 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
我們做了一個 ESP32 UWB 室內定位測試,使用 2 個 UWB 錨點和 1 個 UWB 標簽,當標簽移動時,UWB 標簽的實時位置可以圖形顯示在 PC 上。
補給品
● ESP32 超寬帶 *3
● 移動電源
● 5v電源*2
第 1 步:概述
1.1 介紹
DW1000 是世界上第一款基于超寬帶技術的單芯片無線收發器。它為實時定位和室內定位系統、基于位置的服務、無線傳感器網絡提供了一種新方法。它能夠開發具有成本效益的 RTLS 解決方案,其室內和室外定位精確到 10 厘米以內。
Makerfabs ESP32 UWB基于 ESP32 和 DW1000 解決方案,它就像一個連續掃描雷達,精確鎖定另一個設備并與之通信,從而計算自己的位置,配合 ESP32 WiFi/藍牙,它可能是無線解決方案室內定位。
1.2 關于超寬帶
超寬帶是一種在寬帶寬(>500 MHz)上傳輸信息的技術。這允許傳輸大量的信號能量,而不會干擾相同頻帶中的傳統窄帶和載波傳輸。許多國家/地區的監管限制允許有效使用無線電帶寬,并實現高數據速率個人區域網絡 (PAN) 無線連接、遠程低數據速率應用以及雷達和成像系統,與現有的透明共存通訊系統。

傳統無線電傳輸和 UWB 之間的顯著區別在于,傳統系統通過改變正弦波的功率水平、頻率和/或相位來傳輸信息。UWB 傳輸通過在特定時間間隔產生無線電能量并占用大帶寬來傳輸信息,從而實現脈沖位置或時間調制。通過編碼脈沖的極性、其幅度和/或通過使用正交脈沖,也可以在 UWB 信號(脈沖)上調制信息。UWB 脈沖可以以相對較低的脈沖速率偶爾發送以支持時間或位置調制,但也可以以高達 UWB 脈沖帶寬的倒數的速率發送。Pulse-UWB 系統已在超過 1 的通道脈沖速率下得到證明。
1.3 超寬帶測距
UWB 無線電系統可用于確定各種頻率下傳輸的“飛行時間”。當然,“飛行”的速度與光速一樣,所以核心問題是如何查看“飛行”的時間,從而計算出距離。
距離 = 光速 * Tprot
對于最基本的系統,至少有2項:Device_A(稱為A)和Device_B(稱為B), ?主要有2種測量方式:
- 單面雙向測距
- 雙面雙向測距
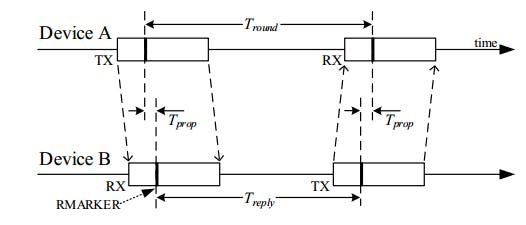
1.3.1 單面雙向測距
這是最基本的測量方法:
?

首先A發送消息(TX)并記錄時間標記,B收到消息,記錄時間標記,延遲(Treplay)后,B發送消息(TX)并記錄時間標記時間標記,最后A收到消息,并有時間標記的記錄。
然后是飛行時間:
由于 Tround 和 Treply 存儲在同一個設備上,所以時間誤差偏移;當然,A(eA) 和 B(eB) 之間存在誤差,誤差是:

也就是說,誤差與 Treply 是線性的。所以這種方式并不普及,只適用于很短距離的測量。
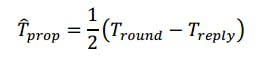
1.3.2 雙面雙向測距
“單面雙向測距”后,如果 A 再次反饋給 B,則為:
這種測量我們稱為?3 消息模式。
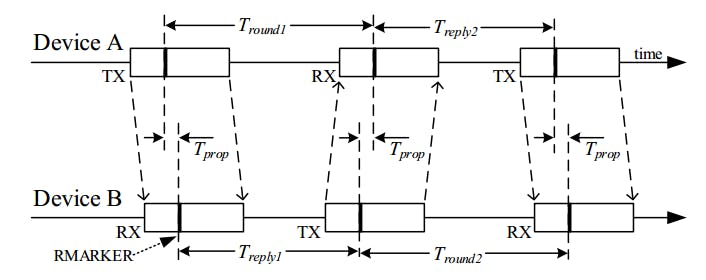
在“單邊雙向測距”之后,如果 B 再次發起另一條消息和 A 反饋,則為:
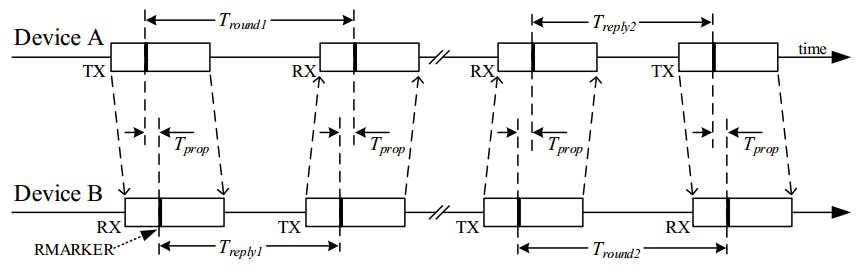
這種測量我們稱為?4 消息模式。
在 3 條消息模式或 4 條消息模式下,飛行時間計算如下:

?
