 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
大象邊緣挑戰為將保護技術的想法應用于該領域提供了令人興奮的機會。在這個特殊的挑戰中,技術可以在減輕人與動物的沖突和深入了解大象的短期和長期行為方面發揮雙重作用。
在這個項目中提出和展示的想法是一個結合了智能項圈和智能網關的框架。
印度的人象沖突
在印度,2015 年至 2018 年間,人象沖突導致1713 人死亡和 373 頭大象死亡。在某些情況下,技術可以幫助減少死亡人數。例如, 2016 年至 2018 年期間,有 49 頭大象因火車事故而死亡。越來越多的游客使用的咖啡和茶園道路正成為越來越多的沖突場景。大象對農作物的襲擊破壞了農民的生計,對人類和大象來說變得越來越危險。一些研究還表明,人象沖突的熱點圍繞保護區、種植園和河流走廊的邊緣。
技術解決方案的要求
針對不同類型的人象沖突的技術框架解決方案的共同要求包括:
- 在確定的熱點部署準確可靠的預警系統。
- 智能衣領傳感器數據與邊緣機器學習相結合,提供實時警報,可以是基于基本傳感器和更復雜的基于機器學習的警報檢測,例如人員存在、槍聲、鞭炮等。
- 用于洞察復雜大象行為的傳感器和機器學習數據。
- 與項圈通信并通過云將數據發送到公園/森林官員的儀表板的網關。
- 在人象沖突期間,網關向當地受影響的人們發出本地警報。
通用框架解決方案
該項目提出了一個框架來滿足這些要求。以下是框架解決方案的細分:
O網關塔具有基于地理周長的分級和可配置的早期預警系統。例如,塔可以配置警告和警報邊界。這些可用于在大象項圈進入/離開這些周邊時發送適當的通知。
O通知分為兩部分:
- 可以適應區域環境的本地通知。例如,農場中的藍牙mesh/SMS警報、林道和火車軌道上的數字顯示器、向火車司機發送的藍牙mesh跳消息等。
- 云通知到儀表板以及公園/森林官員遠程監控的推送警報等。
O以下常見數據類型:
- 實時衣領數據
- 網關塔配置數據
- 儀表板數據的網關
- 活動歷史數據
- 機器學習 (ML) 歷史數據
O使用實時衣領數據,我們可以:
- 發送項圈識別信息
- 發送傳感器數據
- 發送實時 ML 檢測到的事件
O使用網關塔式配置,我們可以:
- 在人與動物沖突的任何關鍵區域周圍設置地理范圍
