 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
第一步:問“為什么?”
沒有逃避它。在一年中的大部分時間里,加拿大都會遭受極度寒冷和強降雪。許多人從事的是城市低端工人操作除雪設備的工作。與此同時,房主的任務是自己鏟土、支付服務費用或依賴鄰居,這在任何情況下都會導致花費大量時間和受傷風險,尤其是對老年人而言。
我們相信,我們可以更好地利用我們可用的人工智能,并通過自動化加拿大的除雪過程來改善人們的生活。
我們沒有憑空制造自動掃雪機。首先,我們利用我們的電子和軟件知識構建了小型工作原型,我們將從中學習并將其應用到我們的全尺寸產品中。
第 2 步:繪制大圖
簡而言之,我們的設計分為四個階段:
1) 安全——我們如何預防緊急情況并實施故障保險?
2) 機械和建筑——我們要怎么做?
3) 電機控制——我們如何控制電機?
4) 同時定位和路徑導航——它如何知道它在哪里以及要去哪里?
第一階段 - 安全
至于安全措施,我們希望確保有三種機制可以在緊急情況下關閉掃雪機:
1) 通過急停按鈕機械關閉
2) 監控系統的人員遠程關閉
3) 如果系統檢測到需要關閉軟件的情況
第 2 階段 - 機械設計和組裝
費用說明:
當我們最初構思這個項目時,我們希望在不做出不必要的犧牲的情況下盡可能降低成本。我們的贊助商問我們的自動掃雪機要花多少錢,我們口頭估計“稅后 2000-3000加元(或大約 2000 美元)”。
我們希望我們的掃雪機性能良好且具有成本效益。因此,雖然大部分項目材料來自加拿大,但我們也從美國、中國和臺灣采購零件。
有關項目成本的明細,請參見此處。
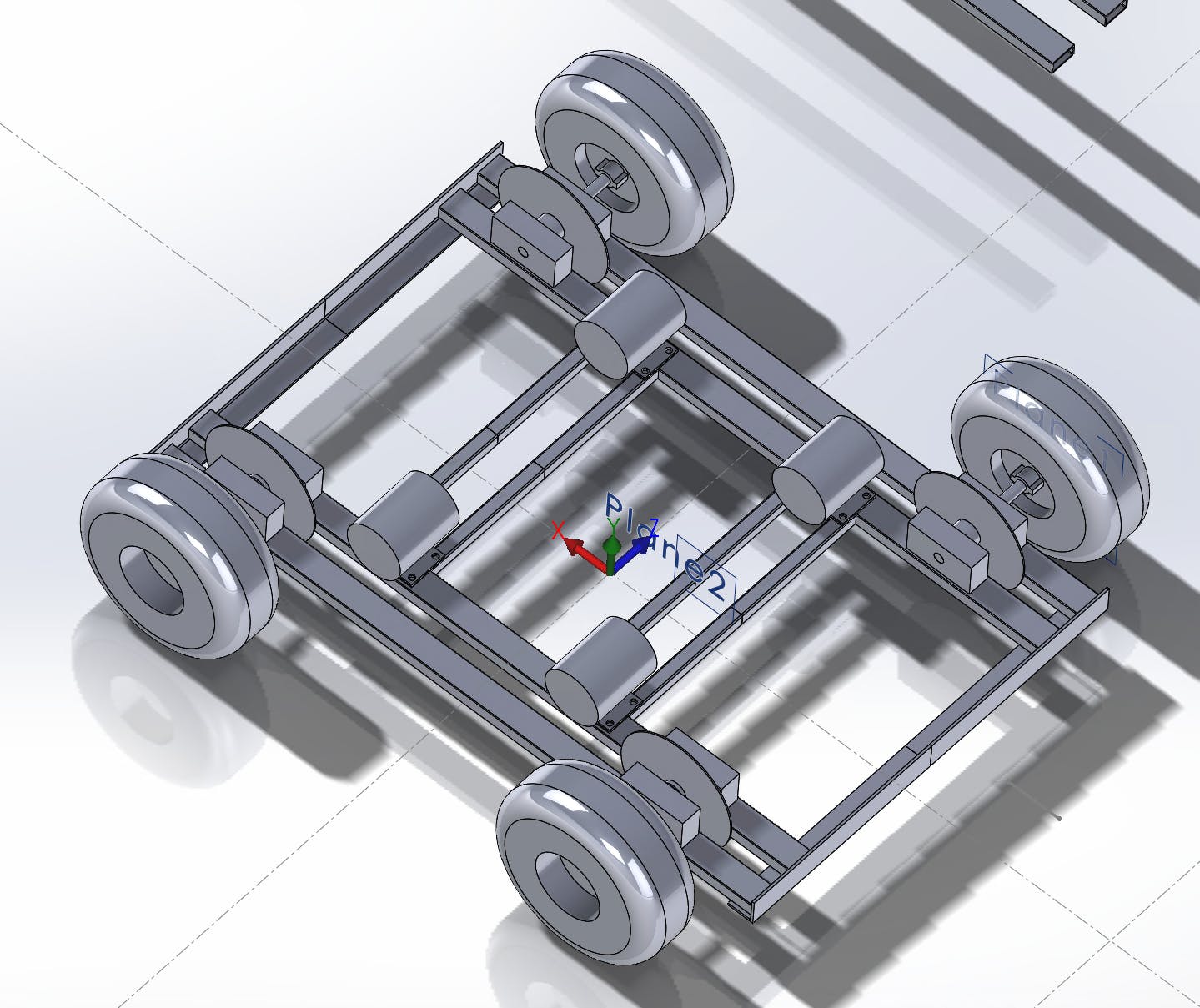
框架概念:
我們想設計一個簡單、堅固、易于構建、具有成本效益且可調節的框架。首先,我們知道我們的框架需要支撐電機以及很大的重量(這是掃雪機獲得足夠牽引力所必需的)。
動力傳動系統概念:固定齒輪自行車(四倍)
在決定我們的掃雪機的最佳動力傳動系統時,我們從可追溯到 1800 年代的設計中汲取了靈感:固定齒輪自行車。
我們的動力傳動系統決定取決于幾個因素,包括成本、制造的難易程度以及我們構思和可視化其工作方式的能力。
我們選擇不使用輪椅電機,因為我們不希望增加成本、速度不靈活(在僅使用輪椅電機輸出的情況下)以及難以安裝在我們構想的框架上。
第 3 階段 - 電機控制
該團隊決定使用四個BTS7960電機驅動器。對于那些做過小型機器人項目的人(包括團隊中的一些成員)來說,L298N是一種常見的電機驅動器。BTS7960 沒有太大區別,但額定電流高達 40 安培,非常適合我們的大電流應用。
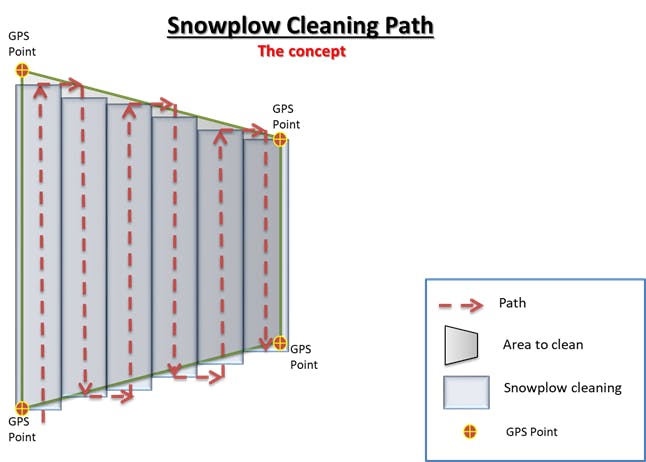
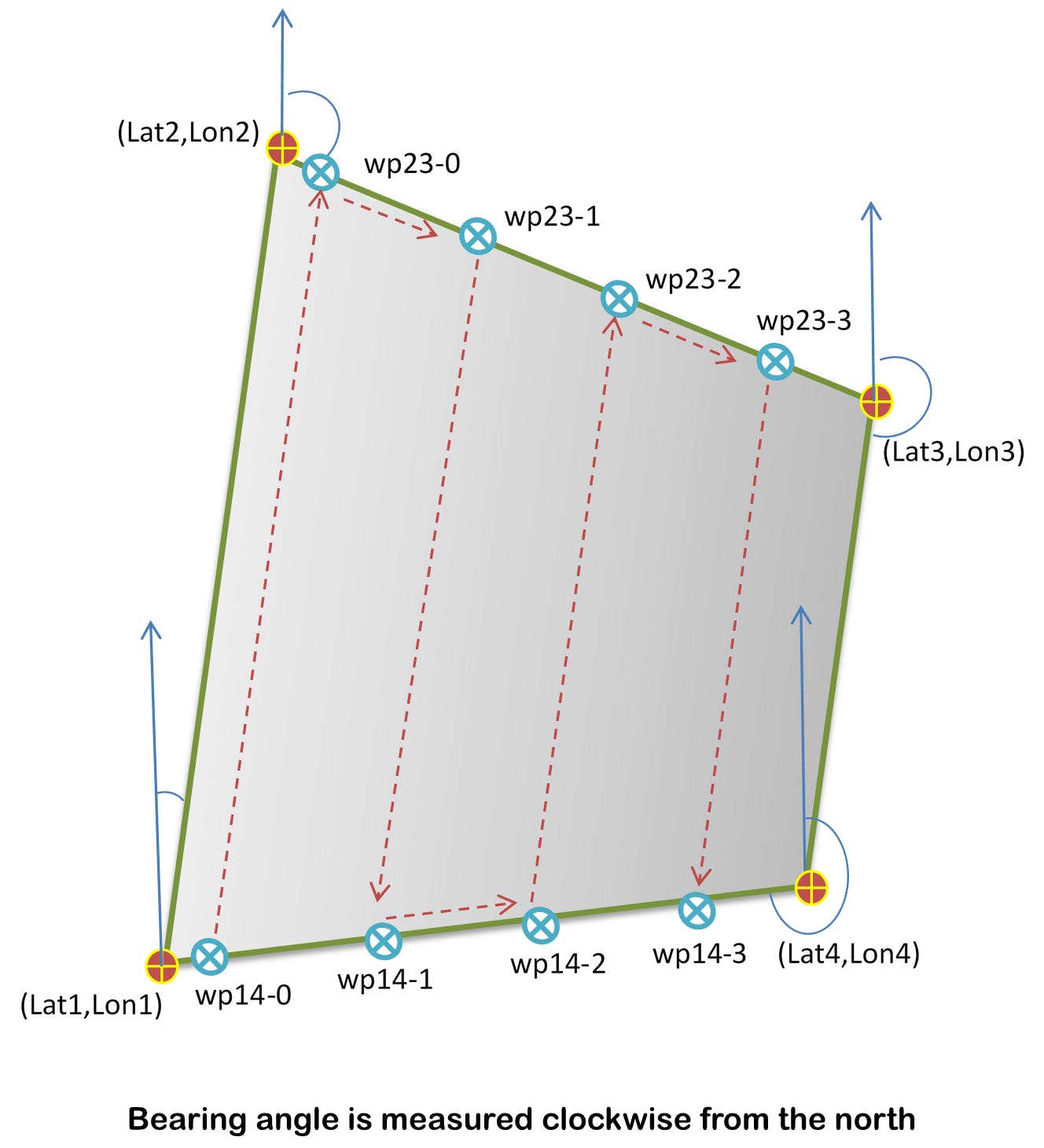
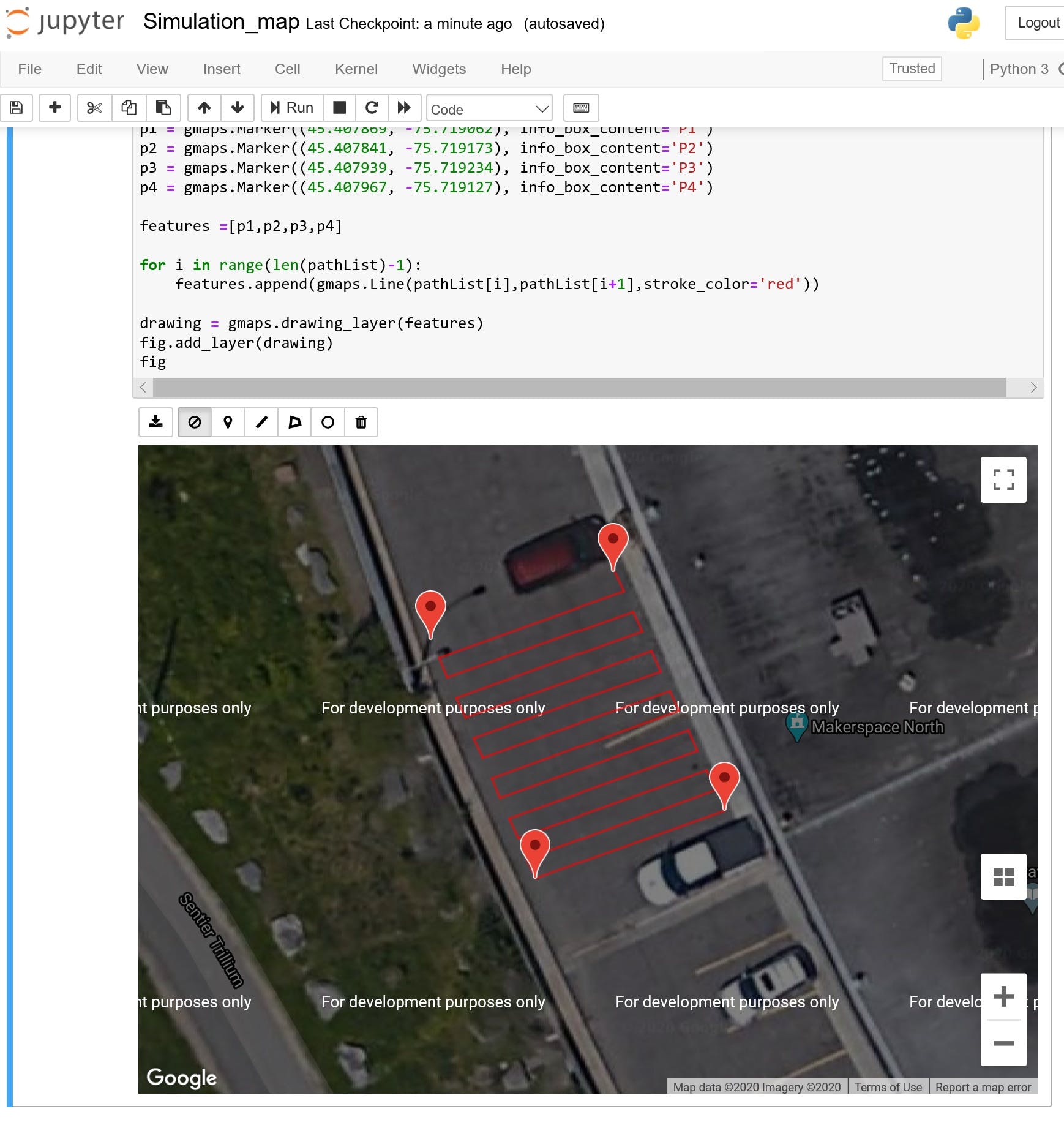
第 4 階段-同時定位和路徑導航
以下兩張圖片展示了我們的掃雪機清潔概念的高級視圖
第 3 步:開始構建
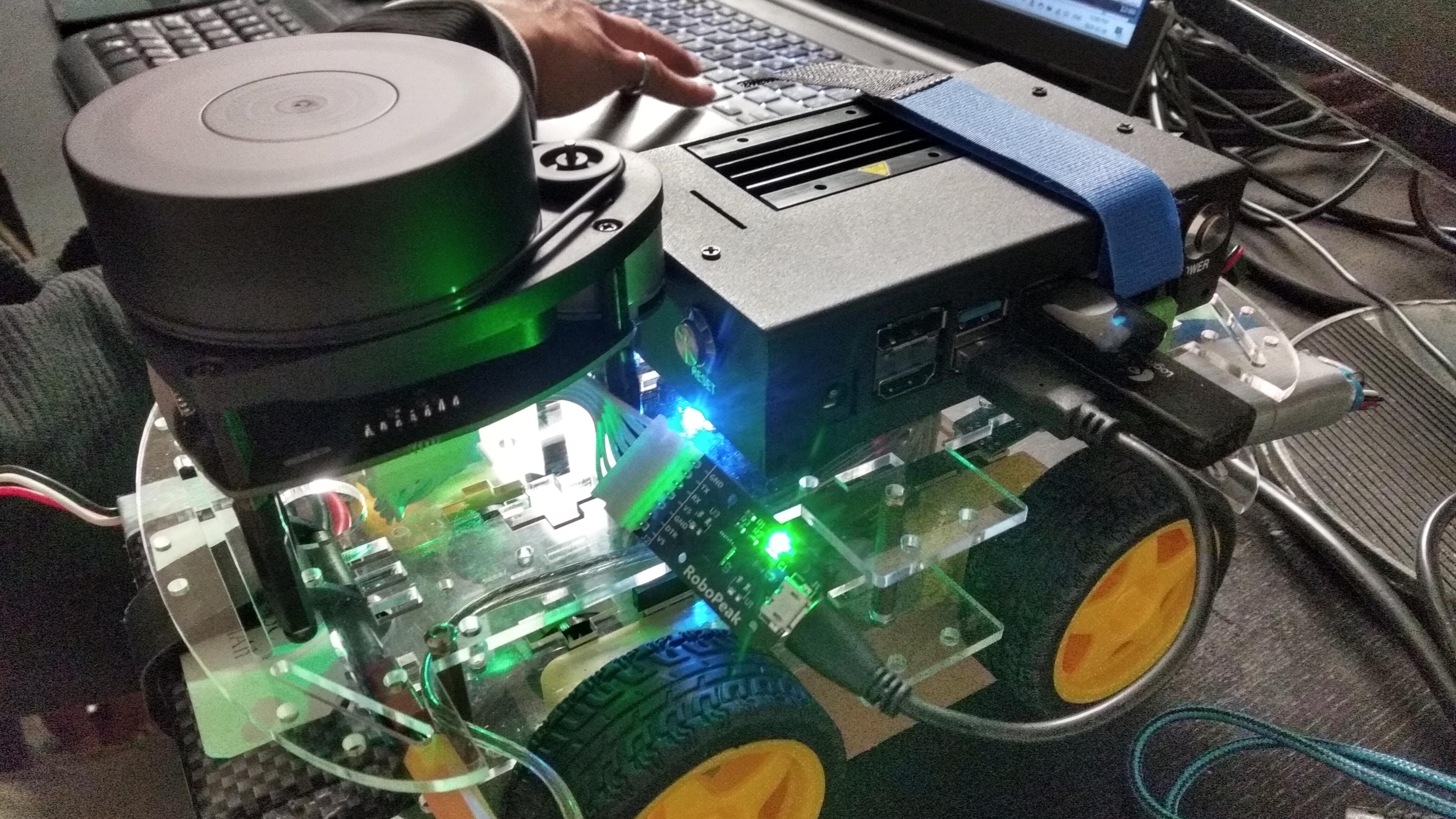
在我們決定花錢建造全尺寸原型之前,我們決定建造一個較小尺寸的概念車來證明我們的想法。我們從鋁型材和六個 9V 直流電機開始,它們的控制方式與上一步中的框圖相同。
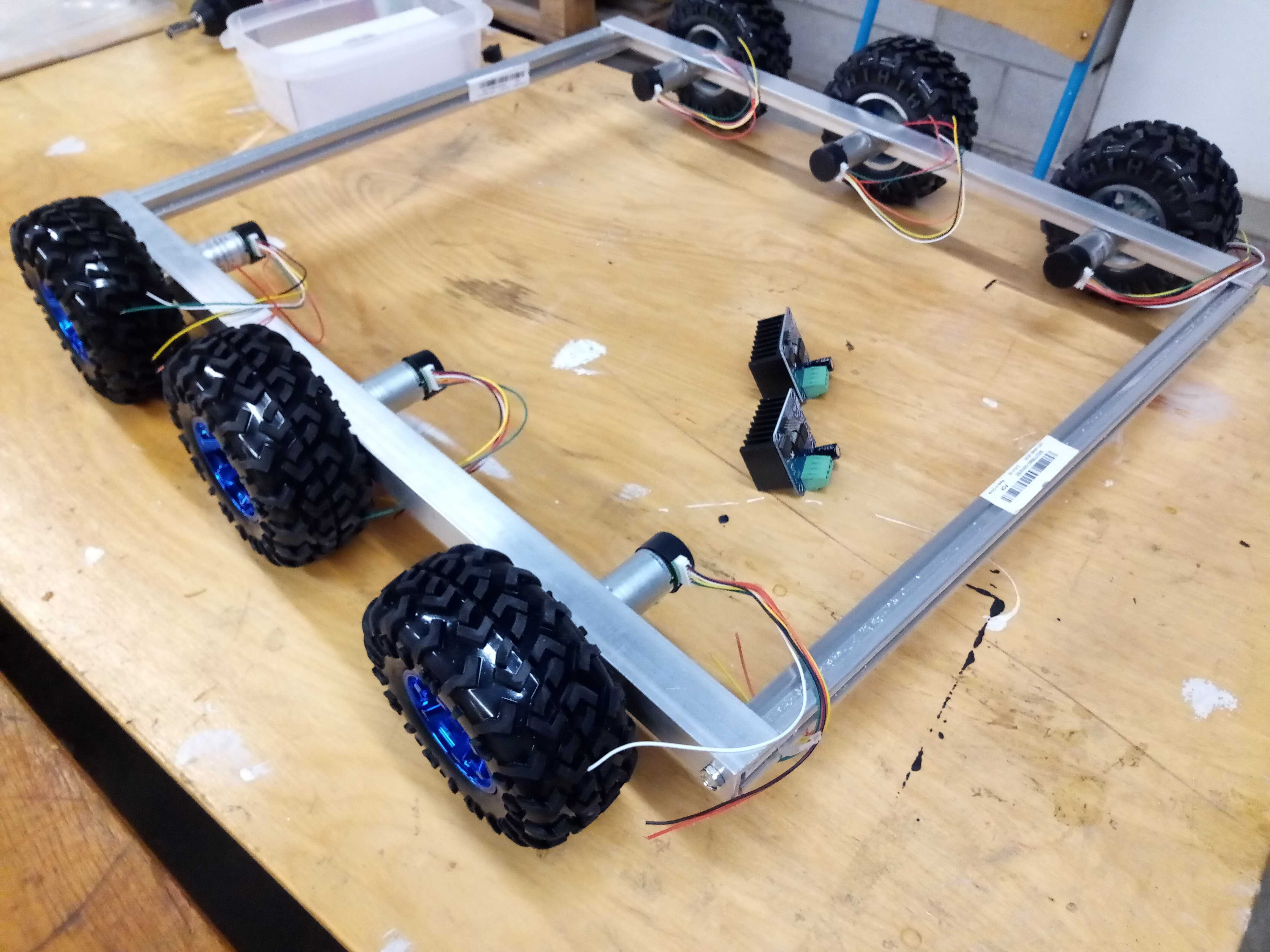