第 2 步:使用 ESP32 UWB 進行室內定位
2.1 查看
在這個應用中,我們使用了 3 個 Makerfabs ESP32 UWB 模塊,2 個模塊作為 UWB 錨點,1 個作為 UWB 標簽,在房間內移動。當標簽獲得其位置時,它會將其位置傳輸到設備(PC 瀏覽器、手機應用程序),以顯示實時位置。
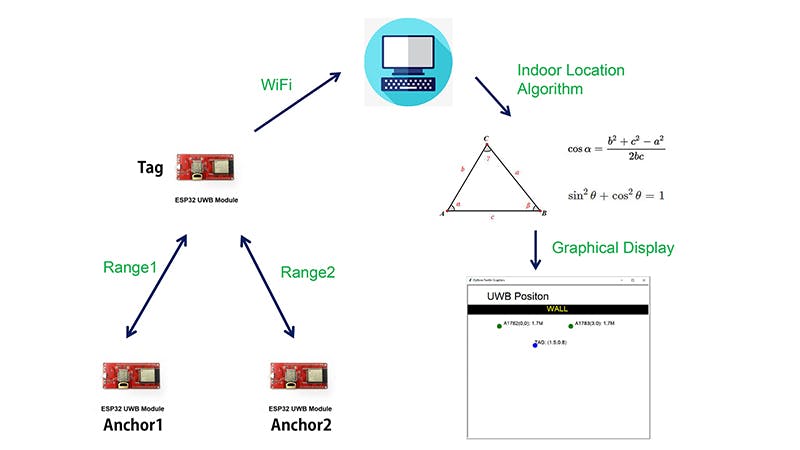
2.2 平面定向算法
假設所有三個 UWB 模塊都處于相同的水平高度。UWB可以得到Tag和兩個anchor的距離,再加上預先設置的兩個anchor的距離,就可以得到一個三角形三邊的長度。

兩個點“AB”分別是兩個錨點,“C”是標簽點。“c”是兩個anchor的距離,UWB會得到兩個長度“a”和“b”。標簽是“b”遠離點“A”和“a”遠離點“B”。
現在我們知道了三角形三邊之間的距離,我們可以計算點“C”的坐標。
我使用余弦定律計算角度“A”的余弦:
我有勾股定理,它給了我角度“A”的正弦:
cos_a = (b * b + c * c - a * a) / (2 * b * c) sin_a = sqrt(1 - cos_a * cos_a)
如果我們將點“A”設置為坐標系的原點 (0, 0),那么我們得到點 C (bcosα, bsinα)。
第 3 步:代碼解釋
3.1 圖書館
我們使用?arduino-dw1000庫。提供基本功能的庫,可將 Decawave 的 DW1000 芯片/模塊與 Arduino 一起使用(arduino-dw1000 庫)
請注意根據 Github 修改 DW1000 庫,否則無法編譯為 ESP32。ESP32 UWB GitHub 上的指南?
***此應用程序的完整代碼位于:? Makerfabs GitHub ***
3.2 Device_Anchor
由于系統中有 2 個錨點,我們需要為這兩個錨點設置不同的錨點地址。
#define ANCHOR_ADD "83:17:5B:D5:A9:9A:E2:9C"// modify the address when multiple anchors, such as 83/82.