O使用儀表板數據網關,我們可以:
- 通過網關監控、傳感器和機器學習組合來自網關、項圈和事件的數據,并將它們發送到云儀表板。
O有了活動歷史,我們可以:
- 當項圈不在任何網關塔的范圍內時,存儲通過傳感器檢測到的大象活動以進行廣播。
O借助機器學習歷史,我們可以:
- 存儲事件、行為和環境預測。這些可以為大象更復雜的行為提供短期和長期的見解。
O通過添加一些傳感器讀取代碼,可以將來自項圈的真實傳感器數據通過給定的代碼推送到網關。
O類似地,不同的區域背景或沖突地區特定的機器學習解決方案可以“即插即用”到這個框架中。
O還可以想象,為這一挑戰編寫的軟件可以指導在該領域開發和部署一個強大的版本(使用更本地的語言,如 C)。
上述提出的框架可應用于:
- 大象頻繁襲擊農作物的農田
- 事故發生率較高的鐵路軌道路段
- 看到人象沖突的保護區邊界
- 盜獵風險高的森林區域
- 對人類危害很大的種植園道路
- 大象一般監測的森林觀察點
- 與人類發生沖突的其他瀕危物種的類似設置。
代碼
該代碼已使用以下功能編寫:
- 從 JSON 文件中讀取網關塔配置信息。
- 監控 JSON 文件中定義的塔的地理周長。
- 當大象項圈在范圍內并突破定義的邊界時生成事件消息。這是通過檢查大象項圈位置與周邊四個側面的交叉軌道距離來完成的。到目前為止,這適用于矩形周長,但不適用于任何四邊形多邊形。
- 本地和儀表板通知的不同事件消息生成。
- 將數據(包含塔、項圈和事件信息)從設備發送到 IoT Connect 儀表板
添加了以下函數來模擬傳感器和 LoRa 和藍牙設備之間的通信
- 通過定義范圍半徑來模擬進入 LoRa 網關范圍內的大象項圈,并通過計算Haversine distance來檢查大象是否在該范圍內。
- 通過連接到 MQTT 代理并訂閱(監聽)動物項圈主題,模擬網關通過 LoRa 或藍牙監聽大象項圈
- 通過從準備好的 JSON 文件中讀取人工項圈信息并定期發布信息,模擬一頭大象在不同區域移動并廣播信息。
數據
實時衣領數據示例:
{
"collar_id": "Elephant214KLIN",
"animal_species": "Elephant",
"animal_name": "yaanai",
"animal_position": {
