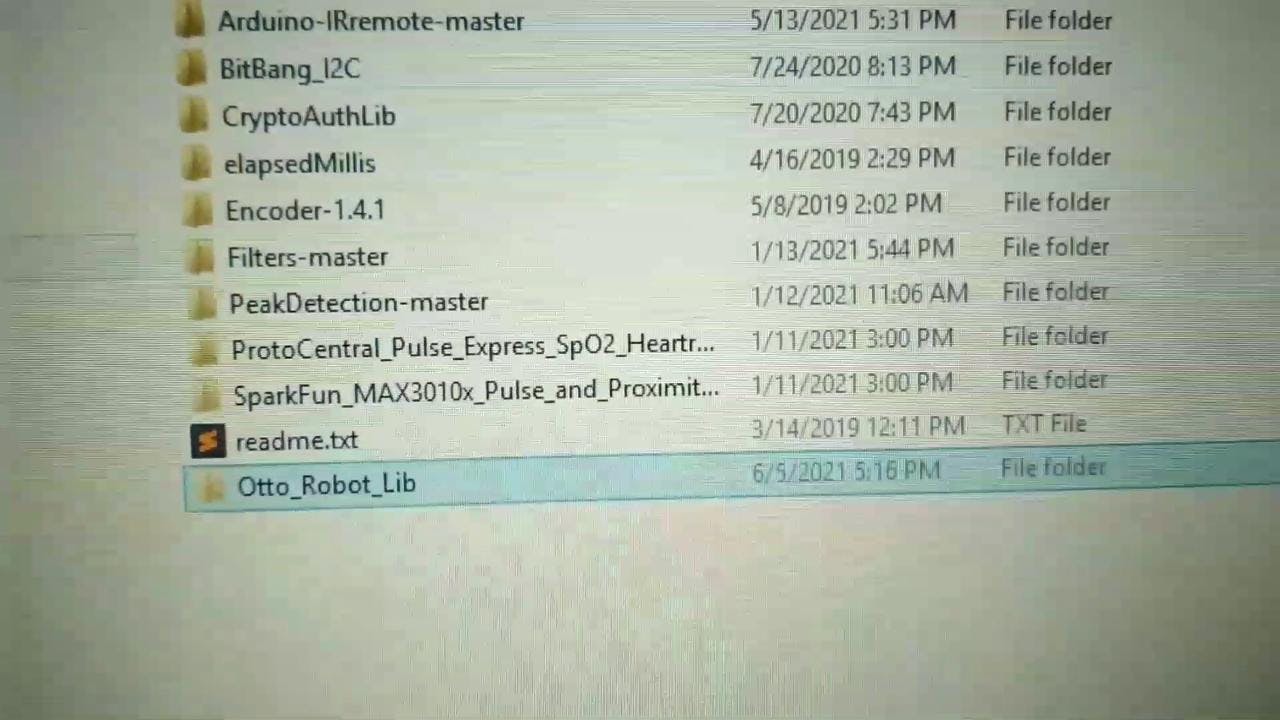
- 打開下載的文件夾,或者您可以從下面的鏈接下載。
- 轉到Otto_robot_code >> 庫 >>
- 復制Otto_Robot_Lib文件夾。
- 轉到文檔 >> Arduino >> 庫 >>
- 將文件夾粘貼到此處。
下載文件夾:- https://github.com/vishalsoniindia/Arduino_Otto_Ro ...
第 16 步:上傳代碼
?
?
?
?
?
1 / 5
?
