 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
- TI-RSLK MAX 基本套件:標準套件中的漫游者和保險杠傳感器。( www.ti.com/rslk )
- 紅外傳感器: Pololu 的 OPT3101 ( https://www.pololu.com/product/3680 )
- GripperServoCity 標準夾具套件 A ( https://www.servocity.com/standard-gripper-kit-a )
RSLK MAX 套件
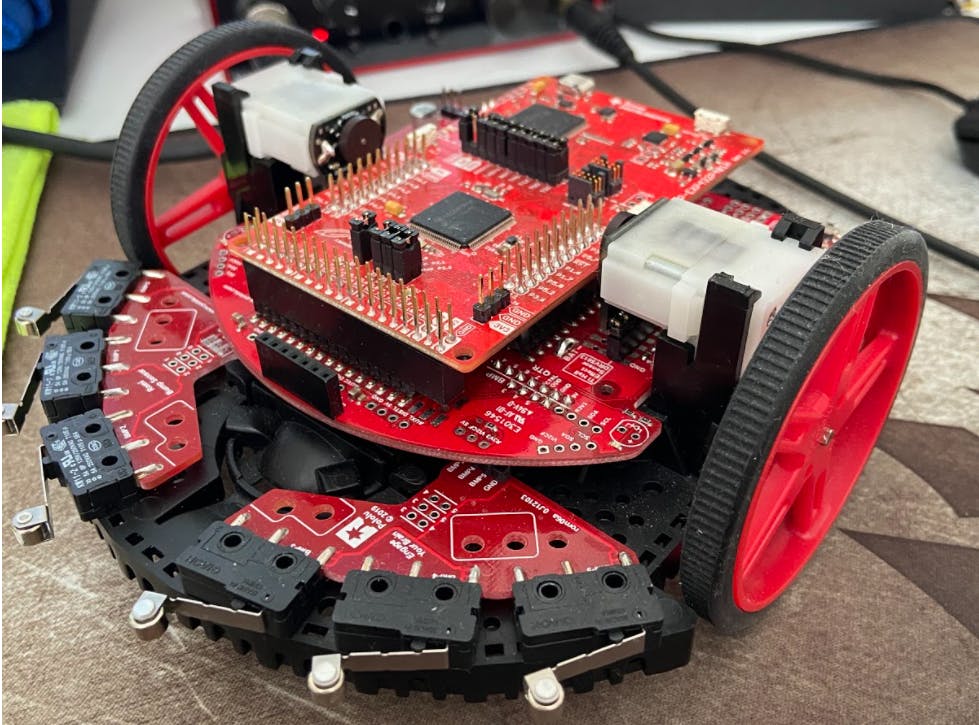
完全組裝后的基本套件將如上圖所示,其中包括以下內容:
該套件由 6 節 AA 電池供電,該電池不包含在套件中。
該套件本身功能齊全,因此請隨時開始對隨附的電機和碰撞傳感器進行編程。您可以在此處找到入門指南:https ://university.ti.com/en/faculty/ti-robotics-system-learning-kit/ti-rslk-max-edition-curriculum
漫游者
TI RSLK 機器人由兩個無刷直流電機驅動,每側一個電機。機器人由其后部的單個全向球輪平衡。這種設計允許差速轉向和精確轉向。
在流動站上,每個電機都連接到旋轉編碼器和 DRV8838 H 橋電機驅動器。旋轉編碼器允許測量有關電機位置、速度和加速度的信息。H 橋允許有刷電機改變方向。通過使用 PWM 信號快速啟用和禁用電機,可以控制每個電機的速度。PWM 信號通過在電機上產生平均電壓來控制輪速。
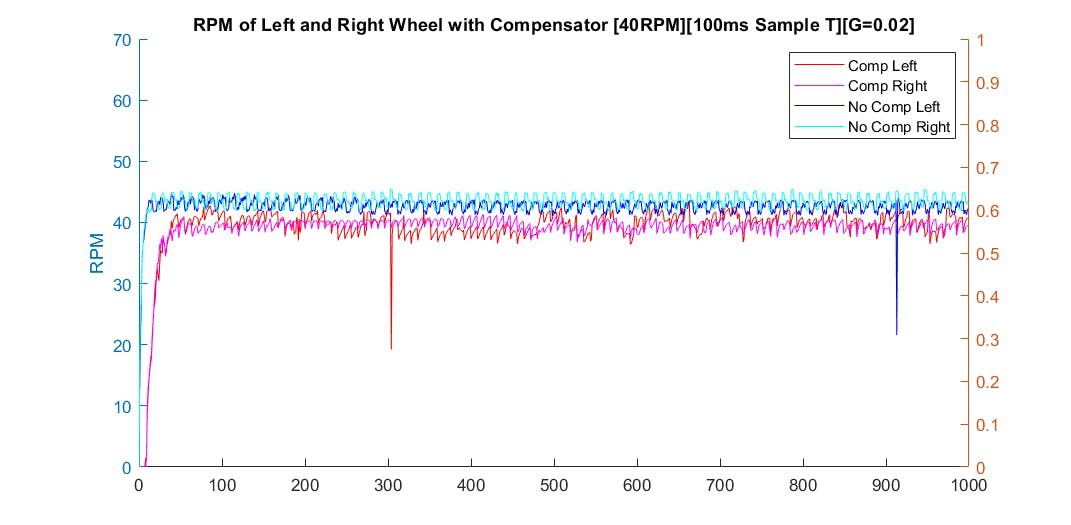
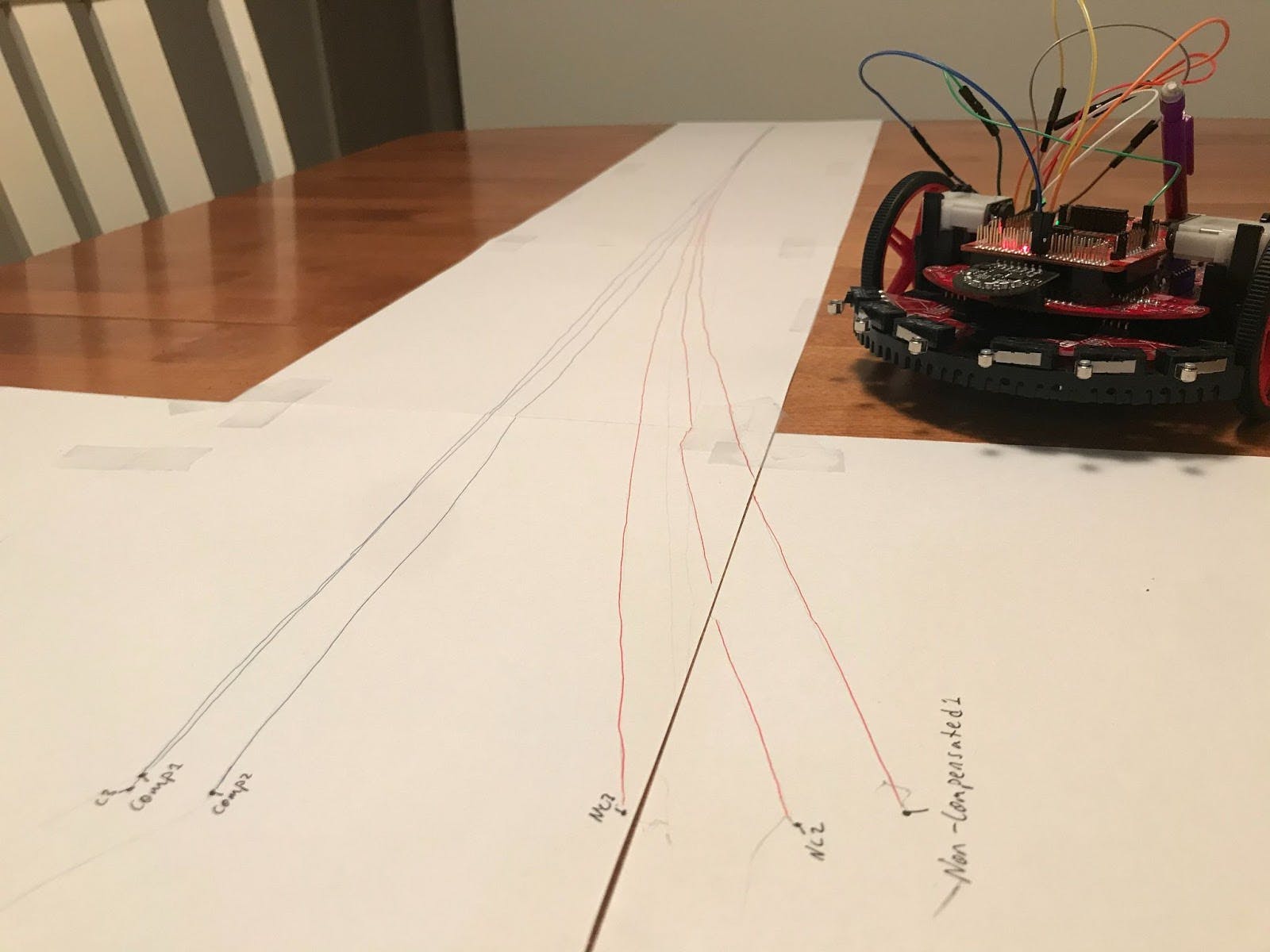