一旦我們向自己證明我們可以在更小的底盤上實現我們的一些項目目標,我們就決定是時候開始構建全尺寸原型了。
第一階段 - 安全
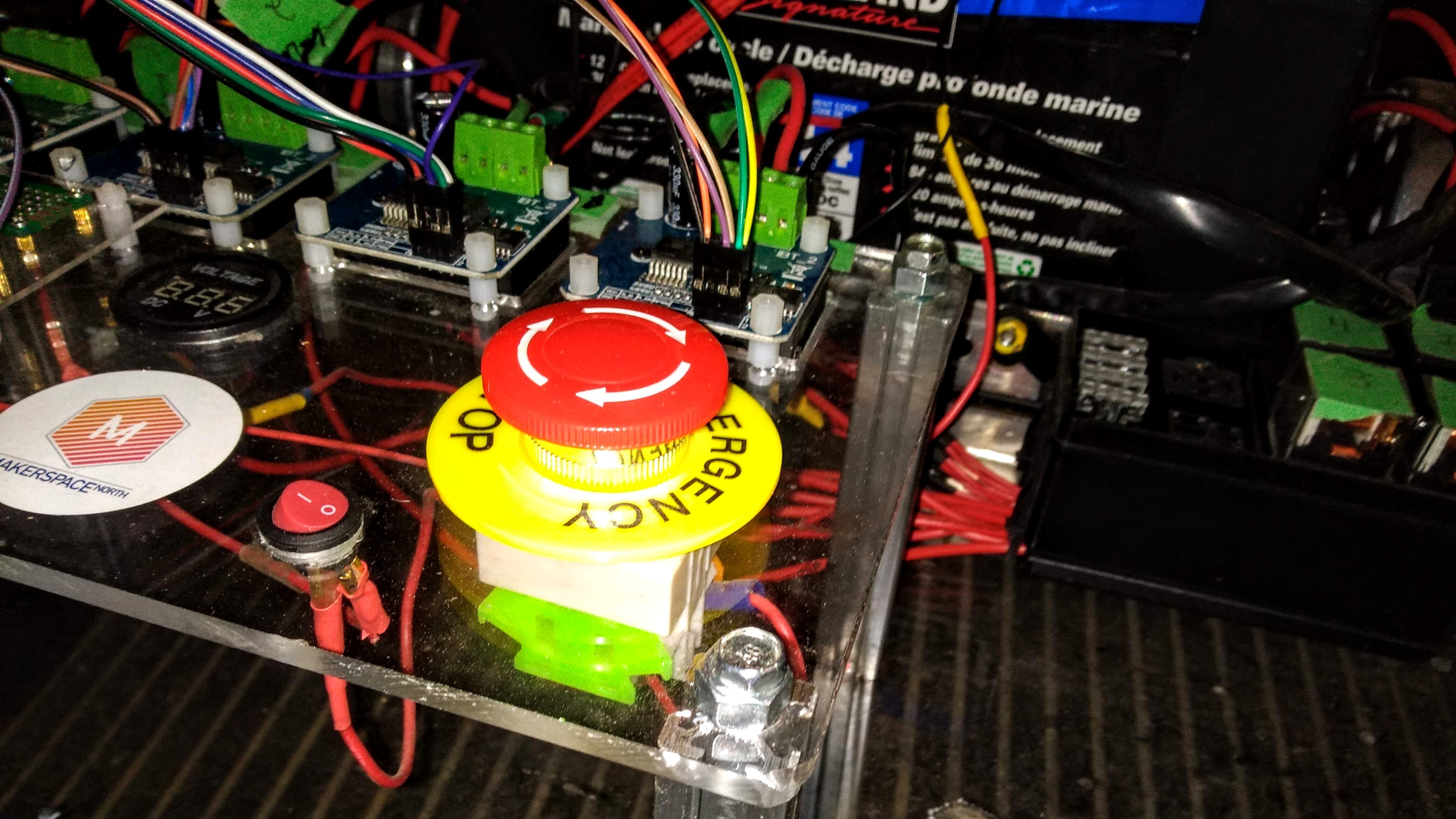
全尺寸掃雪機使用了汽車保險絲盒,這需要斷開急停按鈕才能打開所有繼電器并允許電流從電池流出,并流向電機驅動器和電機(取決于在控制信號上)。
第 2 階段 - 機械設計和組裝
單擊此處查看我們機械材料的完整分類
我們的任務是組裝傳動系統。這需要以機械合理(直輪、平行軸)且易于維修(鏈條可以輕松更換,輪子可以拆卸)的方式完成。我們決定采用四輪驅動系統,配備四個獨立電機。這樣做有幾個原因。首先,全輪驅動是必須的,因為我們需要能夠向地面傳遞盡可能多的力。這是通過最大化與驅動輪上的法向力成比例的摩擦力來實現的。如果只有前兩個或后兩個輪子有動力,那么地面上推雪的力就會更小。其次,我們是不是也想要一個獨立的左右驅動,我們不需要像汽車那樣的帶有扭輪的轉向系統,而是我們有坦克式的轉向,左輪和右輪以相反的方向轉動。只有四個獨立的電機可以實現這些目標,除非我們使用履帶而不是輪胎。
最后,我們將鏈輪安裝在電機和輪軸上,將鏈輪焊接到輪轂上,然后將輪胎安裝在一組板上,該板可以容納輪轂。最初的目的是將鏈輪也焊接到這些輪轂上,然后將板用螺栓固定到鏈輪上。但是,我們生產的焊縫不符合要求,車輪是直的,鏈輪是歪的。我們沒有嘗試再次進行焊接,而是選擇加工定制的鋁制輪轂適配器。這樣可以更輕松地拆卸車輪,并且是購買更多輪轂和鏈輪的低成本解決方案。總而言之,我們的驅動系統實現了它的目標,車輪筆直且同心,我們可以輕松維修鏈條和車輪,并有效地高效地提供動力。

