 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻一種光電傳感和路徑記憶的智能車導(dǎo)航系統(tǒng)的設(shè)計(jì)實(shí)現(xiàn)
2017-11-29 |
rar |
0.5 MB |
次下載 |
1積分
資料介紹
智能車的誕生為人類提供了一種全新的緩解城市交通擁堵、提高車輛安全性的交通工具。在眾多的智能車導(dǎo)航方案中,視覺導(dǎo)航由于與人類的駕駛方式最為接近,成為智能車研究熱點(diǎn)之一。目前,視覺導(dǎo)航方法在高速公路環(huán)境中已經(jīng)獲得了初步成功,這類環(huán)境結(jié)構(gòu)化程度較高,道路曲率有限、路況相對簡單。然而,隨著城市環(huán)境智能車研究的興起,視覺導(dǎo)航面臨了新的挑戰(zhàn)。城市環(huán)境中的道路不僅種類多,而且轉(zhuǎn)彎半徑大,常常會因視野有限而導(dǎo)致道路跟蹤失敗。本文將從該智能車總體方案、路徑識別方案選擇、轉(zhuǎn)向和驅(qū)動控制及路徑記憶算法等方面進(jìn)行介紹。
智能車總體方案
智能車系統(tǒng)以飛思卡爾公司的MC68S912DP256為核心,由電源模塊、傳感器模塊、直流電機(jī)驅(qū)動模塊、轉(zhuǎn)向電機(jī)控制模塊、控制參數(shù)選擇模塊、單片機(jī) 模塊等組成,如圖1所示。智能車系統(tǒng)工作電壓由+1.6V、+5V、7.2V三個(gè)系統(tǒng)混合組成,其中7.2V用于給驅(qū)動電機(jī)和轉(zhuǎn)向舵機(jī)供電,5V給車速傳 感器、MCU以及光電傳感器接收管供電,1.6V給發(fā)光管供電。為了在線控制參數(shù)的調(diào)整方便,還設(shè)置了一個(gè)控制參數(shù)選擇模塊,可以通過幾個(gè)按鍵的設(shè)置,調(diào) 用不同的程序或控制參數(shù),以適應(yīng)不同場地條件的要求。
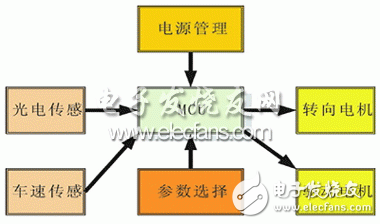
圖1 智能車總體結(jié)構(gòu)
智能車的工作模式是:光電傳感器探測賽道信息,轉(zhuǎn)速傳感器檢測當(dāng)前車速,電池電壓監(jiān)測電路檢測電池電壓,并將這些信息輸入單片機(jī)進(jìn)行處理。通過控制算法對賽車發(fā)出控制命令,通過轉(zhuǎn)向舵機(jī)和驅(qū)動電機(jī)對賽車的運(yùn)動軌跡和速度進(jìn)行實(shí)時(shí)控制。
路徑識別方案選擇與電路設(shè)計(jì)
路徑識別方案是首先需要確定的,主要有以下幾個(gè)問題。
*光電識別還是攝像頭識別;
*傳感器如何排列?間隔多大、形狀如何、單排還是雙排;
*傳感器可向前探測的遠(yuǎn)度;
*傳感器信號采用數(shù)字式還是模擬式;
*電路上如何實(shí)現(xiàn)。
由于光電識別方案簡單可靠,因此本文采用了光電識別方案。
數(shù)字式光電識別與模擬式光電識別
光電式傳感器是以光電器件作為轉(zhuǎn)換元件的傳感器。它可用于檢測直接引起光量變化的非電量,如光強(qiáng)、光照度、輻射測溫、氣體成分分析等;也可用來檢測能轉(zhuǎn)換成光量變化的其他非電量,如零件直徑、表面粗糙度、應(yīng)變、位移、振動、速度、加速度,以及物體的形狀、工作狀態(tài)的識別等。光電式傳感器具有非接觸、響應(yīng)快、性能可靠等特點(diǎn),因此在工業(yè)自動化裝置和機(jī)器人中獲得廣泛應(yīng)用。近年來,新的光電器件不斷涌現(xiàn),特別是CCD圖像傳感器的誕生,為光電傳感器的進(jìn)一步應(yīng)用開創(chuàng)了新的一頁。
模擬式光電傳感器從理論上可以大大提高路徑探測精度。模擬式光電傳感器的發(fā)光和接收都是錐角一定的圓錐形空間,其電壓大小與傳感器距離黑色路徑標(biāo)記線的水 平距離有定量關(guān)系:離黑線越近,電壓越低,離黑線越遠(yuǎn),則電壓越高(具體的對應(yīng)關(guān)系與光電管型號以及離地高度有關(guān)),如圖2所示。
