 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
讓我們看看如何讓 Lego Ev3 機(jī)器人與 BluPants 一起工作。
注意:SD 卡鏡像已于 2020 年 10 月 31 日更新。新版本修復(fù)了錯(cuò)誤并增加了對(duì)樂高教育機(jī)器人的適當(dāng)支持。如果您運(yùn)行的是舊版本,請(qǐng)考慮更新它:
構(gòu)建你的機(jī)器人
默認(rèn)情況下,BluPants 與Gripp3r和Education Ev3機(jī)器人一起使用。組裝它們的說明可以在樂高的網(wǎng)站上找到。
您不必制造與我們完全相同的機(jī)器人。只要您以與我們?cè)跈C(jī)器人上使用相同的方式連接電機(jī),BluPants 也可以在您的機(jī)器人上無(wú)縫工作。不過,對(duì)blupants.json的額外調(diào)整可能會(huì)給您帶來(lái)更高的準(zhǔn)確性。有關(guān)詳細(xì)信息,請(qǐng)參閱“校準(zhǔn)您的機(jī)器人”部分。
BluPants 默認(rèn)設(shè)置如下:
- 爪式電機(jī)連接到端口 A
- 左輪電機(jī)連接到端口 B
- 右輪電機(jī)連接到端口 C
- 距離傳感器連接到端口 4
