 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問(wèn)
提問(wèn)  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
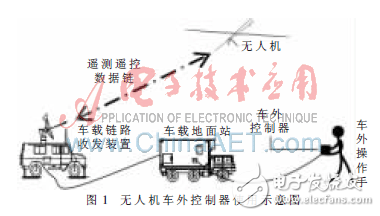
無(wú)人機(jī)是一種有動(dòng)力、可控制、能承載多種任務(wù)設(shè)備、執(zhí)行多種作戰(zhàn)任務(wù)并可重復(fù)使用的戰(zhàn)術(shù)飛行器,其零傷亡風(fēng)險(xiǎn)和高機(jī)動(dòng)性等優(yōu)勢(shì)引起了各國(guó)軍方的高度重視。無(wú)人機(jī)飛行過(guò)程可簡(jiǎn)單劃分為起飛、高空飛行和降落三部分。高空飛行階段飛行環(huán)境相對(duì)穩(wěn)定,常采用無(wú)人機(jī)自主飛行方式,無(wú)需對(duì)其飛行姿態(tài)做太多人為干預(yù)。但是在起飛和降落階段無(wú)人機(jī)的速度變化大,姿態(tài)調(diào)整頻繁,起降場(chǎng)地地形、氣候等諸多復(fù)雜因素對(duì)無(wú)人機(jī)的安全造成巨大威脅,是無(wú)人機(jī)實(shí)驗(yàn)任務(wù)飛行中的事故多發(fā)時(shí)段,因此在起降階段進(jìn)行即時(shí)、準(zhǔn)確的人為調(diào)整是保障無(wú)人機(jī)飛行安全的重要手段。現(xiàn)階段部分無(wú)人機(jī)型號(hào)采用有線的車(chē)載地面站外部(車(chē)外)控制器方式,讓地面操作人員通過(guò)近距離觀察無(wú)人機(jī)的姿態(tài)來(lái)實(shí)時(shí)遙控?zé)o人機(jī)。
無(wú)人機(jī)車(chē)外控制器使用示意圖見(jiàn)圖1。
國(guó)內(nèi)車(chē)外控制器設(shè)計(jì)研制之初考慮到地面站內(nèi)人員和車(chē)外人員的交流,加入了語(yǔ)音通信功能,但開(kāi)始只是應(yīng)用對(duì)講機(jī)進(jìn)行通話,而對(duì)講機(jī)是單工通信機(jī)制,通話時(shí)易形成競(jìng)爭(zhēng);后來(lái)部分單位在有線車(chē)外控制器的信號(hào)傳輸線纜上增加了模擬語(yǔ)音,實(shí)現(xiàn)了車(chē)內(nèi)測(cè)控臺(tái)和車(chē)外控制人員的雙工通信,而模擬語(yǔ)音容易自激,通話易受干擾[1]。
基于已有無(wú)人機(jī)系統(tǒng)的應(yīng)用經(jīng)驗(yàn),設(shè)計(jì)了一種數(shù)字語(yǔ)音和遙控?cái)?shù)據(jù)共同傳輸?shù)男滦蜔o(wú)人機(jī)車(chē)外控制器。本文將對(duì)其設(shè)計(jì)組成、尤其是數(shù)話同傳技術(shù)的實(shí)現(xiàn)方法進(jìn)行詳細(xì)說(shuō)明,最后對(duì)其測(cè)試和應(yīng)用環(huán)境進(jìn)行介紹。
1 車(chē)外控制器的設(shè)計(jì)組成
1.1 系統(tǒng)設(shè)計(jì)組成
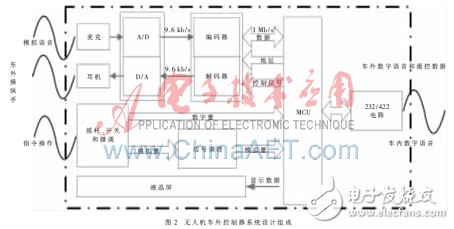
無(wú)人機(jī)車(chē)外控制器系統(tǒng)設(shè)計(jì)組成見(jiàn)圖2。
(1)車(chē)外控制器遙控?cái)?shù)據(jù)的產(chǎn)生和采集
通過(guò)車(chē)外操縱手對(duì)車(chē)外控制器各機(jī)構(gòu)(搖桿、開(kāi)關(guān)和微調(diào))的操縱,引起內(nèi)部電位器和電開(kāi)關(guān)變化進(jìn)而引起電信號(hào)的變化。變化的電壓通過(guò)信號(hào)調(diào)理電路發(fā)送到微處理器(MCU),由MCU內(nèi)部的AD模塊進(jìn)行處理;變化的數(shù)字量直接輸入到MCU。MCU把當(dāng)前的遙控?cái)?shù)據(jù)顯示到液晶顯示屏上。
(2)車(chē)外控制器語(yǔ)音數(shù)據(jù)的產(chǎn)生和采集