電機將用鏈條連接到輪子上。或者我們可以使用皮帶或齒輪,齒輪很難對齊,而且要復雜得多,它們需要潤滑,間距很重要,它們會產生推力等。選擇鏈條而不是皮帶,因為它們很容易從當地的五金店,而且在設計上比皮帶更靈活,我們可以縮短或延長鏈條。為了提供張力,所使用的軸承安裝在枕塊中。枕塊有槽,可以進行一些調整。此外,我們的電機安裝在我們可以平移的板上,以確保鏈條筆直并調節張力。我們用切槽加工板,這樣我們就可以將電機滑動大約 0.125 英寸,允許在我們 0.5 英寸長的鏈節上進行 0.25 英寸的調整,
第 3 階段 - 電機控制
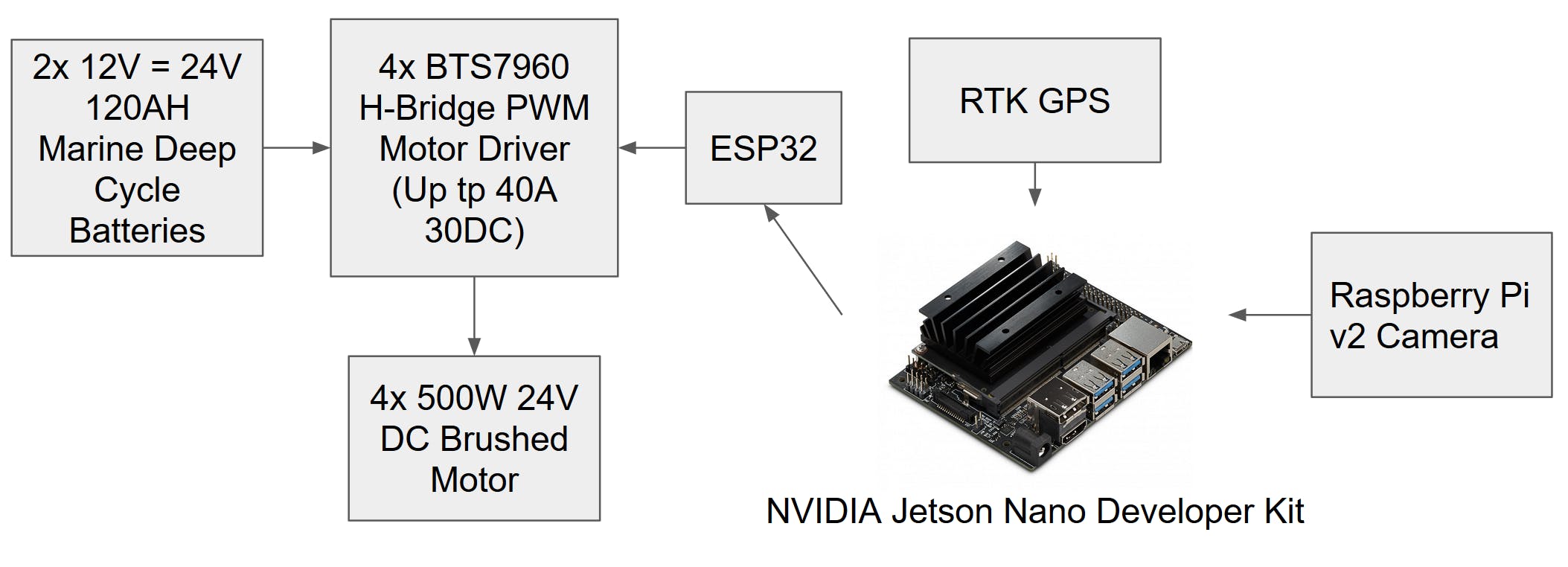
我們選擇使用兩個 12 V 120 Ah 深循環船用電池為掃雪機供電。考慮到沒有重量限制,這些電池是一種理想的具有成本效益的選擇。串聯連接的電池提供 24 V 電壓,最適合為 500 W 24 V 有刷直流電機供電。我們將四個電機驅動器中的每一個分別與兩個電池串聯,從而為每個驅動器提供 24 V 電壓。在連接到驅動器之前,四根正極電纜中的每根電纜首先通過其自身的 25 A 保險絲和繼電器。我們選擇了 25 A 保險絲,因為該電流在 24 V 時會產生 600 W 的功率,假設電機能夠在短時間內提供該功率。四個繼電器連接在一個簡單的串聯電路中,由主開關和一個由其中一個電池供電的緊急停止裝置組成。當兩個開關都閉合時,為四個繼電器中的每一個提供 12 V 電壓,從而打開它們并為每個電機驅動器供電。當緊急停止或主開關打開時,所有繼電器都關閉,驅動器的電源被切斷。每個電機驅動器也連接到各自的電機。每個電機驅動器從電池接收 24 V 電壓,并可以使用該電源驅動電機前進、后退以及以軟件確定的不同速度。每個電機驅動器均由來自 ESP32 的信號控制。ESP32 由 5 V 供電,我們使用連接到 12 V 電池之一的 5 V 降壓轉換器實現了這一點。