 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
靈感
從一開始,我就知道我需要在我的項目中加入一個復古玩具。
第一步
收到我自己的留聲機后,我拿起隨附的公對公 3.5 毫米音頻線(以及三節不隨附的 AA 電池),用一只手將電線握在一起,另一只手將手寫筆固定在鍵盤上,從而確定輸出信號的范圍.
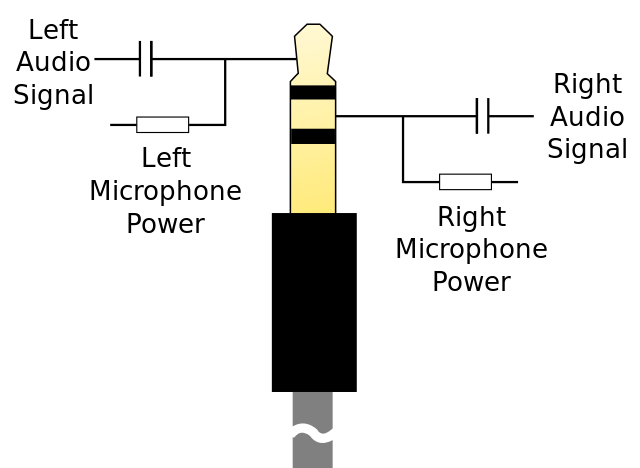
由于留聲機輸出的是單聲道信號,因此我使用筆尖 (T) 作為輸入,使用套管 (S) 作為接地(順便說一下,R?? 代表環)。