"latitude": 8.969345,
"longitude": 77.130787
},
"orientation": "North",
"activity": {
"current_state": "WALKING",
"mag_orientation": "UPRIGHT",
"duration": 13.5,
"acceleration": {
"x-axis": 0.5,
"y-axis": 0.21,
"z-axis": 0.03
}
},
"sensor_events": [
{
"level": "WARNING",
"event": "Low battery",
"value": 9
}
],
"tiny_ml_detected_events": [
{
"level": "DANGER",
"event": "Firecracker sounds detected",
"confidence": 87.5
},
{
"level": "ALERT",
"event": "Human voices detected",
"confidence": 91.2
}
],
"collar_charge": 75,
"last_gateway_sync": "2020-10-25 15:27:13"
}
在這個數據結構中,我們已經包含了字段:“animal_position”和緯度和經度。出于此模擬的目的,將其包括在內。實際部署時的領口位置將由連接LoRa Cloud的網關塔計算。
儀表板云數據的示例網關:
{
"dataArray": [
{
"data": {
"tower_id": "FarmlandGateway1",
"tower_area": "Theni",
"tower_position": {
"latitude": 8.955328,
"longitude": 77.13456
},
"tower_type": "FARM_LAND_TOWER",
"tower_zone": "CONFLICT",
"event_message": {
"level": "WARNING",
"text": "Yaanai inside FarmlandGateway1 warning perimeter"
}
},