流動站還包含一個基本控制系統,使用編碼器輸出根據給定的 RPM 調整每個電機的速度。由于左右電機通常不完全相同,因此一個電機的運行速度通常比另一個電機稍高,控制系統旨在糾正這種情況。控制系統以一階補償器的形式實現。您可以在下圖中看到補償器的好處。
示例代碼中提供了一個 PWM 庫來提供基礎。該 PWM 庫允許用戶簡單地輸入所需的頻率、占空比和輸出引腳。這個庫是作為一個多用途庫構建的,并且在抓手和流動站實施中都使用了。流動站移動的主要行為是向前、向后和向左或向右旋轉。在每個行為中,都有單獨的函數用于移動指定的時間和距離,或指定的度數用于旋轉函數。該庫還為您提供了實施控制系統的選項。
以下是一些函數示例:
// moveForwardForTimeComp
// robot moves forward for a specified amount of time
// inputs: _rpm indicates robot speed
// milliSecs indicates amount of time
// outputs: none
void moveForwardForTimeComp(uint32_t _rpm, uint32_t milliSecs)
{
enableCompensator();
//nominal _rpm unit is deci rpm
move_timer.target_count = milliSecs;
move_timer.count = 0;
move_end_cond = TIME;
right_wheel_data.des_rpm = _rpm;
left_wheel_data.des_rpm = _rpm;
setWheelDirForward(&right_wheel_data);