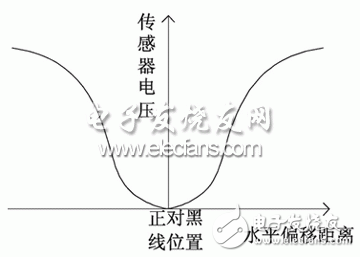
圖2 傳感器電壓與偏移距離關(guān)系示意圖
因此,只要掌握了傳感器電壓-偏移距離特性關(guān)系,就可以根據(jù)傳感器電壓大小確定各傳感器與黑色標(biāo)記線的距離(而不是僅僅粗略判斷該傳感器是否在線上),進(jìn)而獲得車身縱軸線相對路徑標(biāo)記線的位置,得到連續(xù)分布的路徑信息。
根據(jù)實(shí)車試驗(yàn),可以將路徑探測的精度提高到1mm.這樣傳感器采集的信息就能保證了單片機(jī)可以獲得精確的賽道信息,從而為提高賽車的精確控制提供了保證。
雙排排列與前瞻設(shè)計(jì)
本文開發(fā)了智能車性能仿真平臺[2],對傳感器的布局進(jìn)行了深入研究[3]。由于轉(zhuǎn)向舵機(jī)、電機(jī)和車都是高階慣性延遲環(huán)節(jié),從輸入到輸出需要一定的時(shí)間, 越早知道前方道路的信息,就越能減小從輸入到輸出的滯后。檢測車前方一定距離的賽道就叫前瞻,在一定的前瞻范圍內(nèi),前瞻越大的傳感器方案,其極限速度就會 越高,其高速行駛過程中對引導(dǎo)線的跟隨精度也相對較高,系統(tǒng)的整體響應(yīng)性能較好。因此路徑識別模塊設(shè)計(jì)成抬起與地面形成一個(gè)夾角,前排傳感器用于前瞻,后 排傳感器對賽道始點(diǎn)進(jìn)行識別、計(jì)算車身縱軸線與賽道中心線的偏差斜率,以利于更好地調(diào)整車輛的姿態(tài)。
智能車總體方案
智能車系統(tǒng)以飛思卡爾公司的MC68S912DP256為核心,由電源模塊、傳感器模塊、直流電機(jī)驅(qū)動模塊、轉(zhuǎn)向電機(jī)控制模塊、控制參數(shù)選擇模塊、單片機(jī) 模塊等組成,如圖1所示。智能車系統(tǒng)工作電壓由+1.6V、+5V、7.2V三個(gè)系統(tǒng)混合組成,其中7.2V用于給驅(qū)動電機(jī)和轉(zhuǎn)向舵機(jī)供電,5V給車速傳 感器、MCU以及光電傳感器接收管供電,1.6V給發(fā)光管供電。為了在線控制參數(shù)的調(diào)整方便,還設(shè)置了一個(gè)控制參數(shù)選擇模塊,可以通過幾個(gè)按鍵的設(shè)置,調(diào) 用不同的程序或控制參數(shù),以適應(yīng)不同場地條件的要求。
圖1 智能車總體結(jié)構(gòu)
智能車的工作模式是:光電傳感器探測賽道信息,轉(zhuǎn)速傳感器檢測當(dāng)前車速,電池電壓監(jiān)測電路檢測電池電壓,并將這些信息輸入單片機(jī)進(jìn)行處理。通過控制算法對賽車發(fā)出控制命令,通過轉(zhuǎn)向舵機(jī)和驅(qū)動電機(jī)對賽車的運(yùn)動軌跡和速度進(jìn)行實(shí)時(shí)控制。
路徑識別方案選擇與電路設(shè)計(jì)
路徑識別方案是首先需要確定的,主要有以下幾個(gè)問題。
*光電識別還是攝像頭識別;
*傳感器如何排列?間隔多大、形狀如何、單排還是雙排;
*傳感器可向前探測的遠(yuǎn)度;
*傳感器信號采用數(shù)字式還是模擬式;
*電路上如何實(shí)現(xiàn)。
由于光電識別方案簡單可靠,因此本文采用了光電識別方案。
數(shù)字式光電識別與模擬式光電識別
光電式傳感器是以光電器件作為轉(zhuǎn)換元件的傳感器。它可用于檢測直接引起光量變化的非電量,如光強(qiáng)、光照度、輻射測溫、氣體成分分析等;也可用來檢測能轉(zhuǎn)換成光量變化的其他非電量,如零件直徑、表面粗糙度、應(yīng)變、位移、振動、速度、加速度,以及物體的形狀、工作狀態(tài)的識別等。光電式傳感器具有非接觸、響應(yīng)快、性能可靠等特點(diǎn),因此在工業(yè)自動化裝置和機(jī)器人中獲得廣泛應(yīng)用。近年來,新的光電器件不斷涌現(xiàn),特別是CCD圖像傳感器的誕生,為光電傳感器的進(jìn)一步應(yīng)用開創(chuàng)了新的一頁。