"uniqueId": "FarmlandGateway1",
"time": "2020-10-27 19:12:34"
},
{
"data": {
"collar_id": "Elephant214KLIN",
"animal_species": "Elephant",
"animal_name": "yaanai",
"animal_position": {
"latitude": 8.969345,
"longitude": 77.130787
},
"orientation": "North",
"activity": {
"current_state": "WALKING",
"mag_orientation": "UPRIGHT",
"duration": 13.5,
"acceleration": {
"x-axis": 0.5,
"y-axis": 0.21,
"z-axis": 0.03
}
},
"collar_charge": 75,
"last_gateway_sync": "2020-10-25 15:27:13"
},
"uniqueId": "collarInfo",
"time": "2020-10-27 19:12:34"
}
]
}
樣本活動歷史數據:
{
"collar_id": "Elephant214KLIN",
"animal_species": "Elephant",
"animal_name": "yaanai",
"activity_log": [
{
"timestamp": "2020-10-25 15:21:45",
"state" : "RESTING",
"duration" : 27.5,
"orientation" : "UPRIGHT",
"acceleration": {
"x-axis": 0.01,
"y-axis": 0.03,
"z-axis": 0.00
},
"mag_orientation": "North"
},
{
"timestamp": "2020-10-25 15:21:45",
"state" : "RESTING",
"duration" : 27.5,
"orientation" : "UPRIGHT",
"acceleration": {
"x-axis": 0.01,