為 ESP32 供電的電路也與主開關串聯,因此當主開關打開時 ESP32 關閉。從而打開它們并為每個電機驅動器供電。當緊急停止或主開關打開時,所有繼電器都關閉,驅動器的電源被切斷。每個電機驅動器也連接到各自的電機。每個電機驅動器從電池接收 24 V 電壓,并可以使用該電源驅動電機前進、后退以及以軟件確定的不同速度。每個電機驅動器均由來自 ESP32 的信號控制。ESP32 由 5 V 供電,我們使用連接到 12 V 電池之一的 5 V 降壓轉換器實現了這一點。為 ESP32 供電的電路也與主開關串聯,因此當主開關打開時 ESP32 關閉。從而打開它們并為每個電機驅動器供電。當緊急停止或主開關打開時,所有繼電器都關閉,驅動器的電源被切斷。每個電機驅動器也連接到各自的電機。每個電機驅動器從電池接收 24 V 電壓,并可以使用該電源驅動電機前進、后退以及以軟件確定的不同速度。每個電機驅動器均由來自 ESP32 的信號控制。ESP32 由 5 V 供電,我們使用連接到 12 V 電池之一的 5 V 降壓轉換器實現了這一點。為 ESP32 供電的電路也與主開關串聯,因此當主開關打開時 ESP32 關閉。當緊急停止或主開關打開時,所有繼電器都關閉,驅動器的電源被切斷。每個電機驅動器也連接到各自的電機。每個電機驅動器從電池接收 24 V 電壓,并可以使用該電源驅動電機前進、后退以及以軟件確定的不同速度。每個電機驅動器均由來自 ESP32 的信號控制。ESP32 由 5 V 供電,我們使用連接到 12 V 電池之一的 5 V 降壓轉換器實現了這一點。為 ESP32 供電的電路也與主開關串聯,因此當主開關打開時 ESP32 關閉。當緊急停止或主開關打開時,所有繼電器都關閉,驅動器的電源被切斷。