基本的留聲機有一個用于 3 種聲音模式的開關、一個顫音開關、一個電源開關、一個音量旋鈕和一個調諧旋鈕。我建議在最大音量和無顫音下使用配置文件 1,下面的所有結果都使用這些設置。調準時,留聲機的最低音符是 A (110Hz),最高音符是 E (329.63 Hz)。當留聲機開啟時(可以說是“預熱”),留聲機的輸出最小電壓范圍為 -1.7 V 至 -100 mV,峰值電壓范圍為 1.7 V 至 3.5 V。自 TI MSP430G2553無法讀取負電壓,如果您移動參考電壓,Uno 只能讀取負電壓,我決定使用 TI LM741 運算放大器構建增益和轉換電路。
電路
可以構建一個簡單的電路,將 [-2, 2] V 轉換為 [0, 4[ V 并應用增益以獲得輸出 [0, 3] V。
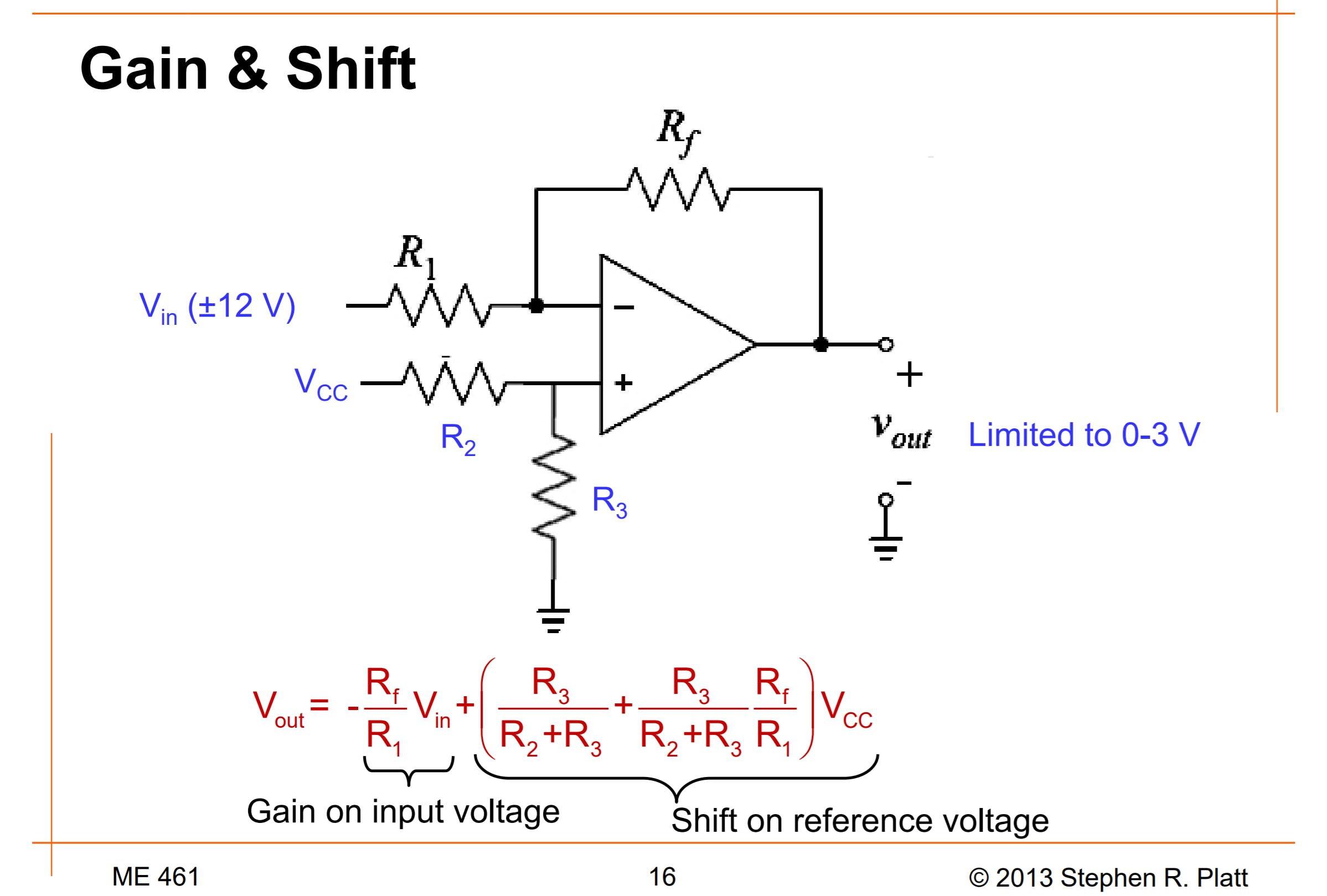
可以使用來自 MSP430G2553 的 3.3V 電源和一個 10k 電位器來控制同相輸入。圖中的 R1 和 Rf 選擇為 9.1 kOhm 和 12 kOhm,以實現 9.1k/12k ? 3/4 增益。還選擇了較大的電阻器來限制電流量。考慮到這一點,我在 LTSpice(您可以在此處免費下載)中設計和仿真電路。
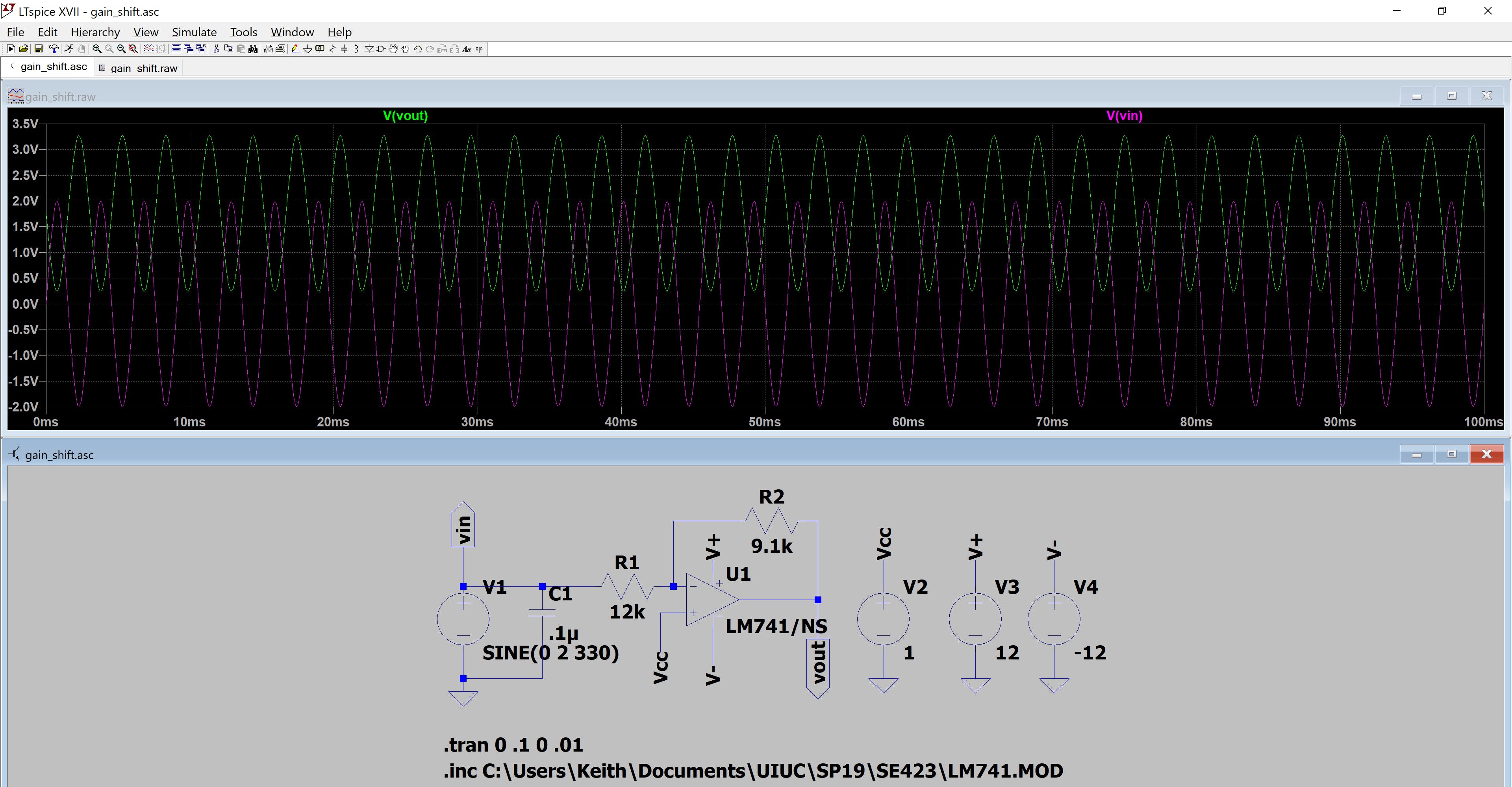
幸運的是,TI 為他們的許多部件提供了 SPICE 模型,這樣的精確仿真是可能的。(您可以在此處下載 LM741.mod )。模擬給出了從 [-2, 2] V 到 [0, 3.3] V 的預期偏移,所以是時候構建電路了!