setWheelDirForward(&left_wheel_data);
rover_state = MOVING_FORWARD;
}
// moveBackwardForTimeComp
// robot moves backward for a specified amount of time
// inputs: _rpm indicates robot speed
// milliSecs indicates amount of time
// outputs: none
void moveBackwardForTimeComp(uint32_t _rpm, uint32_t milliSecs)
{
enableCompensator();
//nominal _rpm unit is deci rpm
move_timer.target_count = milliSecs;
move_timer.count = 0;
move_end_cond = TIME;
right_wheel_data.des_rpm = _rpm;
left_wheel_data.des_rpm = _rpm;
setWheelDirBackward(&right_wheel_data);
setWheelDirBackward(&left_wheel_data);
rover_state = MOVING_BACKWARD;
}
// rotateRightForTimeComp
// robot rotates to the right for a specified amount of time
// inputs: _rpm indicates robot speed
// milliSecs indicates amount of time
// outputs: none
void rotateRightForTimeComp(uint32_t _rpm, uint32_t milliSecs)
{
enableCompensator();
move_timer.target_count = milliSecs;
move_timer.count = 0;
move_end_cond = TIME;
right_wheel_data.des_rpm = _rpm;
left_wheel_data.des_rpm = _rpm;
setWheelDirForward(&left_wheel_data);
setWheelDirBackward(&right_wheel_data);
rover_state = ROTATING_RIGHT;
}
// rotateLeftForTimeComp
// robot rotates to the left for a specified amount of time
// inputs: _rpm indicates robot speed
// milliSecs indicates amount of time
// outputs: none
void rotateLeftForTimeComp(uint32_t _rpm, uint32_t milliSecs)
{
enableCompensator();
move_timer.target_count = milliSecs;
move_timer.count = 0;
move_end_cond = TIME;
right_wheel_data.des_rpm = _rpm;
left_wheel_data.des_rpm = _rpm;
setWheelDirForward(&right_wheel_data);