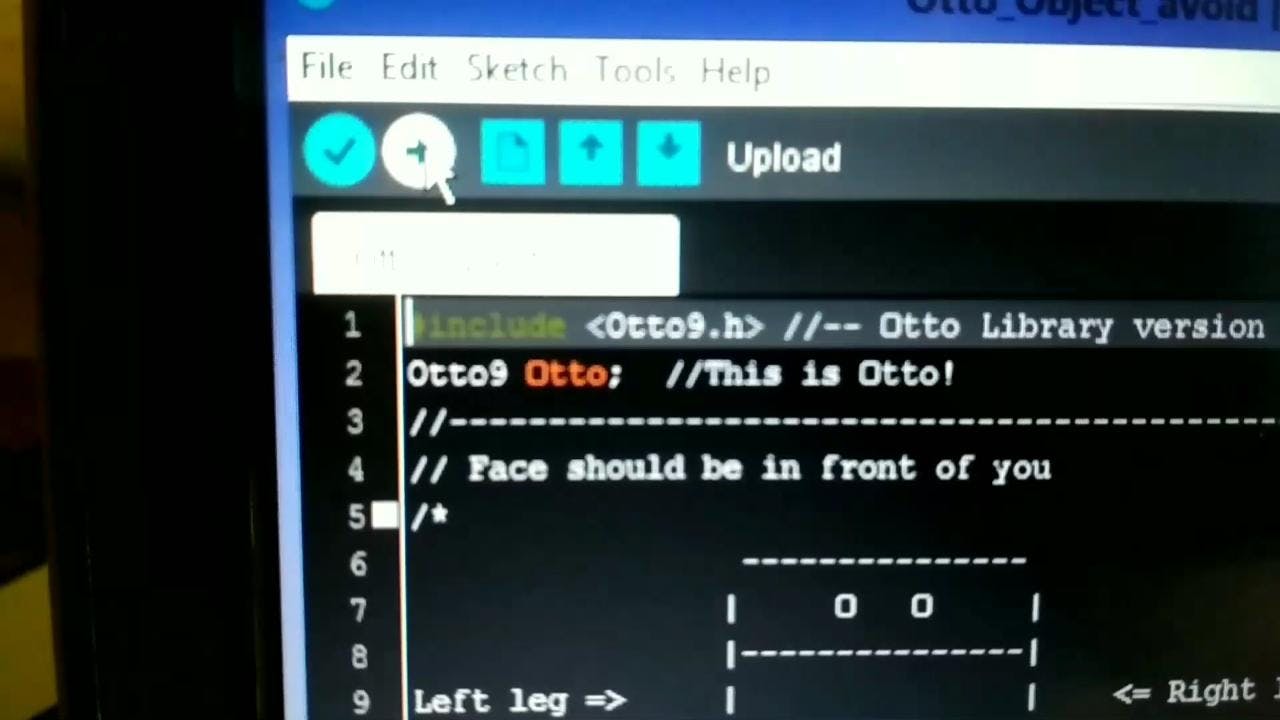
- 回到下載的文件夾。
- 在這里你可以上傳任何代碼,讓我們打開Otto_object_avoid代碼。
- 將機器人與 PC 連接,并確保板和端口正確。
- 將您的機器人倒置并上傳代碼。
- 你的機器人開始運行。
第 17 步:完成
?
?
?
?
?
1 / 2
?
嗚嗚嗚…………
現(xiàn)在將手放在機器人的前面,它會停止返回,轉動littlie bit并再次運行。
?
?
?
下載該資料的人也在下載
下載該資料的人還在閱讀
更多 >
- 手勢控制機器人開源項目
- Arduino機器人開源
- Arduino繪圖機器人開源分享
- WiFi控制機器人開源項目
- 兒童助理機器人開源項目
- 消毒機器人開源項目
- 平衡segway機器人開源項目
- Arduino Uno迷你機器人開源分享
- Arduino機器人開源分享
- Arduino機器人Ludos開源
- Arduino ESP32多合一機器人開源
- 5合1 Arduino機器人開源項目
- 機器人開源項目
- 自主機器人開源項目
- Arduino教學機器人的使用教程免費下載 37次下載
- 字節(jié)發(fā)布機器人領域首個開源視覺-語言操作大模型,激發(fā)開源VLMs更大潛能 360次閱讀
- 機器人技術中常用的路徑規(guī)劃算法的開源庫 843次閱讀
- 機器人項目涉及的技術 857次閱讀
- 利用STM32實現(xiàn)自平衡機器人功能項目 873次閱讀
- 如何使用Arduino制造一個自動平衡機器人 4429次閱讀
- 基于使用Arduino板及電機驅動器對機器人進行編程介紹 3660次閱讀
- 面對疫情 醫(yī)療機器人能幫上什么忙? 2126次閱讀
- dfrobotSparki機器人套裝簡介 2064次閱讀
- dfrobotDevastator履帶機器人移動平臺簡介 1515次閱讀
- 協(xié)作機器人的起源_為什么需要協(xié)作機器人 8127次閱讀
- 如何區(qū)分機器人、協(xié)作機器人和移動機器人? 6828次閱讀
- 軟體機器人 前所未見的機器人 3692次閱讀
- 機器人自動化工程項目方案設計包括的6個步驟解析 1.2w次閱讀
- 11個機器學習開源項目 2767次閱讀
- 基于Arduino的會打招呼的超萌機器人 3311次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數(shù)據(jù)手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發(fā)指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數(shù)字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論