該庫默認使用隨機短地址,我們需要將其設置為使用我們設置的靜態地址。所以我們需要將UWB模塊設置為Anchor模式,LONGDATA_RANGE_LOWPOWER模式,并關閉隨機短地址,通過以下代碼:
DW1000Ranging.startAsAnchor(ANCHOR_ADD,
DW1000.MODE_LONGDATA_RANGE_LOWPOWER, false);
Anchor 代碼位于:? https ://github.com/Makerfabs/Makerfabs-ESP32-UWB/tree/main/example/anchor
3.3 Device_Tag
標簽需要讀取兩個錨點之間的距離,通過UDP協議發送給PC。
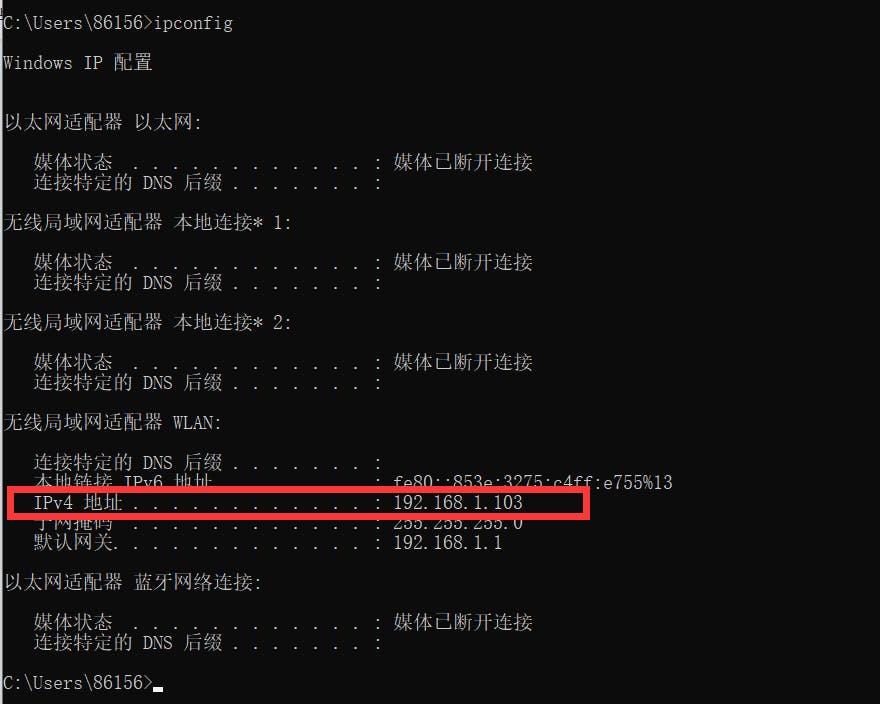
首先,設置 WiFi 和目標 IP 地址(PC)。
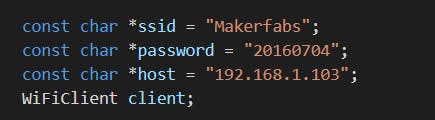
在 Windows cmd 中,使用“ipconfig”檢查 PC 本地 IP。
并設置UWB工作在標簽模式。

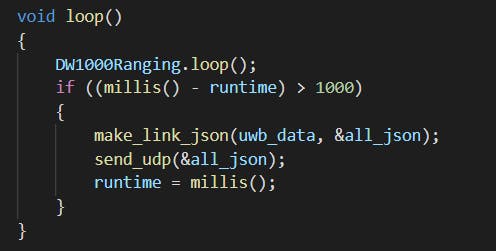
我使用了一個鏈表來存儲檢測到的錨點,它非常適合 UWB 的工作方式。鏈表的內容被轉換成 JSON 格式。
得到的JSON字符串格式如下:

最后通過UDP協議每秒向PC發送一次數據。
標簽代碼位于:? https ://github.com/Makerfabs/Makerfabs-ESP32-UWB/tree/main/example/IndoorPositioning/udp_uwb_tag
3.4 Python代碼