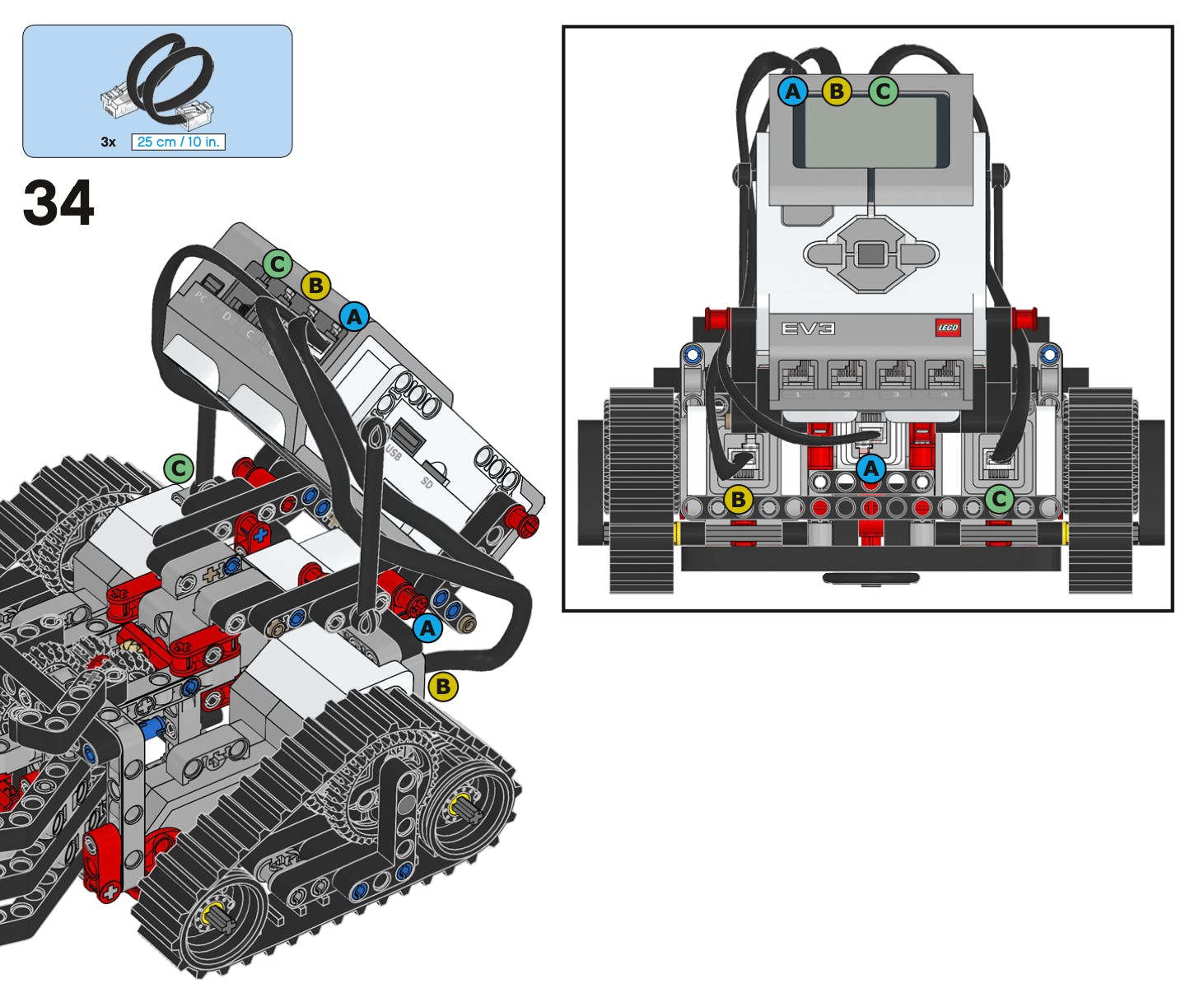
距離傳感器應(yīng)連接到端口 4。
組裝好機(jī)器人后,就可以用 BluPants 映像刷入 micro SD 卡了。無(wú)論您使用何種文檔,只要確保將正確的 BluPants 映像文件閃存到您的 SD 卡即可。
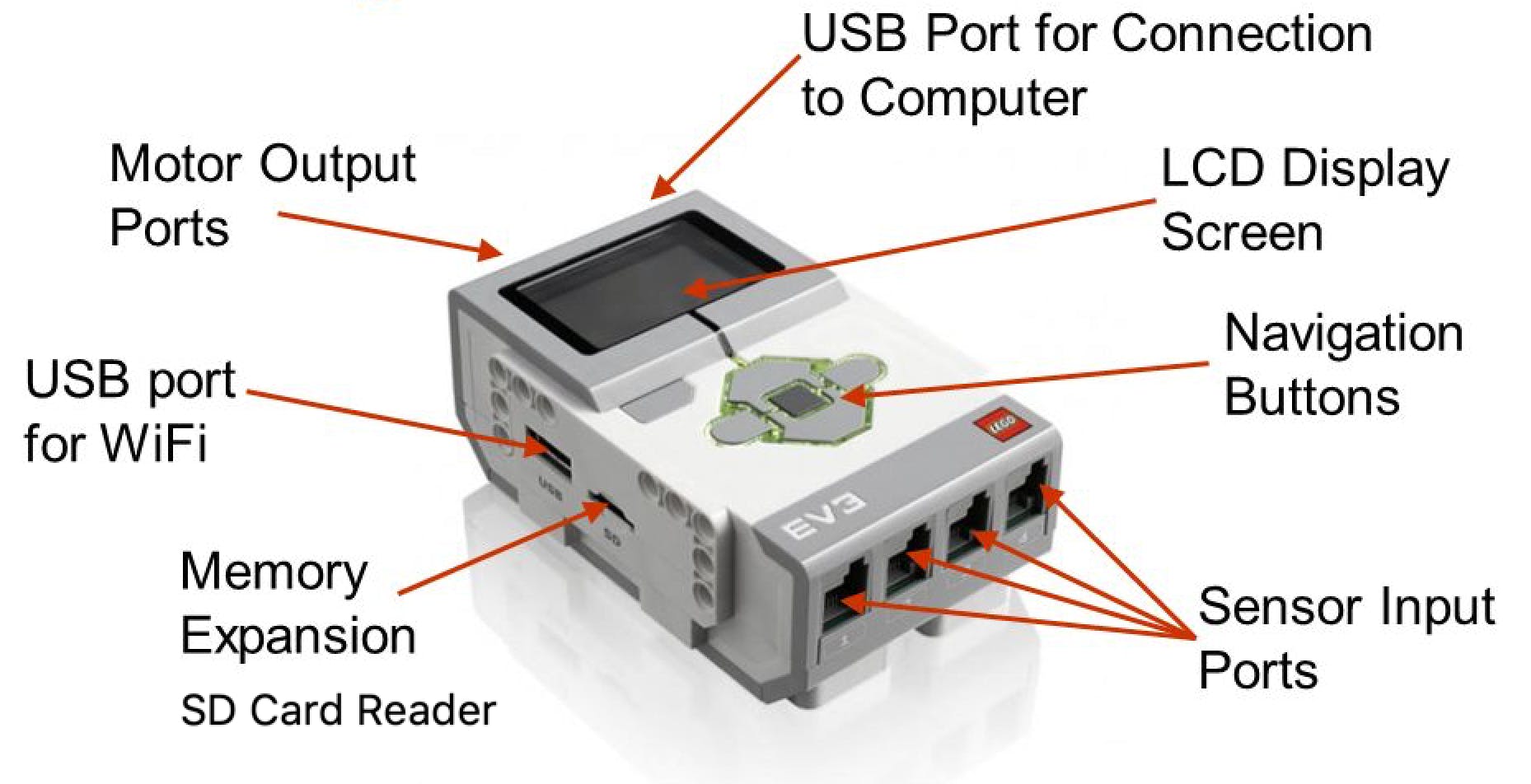
在 Ev3 積木的左側(cè)找到內(nèi)存擴(kuò)展端口(SD 卡讀卡器)。
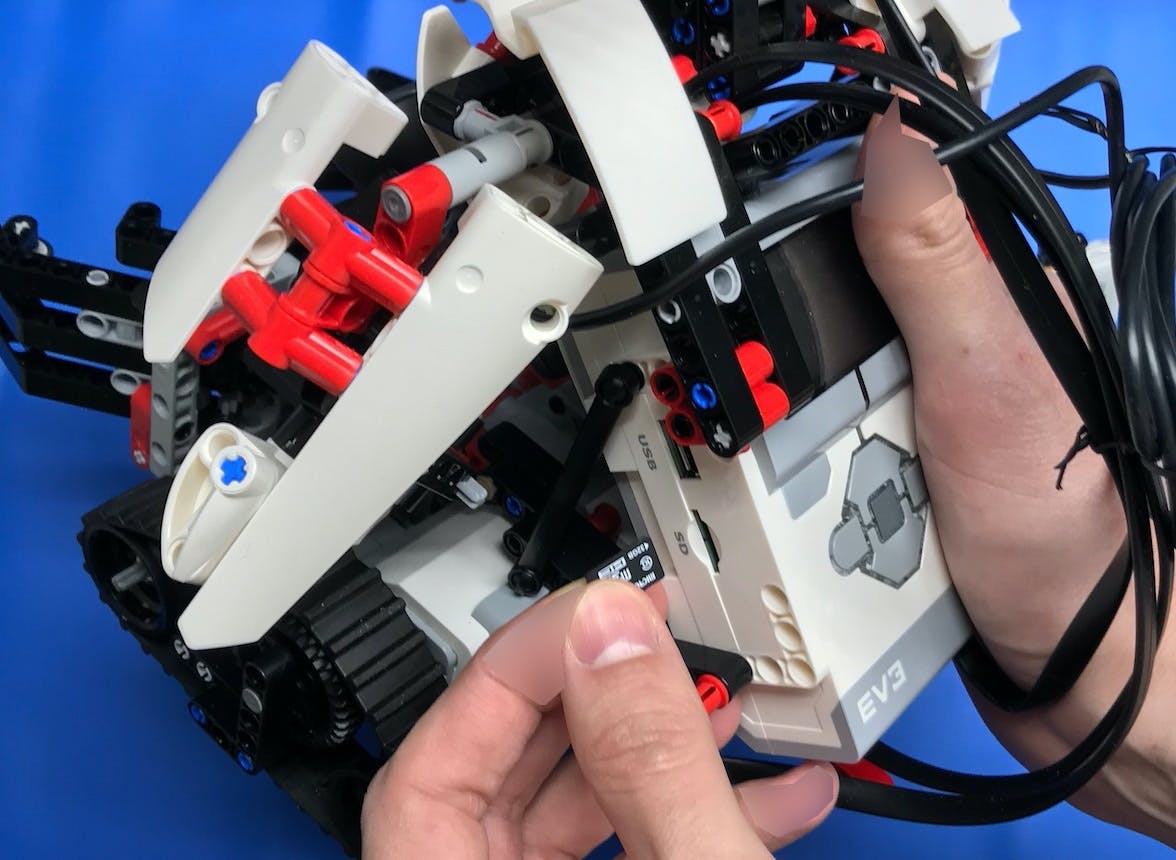
刷完 SD 卡后,關(guān)閉您的 Ev3 積木,然后插入卡,如下圖所示:
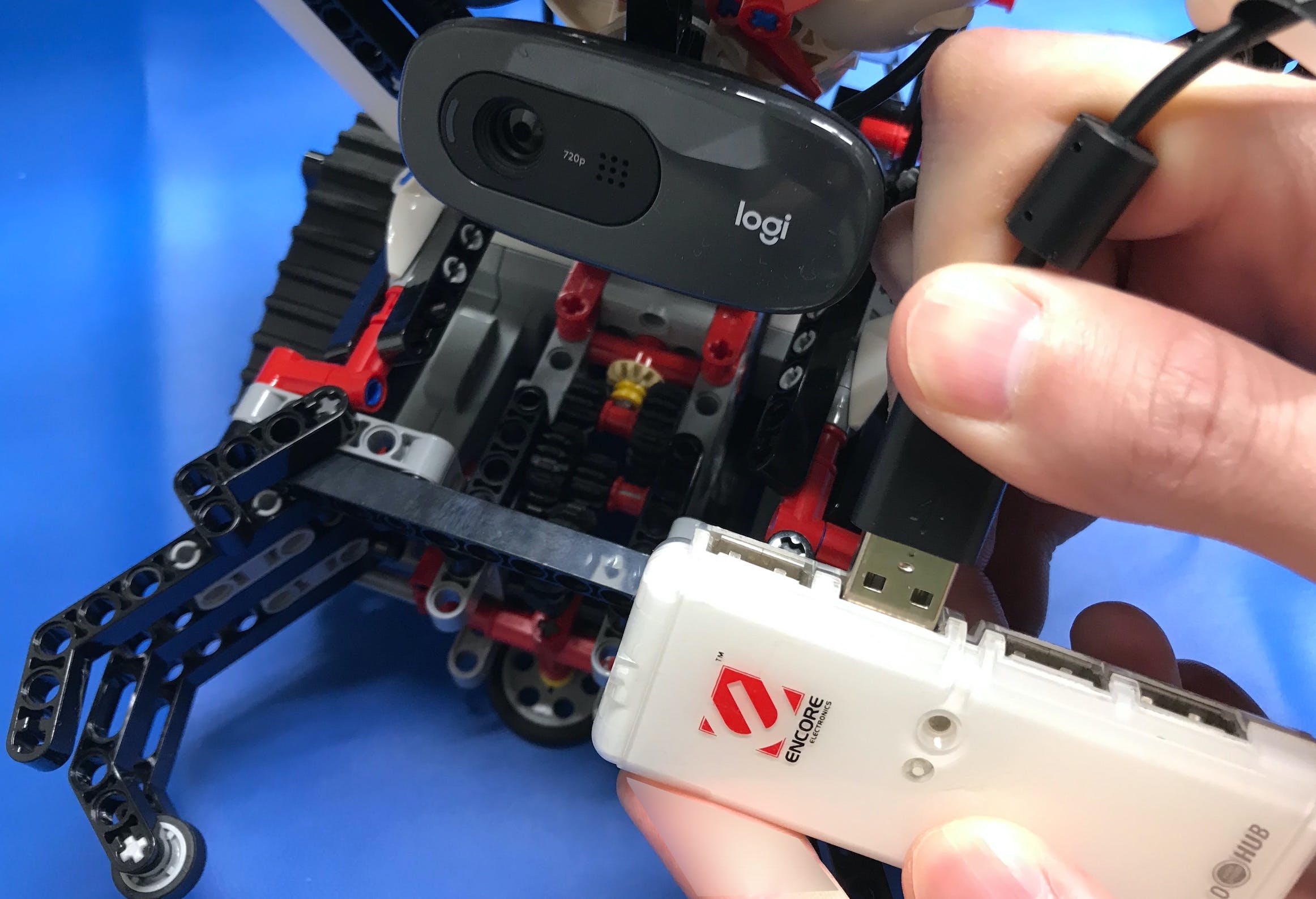
找到 WiFi 的 USB 端口并直接連接您的 USB WiFi 加密狗。或者,如果您還使用 USB 攝像頭,請(qǐng)連接 USB 集線器。在下面的圖片中,我們使用 USB 集線器連接 WiFi 加密狗和相機(jī)。
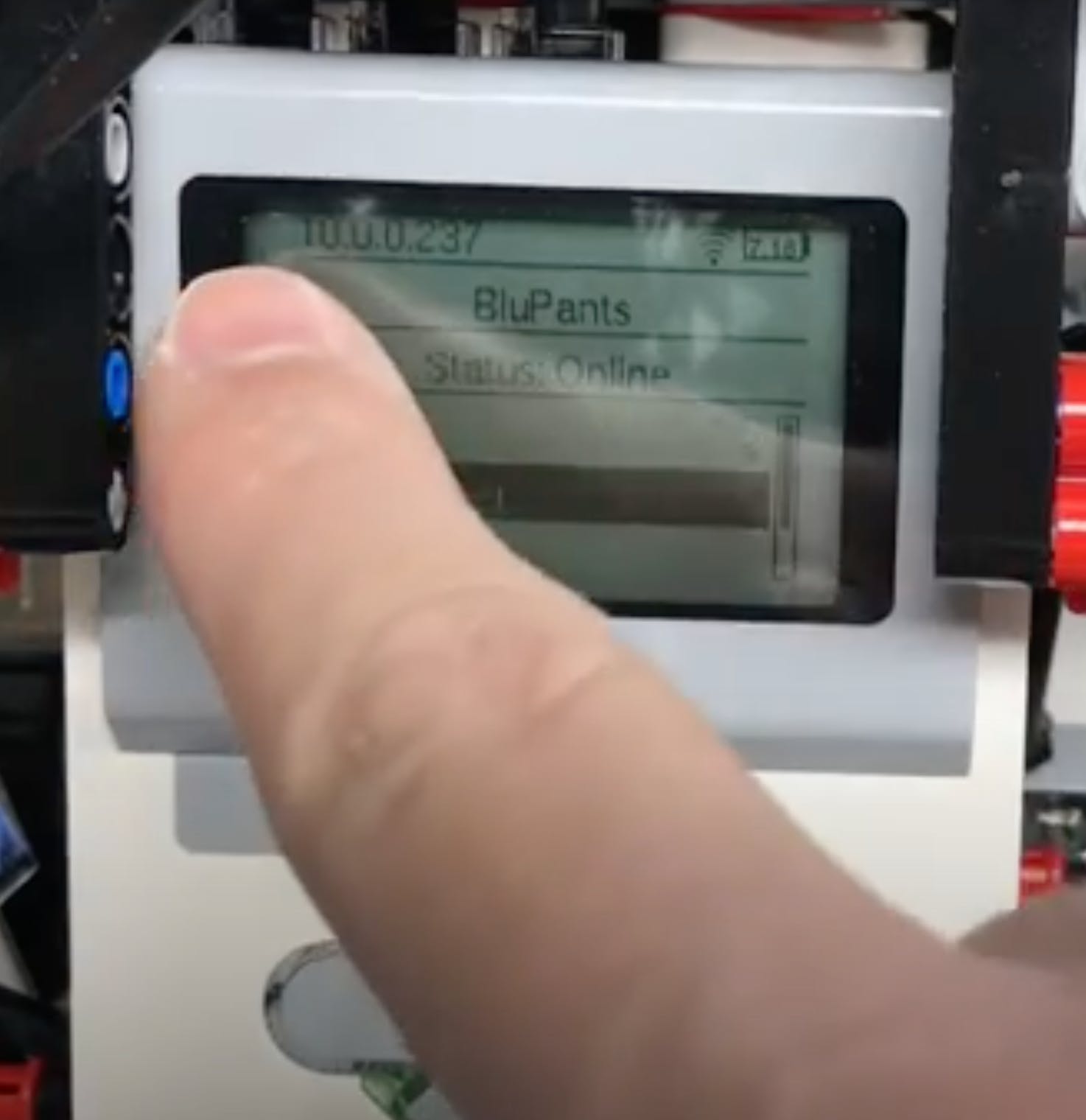
。你的很可能會(huì)有所不同。看到您的 IP 地址后,您確認(rèn)您的機(jī)器人已連接并準(zhǔn)備好開始使用 BluPants 進(jìn)行編碼。
編碼時(shí)間!