"y-axis": 0.03,
"z-axis": 0.00
},
"mag_orientation": "North"
},
{
"timestamp": "2020-10-25 15:21:45",
"state" : "RESTING",
"duration" : 27.5,
"orientation" : "UPRIGHT",
"acceleration": {
"x-axis": 0.01,
"y-axis": 0.03,
"z-axis": 0.00
},
"mag_orientation": "North"
}
}
領子數據的機器學習歷史示例:
{
"collar_id": "Elephant214KLIN",
"animal_species": "Elephant",
"animal_name": "yaanai",
"ml_prediction_log": [
{
"timestamp": "2020-10-25 15:21:45",
"event_prediction": {
"event": "WITH_HERD",
"level": "INFO",
"confidence": 94.7
},
"beaviour_prediction": {
"behaviour": "Agitated",
"confidence": 56.2
},
"environment_prediction": {
"environment": "RIVER_BANK",
"confidence": 65.3
}
},
{
"timestamp": "2020-10-25 15:45:06",
"event_prediction": {
"event": "WITH_HERD",
"level": "INFO",
"confidence": 95.1
},
"beaviour_prediction": {
"behaviour": "Normal",
"confidence": 86.2
},
"environment_prediction": {
"environment": "RIVER_BANK",
"confidence": 43.4
}
},
{
"timestamp": "2020-10-25 16:23:21",