一個簡單的演示,用于計算標簽的位置并以圖形方式顯示它。使用海龜繪制。
一開始想用Matplotlib,但是有點復雜。Turtle 很簡單,但提供的功能很簡陋。我自己添加了一些繪圖功能來快速繪制線條、圓形、矩形等。
這是我的位置計算功能。
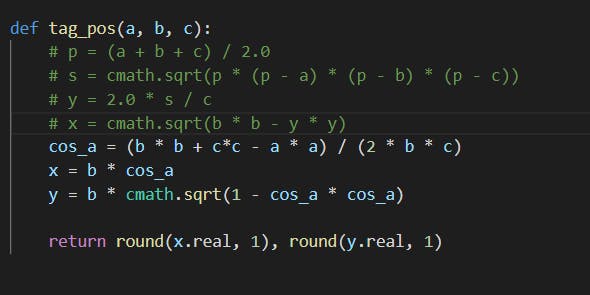
其實一開始我是用海倫公式計算坐標的,但是分不清三角形是銳角還是鈍角。
demo的功能是接收通過UDP協議傳輸的標簽的數據,計算出標簽的位置并繪制在屏幕上。
第四步:室內定位測試
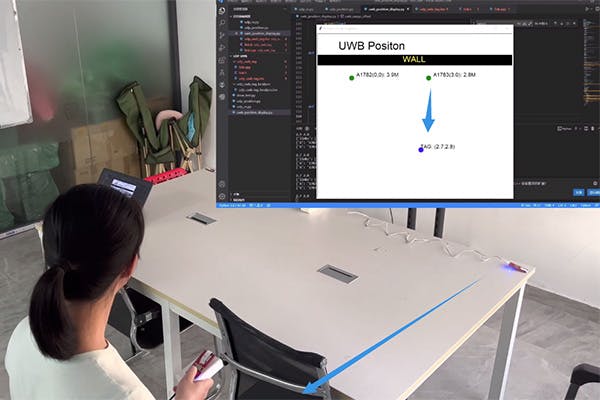
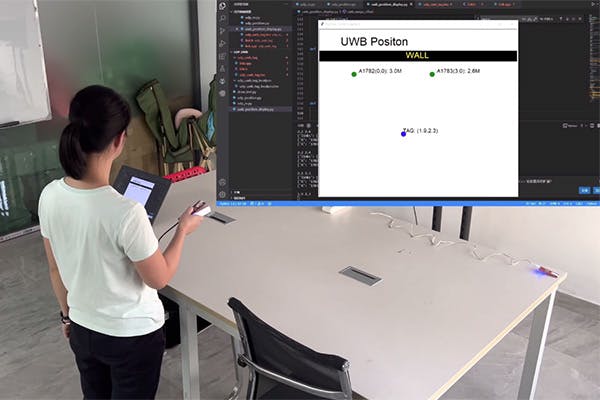
在所有 UWB 錨點和標簽都編程 OK 后,首先我將兩個 UWB 錨點放在桌子的兩側。

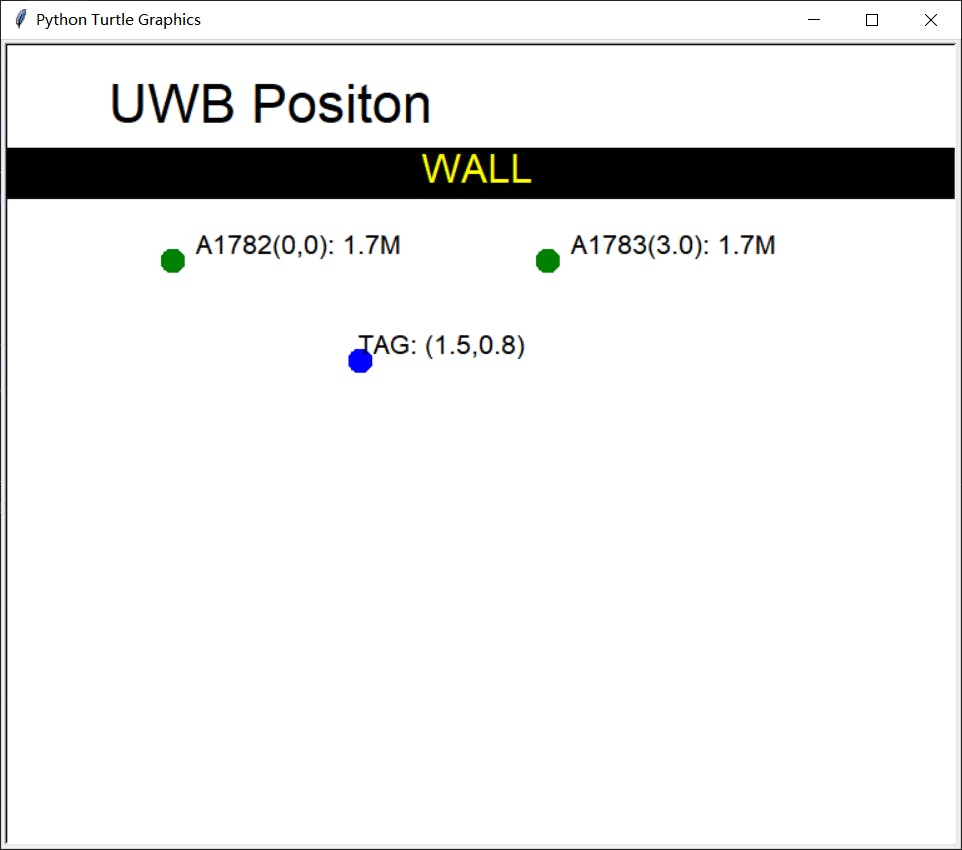
并在PC端運行Python程序。將 UWB 標簽貼到移動電源上,等待它連接到房間里的 WiFi。Tag連接PC后,彈出圖形界面。
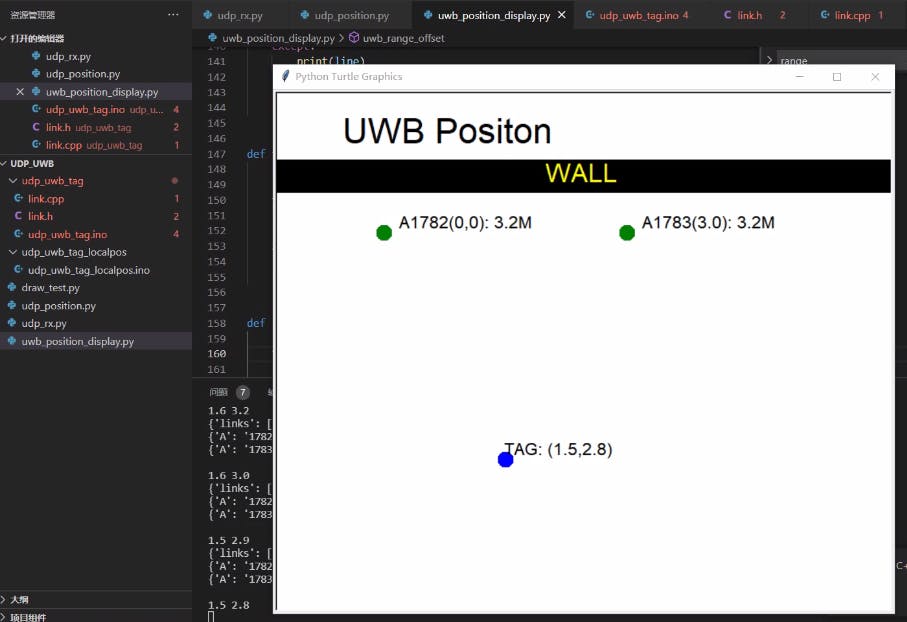
移動UWB標簽,在PC端可以實時監控標簽位置:
?
?
- ESP32開源項目
- 基于ESP32的開源項目
- ESP32開源項目分享
- ESP32低成本板開源項目
- ESP32/STM32電源系統開源項目
- ESP32物聯網小工具開源項目
- MINI型 UWB 室內定位開發模塊電路圖及PCB和源碼開源
- 基于UWB、里程計和RGB-D融合的室內定位方法 14次下載
- UWB與藍牙及RFID和WIFI的室內定位技術詳細比較 40次下載