將機(jī)器人連接到 WiFi 后,打開瀏覽器并訪問http://blupants.org。確保您用于瀏覽的計(jì)算機(jī)也連接到您連接 Ev3 的同一個(gè) WiFi 網(wǎng)絡(luò)。
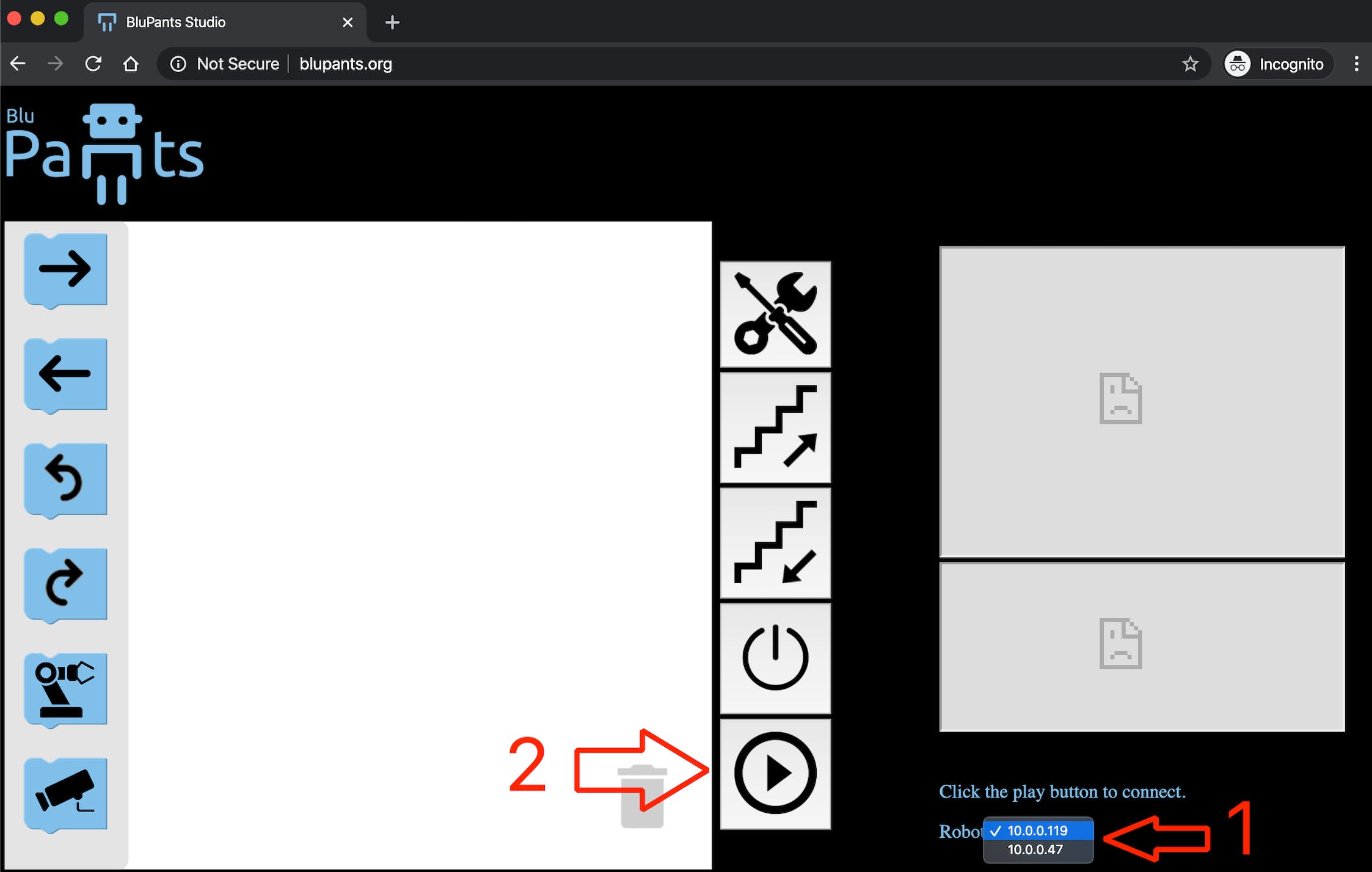
在“機(jī)器人”下拉菜單(右下角)上,確保您看到了您的 Ev3 IP 地址,然后單擊“播放”。如果您在列表中看不到任何內(nèi)容,請(qǐng)嘗試重新加載頁(yè)面和/或關(guān)閉并重新打開瀏覽器。機(jī)器人 IP 僅在頁(yè)面完全加載后顯示:
就是這樣!您已準(zhǔn)備好使用 BluPants 提高您的編碼技能。
請(qǐng)記住,BluPants 是一個(gè)多平臺(tái)的編碼環(huán)境。這意味著,您可以使用 Lego Ev3 享受相同的學(xué)習(xí)體驗(yàn),也可以使用更實(shí)惠的機(jī)器人來(lái)完成,例如 Beaglebones 和 RaspberryPies。
查看 BluPants Youtube 頻道,或訪問www.blupants.com以獲取有關(guān)如何以輕松有趣的方式學(xué)習(xí)編碼的更多示例和詳細(xì)信息。在Twitter 上關(guān)注我們以隨時(shí)關(guān)注所有新版本。
機(jī)器人配置文件
您可以通過編輯其配置文件來(lái)更改您的機(jī)器人設(shè)置。所有設(shè)置都可以通過編輯機(jī)器人本地 Linux 文件系統(tǒng)上的“/root/blupants.json”文件來(lái)自定義。您可以像訪問任何常規(guī) Linux 機(jī)器一樣訪問和編輯配置文件。我們將介紹兩個(gè)選項(xiàng):
您應(yīng)該做的第一件事是使用默認(rèn)憑據(jù)登錄機(jī)器人并更改密碼。在 EV3 積木 LCD 顯示屏的左上角檢查您的機(jī)器人 IP 地址。就我而言,它是:“10.0.0.237”。
您的機(jī)器人的默認(rèn)憑據(jù)是:
user: root
password: temppwd
從您的本地計(jì)算機(jī)運(yùn)行以下命令以連接到您的機(jī)器人并在那里打開一個(gè)外殼:
macOS / Linux
$ ssh root@10.0.0.237
帶有膩?zhàn)拥拇皯?/font>
C:\Users\user>putty root@10.0.0.237
請(qǐng)記住將“10.0.0.237”替換為您的特定機(jī)器人 IP 地址。
提供密碼“tempppwd”。
% ssh root@10.0.0.237
Password:
Linux ev3dev 4.14.117-ev3dev-2.3.5-ev3 #1 PREEMPT Sat Mar 7 12:54:39 CST 2020 armv5tejl
_____ _
_____ _|___ / __| | _____ __
/ _ \ \ / / |_ \ / _` |/ _ \ \ / /
| __/\ V / ___) | (_| | __/\ V /
\___| \_/ |____/ \__,_|\___| \_/
Debian stretch on LEGO MINDSTORMS EV3!