構建電路
電路中使用的唯一部件是一個 9.1k 和 12k 歐姆電阻器、一個 0.1μ 法拉電容器、一個 10k 電位器、TI LM741、一個 3.5mm 音頻插孔和一些電線。
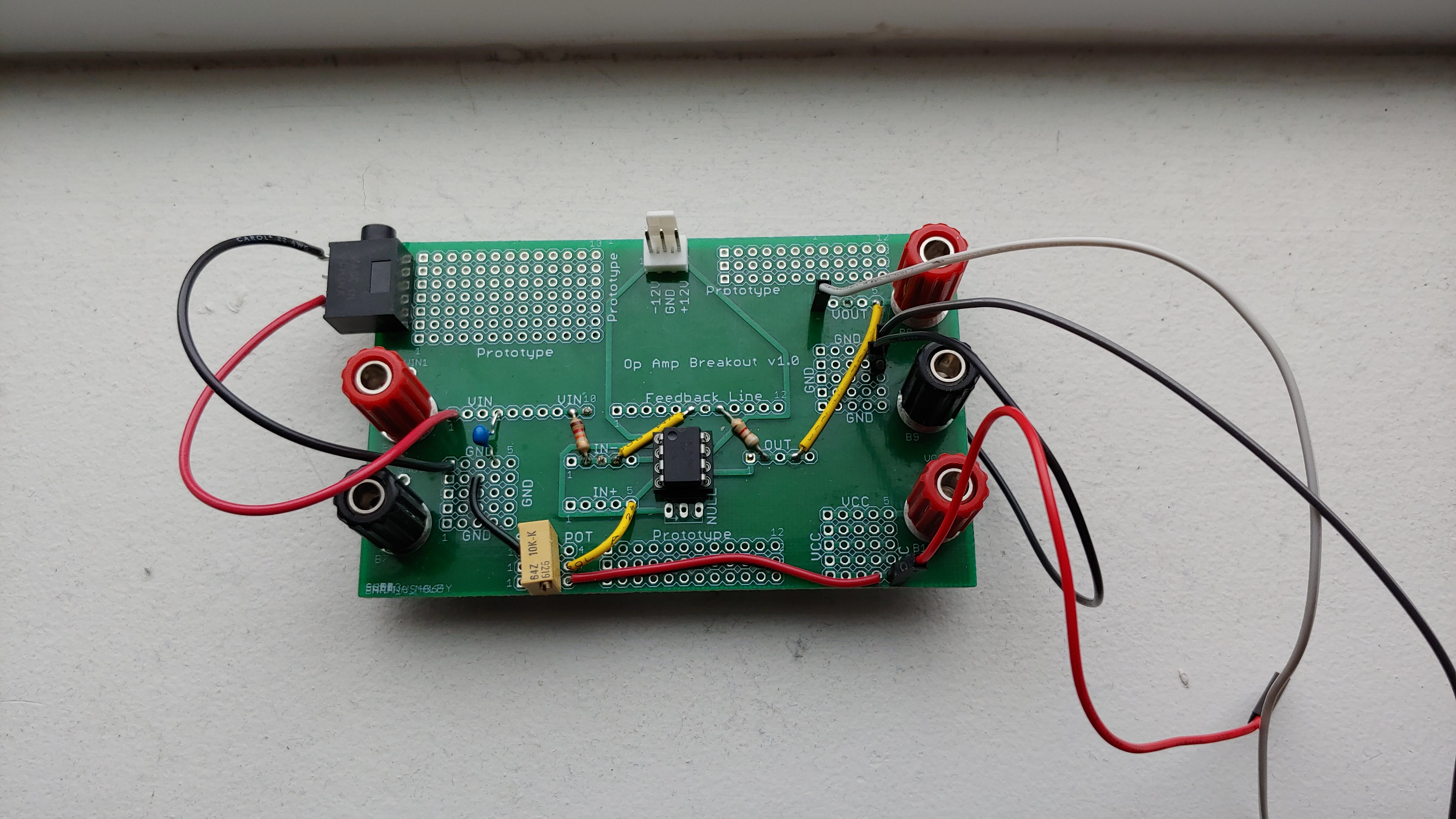
焊接電路后,使用 +12/-12 V 直流電源和 MSP430G2553 的 3.3 V 電壓為其供電。從函數發生器提供 4 V 峰峰值的輸入正弦波產生了我想要看到的結果。
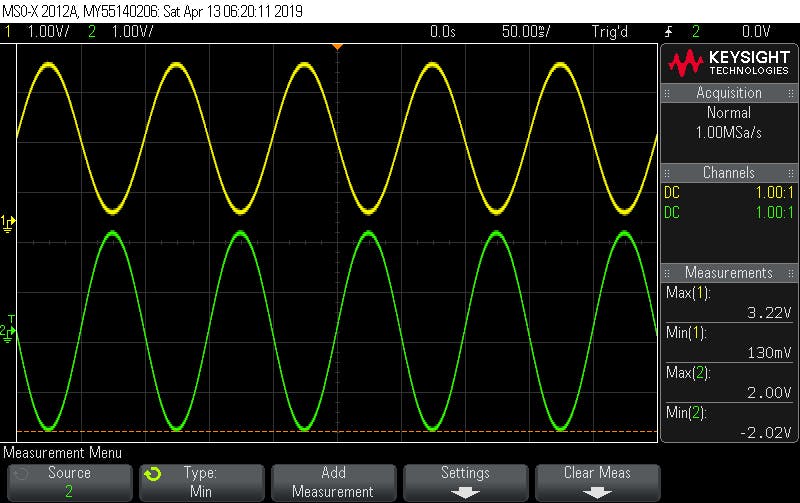
現在提供來自留聲機的輸入并調整電位器偏移...