- 室內定位技術的應用領域詳解 30次下載
- UWB超寬帶室內定位系統的介紹和應用框圖的詳細資料概述 42次下載
- UWB超寬帶室內定位和藍牙室內定位介紹pdf資料下載 52次下載
- 室內定位方案哪家強?藍牙網關顯神通 1次下載
- 基于STM32的室內定位系統設計 35次下載
- CC2431的室內定位系統設計
- 一文介紹:UWB定位基站種類及選擇 427次閱讀
- 目前的室內定位算法有什么優勢 546次閱讀
- 九種室內定位技術概覽 室內定位技術的原理和應用場景 1.7w次閱讀
- UWB室內定位系統的優勢與好處 1968次閱讀
- 對于UWB技術基礎詳解 8.7w次閱讀
- 藍牙室內定位技術的特點優勢及工作原理 1.2w次閱讀
- WiFi、藍牙、UWB常見的三種室內定位技術探討 3689次閱讀
- 藍牙網關在室內定位是如何運用的 2469次閱讀
- 探究基于RFID技術的室內定位方法 8237次閱讀
- UWB定位技術與其他定位技術比較 6273次閱讀
- 六種室內定位技術的優劣勢分析 2.7w次閱讀
- 室內定位技術有哪些_七大室內定位技術詳解 5.1w次閱讀
- 室內定位解決方案廠商有哪些_十大室內定位解決方案廠商匯總 2w次閱讀
- 深度解析室內定位和室外定位技術 6.1w次閱讀
- 介紹UWB技術的由來、優點、應用場景以及應用價值、發展中的問題 1.5w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數據手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網監
工商網監
評論