 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問(wèn)
提問(wèn)  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
介紹了一個(gè)基于單片機(jī)的電子式轉(zhuǎn)速里程表實(shí)現(xiàn)方案,討論了里程計(jì)數(shù)的原理和轉(zhuǎn)速指示原理,給出了用單片機(jī)AT89C2051和LM1819驅(qū)動(dòng)器設(shè)計(jì)的汽車(chē)轉(zhuǎn)速里程表的具體電路原理圖。
1 概述
傳統(tǒng)的汽車(chē)轉(zhuǎn)速里程表的功能有兩個(gè),一是用指針指示汽車(chē)行駛的瞬時(shí)車(chē)速,二是用機(jī)械計(jì)數(shù)器記錄汽車(chē)行駛的累計(jì)里程。現(xiàn)代汽車(chē)正向高速化方向發(fā)展,隨著車(chē)速的提高,用軟軸驅(qū)動(dòng)的傳統(tǒng)車(chē)速里程表受到前所未有的挑戰(zhàn),這是因?yàn)檐涊S在高速旋轉(zhuǎn)時(shí),由于受鋼絲交變應(yīng)力極限的限制而容易斷裂,同時(shí),軟軸布置過(guò)長(zhǎng)會(huì)出現(xiàn)形變過(guò)大或運(yùn)動(dòng)遲滯等現(xiàn)象,而且,對(duì)于不同的車(chē)型,轉(zhuǎn)速里程表的安裝位置也會(huì)受到軟軸長(zhǎng)度及彎曲度的限制。凡此種種,使得基于非接觸式轉(zhuǎn)速傳感器的電子式轉(zhuǎn)速里程表得以迅速發(fā)展。
2 里程累計(jì)實(shí)現(xiàn)原理
車(chē)速里程表的速比表示的是:車(chē)速里程表轉(zhuǎn)軸(軟軸)在汽車(chē)行駛一公里時(shí)所轉(zhuǎn)過(guò)的轉(zhuǎn)數(shù)。 基于單片機(jī)的車(chē)速里程表采用霍爾型非接觸式轉(zhuǎn)速傳感器。這種車(chē)速里程表轉(zhuǎn)軸每轉(zhuǎn)一圈,霍爾傳感器將感應(yīng)發(fā)出8?jìng)€(gè)脈沖。現(xiàn)在以速比為1:624的車(chē)型為例? 汽車(chē)行駛一公里? 則霍爾傳感器發(fā)出的脈沖數(shù)共為8×624=4992個(gè),或者說(shuō),每個(gè)脈沖代表了1/4992公里的里程。將這些脈沖信號(hào)當(dāng)作外部中斷源輸入給單片機(jī),使每個(gè)脈沖產(chǎn)生一個(gè)中斷,并通過(guò)中斷服務(wù)程序?qū)γ總€(gè)脈沖進(jìn)行計(jì)數(shù),這樣,當(dāng)計(jì)滿(mǎn)4992時(shí),表明汽車(chē)行駛了1公里,然后再給累計(jì)單元加一,并存入EEPROM單元,最后通過(guò)刷新LCD液晶顯示器,即可實(shí)現(xiàn)里程計(jì)數(shù)功能。但在編程時(shí)要注意,MCS-51系列單片機(jī)的外部中斷有兩種觸發(fā)方式,即電平觸發(fā)和邊沿觸發(fā),本設(shè)計(jì)選用邊沿觸發(fā)方式,即采用負(fù)跳變引起中斷。
3 車(chē)速測(cè)量及指示原理
車(chē)速指示可采用雙線(xiàn)圈汽車(chē)轉(zhuǎn)速表頭,它由空氣軸表芯和驅(qū)動(dòng)電路組成,空氣軸表芯通常由三部分組成:磁鐵、與轉(zhuǎn)軸相連的指針和兩個(gè)互成九十度的線(xiàn)圈。轉(zhuǎn)軸是表芯唯一的可動(dòng)部件,磁鐵的轉(zhuǎn)角總是趨向于兩個(gè)線(xiàn)圈的磁場(chǎng)強(qiáng)度矢量的合成方向,磁場(chǎng)強(qiáng)度正比于加在線(xiàn)圈上的電壓,因此,通過(guò)改變電壓的極性和幅度,可在理論上使轉(zhuǎn)軸組件在0~360度范圍內(nèi)轉(zhuǎn)動(dòng)。顯然,只要能按一定的規(guī)律驅(qū)動(dòng)兩個(gè)線(xiàn)圈,就可以使指針偏轉(zhuǎn)位置與輸入量成線(xiàn)性關(guān)系,即滿(mǎn)足下列公式:
θ=KVin
其中θ為指針偏轉(zhuǎn)角,單位為度; K為轉(zhuǎn)角常數(shù),單位為度/V; Vin是輸入電壓,單位為V。
每個(gè)線(xiàn)圈的磁場(chǎng)強(qiáng)度矢量之和必須跟隨偏轉(zhuǎn)角θ。考慮到轉(zhuǎn)軸組件總是指向Hsine和Hcosine這兩個(gè)正交矢量之和的方向?則其方向可由下式求得?