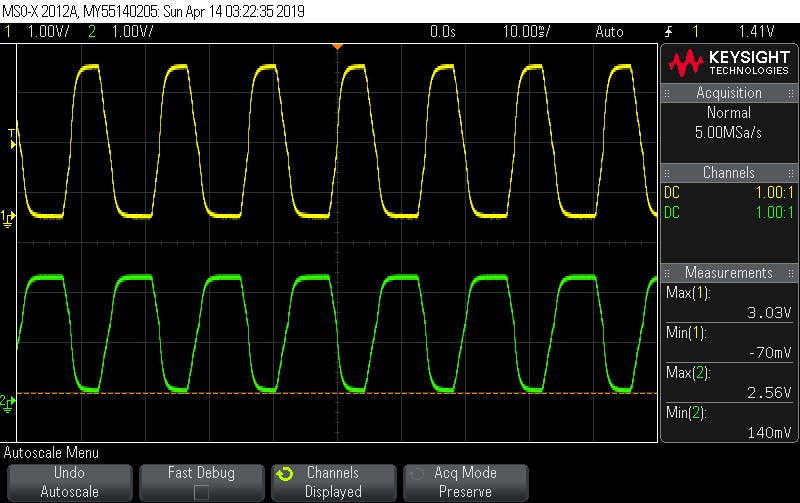
?
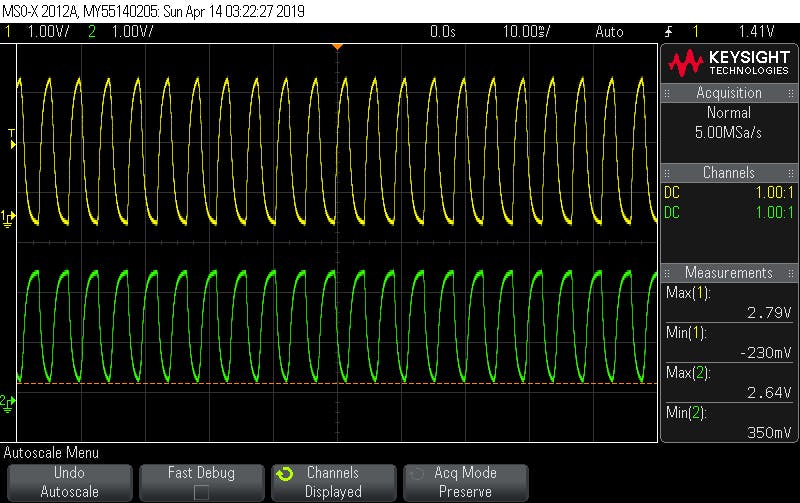
您會注意到,根據定義,高音 (E 329.63 Hz) 比低音 (A 110 Hz) 緊湊得多。這會產生采樣問題,稍后將對此進行解釋。
MSP430G2553(主控)
MSP4302553的作用是對音頻信號進行采樣,發送給arduino,根據接收到的信息,驅動舵機。ADC10 和定時器 A0 設置為以 8kHz 采樣。
// Init ADC10
// Control Register 0
ADC10CTL0 = SREF_0; // Vr+ = Vcc and Vr- = Vss (default)
ADC10CTL0 += ADC10SHT_1; // 8 X ADC10CLKs
// ADC10SR: 2000 ksps (default)
// REFOUT: reference output off (default)
// REFBURST: continuous (default)
// MSC: single conversion mode (default)
// REFON: reference generator off (default)
ADC10CTL0 += ADC10ON; // ADC10 On
ADC10CTL0 += ADC10IE; // interrupt enabled
// Control Register 1
ADC10CTL1 = INCH_3; //input channel A3 (default)
ADC10CTL1 += SHS_0; // sample and hold source ADC10SC (default)
// ADC10DF: straight binary data format (default)
ADC10CTL1 += ADC10DIV_0; // Clock divider, try values and check noise
ADC10CTL1 += ADC10SSEL_0; // clock source ADC10SC
ADC10CTL1 += CONSEQ_0; // Single channel single conversion
// analog enable control register 0
ADC10AE0 = 8; // Enable A3 as ADC channel
引腳 1.4(任意)成為從機選擇并初始化 SPI
// Initialize Port 1, P1.0 LED, P1.4 SS
P1SEL &= ~(BIT0 + BIT4); // P1.0 and P1.4 GPIO
P1SEL &= ~(BIT0 + BIT4); // P1.0 and P1.4 GPIO
P1REN &= ~(BIT0 + BIT4); // P1.0 and P1.4 Resistor disabled
P1DIR |= BIT0 + BIT4; // Set P1.0 and P1.4 to output direction
P1OUT &= BIT4; // Initially set P1.4/SS high