每個電機驅動器也連接到各自的電機。每個電機驅動器從電池接收 24 V 電壓,并可以使用該電源驅動電機前進、后退以及以軟件確定的不同速度。每個電機驅動器均由來自 ESP32 的信號控制。ESP32 由 5 V 供電,我們使用連接到 12 V 電池之一的 5 V 降壓轉換器實現了這一點。為 ESP32 供電的電路也與主開關串聯,因此當主開關打開時 ESP32 關閉。每個電機驅動器從電池接收 24 V 電壓,并可以使用該電源驅動電機前進、后退以及以軟件確定的不同速度。每個電機驅動器均由來自 ESP32 的信號控制。ESP32 由 5 V 供電,我們使用連接到 12 V 電池之一的 5 V 降壓轉換器實現了這一點。為 ESP32 供電的電路也與主開關串聯,因此當主開關打開時 ESP32 關閉。每個電機驅動器從電池接收 24 V 電壓,并可以使用該電源驅動電機前進、后退以及以軟件確定的不同速度。每個電機驅動器均由來自 ESP32 的信號控制。ESP32 由 5 V 供電,我們使用連接到 12 V 電池之一的 5 V 降壓轉換器實現了這一點。為 ESP32 供電的電路也與主開關串聯,因此當主開關打開時 ESP32 關閉。
與制造機械部件所涉及的問題相比,構建電氣系統時遇到的問題微乎其微。內置電壓表在測試電氣系統時會提前停止工作,但這個組件不是必需的,因為我們可以使用手頭的電壓表測試電壓。最主要的問題是一些安裝的電機驅動器有故障,但通過一些故障排除和更換壞驅動器解決了這個問題。
電氣系統的下一步主要是簡化所有電纜并為其增加保護。在目前的狀態下,掃雪機使用了過多的電纜,并且這些電纜的安裝方式沒有組織。串聯電池的多根跨接電纜可以換成一根合適的跨接電纜,并且可以焊接所有連接器以確保可靠連接。連接到電池的眾多跳線也可以與單個高規格跳線交換,并且塊連接器可用于在需要分配電源的點將它們分成更小的電纜。任何捆綁的電線都可以用套管包裹以確保使用壽命。各個電機驅動器也可以直接重新連接到 ESP32,而不是通過中間板。