"event_prediction": {
"event": "WITH_HERD",
"level": "INFO",
"confidence": 97.8
},
"beaviour_prediction": {
"behaviour": "Normal",
"confidence": 86.2
},
"environment_prediction": {
"environment": "THICK_FOREST",
"confidence": 43.4
}
}
]
}
模擬
使用該項目中包含的代碼和示例數據,我們可以模擬:
- 一頭或多頭大象移動并廣播實時項圈信息。
- 一個或多個網關塔監聽領廣播。
- 基于周界、傳感器和 ML 的事件。
該項目包括兩個可重復的模擬。
場景一:大象離開保護區穿越鐵軌
對于本次演示,我們選擇了位于印度喀拉拉邦 Edapalayam 的地點。這里有一條穿過森林區域的鐵路軌道。增加了兩座塔來監控這個潛在的沖突區。
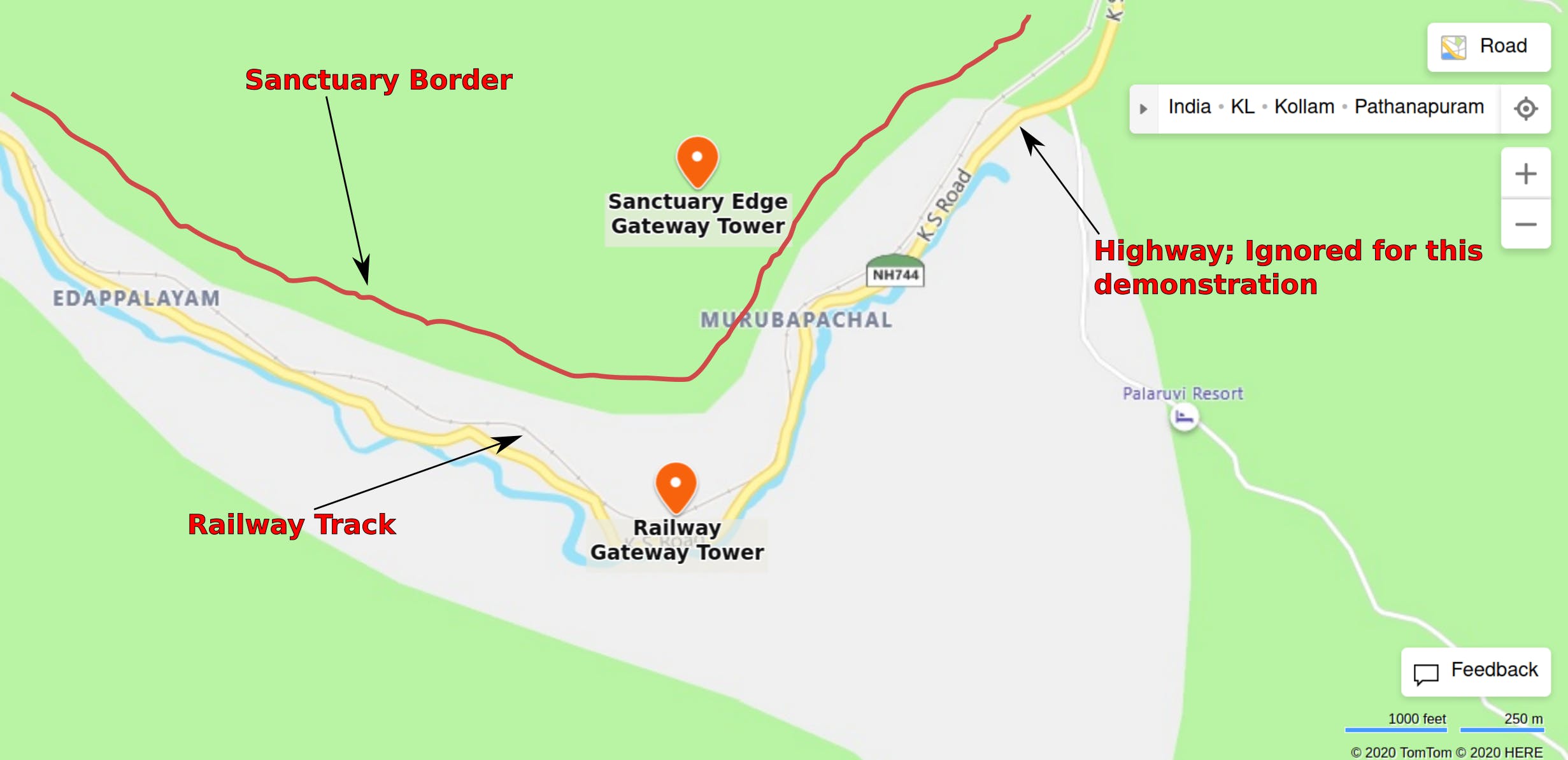
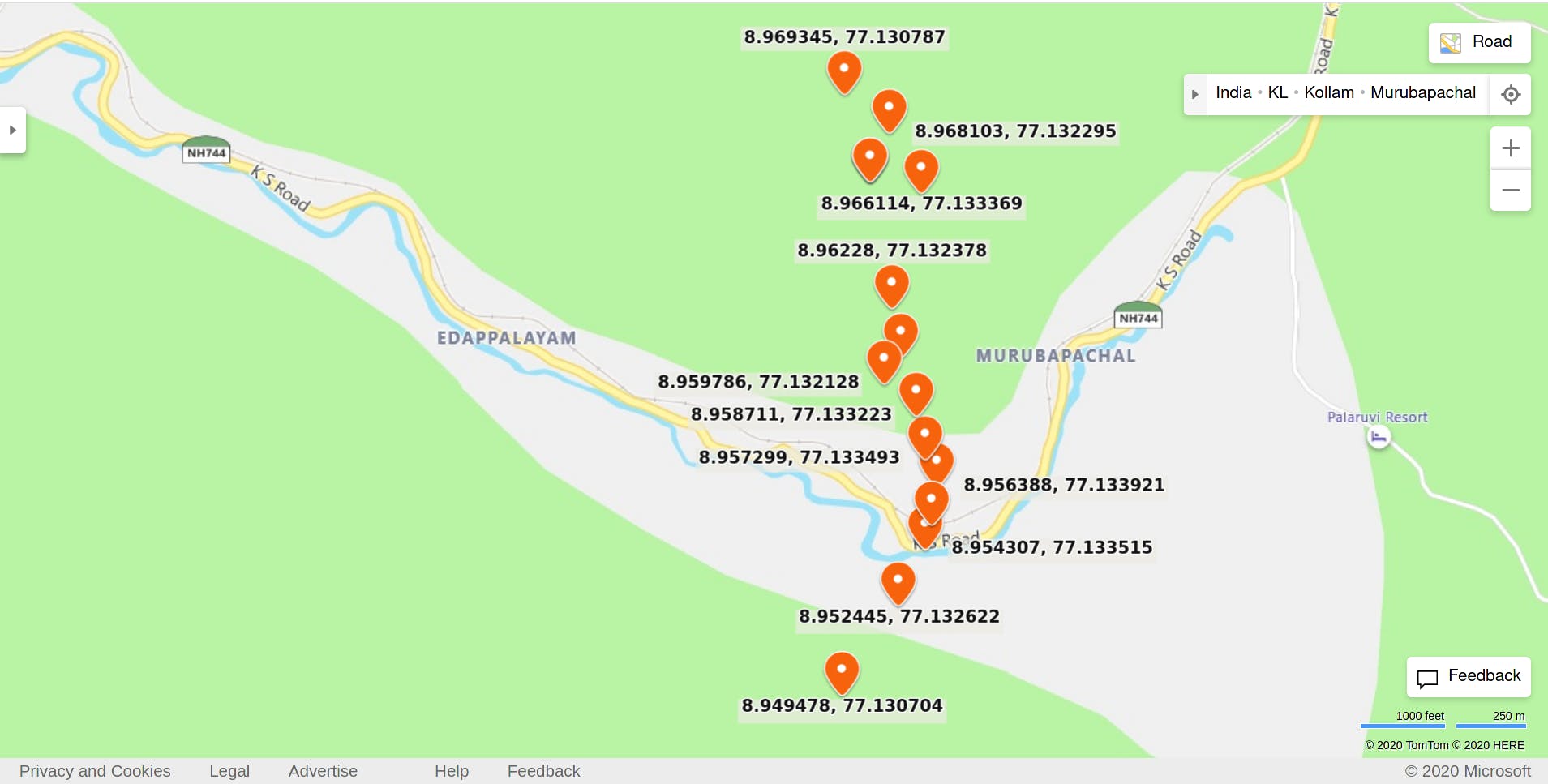
一頭大象離開保護區,穿過鐵軌,前往對面森林的模擬路徑:
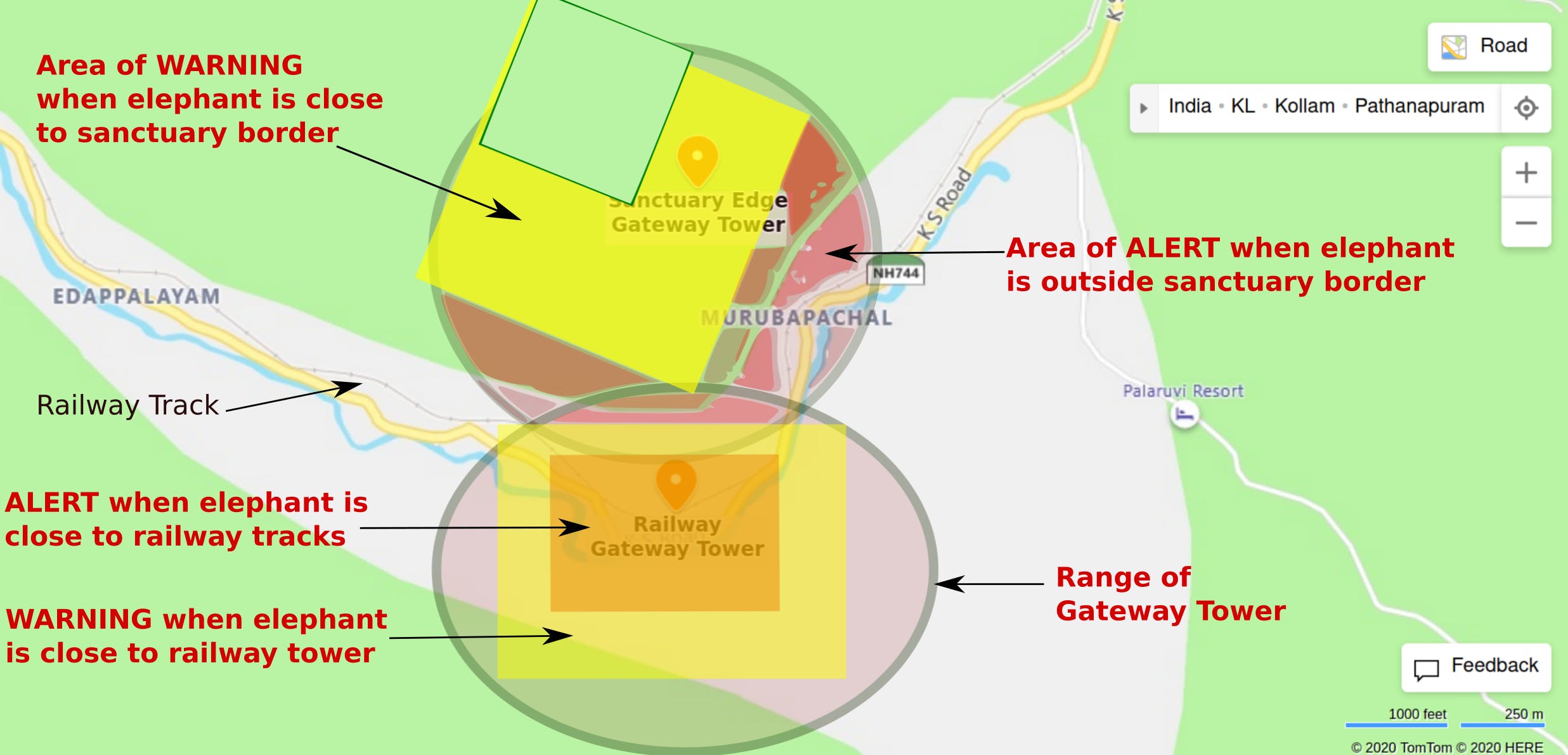
這些塔已經配置了警告和警報周邊。但是,它們的行為不同。
- Sanctuary 邊緣塔在大象項圈離開警告/警報范圍時發出通知。
- 當大象項圈在警告/警報范圍內時,鐵路塔會發出通知。
兩個塔的警告和警報區域的表示。
要重現此模擬,您需要以下內容:
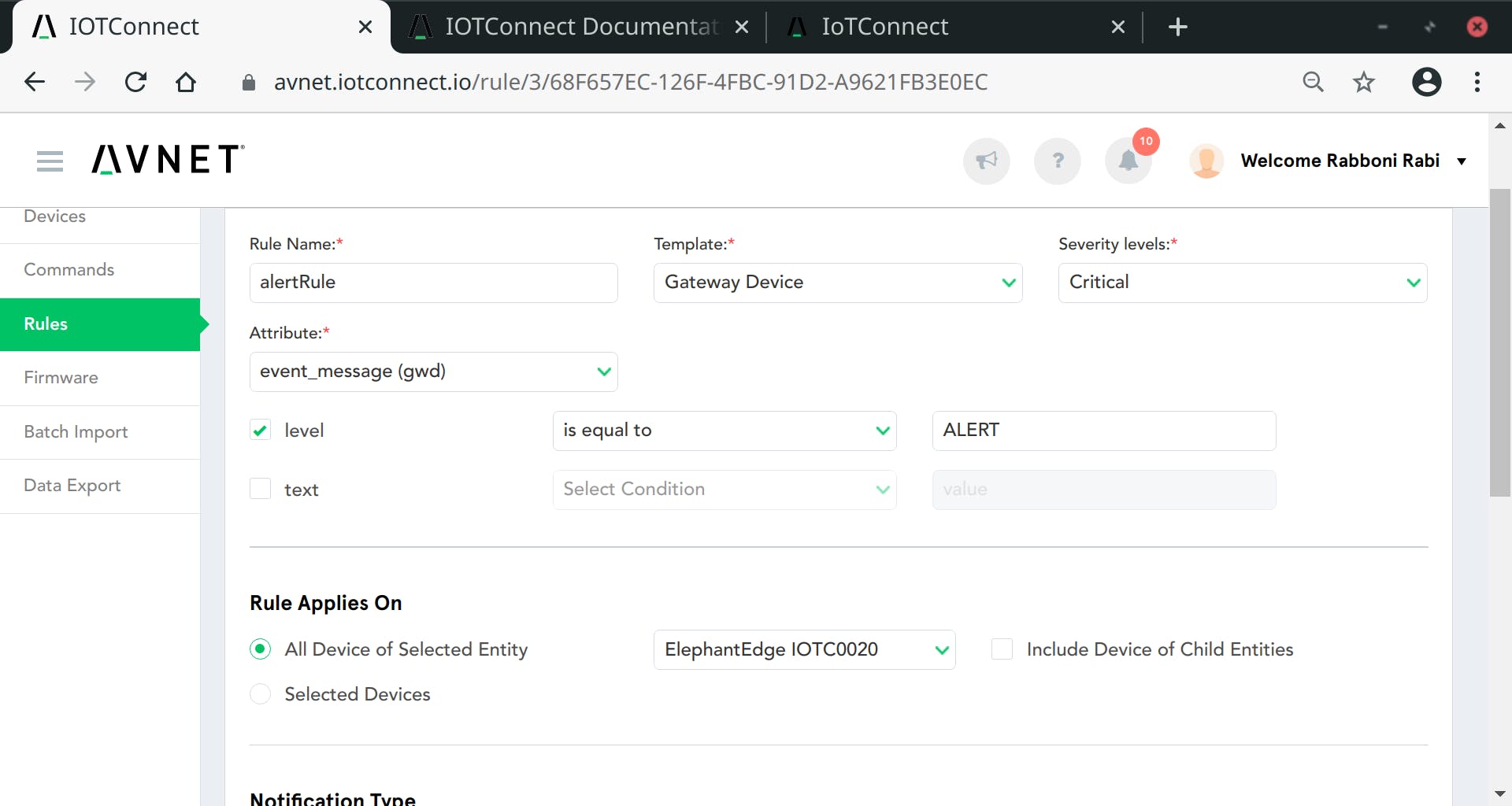
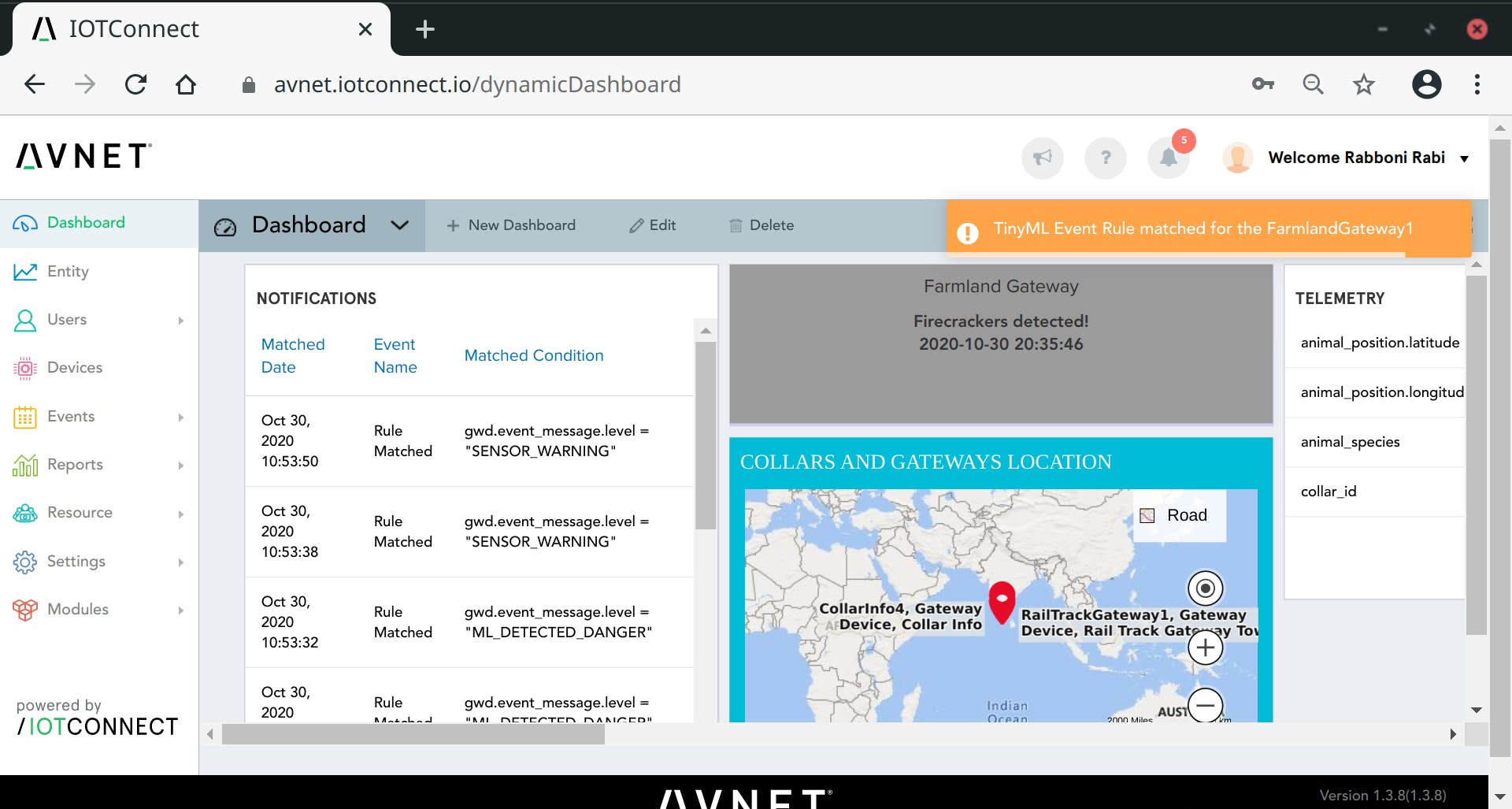
第 1 步:Avnet IoT Connect 儀表板設置。
在Avnet IoT Connect上設置一個帳戶。在 Avnet IoT Dashboard 上設置網關設備。該文檔將指導您創建模板、網關設備、設置儀表板等。儀表板上配置的網關設備 ID 應與推送到云的數據中的唯一 ID 匹配。還有關于為發送到 IoT Connect 的數據中的事件設置規則匹配的文檔。
模板設備的規則可以通過以下方式配置:
?