// Port 1 SPI pins, P1.5 SCLK, P1.6 MISO, P1.7 MOSI
P1SEL |= BIT5 + BIT7 + BIT6; // Secondary Peripheral Module Function for P1.5-1.7
P1SEL2 |= BIT5 + BIT7 + BIT6; // Secondary Peripheral Module Function for P1.5-1.7
// Polarity and SCLK for SPI
UCB0CTL0 = UCCKPH + UCCKPL; // first edge: data capture, following edge: data update , SCLK inactive state High
// Initialize SPI
UCB0CTL0 |= UCMSB + UCMST + UCSYNC + UCMODE_0; // MSB first, master, 3-pin, 8-bit synchronous
UCB0CTL1 = UCSSEL_2 + UCSWRST; // SMCLK, enable SW Reset
// bit rate: SMCLK/x=SCLK
// smclk same as arduino uno (16 Mhz)
UCB0BR0 = 32; // low byte, divide by
// 4 divider or greater, 8 and 16 causes issues, 32 seems okay
UCB0BR1 = 0; // same as 1 divider, high byte
UCB0CTL1 &= ~UCSWRST; // **Initialize USCI state machine**
IFG2 &= ~UCB0RXIE; // Clear RX interrupt flag in case it was set during init
IE2 |= UCB0RXIE; // Enable USCI0 RX interrupt
端口 2 設置為使用 TA1 和 TA2 引腳創建 PWM 信號來控制伺服系統。
// Init Port 2
// setup P2.1 with Timer1_A3.TA1 and P2.4 with Timer1_A3.TA2
P2DIR |= 0x12;
P2SEL |= 0x12;
P2SEL2 = 0;
退一步,讓我們談談 SPI。
接口接口
它有很多內容,但歸根結底是摩托羅拉在 1980 年代創建的通信接口規范,可用作雙向通道。主機 (MSP430G2553) 和從機 (Uno) 需要共享四條主要線路:SCLK、MISO、MOSI 和 SS。SCLK(串行時鐘)由主機生成,以便通信保持同步。MISO(Master In Slave Out)和 MOSI(Master Out Slave In 是街道的兩側,指示交通行駛的方向(有時稱為 SOMI 和 SIMO)。SS(Slave Select)告訴從站何時應該收聽master, 以及何時忽略它。這允許一個 master 擁有多個 slaves 而不會導致通信錯誤。配置 SPI 有不同的方法,但我選擇的設置(如上面代碼中指定的)看起來像這樣。
?