θ=arctan Hsine/Hcosine
并由此可以得出:
θ=arctan sinθ/cosθ
由上述公式可見(jiàn)?當(dāng)Hsine按θ的正弦函數(shù)變化,而Hcosine按θ的余弦函數(shù)變化時(shí)?所得到的總磁場(chǎng)強(qiáng)度的方向與θ角的方向相同,由于轉(zhuǎn)軸組件與磁場(chǎng)強(qiáng)度矢量和的方向相同,因此,指針將始終指向θ角的方向。
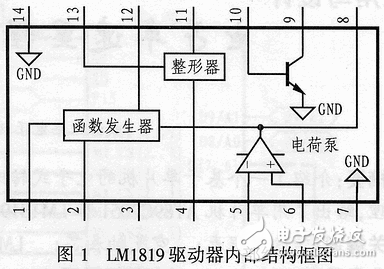
圖1所示是LM1819驅(qū)動(dòng)器的內(nèi)部組成原理框圖,它由電荷泵、整形器、函數(shù)發(fā)生器等組成?輸入的轉(zhuǎn)速信號(hào)通過(guò)內(nèi)部的三極管緩沖后,輸入到電荷泵即可進(jìn)行F/V頻率電壓轉(zhuǎn)換,兩個(gè)輸出端按輸入量的正弦和余弦函數(shù)變化,2腳和12腳的最小驅(qū)動(dòng)能力為±20mA(±4V),線(xiàn)圈的公共端接到1腳可為內(nèi)部函數(shù)發(fā)生器提供反饋信號(hào), 同時(shí)為5.1V齊納二極管提供參考電壓。在該電路中,K=54°/V,輸入Vin 實(shí)際上是4腳和8腳的電位差,8腳既是諾頓放大器的輸出, 又是函數(shù)發(fā)生器的輸入,一般4腳的電壓是2.1V,所以有:
θ=K(V8-Vref)=54(V8-2。1)
由于V8是在2.1V~7.1V的范圍內(nèi)變化的,故LM1819可以驅(qū)動(dòng)十字表頭以使其在0°~270°范圍內(nèi)轉(zhuǎn)動(dòng)。
1 概述
傳統(tǒng)的汽車(chē)轉(zhuǎn)速里程表的功能有兩個(gè),一是用指針指示汽車(chē)行駛的瞬時(shí)車(chē)速,二是用機(jī)械計(jì)數(shù)器記錄汽車(chē)行駛的累計(jì)里程。現(xiàn)代汽車(chē)正向高速化方向發(fā)展,隨著車(chē)速的提高,用軟軸驅(qū)動(dòng)的傳統(tǒng)車(chē)速里程表受到前所未有的挑戰(zhàn),這是因?yàn)檐涊S在高速旋轉(zhuǎn)時(shí),由于受鋼絲交變應(yīng)力極限的限制而容易斷裂,同時(shí),軟軸布置過(guò)長(zhǎng)會(huì)出現(xiàn)形變過(guò)大或運(yùn)動(dòng)遲滯等現(xiàn)象,而且,對(duì)于不同的車(chē)型,轉(zhuǎn)速里程表的安裝位置也會(huì)受到軟軸長(zhǎng)度及彎曲度的限制。凡此種種,使得基于非接觸式轉(zhuǎn)速傳感器的電子式轉(zhuǎn)速里程表得以迅速發(fā)展。
2 里程累計(jì)實(shí)現(xiàn)原理