為此模擬設置的儀表板:

第 2 步:一臺計算機和(或)一個 RaspberryPi。
模擬大象路徑已編號為 1 至 8。已添加農田門戶塔。
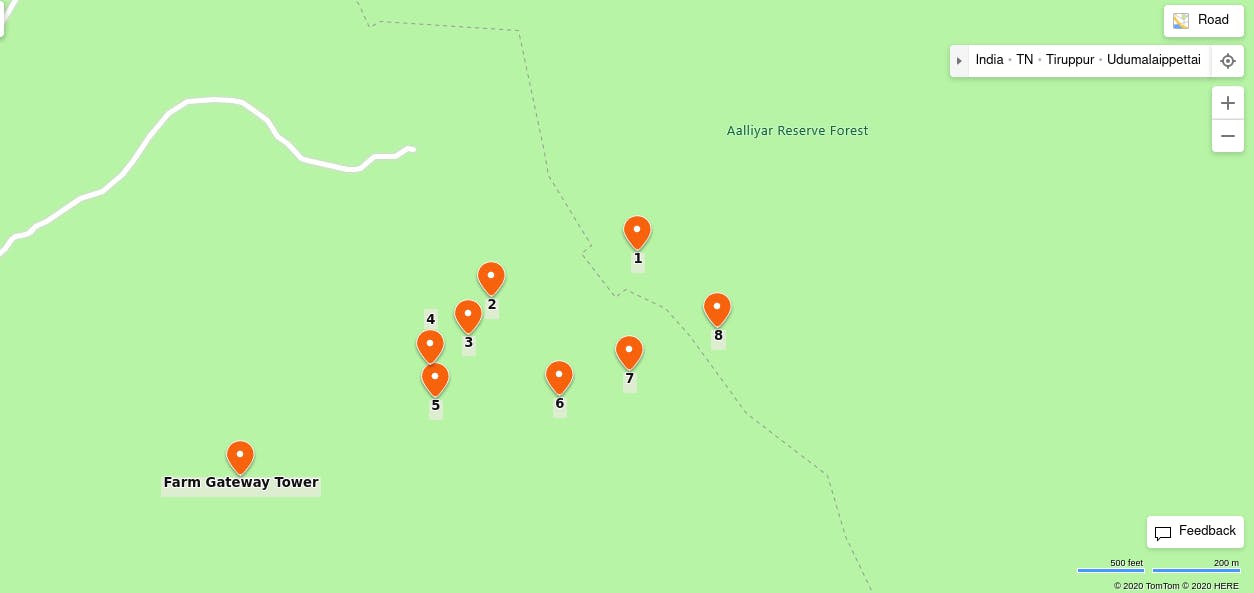
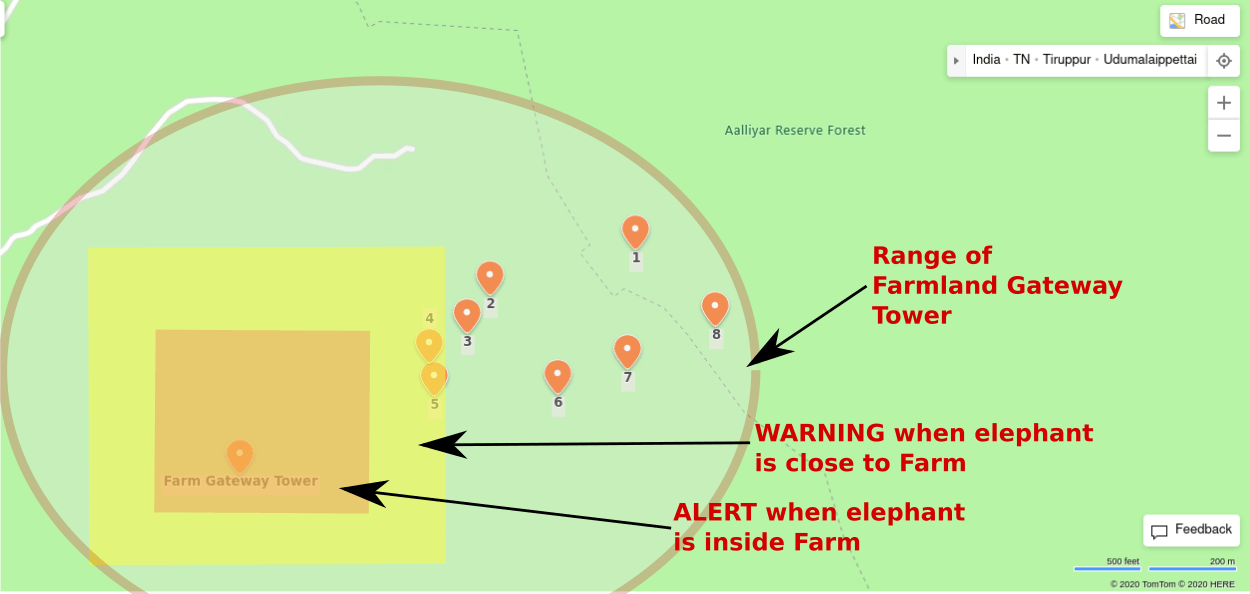
塔的配置周長和范圍如下所示:
?