模擬式光電傳感器從理論上可以大大提高路徑探測精度。模擬式光電傳感器的發(fā)光和接收都是錐角一定的圓錐形空間,其電壓大小與傳感器距離黑色路徑標(biāo)記線的水 平距離有定量關(guān)系:離黑線越近,電壓越低,離黑線越遠(yuǎn),則電壓越高(具體的對應(yīng)關(guān)系與光電管型號以及離地高度有關(guān)),如圖2所示。
圖2 傳感器電壓與偏移距離關(guān)系示意圖
因此,只要掌握了傳感器電壓-偏移距離特性關(guān)系,就可以根據(jù)傳感器電壓大小確定各傳感器與黑色標(biāo)記線的距離(而不是僅僅粗略判斷該傳感器是否在線上),進(jìn)而獲得車身縱軸線相對路徑標(biāo)記線的位置,得到連續(xù)分布的路徑信息。
根據(jù)實(shí)車試驗(yàn),可以將路徑探測的精度提高到1mm.這樣傳感器采集的信息就能保證了單片機(jī)可以獲得精確的賽道信息,從而為提高賽車的精確控制提供了保證。
雙排排列與前瞻設(shè)計(jì)
本文開發(fā)了智能車性能仿真平臺[2],對傳感器的布局進(jìn)行了深入研究[3]。由于轉(zhuǎn)向舵機(jī)、電機(jī)和車都是高階慣性延遲環(huán)節(jié),從輸入到輸出需要一定的時(shí)間, 越早知道前方道路的信息,就越能減小從輸入到輸出的滯后。檢測車前方一定距離的賽道就叫前瞻,在一定的前瞻范圍內(nèi),前瞻越大的傳感器方案,其極限速度就會 越高,其高速行駛過程中對引導(dǎo)線的跟隨精度也相對較高,系統(tǒng)的整體響應(yīng)性能較好。因此路徑識別模塊設(shè)計(jì)成抬起與地面形成一個(gè)夾角,前排傳感器用于前瞻,后 排傳感器對賽道始點(diǎn)進(jìn)行識別、計(jì)算車身縱軸線與賽道中心線的偏差斜率,以利于更好地調(diào)整車輛的姿態(tài)。
下載該資料的人也在下載
下載該資料的人還在閱讀
更多 >
- 光電傳感器的連續(xù)路徑識別算法及實(shí)現(xiàn) 6次下載
- 使用光電傳感和路徑記憶進(jìn)行車輛導(dǎo)航系統(tǒng)的設(shè)計(jì)資料說明 5次下載
- 智能車光電傳感器布局對路徑識別有哪些影響詳細(xì)資料研究 10次下載
- 如何設(shè)計(jì)一個(gè)具有路徑記憶功能的智能車控制系統(tǒng)的資料概述 16次下載
- 一種自動循跡智能車控制系統(tǒng) 2次下載
- 基于光電管路徑識別的智能車系統(tǒng)設(shè)計(jì)方案解析 1次下載
- 基于紅外線光電傳感器尋跡的智能車系統(tǒng)設(shè)計(jì)方法 5次下載
- 基于數(shù)學(xué)形態(tài)學(xué)與智能車路徑記憶的詳解 2次下載
- 一種光電智能車尋跡算法的研究 42次下載
- 電磁導(dǎo)航式智能車的設(shè)計(jì)與實(shí)現(xiàn) 3次下載
- 基于激光傳感器的智能車路徑識別算法研究 48次下載
- 智能車兩類路徑識別系統(tǒng)比較研究 0次下載
- 飛思卡爾智能車控制系統(tǒng)設(shè)計(jì) 164次下載
- 基于路徑識別的智能車系統(tǒng)設(shè)計(jì)
- 基于光電傳感器的路徑檢測試驗(yàn)
- 基于機(jī)器視覺的智能車系統(tǒng) 1633次閱讀
- 基于電感感應(yīng)電動勢實(shí)現(xiàn)磁場信號引導(dǎo)車的設(shè)計(jì) 2328次閱讀
- 基于MC68S912DP256芯片實(shí)現(xiàn)智能車導(dǎo)航系統(tǒng)的設(shè)計(jì) 2189次閱讀
- 基于連續(xù)控制算法實(shí)現(xiàn)光電傳感器的連續(xù)路徑識別 958次閱讀
- 嵌入式導(dǎo)航系統(tǒng)如何設(shè)計(jì)實(shí)現(xiàn) 1604次閱讀
- 光電傳感器對智能車的控制設(shè)計(jì) 1804次閱讀
- 基于光電傳感器的智能燈控系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn) 5818次閱讀
- 光電傳感器工作原理及分類 2.2w次閱讀
- 三分鐘了解慣性導(dǎo)航系統(tǒng)、加速度計(jì)、陀螺儀的工作原理 6.6w次閱讀