車(chē)速里程表的速比表示的是:車(chē)速里程表轉(zhuǎn)軸(軟軸)在汽車(chē)行駛一公里時(shí)所轉(zhuǎn)過(guò)的轉(zhuǎn)數(shù)。 基于單片機(jī)的車(chē)速里程表采用霍爾型非接觸式轉(zhuǎn)速傳感器。這種車(chē)速里程表轉(zhuǎn)軸每轉(zhuǎn)一圈,霍爾傳感器將感應(yīng)發(fā)出8?jìng)€(gè)脈沖。現(xiàn)在以速比為1:624的車(chē)型為例? 汽車(chē)行駛一公里? 則霍爾傳感器發(fā)出的脈沖數(shù)共為8×624=4992個(gè),或者說(shuō),每個(gè)脈沖代表了1/4992公里的里程。將這些脈沖信號(hào)當(dāng)作外部中斷源輸入給單片機(jī),使每個(gè)脈沖產(chǎn)生一個(gè)中斷,并通過(guò)中斷服務(wù)程序?qū)γ總€(gè)脈沖進(jìn)行計(jì)數(shù),這樣,當(dāng)計(jì)滿(mǎn)4992時(shí),表明汽車(chē)行駛了1公里,然后再給累計(jì)單元加一,并存入EEPROM單元,最后通過(guò)刷新LCD液晶顯示器,即可實(shí)現(xiàn)里程計(jì)數(shù)功能。但在編程時(shí)要注意,MCS-51系列單片機(jī)的外部中斷有兩種觸發(fā)方式,即電平觸發(fā)和邊沿觸發(fā),本設(shè)計(jì)選用邊沿觸發(fā)方式,即采用負(fù)跳變引起中斷。
3 車(chē)速測(cè)量及指示原理
車(chē)速指示可采用雙線(xiàn)圈汽車(chē)轉(zhuǎn)速表頭,它由空氣軸表芯和驅(qū)動(dòng)電路組成,空氣軸表芯通常由三部分組成:磁鐵、與轉(zhuǎn)軸相連的指針和兩個(gè)互成九十度的線(xiàn)圈。轉(zhuǎn)軸是表芯唯一的可動(dòng)部件,磁鐵的轉(zhuǎn)角總是趨向于兩個(gè)線(xiàn)圈的磁場(chǎng)強(qiáng)度矢量的合成方向,磁場(chǎng)強(qiáng)度正比于加在線(xiàn)圈上的電壓,因此,通過(guò)改變電壓的極性和幅度,可在理論上使轉(zhuǎn)軸組件在0~360度范圍內(nèi)轉(zhuǎn)動(dòng)。顯然,只要能按一定的規(guī)律驅(qū)動(dòng)兩個(gè)線(xiàn)圈,就可以使指針偏轉(zhuǎn)位置與輸入量成線(xiàn)性關(guān)系,即滿(mǎn)足下列公式:
θ=KVin
其中θ為指針偏轉(zhuǎn)角,單位為度; K為轉(zhuǎn)角常數(shù),單位為度/V; Vin是輸入電壓,單位為V。
每個(gè)線(xiàn)圈的磁場(chǎng)強(qiáng)度矢量之和必須跟隨偏轉(zhuǎn)角θ。考慮到轉(zhuǎn)軸組件總是指向Hsine和Hcosine這兩個(gè)正交矢量之和的方向?則其方向可由下式求得?