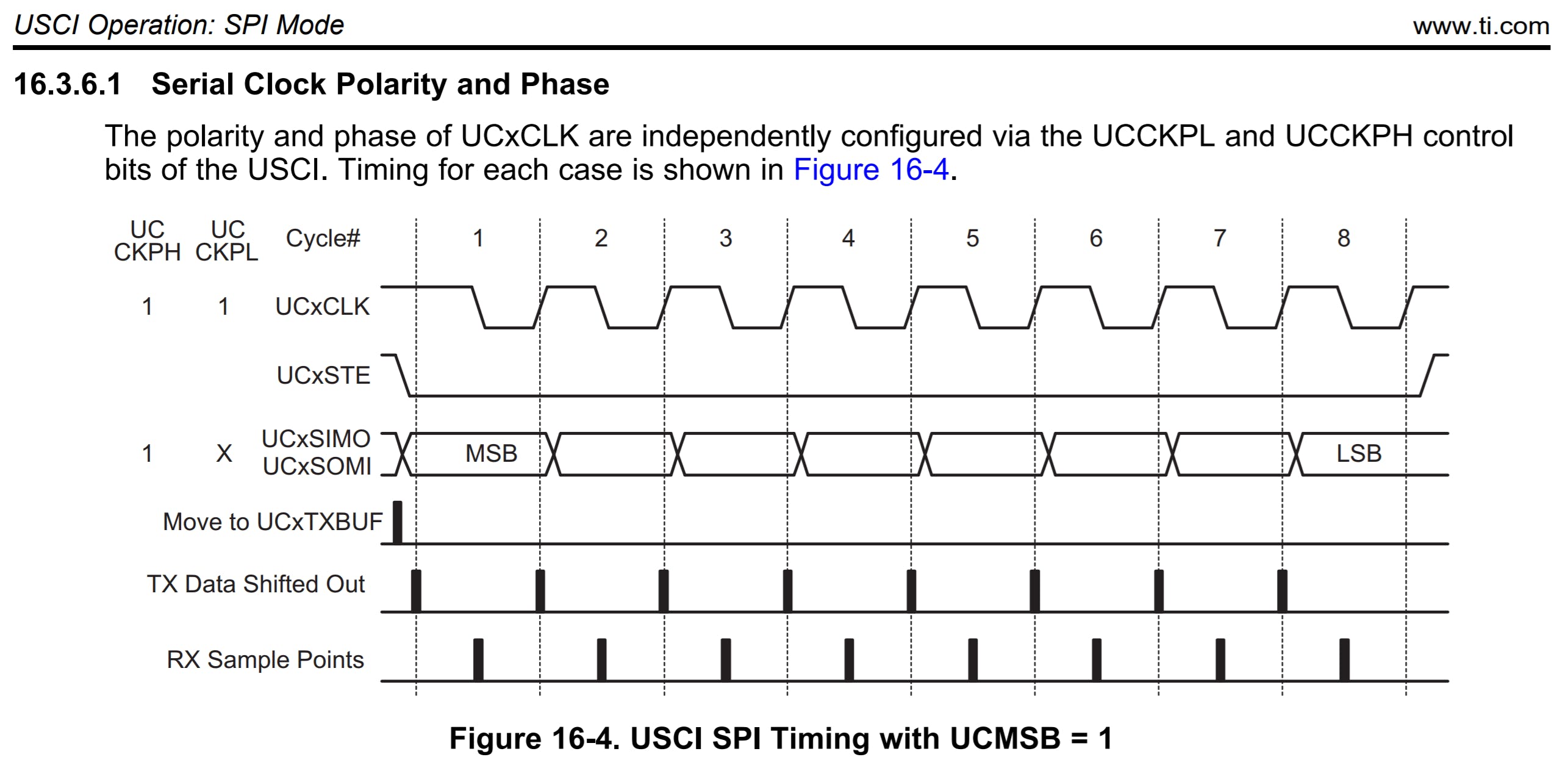
該圖可在 MSP430x2xx 系列用戶指南的第 448 頁找到。
Arduino Uno(奴隸)
Arduino 證明了一個使 SPI 通信變得容易的庫,但只是為了讓 Arduino 成為主人(去圖)。
pinMode(MISO, OUTPUT);
// turn on SPI with interrupts, slave mode, msbit first
// clock idle when high, sample on falling edge of clock
SPCR = _BV(SPE) + _BV(SPIE) + _BV(CPOL) +_BV(CPHA);
/*
* SPIE - Enables the SPI interrupt when 1
* SPE - Enables the SPI when 1
* DORD - Sends data least Significant Bit First when 1, most Significant Bit first when 0
* MSTR - Sets the Arduino in master mode when 1, slave mode when 0
* CPOL - Sets the data clock to be idle when high if set to 1, idle when low if set to 0
* CPHA - Samples data on the falling edge of the data clock when 1, rising edge when 0
* SPR1 and SPR0 - Sets the SPI speed, 00 is fastest (4MHz) 11 is slowest (250KHz)
*
*/
設置只需要兩行代碼,但通信中的大部分困難在于讓 Uno 作為奴隸合作。Uno 和 MSP430G2553 均以 16Mhz 運行,但 MSP430G2553 可以通過使用較小的分頻器 (UCB0BRx) 設置波特率控制寄存器來更快地通過 SPI 進行通信。Uno 至少需要一個 4 分頻器 (4 Mhz),但我發現偶爾會出現錯誤傳輸(0x1234 變為 0x3400),直到 32 分頻器 (500 kHz)。我選擇將 MSP430G2553 作為主器件的原因之一是 ADC 采用 10 位樣本,而 Uno 只能采用 8 位樣本。這里越多越好,因為它提供了更高的分辨率,這意味著 MSP430G2553 可能能夠看到 1 mV 的差異,而 Uno 可能看不到。雖然這兩個設備之間的 SPI 一次發送 8 位,可以簡單地發送 2 組 8 位來獲取 MSP430G2553 的 10 位值。唯一的問題是確保較慢的 Arduino 不會落后。