setWheelDirBackward(&left_wheel_data);
rover_state = ROTATING_LEFT;
}
碰撞傳感器
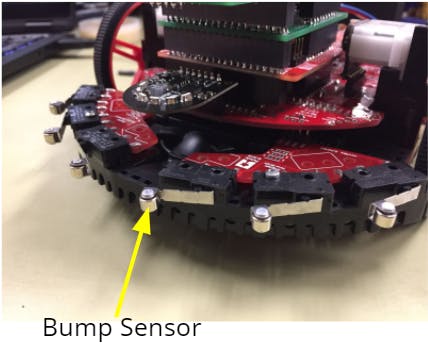
RSLK-MAX 基礎套件中的碰撞傳感器與 IR 傳感器一起使用,可檢測由于障礙物高度較低或光照條件差而導致 IR 傳感器無法檢測到的障礙物。
。
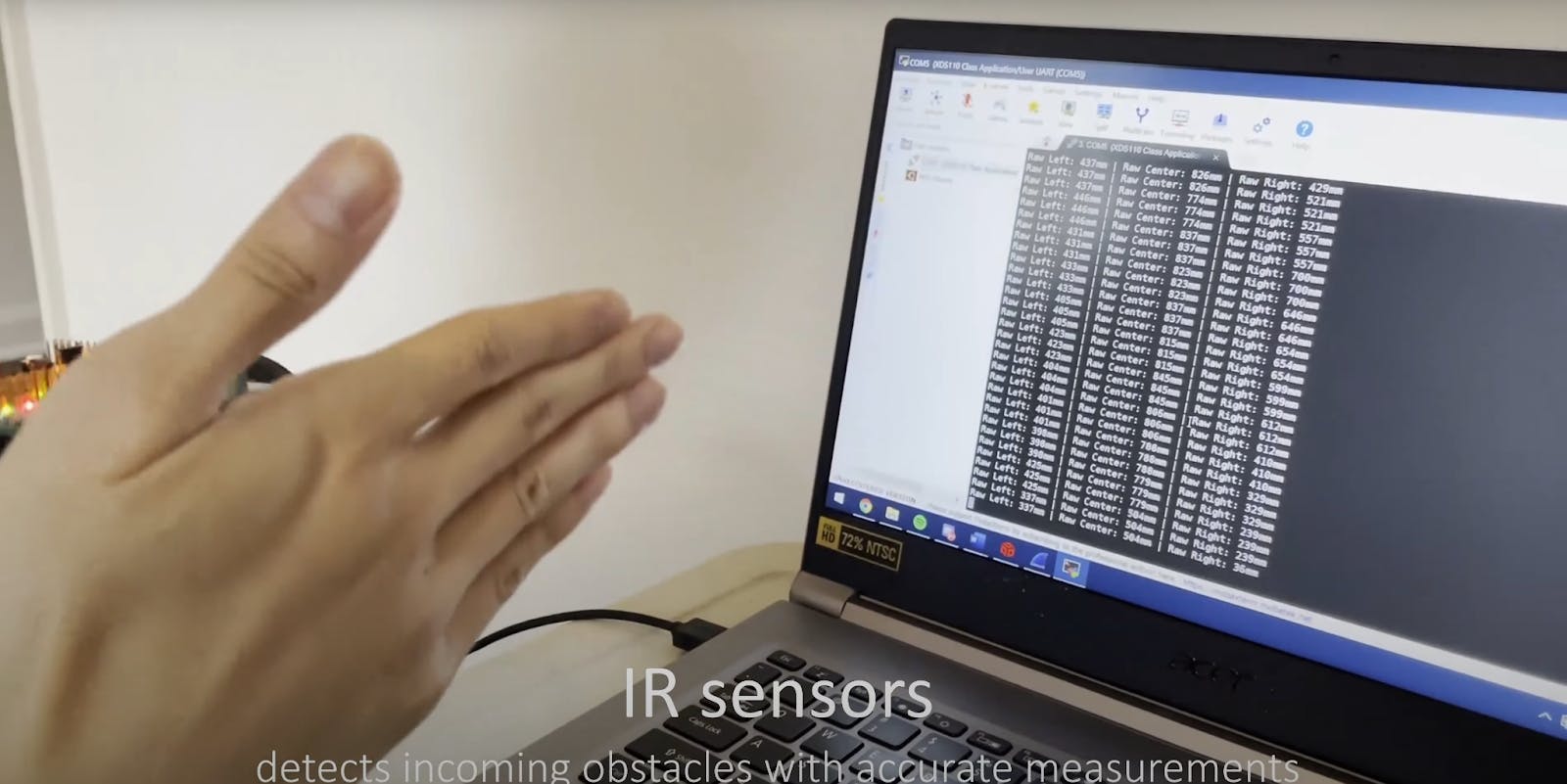
OPT3101 傳感器陣列
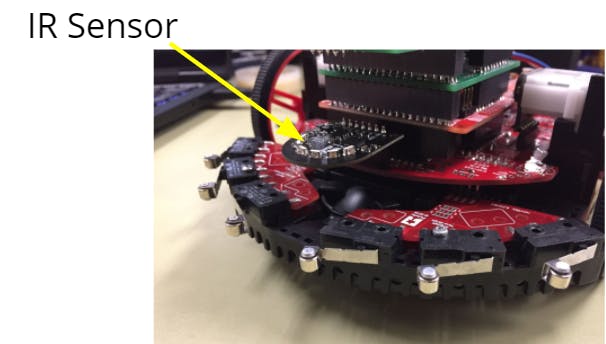
OPT3101 傳感器陣列負責在 RoboNav 模式下檢測流動站前方的障礙物,這是我們的自動駕駛系統。該組件上有三組傳感器,它們利用飛行時間來確定傳感器到任何障礙物的距離。您需要將隨附的接頭焊接到機器人的 PCB 上,以便將 IR 傳感器安裝到機器人的正面,如上圖所示。
。
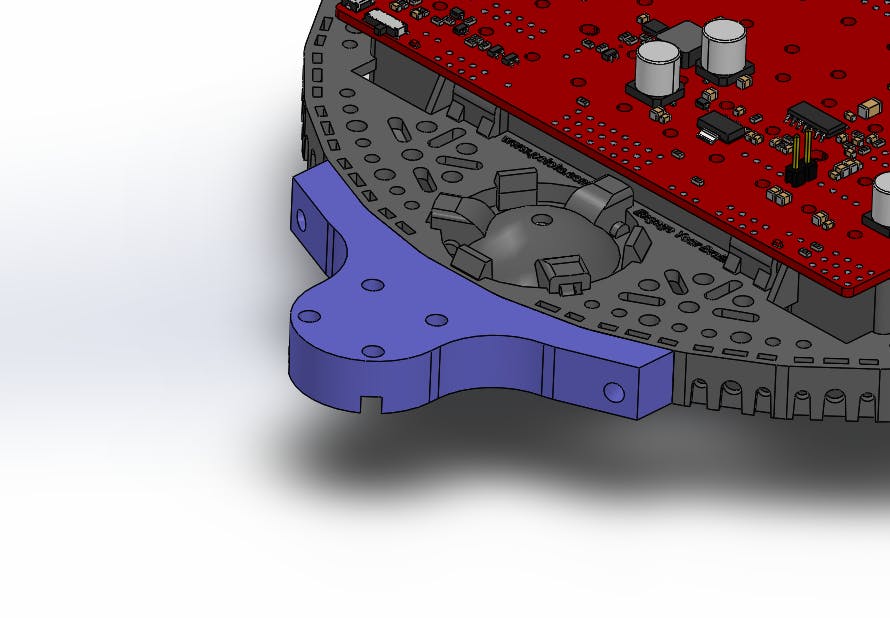
標準夾持器套件 A
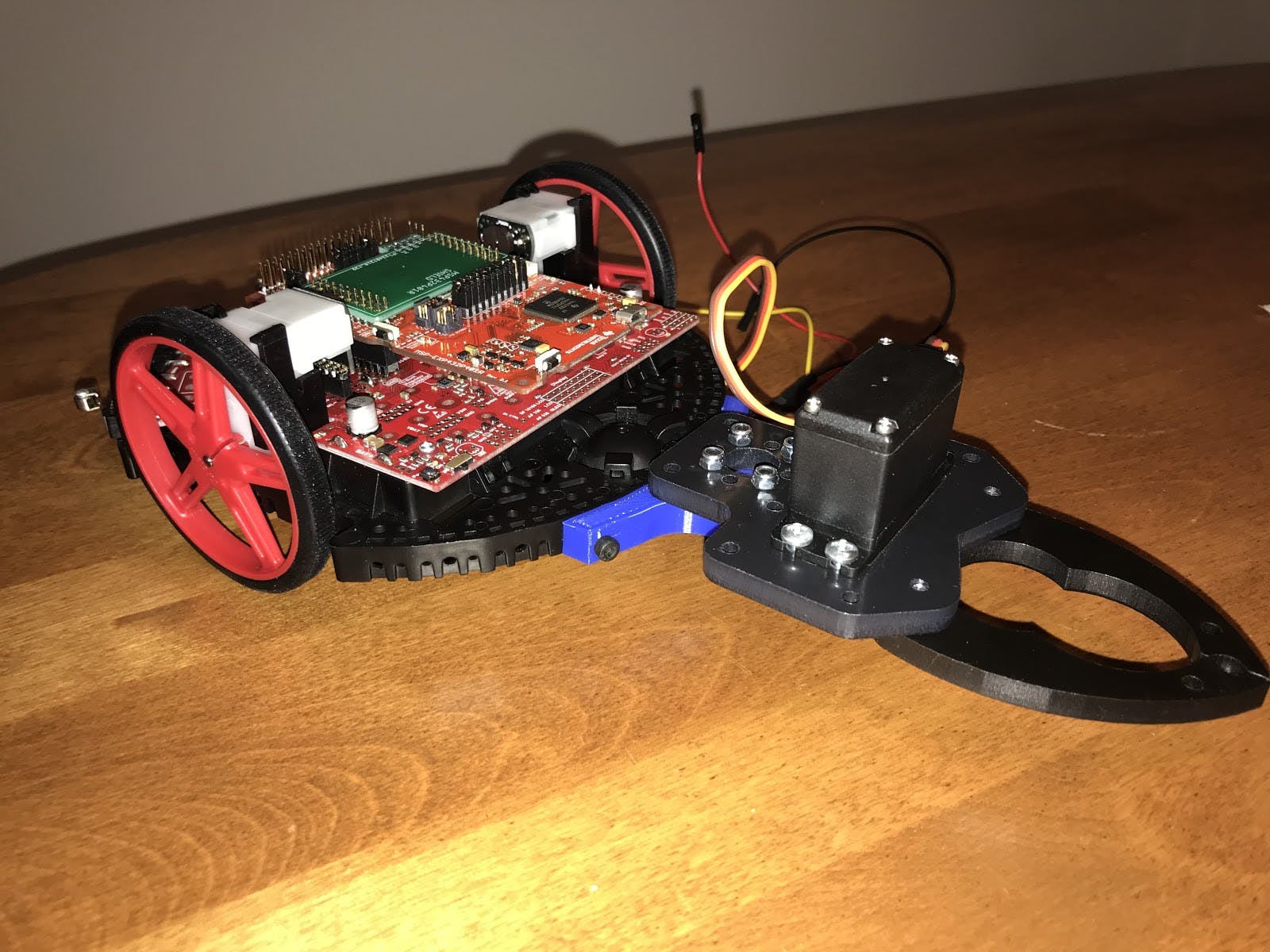
夾持器使用伺服電機以一個自由度打開和關閉手臂。手臂能夠容納一個標準的鋁罐。它安裝在底盤的后部,需要一個 3D 打印的安裝支架進行組裝。
以下是一些用于夾具功能的函數:
//opens the servo as defined by 'openDeg'
void openServo(Servo180 *servoSettings)
{
moveServoToDegree(servoSettings->openDeg, servoSettings);
}
//closes the servo as defined by 'closedDeg'