- 光電傳感器怎么調(diào)節(jié)_光電傳感器使用方法 7w次閱讀
- 基于FPGA的慣性導(dǎo)航系統(tǒng)設(shè)計(jì) 2944次閱讀
- 光電傳感器的應(yīng)用實(shí)例_光電傳感器工作原理_光電傳感器接線圖 6.1w次閱讀
- 基于雙口RAM的組合導(dǎo)航系統(tǒng)設(shè)計(jì)與應(yīng)用 1210次閱讀
- 光電傳感器的結(jié)構(gòu)原理解析和光電傳感器的應(yīng)用 5640次閱讀
- 光電傳感器的應(yīng)用實(shí)例詳解 8890次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1電子電路原理第七版PDF電子教材免費(fèi)下載
- 0.00 MB | 1491次下載 | 免費(fèi)
- 2單片機(jī)典型實(shí)例介紹
- 18.19 MB | 95次下載 | 1 積分
- 3S7-200PLC編程實(shí)例詳細(xì)資料
- 1.17 MB | 27次下載 | 1 積分
- 4筆記本電腦主板的元件識別和講解說明
- 4.28 MB | 18次下載 | 4 積分
- 5開關(guān)電源原理及各功能電路詳解
- 0.38 MB | 11次下載 | 免費(fèi)
- 6100W短波放大電路圖
- 0.05 MB | 4次下載 | 3 積分
- 7基于單片機(jī)和 SG3525的程控開關(guān)電源設(shè)計(jì)
- 0.23 MB | 4次下載 | 免費(fèi)
- 8基于AT89C2051/4051單片機(jī)編程器的實(shí)驗(yàn)
- 0.11 MB | 4次下載 | 免費(fèi)
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234313次下載 | 免費(fèi)
- 2PADS 9.0 2009最新版 -下載
- 0.00 MB | 66304次下載 | 免費(fèi)
- 3protel99下載protel99軟件下載(中文版)
- 0.00 MB | 51209次下載 | 免費(fèi)
- 4LabView 8.0 專業(yè)版下載 (3CD完整版)
- 0.00 MB | 51043次下載 | 免費(fèi)
- 5555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33562次下載 | 免費(fèi)
- 6接口電路圖大全
- 未知 | 30320次下載 | 免費(fèi)
- 7Multisim 10下載Multisim 10 中文版
- 0.00 MB | 28588次下載 | 免費(fèi)
- 8開關(guān)電源設(shè)計(jì)實(shí)例指南
- 未知 | 21539次下載 | 免費(fèi)
總榜
- 1matlab軟件下載入口
- 未知 | 935053次下載 | 免費(fèi)
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537793次下載 | 免費(fèi)
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420026次下載 | 免費(fèi)
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234313次下載 | 免費(fèi)
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費(fèi)
- 6電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191183次下載 | 免費(fèi)
- 7十天學(xué)會AVR單片機(jī)與C語言視頻教程 下載
- 158M | 183277次下載 | 免費(fèi)
- 8proe5.0野火版下載(中文版免費(fèi)下載)
- 未知 | 138039次下載 | 免費(fèi)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論