車(chē)外操縱手可通過(guò)麥克將自己的語(yǔ)音輸入到AD模塊,數(shù)字語(yǔ)音以9.6 kb/s的速率被音頻編碼器(ENCODER)編碼接收,同遙控?cái)?shù)據(jù)一起被MCU采集,速率為1 Mb/s。
(3)車(chē)外控制器遙控和語(yǔ)音數(shù)據(jù)的傳輸
遙控和語(yǔ)音數(shù)據(jù)在MCU中被組成的遙控/語(yǔ)音數(shù)據(jù)復(fù)合幀以20 ms的幀周期更新,通過(guò)對(duì)外的RS232/RS422可切換接口輸出至地面站[2],便于不同的地面站兼容。
(4)方艙語(yǔ)音數(shù)據(jù)的接收
由于采用雙工通信,地面站方艙內(nèi)人員的語(yǔ)音數(shù)據(jù)通過(guò)RS232/RS422接口輸入到車(chē)外控制器的MCU中, MCU對(duì)語(yǔ)音數(shù)據(jù)幀中的語(yǔ)音數(shù)據(jù)進(jìn)行提取,以1 Mb/s的速率發(fā)送到音頻解碼器(DECODER)進(jìn)行解碼,以9.6 kb/s的速率輸入到DA電路產(chǎn)生模擬語(yǔ)音,語(yǔ)音可通過(guò)耳機(jī)被車(chē)外操縱手接聽(tīng)。
需要說(shuō)明的是,方艙里內(nèi)置一個(gè)語(yǔ)音采集器,其內(nèi)部的語(yǔ)音采集、接收和發(fā)送模塊與車(chē)外控制器內(nèi)部設(shè)計(jì)原理一致;車(chē)外控制器和語(yǔ)音采集器之間可采用長(zhǎng)度為120 m的線纜連接,擴(kuò)大了車(chē)外操作手的活動(dòng)范圍。
無(wú)人機(jī)車(chē)外控制器使用示意圖見(jiàn)圖1。
國(guó)內(nèi)車(chē)外控制器設(shè)計(jì)研制之初考慮到地面站內(nèi)人員和車(chē)外人員的交流,加入了語(yǔ)音通信功能,但開(kāi)始只是應(yīng)用對(duì)講機(jī)進(jìn)行通話,而對(duì)講機(jī)是單工通信機(jī)制,通話時(shí)易形成競(jìng)爭(zhēng);后來(lái)部分單位在有線車(chē)外控制器的信號(hào)傳輸線纜上增加了模擬語(yǔ)音,實(shí)現(xiàn)了車(chē)內(nèi)測(cè)控臺(tái)和車(chē)外控制人員的雙工通信,而模擬語(yǔ)音容易自激,通話易受干擾[1]。
基于已有無(wú)人機(jī)系統(tǒng)的應(yīng)用經(jīng)驗(yàn),設(shè)計(jì)了一種數(shù)字語(yǔ)音和遙控?cái)?shù)據(jù)共同傳輸?shù)男滦蜔o(wú)人機(jī)車(chē)外控制器。本文將對(duì)其設(shè)計(jì)組成、尤其是數(shù)話同傳技術(shù)的實(shí)現(xiàn)方法進(jìn)行詳細(xì)說(shuō)明,最后對(duì)其測(cè)試和應(yīng)用環(huán)境進(jìn)行介紹。
1 車(chē)外控制器的設(shè)計(jì)組成
1.1 系統(tǒng)設(shè)計(jì)組成
無(wú)人機(jī)車(chē)外控制器系統(tǒng)設(shè)計(jì)組成見(jiàn)圖2。
(1)車(chē)外控制器遙控?cái)?shù)據(jù)的產(chǎn)生和采集
通過(guò)車(chē)外操縱手對(duì)車(chē)外控制器各機(jī)構(gòu)(搖桿、開(kāi)關(guān)和微調(diào))的操縱,引起內(nèi)部電位器和電開(kāi)關(guān)變化進(jìn)而引起電信號(hào)的變化。變化的電壓通過(guò)信號(hào)調(diào)理電路發(fā)送到微處理器(MCU),由MCU內(nèi)部的AD模塊進(jìn)行處理;變化的數(shù)字量直接輸入到MCU。MCU把當(dāng)前的遙控?cái)?shù)據(jù)顯示到液晶顯示屏上。
(2)車(chē)外控制器語(yǔ)音數(shù)據(jù)的產(chǎn)生和采集
車(chē)外操縱手可通過(guò)麥克將自己的語(yǔ)音輸入到AD模塊,數(shù)字語(yǔ)音以9.6 kb/s的速率被音頻編碼器(ENCODER)編碼接收,同遙控?cái)?shù)據(jù)一起被MCU采集,速率為1 Mb/s。