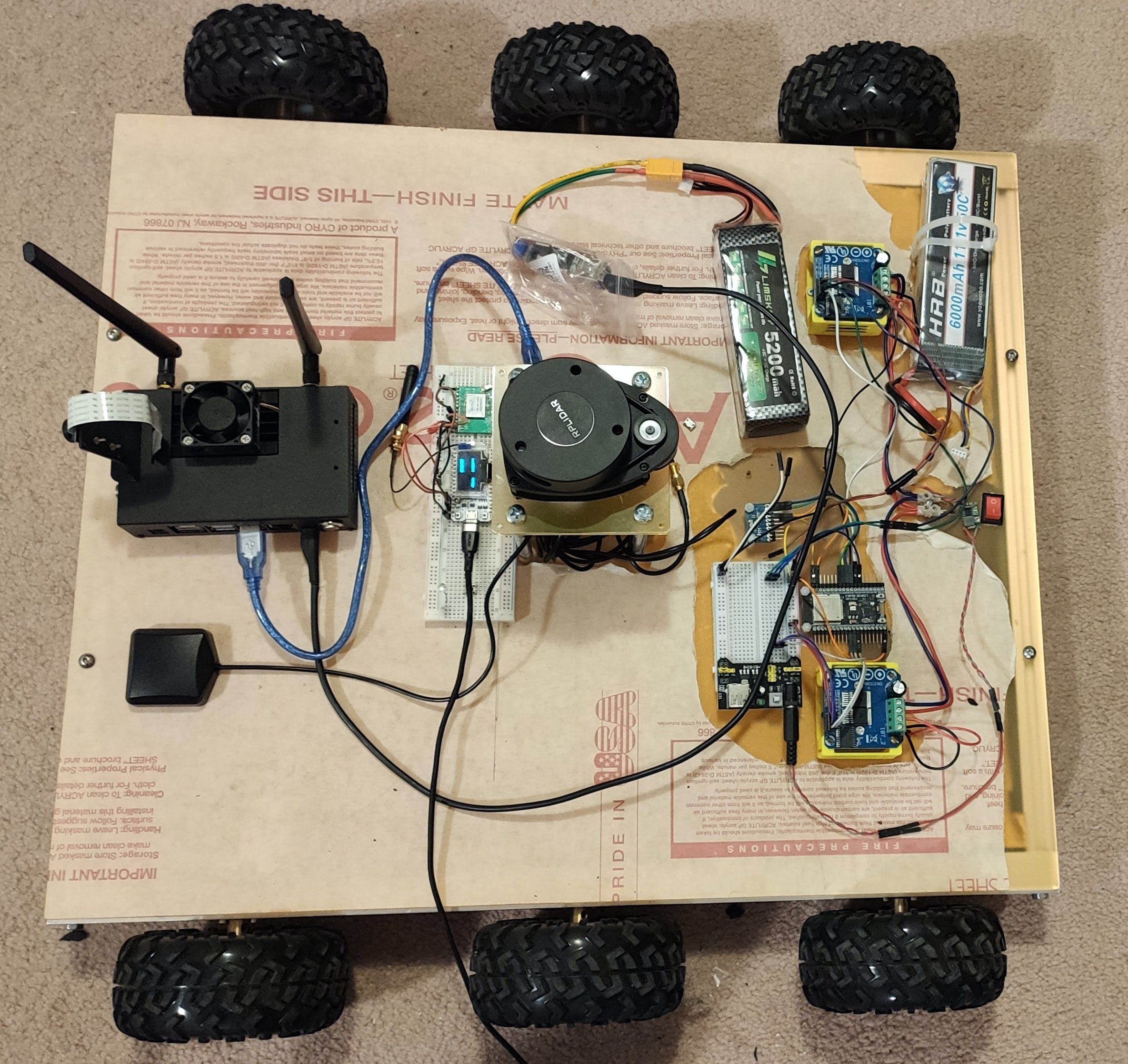
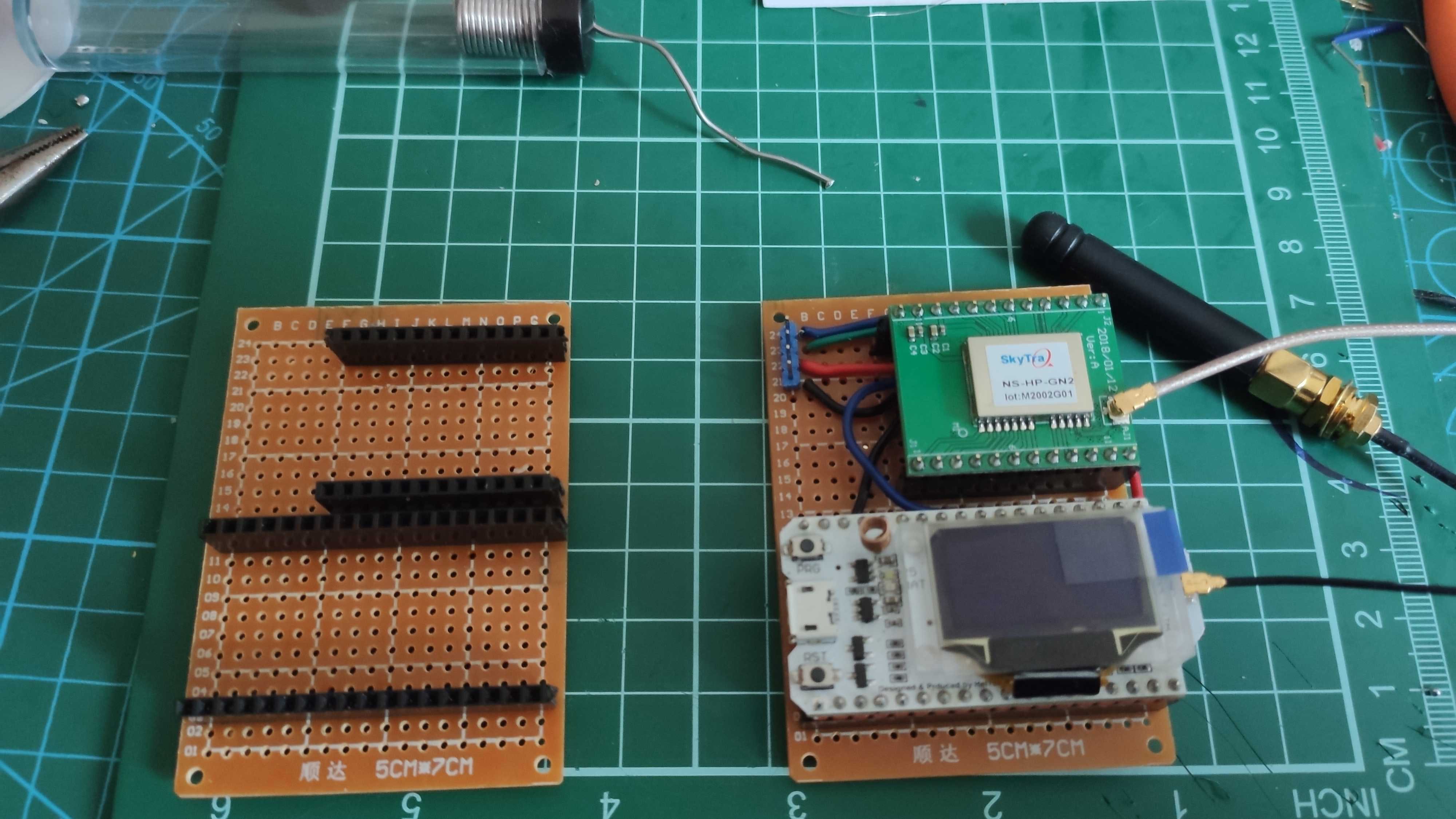
第 4 階段-同時定位和路徑導航
我們使用了來自 NavSpark NS-HP-GN2的最新雙頻(或多波段)RTK ,它支持 GPS L1/L2C、北斗 B1I/B2I、Galileo E1/E5b、GLONASS L1/L2。更多的衛星 = 更高的準確性和對信號阻塞的更大容忍度。我們使用 2 個Heltec Lora 32在基站和掃雪機中的 GPS 接收器之間進行糾錯通信。我們在北美使用LoRa (遠程)915Mhz 版本。LoRaWAN 非常適合開放空間和 Wi-Fi 或蜂窩網絡未覆蓋的區域。它可以超過30公里的范圍。但是,它的主要不便在于它具有 27 kbps 的低數據傳輸限制。我們需要將通信波特率降低到 19200。RTK 接收器可以毫無問題地發送 10Hz 的糾錯信號。NMEAnd RTCM只需要 9600 波特。Heltec Lora32 具有 Wi-Fi 和 LoRaWAN 兩種通信方式。我們可以根據操作區域進行配置。
RTK 解決方案(差分 GPS)已在測量領域使用多年;但是,此類系統的成本通常非常高(在 5 位數范圍內)。我們今天實施的系統采用市場上最新的經濟高效技術,基站和 Rover(掃雪機)的價格僅為 300 美元。
?
- 自動燈開關開源構建
- 儀器手套開源構建
- 蛋打開源構建
- 護眼套裝開源構建