剩下的貓頭鷹
最初的目的是在 Uno 上使用 FFT 或音調檢測庫,但這只會讓事情變得更慢。最終,由于我知道來自留聲機的信號的形狀(每個周期一個上升沿和一個下降沿),所以我采用了一種更簡單、更快速的方法。當前一個平均值小于閾值時,我只是等待最后 4 個樣本的平均值大于閾值。這告訴我我觸發了上升沿。然后我數了多久,直到再次發生這種情況并存儲起來。然后我會簡單地取最后 10 個計數/周期的中值來過濾掉任何異常值。這會瞬間發生,并允許伺服系統實時做出反應。
只需更改 MSP430G2553 上 PWM 信號的占空比即可移動伺服器。例如:
TA1CCR2 = 2100; TA1CCR1 = 2100;
最后的想法
我可能會嘗試改進代碼,以便稍后伺服在高頻下更加穩定。
- 交流永磁伺服系統的控制策略 9次下載
- 交流永磁伺服系統的控制策略 21次下載
- 交流永磁伺服系統的控制策略 10次下載
- 交流永磁伺服系統的控制策略 18次下載
- 交流永磁伺服系統的控制策略 10次下載
- 伺服系統的組成 19次下載
- 基于SVPWM的PMSM矢量控制伺服系統研究 23次下載
- 轉臺伺服系統模糊PID復合控制算法 15次下載
- 音圈電機伺服系統模糊PID控制 18次下載
- 基于DSP的電機伺服系統中的模糊PID控制 26次下載
- 伺服系統的PID控制技術下載 8次下載
- 伺服系統的PID控制
- 伺服系統的扭矩控制(Toque Control)和速度控制(
- 進給伺服系統 0次下載
- 數控機床的伺服系統
- 伺服系統與步進系統的區別 579次閱讀
- 伺服系統的結構組成及應用場景 623次閱讀
- 液壓伺服系統的類型和應用 823次閱讀
- 什么是伺服系統?伺服系統的分類、組成及特點 2774次閱讀
- 伺服系統調試步驟 6339次閱讀
- 伺服系統設計驗證流程解決方案 1072次閱讀
- 伺服系統復合控制技術和非線性補償技術 4295次閱讀
- PLC控制伺服系統步驟_西門子PLC控制的伺服控制系統詳解 5.2w次閱讀
- 伺服系統應用于哪兒_伺服系統應用實例 1.6w次閱讀
- 現代交流伺服系統原理及控制方法 6518次閱讀
- 伺服系統什么意思_伺服系統的作用是什么 3.3w次閱讀
- 伺服系統是什么_伺服系統的基本要求_伺服系統的基本組成 1.8w次閱讀
- 什么是伺服系統,步進電機和伺服電機的區別 1.2w次閱讀
- 伺服系統淺析,伺服系統的分類、結構組成與技術要求 8176次閱讀
- 步進電機開環伺服系統解析,開環步進伺服系統的工作原理 1.6w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數據手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網監
工商網監
評論