Last login: Sat Oct 31 16:44:25 2020 from 10.0.0.34
root@ev3dev:~#
登錄后,通過運(yùn)行命令“passwd”更改密碼:
root@ev3dev:~# passwd
Enter new UNIX password:
Retype new UNIX password:
passwd: password updated successfully
提供您的新密碼,并確保記住它。從現(xiàn)在開始,您將在需要登錄 EV3 Linux 系統(tǒng)時(shí)使用它。
轉(zhuǎn)到 /root 文件夾并確保那里有可用的 blupants.json 文件
root@ev3dev:~# cd /root
root@ev3dev:~# ls
blupants_ev3_gripp3r.json blupants_ev3.json blupants.json
root@ev3dev:~#
現(xiàn)在,您可以使用您喜歡的文本編輯器(例如 nano 或 vi)來(lái)編輯文件。
root@ev3dev:~# vi blupants.json
或者
root@ev3dev:~# nano blupants.json
或者,您可以復(fù)制要在本地計(jì)算機(jī)上編輯的文件,并在那里使用它。為此,您甚至不需要在 ssh 會(huì)話上登錄您的 Ev3。在您的本地計(jì)算機(jī)上,只需運(yùn)行“scp”或“pscp”即可將 blupants.json 配置文件從機(jī)器人復(fù)制到您的計(jì)算機(jī):
macOS / Linux
$ scp root@10.0.0.237:/root/blupants.json .
帶有膩?zhàn)拥拇皯?/font>
C:\Users\user>pscp -P 22 root@10.0.0.237:/root/blupants.json .
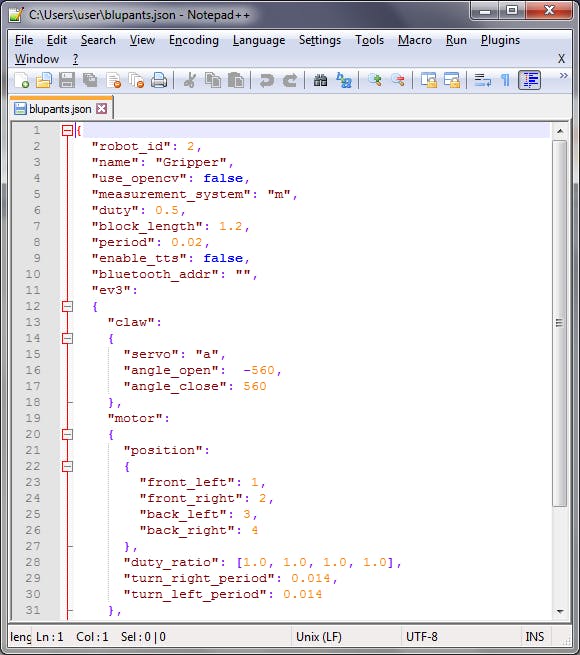
然后,您可以使用您喜歡的文本編輯器在本地計(jì)算機(jī)上打開 blupants.json 文件進(jìn)行編輯。對(duì)于 Windows 用戶,我們建議使用Notepad++ 。Notepad++ 可以在這里下載。
訪問下一部分,了解如何通過更改默認(rèn)配置文件來(lái)校準(zhǔn)您的機(jī)器人。然后,一旦你完成編輯,保存它,并將其復(fù)制回你的機(jī)器人:
macOS / Linux
$ scp blupants.json root@10.0.0.237:/root/blupants.json
帶有膩?zhàn)拥拇皯?/font>
C:\Users\user>pscp -P 22 blupants.json root@10.0.0.237:/root/blupants.json
永遠(yuǎn)記得用機(jī)器人的 IP 地址替換“10.0.0.237”。
請(qǐng)記住,配置文件必須符合 json 格式。如果您破壞它,機(jī)器人將停止工作,直到您提供另一個(gè)有效的配置文件。假設(shè)您完全破壞了 blupants.json 文件。如果發(fā)生這種情況,您需要做的就是從GitHub獲取原始副本并將其恢復(fù)到您的機(jī)器人,替換損壞的文件。
例如,如果您需要恢復(fù)教育文件,請(qǐng)從此鏈接獲取原始內(nèi)容并使用“scp”或“pscp”將其復(fù)制回機(jī)器人的 /root/blupants.json 文件。如果您需要原始 Gripp3r 配置的副本,可以從此鏈接獲取。
現(xiàn)在您知道如何訪問您的配置文件,讓我們看看如何更改它以校準(zhǔn)您的機(jī)器人并使其更準(zhǔn)確。
校準(zhǔn)您的機(jī)器人
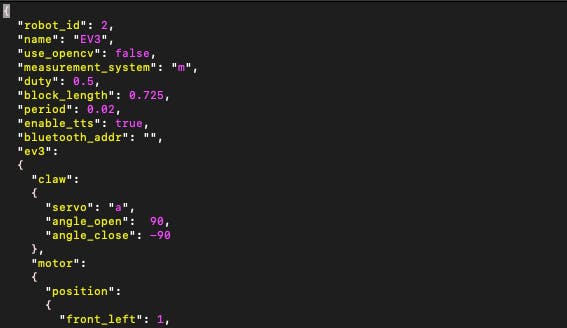
要校準(zhǔn)您的機(jī)器人,您需要編輯 blupants.json 配置文件。訪問上一節(jié)以了解如何訪問您的 blupants.json 文件以進(jìn)行編輯。這是標(biāo)準(zhǔn) blupants.json 文件的有效格式:
{
"robot_id": 2,
"name": "EV3",
"use_opencv": false,
"measurement_system": "m",
"duty": 0.5,
"block_length": 0.725,
"period": 0.02,
"enable_tts": true,
"bluetooth_addr": "",
"ev3":
{
"claw":
{
"servo": "a",
"angle_open": 90,
"angle_close": -90
},
"motor":
{
"position":
{
"front_left": 1,
"front_right": 2,
"back_left": 3,
"back_right": 4
},
"duty_ratio": [1.0, 1.0, 1.0, 1.0],
"turn_right_period": 0.007,
"turn_left_period": 0.007
},
"camera":
{
"servo_horizontal": "c",
"servo_vertical": "d"
}
}
}
永遠(yuǎn)不應(yīng)更改該字段。"robot_id": 2對(duì)于所有樂高 Ev3 機(jī)器人,該值應(yīng)始終為 2。
但是,可以自定義該字段"name",它將幫助您識(shí)別您的機(jī)器人,特別是如果您有多個(gè)機(jī)器人連接到同一網(wǎng)絡(luò)。要有創(chuàng)意,給你的機(jī)器人起一個(gè)很酷的名字。