為了重現這個模擬,前一個模擬的步驟 1 到 4 是相同的。
第 5 步:LoRa 范圍
對于此模擬,塔的 LoRa 范圍為 1200 米。lora_range在 中的變量中檢查此值edge_gateway_tower.py。
第 6 步:運行模擬
從命令行,可以使用以下命令啟動塔:
python edge_gateway_tower.py farm_land_tower.json
對于您想要的機器的衣領模擬,執行:
python roaming_elephant_simulation.py farm_with_sensor_ml_events_collar_path.json
模擬現在應該正在運行。在執行塔代碼的控制臺中,您應該會看到本地邊界警報。在 Avnet IoT Connect 儀表板中,您應該會看到有關邊界、傳感器和 ML 檢測到的通知的儀表板消息。您可以為模板設備配置規則以在事件匹配規則時顯示 UI 警報。
。
參考資源:
- 人象沖突及其緩解
- 如何從殺手鐵軌上拯救印度大象
- 繪制人象沖突熱點地圖
- 土地利用馬賽克中人象沖突的決定因素
- 評估以農場為基礎的減輕人象沖突的措施
- 人象沖突:當前管理策略回顧
- 使用衛星遙測緩解人象沖突
- 減輕人類大象沖突的瓦爾帕萊模型
- 熱帶環境中樹葉對 LoRa 433MHz 傳播的影響
- 森林、城市和郊區環境中 LoRa 信號傳播的研究
?
- 開疆智能CAN轉EtherNET網關用戶手冊
- 開疆智能Modbus轉EtherNET IP網關產品手冊
- AIoT智能邊緣計算網關ECOM架構及參考設計技術規范 3次下載
- 工業智能網關如何快對接微軟云Azure IOT 0次下載
- 碩士學位論文《家庭智能網關的研究與實現》 24次下載
- 5G工業智能網關WG783系列產品規格書 16次下載
- 基于AMI的智能電網通信網關裝置研究 17次下載
- 基于SPESC到目標程序語言的智能合約系統框架 15次下載
- 如何在OPENWRT開源路由器上搭建智能家庭網關系統的設計論文 15次下載
- 基于CPS的智能控制生產線框架網絡化設計 13次下載
- 智能電網關鍵技術研究展望 15次下載
- 智能家居和能源網關參考設計原理圖 31次下載
- 基于智能客戶端的PLM系統體系框架
- MC68VZ328 的智能家庭網關的解決方案
- 基于AOP的智能Web緩存框架
- 網關智能電表是什么?什么是網關智能電表? 177次閱讀
- PLC智能網關的功能解析 330次閱讀
- PLC工業智能網關與DTU的區別 428次閱讀
- 智能網關和交換機在智慧路燈桿上的用途差別 286次閱讀
- 工業智能網關怎么與設備連接 工業智能網關需要具備的能力 1273次閱讀
- 工業智能網關的作用 工業智能網關的結構組成 568次閱讀
- 基于DLTAP713SC的智能寵物項圈:433遙控與RGB燈光的融合 1188次閱讀
- 工業智能網關實現的功能是 402次閱讀
- 12個好用的人工智能工具和框架 8738次閱讀
- 5G智能網關的優勢及原理 5699次閱讀
- 物聯網智能網關的應用場景 3316次閱讀
- 基于Ruff 5110智能網關在地質災害及農業領域的監測系統設計 1338次閱讀
- 基于網關和BLE的智能燃氣表系統的設計及原理 2100次閱讀
- 強化物聯網“心臟”,智能網關設計詳解 6031次閱讀
- Designs of Week:智慧智能網關,聰明設計 3454次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數據手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網監
工商網監
評論