(3)車(chē)外控制器遙控和語(yǔ)音數(shù)據(jù)的傳輸
遙控和語(yǔ)音數(shù)據(jù)在MCU中被組成的遙控/語(yǔ)音數(shù)據(jù)復(fù)合幀以20 ms的幀周期更新,通過(guò)對(duì)外的RS232/RS422可切換接口輸出至地面站[2],便于不同的地面站兼容。
(4)方艙語(yǔ)音數(shù)據(jù)的接收
由于采用雙工通信,地面站方艙內(nèi)人員的語(yǔ)音數(shù)據(jù)通過(guò)RS232/RS422接口輸入到車(chē)外控制器的MCU中, MCU對(duì)語(yǔ)音數(shù)據(jù)幀中的語(yǔ)音數(shù)據(jù)進(jìn)行提取,以1 Mb/s的速率發(fā)送到音頻解碼器(DECODER)進(jìn)行解碼,以9.6 kb/s的速率輸入到DA電路產(chǎn)生模擬語(yǔ)音,語(yǔ)音可通過(guò)耳機(jī)被車(chē)外操縱手接聽(tīng)。
需要說(shuō)明的是,方艙里內(nèi)置一個(gè)語(yǔ)音采集器,其內(nèi)部的語(yǔ)音采集、接收和發(fā)送模塊與車(chē)外控制器內(nèi)部設(shè)計(jì)原理一致;車(chē)外控制器和語(yǔ)音采集器之間可采用長(zhǎng)度為120 m的線纜連接,擴(kuò)大了車(chē)外操作手的活動(dòng)范圍。
下載該資料的人也在下載
下載該資料的人還在閱讀
更多 >
- 反無(wú)人機(jī)系統(tǒng)的雙核控制器設(shè)計(jì)與實(shí)現(xiàn) 14次下載
- 一種小型復(fù)合式無(wú)人機(jī)飛行控制布局方案 23次下載
- 小型電動(dòng)無(wú)人機(jī)的總體參數(shù)設(shè)計(jì)方法研究說(shuō)明 19次下載
- 無(wú)人機(jī)和無(wú)人機(jī)控制方法及無(wú)人機(jī)遠(yuǎn)程操控系統(tǒng)方法說(shuō)明 69次下載
- 無(wú)人機(jī)中繼模塊和無(wú)人機(jī)圖傳控制系統(tǒng)介紹 60次下載
- 無(wú)人機(jī)PID控制律設(shè)計(jì)方案pdf下載 11次下載
- 無(wú)人機(jī)環(huán)繞目標(biāo)飛行控制 2次下載
- 基于STM32微控制器的小型無(wú)人機(jī)飛行控制系統(tǒng) 37次下載
- ADI民用無(wú)人機(jī)解決方案 19次下載
- 無(wú)人機(jī)競(jìng)速場(chǎng)地方案 0次下載
- 無(wú)人機(jī)快速充電設(shè)計(jì)方案解析 3次下載
- 基于FPGA的無(wú)人機(jī)控制器設(shè)計(jì)與實(shí)現(xiàn) 212次下載
- 無(wú)人機(jī)飛行控制系統(tǒng)地面仿真平臺(tái)設(shè)計(jì)與實(shí)現(xiàn) 136次下載
- 數(shù)話同傳控制器的設(shè)計(jì)與實(shí)現(xiàn)
- 某小型無(wú)人機(jī)的飛行控制計(jì)算機(jī)的硬件設(shè)計(jì)
- 一種基于Arduino的無(wú)人機(jī)控制器設(shè)計(jì)方案 596次閱讀
- 什么是無(wú)人機(jī)圖傳系統(tǒng)?無(wú)人機(jī)圖傳系統(tǒng)的構(gòu)成 9038次閱讀
- 無(wú)人機(jī)導(dǎo)航技術(shù)及其特點(diǎn)解析 3460次閱讀
- 無(wú)人機(jī)鏈路系統(tǒng)的組成 1.6w次閱讀
- 如何自制一個(gè)自動(dòng)駕駛無(wú)人機(jī) 7037次閱讀
- 基于樹(shù)莓派實(shí)現(xiàn)的水下無(wú)人機(jī)設(shè)計(jì)方案 3564次閱讀
- 無(wú)人機(jī)電子速度控制器(ESC)參考設(shè)計(jì) 1937次閱讀
- 淺析基于FPGA的無(wú)人機(jī)控制器設(shè)計(jì)方案解析 6749次閱讀
- 無(wú)人機(jī)飛控系統(tǒng)半實(shí)物仿真平臺(tái)設(shè)計(jì)方案解析 1w次閱讀