由于樂高硬件不幸不支持 OpenCV,因此該字段被忽略。"use_opencv"
現(xiàn)場(chǎng)"measurement_system": "m"告訴機(jī)器人在使用超聲波傳感器測(cè)量距離時(shí)使用公制。如果要使用皇家系統(tǒng),將其更改為“r”:
"measurement_system": "r",
如果您使用的是紅外傳感器,則忽略此字段。測(cè)量值(范圍從 0 到 60)將顯示為厘米。
該字段"duty": 0.5告訴機(jī)器人在旋轉(zhuǎn)車輪上使用的電機(jī)時(shí)使用 50% 的功率。它可以設(shè)置為從 0(無(wú)功率)到 1(全功率/100%)的任何值。
該字段"block_length"告訴您的機(jī)器人在當(dāng)前任務(wù)向前移動(dòng)一格時(shí)將行進(jìn)多少。假設(shè)您正在處理一張小地圖,您可能想要減小“block_length”的值。對(duì)于更大的地圖,您可能需要增加它。
該字段"period"未使用。
該字段"enable_tts": true將啟用文本到語(yǔ)音模塊。如果要禁用它,請(qǐng)將其設(shè)置為 false。禁用 TTS 時(shí),機(jī)器人執(zhí)行命令的速度更快。如果您打算使用函數(shù)say() ,則需要啟用 TTS 才能聽到機(jī)器人說話。
字段"bluetooth_addr"未使用。
該字段"ev3"->"claw"->"servo":"a"定義了您連接爪式電機(jī)的端口。假設(shè)端口 A、B 和 C 已被占用,您需要將其連接到端口 D。將值更改為“servo”:“d”。
該字段"ev3"->"claw"->"angle_open":"90"告訴您的伺服電機(jī)必須旋轉(zhuǎn)多少度,以便您的機(jī)器人可以張開爪子。類似地,"ev3"->"claw"->"angle_close":"-90"定義閉合角度。請(qǐng)注意,與 Gripper 相比,Educational 機(jī)器人將使用截然不同的角度。如果您組裝一個(gè)完全不同的爪,根據(jù)其物理特性,您可能需要相應(yīng)地自定義這些設(shè)置。
字段"ev3"->"motor"->"position"定義電機(jī)的順序。如果您在編寫 Ev3 時(shí)使用函數(shù)set_motors() ,這一點(diǎn)尤其重要。
字段"ev3"->"motor"->"duty_ratio": [1.0, 1.0, 1.0, 1.0],可用于補(bǔ)償一個(gè)車輪旋轉(zhuǎn)速度更快的一些問題。像這樣的問題會(huì)阻止機(jī)器人直行。數(shù)組中的第一個(gè)“1.0”定義了位置“1”(默認(rèn)為front_left)定義的電機(jī)的系數(shù),第二個(gè)“1.0”是定義為位置“2”的電機(jī)的系數(shù),依此類推。例如,假設(shè)您的機(jī)器人在編程為直線移動(dòng)時(shí)會(huì)向左移動(dòng)一點(diǎn)。如果這是因?yàn)橛译姍C(jī)的運(yùn)行速度比左電機(jī)快而引起的,您可以通過降低右電機(jī)的值來(lái)調(diào)整 duty_ratio 來(lái)彌補(bǔ)這一點(diǎn)。例如:
"duty_ratio": [1.0, 0.95, 1.0, 1.0],
它將使正確的電機(jī)運(yùn)行速度慢 5%,并可能補(bǔ)償由于一個(gè)電機(jī)運(yùn)行速度比另一個(gè)電機(jī)快而引起的物理問題。
領(lǐng)域"ev3"->"motor"->"turn_right_period"和"ev3"->"motor"->"turn_left_period"是類似的。如果您將機(jī)器人編程為向右轉(zhuǎn) 90 度,但實(shí)際上它最終只轉(zhuǎn)了 60 度,您需要增加“turn_right_period”的值以正確校準(zhǔn)它。同樣,假設(shè)您將機(jī)器人編碼為向左轉(zhuǎn) 90 度,而它轉(zhuǎn)為 140 度。您將需要減少“turn_left_period”值來(lái)解決這個(gè)問題。
當(dāng)前未使用字段。"ev3"->"camera"它們旨在定義傾斜相機(jī)伺服連接到哪個(gè)端口。
參考
Lego Ev3 的 BluPants 圖像基于開源項(xiàng)目ev3dev 。我們要感謝 ev3dev 社區(qū)所做的出色工作。如果您想了解更多關(guān)于 ev3dev 的信息,請(qǐng)?jiān)L問:www.ev3dev.org 。
- 利用ev3 教程制作的手臂機(jī)器人
- LEGO EV3 Baby Yoda-Alexa控制的EV3機(jī)器人
- 由Mindstorms EV3和Alexa提供支持的LEGO Target Practice
- 由Alexa控制的Lego Mindstorms EV3機(jī)器人
- Vernie的語(yǔ)音控制,基于LEGO的機(jī)器人
- KUKA機(jī)器人編程 0次下載
- 使用LEGO MINDSTORMS EV3 Amazon Alexa構(gòu)建的Shelly解決方案
- LEGO EV3神話生物DNA掃描儀開源
- ESP01S和Android 7+的移動(dòng)設(shè)備一起工作的項(xiàng)目
- EV3使用NXT Hitechnic觸摸多路復(fù)用器
- Alexa EV3糖果機(jī)開源分享