- 西蒙小游戲開源構建
- 自動理療機開源構建
- 火焰燈開源構建
- 免觸摸開關開源構建
- 自主種子種植系統開源分享
- 使用Launchpad和Energia構建的開源項目
- 教育收音機開源構建
- 自主系統開源分享
- Grindbit的構建開源項目
- 《單片機原理及應用》課程設計的構建與實踐
- 基于PC機的自主管理模型
- PyTorch神經網絡模型構建過程 276次閱讀
- 基于CW32單片機做的軟硬件開源項目 893次閱讀
- 推薦GitHub上與嵌入式相關的高星開源項目 967次閱讀
- 清華等開源「工具學習基準」ToolBench,微調模型ToolLLaMA性能超越ChatGPT 481次閱讀
- 使用Ansible構建虛擬機部署Linux的最佳實踐 956次閱讀
- 前沿開源技術領域的開源大數據一一解讀 1006次閱讀
- 如何構建基于狀態機的軟件系統 1420次閱讀
- 尋找開源硬件成功的觸發器 636次閱讀
- RT-Thread 4.1.0的CMake構建教程 3129次閱讀
- 如何使用DonkeyCar平臺構建一個自主機器人 2114次閱讀
- 構建開源芯片生態需要什么要的 4327次閱讀
- 無人機系統如何實現自主性 4100次閱讀
- NASA的開源軟件是什么?NASA的開源軟件的詳細分析 7188次閱讀
- Jenkins詳細安裝與構建部署使用教程 1702次閱讀
- 眾核多計算模式系統的構建 3844次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數據手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網監
工商網監
評論