- 無(wú)人機(jī)容易被干擾的原理 5828次閱讀
- 新疆為什么禁飛無(wú)人機(jī)_新疆無(wú)人機(jī)禁飛區(qū)域 5.7w次閱讀
- 水下無(wú)人機(jī)原理分析 1.3w次閱讀
- nixie微型無(wú)人機(jī)的功能介紹_nixie微型無(wú)人機(jī)多少錢(qián) 1.3w次閱讀
- 無(wú)人機(jī)飛行控制器硬件結(jié)構(gòu)及電路設(shè)計(jì)—電路精選(51) 2.8w次閱讀
- 如此火熱!無(wú)人機(jī)圖傳有多方便? 5458次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1電子電路原理第七版PDF電子教材免費(fèi)下載
- 0.00 MB | 1491次下載 | 免費(fèi)
- 2單片機(jī)典型實(shí)例介紹
- 18.19 MB | 95次下載 | 1 積分
- 3S7-200PLC編程實(shí)例詳細(xì)資料
- 1.17 MB | 27次下載 | 1 積分
- 4筆記本電腦主板的元件識(shí)別和講解說(shuō)明
- 4.28 MB | 18次下載 | 4 積分
- 5開(kāi)關(guān)電源原理及各功能電路詳解
- 0.38 MB | 11次下載 | 免費(fèi)
- 6100W短波放大電路圖
- 0.05 MB | 4次下載 | 3 積分
- 7基于單片機(jī)和 SG3525的程控開(kāi)關(guān)電源設(shè)計(jì)
- 0.23 MB | 4次下載 | 免費(fèi)
- 8基于AT89C2051/4051單片機(jī)編程器的實(shí)驗(yàn)
- 0.11 MB | 4次下載 | 免費(fèi)
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234313次下載 | 免費(fèi)
- 2PADS 9.0 2009最新版 -下載
- 0.00 MB | 66304次下載 | 免費(fèi)
- 3protel99下載protel99軟件下載(中文版)
- 0.00 MB | 51209次下載 | 免費(fèi)
- 4LabView 8.0 專(zhuān)業(yè)版下載 (3CD完整版)
- 0.00 MB | 51043次下載 | 免費(fèi)
- 5555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33562次下載 | 免費(fèi)
- 6接口電路圖大全
- 未知 | 30320次下載 | 免費(fèi)
- 7Multisim 10下載Multisim 10 中文版
- 0.00 MB | 28588次下載 | 免費(fèi)
- 8開(kāi)關(guān)電源設(shè)計(jì)實(shí)例指南
- 未知 | 21539次下載 | 免費(fèi)
總榜
- 1matlab軟件下載入口
- 未知 | 935053次下載 | 免費(fèi)
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537793次下載 | 免費(fèi)
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420026次下載 | 免費(fèi)
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234313次下載 | 免費(fèi)
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費(fèi)
- 6電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191183次下載 | 免費(fèi)
- 7十天學(xué)會(huì)AVR單片機(jī)與C語(yǔ)言視頻教程 下載
- 158M | 183277次下載 | 免費(fèi)
- 8proe5.0野火版下載(中文版免費(fèi)下載)
- 未知 | 138039次下載 | 免費(fèi)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論