- 機(jī)器人無(wú)線充電電路設(shè)計(jì) 47次下載
- 基于DSP和PC的農(nóng)業(yè)機(jī)器人控制系統(tǒng) 17次下載
- 桌面式工作站ABB機(jī)器人培訓(xùn)指導(dǎo)手冊(cè) 1次下載
- 協(xié)作機(jī)器人的介紹及其與工業(yè)機(jī)器人規(guī)模的差距介紹 8次下載
- 面對(duì)疫情 醫(yī)療機(jī)器人能幫上什么忙? 2126次閱讀
- 一文看懂服務(wù)機(jī)器人發(fā)展前景 2519次閱讀
- ABB工業(yè)機(jī)器人的系統(tǒng)備份與恢復(fù)如何操作 1.3w次閱讀
- 機(jī)器視覺的機(jī)器人取代四臺(tái)傳統(tǒng)的火焰處理機(jī)器人 3270次閱讀
- 工業(yè)機(jī)器人結(jié)構(gòu)、驅(qū)動(dòng)及技術(shù)指標(biāo)詳解 3051次閱讀
- 這些水下機(jī)器人你見過嗎?一些水下機(jī)器人產(chǎn)品的介紹 1.4w次閱讀
- 云視頻技術(shù)讓機(jī)器人更具有娛樂性讓機(jī)器人更融入你的生活 3520次閱讀
- 基于PLC的機(jī)器人伺服運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì)詳解 1.5w次閱讀
- 軟體機(jī)器人 前所未見的機(jī)器人 3692次閱讀
- 何為柔性機(jī)器人?如何讓機(jī)器人的身體柔若無(wú)骨? 1.1w次閱讀
- 機(jī)器人控制系統(tǒng)一文讓你全看懂 7431次閱讀
- 3種奇葩機(jī)器人的簡(jiǎn)單介紹 5321次閱讀
- 《工業(yè)機(jī)器人技術(shù)及應(yīng)用》讓人從認(rèn)識(shí)到熟練掌握工業(yè)機(jī)器人 6437次閱讀
- 智能機(jī)器人的三大關(guān)鍵技術(shù)詳解 3.2w次閱讀
- 細(xì)數(shù)讓工業(yè)機(jī)器人更智能的6種傳感器 2441次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1普中科技HC6800-EM3使用操作手冊(cè)
- 21.69 MB | 3次下載 | 2 積分
- 2PL4807單節(jié)鋰離子電池充電器中文手冊(cè)
- 1.36 MB | 2次下載 | 免費(fèi)
- 3智能小車proteus仿真+C源程序
- 0.02 MB | 1次下載 | 免費(fèi)
- 4TMR技術(shù)在電流傳感器中的應(yīng)用
- 616.47 KB | 1次下載 | 免費(fèi)
- 5開關(guān)電源設(shè)計(jì)原理手冊(cè)
- 1.83 MB | 1次下載 | 免費(fèi)
- 6BQ769142技術(shù)參考手冊(cè)
- 2.99MB | 1次下載 | 免費(fèi)
- 7CBM8605_8606_8608-運(yùn)算放大器【中文排版】-202406271735
- 2.70 MB | 1次下載 | 免費(fèi)
- 801-07-06-CBM8655_CBM8656精密運(yùn)算放大器
- 4.49 MB | 1次下載 | 免費(fèi)
本月
- 1XL4015+LM358恒壓恒流電路圖
- 0.38 MB | 154次下載 | 1 積分
- 2PCB布線和布局電路設(shè)計(jì)規(guī)則
- 0.40 MB | 35次下載 | 免費(fèi)
- 3智能門鎖原理圖
- 0.39 MB | 13次下載 | 免費(fèi)
- 4GB/T4706.1-2024 家用和類似用途電器的安全第1部分:通用要求
- 7.43 MB | 11次下載 | 1 積分
- 5JESD79-5C_v1.30-2024 內(nèi)存技術(shù)規(guī)范
- 2.71 MB | 10次下載 | 免費(fèi)
- 6elmo直線電機(jī)驅(qū)動(dòng)調(diào)試細(xì)則
- 4.76 MB | 9次下載 | 6 積分
- 7WIFI智能音箱原理圖完整版
- 0.09 MB | 7次下載 | 10 積分
- 8PC1013三合一快充數(shù)據(jù)線充電芯片介紹
- 1.03 MB | 7次下載 | 免費(fèi)
總榜
- 1matlab軟件下載入口
- 未知 | 935115次下載 | 10 積分
- 2開源硬件-PMP21529.1-4 開關(guān)降壓/升壓雙向直流/直流轉(zhuǎn)換器 PCB layout 設(shè)計(jì)
- 1.48MB | 420061次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233084次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191367次下載 | 10 積分
- 5十天學(xué)會(huì)AVR單片機(jī)與C語(yǔ)言視頻教程 下載
- 158M | 183333次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81581次下載 | 10 積分
- 7Keil工具M(jìn)DK-Arm免費(fèi)下載
- 0.02 MB | 73806次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65985次下載 | 10 積分





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論