void closeServo(Servo180 *servoSettings)
{
moveServoToDegree(servoSettings->closedDeg, servoSettings);
}
//toggles between open and closed, as defined by 'closedDeg' and 'openDeg'
//if servo is not currently open or closed, the servo is moved to the open position
void toggleOpenClose(Servo180 *servoSettings)
{
if(servoSettings->degree == servoSettings->closedDeg)
openServo(servoSettings);
else if(servoSettings->degree == servoSettings->openDeg)
closeServo(servoSettings);
else
openServo(servoSettings);
}
- TI RSLK MAX增強CC3100 BoosterPack開源項目
- 如何使用遙控器控制TI-RSLK
- 用于TI RSLK MAX機器人平臺的IR RX/TX BoosterPack
- 基于TI-RSLK的導航控制機器人 0次下載
- 使用TI RSLK MAX構建聲音跟隨機器人
- 機器人系統研討會:TI RSLK MAX上的Arduino編程
- ECLinPS Max (SiGe) SPICE 建模套件
- TI-RSLK課程學習-0 課程簡介與及資料下載
- MAX5051評估套件英文產品規格書 3次下載
- MAX2078的評估套件數據手冊免費下載 0次下載
- MAX5944評估套件的數據手冊免費下載 1次下載
- TI全新開發套件簡化和消費電子產品的發布中文概述 15次下載
- 達芬奇軟件開發套件的簡化視頻設計和GPON黃金時代的到來中文概述 4次下載
- TI 永磁同步電機驅動開發套件 69次下載
- TI_max3243e數據手冊 8次下載
- MAX-IDE入門 807次閱讀
- 利用USB至JTAG接口板編程MAX1441 954次閱讀
- DeepStream智能分析套件的安裝方法 1556次閱讀
- 基于AM64x處理器的評估套件SK-AM64 2123次閱讀
- 什么是物聯網開發套件?如何挑選物聯網開發套件 5048次閱讀
- dfrobotmicro:bit造物粒子入門套件簡介 4054次閱讀
- dfrobotMiniQ智能小車探索套件簡介 1561次閱讀
- fireflyAIO-3288C主板散熱套件介紹 1070次閱讀
- dfrobot Arduino套件介紹 2056次閱讀
- dfrobotArduino官方配套套件 1267次閱讀
- 電機控制軟件開發套件啟動新設計 1617次閱讀
- Zynq UltraScale+ MPSoC ZCU102評估套件解決方案 8637次閱讀
- 淺談賽靈思 ISE 12設計套件的18問 1006次閱讀
- 一文詳解TI的grlib圖形庫移植到Atmel SAM4套件 4542次閱讀
- 賽靈思Vivado設計套件震撼登場 1799次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數據手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網監
工商網監
評論