θ=arctan Hsine/Hcosine
并由此可以得出:
θ=arctan sinθ/cosθ
由上述公式可見(jiàn)?當(dāng)Hsine按θ的正弦函數(shù)變化,而Hcosine按θ的余弦函數(shù)變化時(shí)?所得到的總磁場(chǎng)強(qiáng)度的方向與θ角的方向相同,由于轉(zhuǎn)軸組件與磁場(chǎng)強(qiáng)度矢量和的方向相同,因此,指針將始終指向θ角的方向。
圖1所示是LM1819驅(qū)動(dòng)器的內(nèi)部組成原理框圖,它由電荷泵、整形器、函數(shù)發(fā)生器等組成?輸入的轉(zhuǎn)速信號(hào)通過(guò)內(nèi)部的三極管緩沖后,輸入到電荷泵即可進(jìn)行F/V頻率電壓轉(zhuǎn)換,兩個(gè)輸出端按輸入量的正弦和余弦函數(shù)變化,2腳和12腳的最小驅(qū)動(dòng)能力為±20mA(±4V),線(xiàn)圈的公共端接到1腳可為內(nèi)部函數(shù)發(fā)生器提供反饋信號(hào), 同時(shí)為5.1V齊納二極管提供參考電壓。在該電路中,K=54°/V,輸入Vin 實(shí)際上是4腳和8腳的電位差,8腳既是諾頓放大器的輸出, 又是函數(shù)發(fā)生器的輸入,一般4腳的電壓是2.1V,所以有:
θ=K(V8-Vref)=54(V8-2。1)
由于V8是在2.1V~7.1V的范圍內(nèi)變化的,故LM1819可以驅(qū)動(dòng)十字表頭以使其在0°~270°范圍內(nèi)轉(zhuǎn)動(dòng)。
下載該資料的人也在下載
下載該資料的人還在閱讀
更多 >
- 用于自行車(chē)的里程表和速度計(jì)
- 51單片機(jī)——基于單片機(jī)的智能電子里程表
- 基于51單片機(jī)的車(chē)速里程表項(xiàng)目設(shè)計(jì)
- 汽車(chē)、摩托車(chē)用電子車(chē)速里程表行業(yè)標(biāo)準(zhǔn) 1次下載
- 基于STM32單片機(jī)的電子琴設(shè)計(jì)與實(shí)現(xiàn) 114次下載
- 單片機(jī)音樂(lè)程序的設(shè)計(jì)原理解析資料下載
- 電動(dòng)車(chē)里程表的電路圖免費(fèi)下載 39次下載
- 使用MCS51單片機(jī)設(shè)計(jì)實(shí)現(xiàn)里程表的詳細(xì)資料說(shuō)明 17次下載
- 基于單片機(jī)的電子式轉(zhuǎn)速里程表的設(shè)計(jì) 2次下載
- 車(chē)速里程表信號(hào)裝置及速比的計(jì)算分析 1次下載
- 采用proteus和keil設(shè)計(jì)的汽車(chē)里程表 14次下載
- 基于單片機(jī)的智能小車(chē)速度控制設(shè)計(jì)_李檸 4次下載
- 51單片機(jī)測(cè)量自行車(chē)速度 18次下載
- 電子式里程表設(shè)計(jì) 0次下載
- 車(chē)速里程表原理及速比的計(jì)算方法 75次下載
- STM32單片機(jī)實(shí)現(xiàn)固件在線(xiàn)升級(jí)(IAP) 3601次閱讀
- 單片機(jī)的內(nèi)存映射圖解析 1032次閱讀
- 單片機(jī)的內(nèi)存映射圖解析 1507次閱讀
- 一文解析單片機(jī)晶振腳的原理 4190次閱讀
- 單片機(jī)實(shí)現(xiàn)多機(jī)通信的資料和程序 7540次閱讀
- PIC單片機(jī)和AVR單片機(jī)IO的操作方法解析 2608次閱讀
- 單片機(jī)實(shí)現(xiàn)溫度檢測(cè)電路的設(shè)計(jì) 6317次閱讀
- 實(shí)時(shí)時(shí)鐘的單片機(jī)項(xiàng)目需要學(xué)習(xí)什么知識(shí) 3435次閱讀
- 單片機(jī)復(fù)位電路的基本知識(shí)解析 6933次閱讀
- 如何用51單片機(jī)實(shí)現(xiàn)IIC通信 1.6w次閱讀
- 里程表傳感器檢測(cè)方法 5w次閱讀
- 深度解讀關(guān)于單片機(jī)的車(chē)用數(shù)字儀表系統(tǒng)技術(shù) 4121次閱讀
- FPGA與單片機(jī)實(shí)現(xiàn)數(shù)據(jù)串行通信的解決方案 1.1w次閱讀
- 基于YL-236單片機(jī)實(shí)訓(xùn)裝置的數(shù)字電壓表的設(shè)計(jì)方案 4588次閱讀
- 單片機(jī)設(shè)計(jì):簡(jiǎn)易的自行車(chē)里程表 6175次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1電子電路原理第七版PDF電子教材免費(fèi)下載
- 0.00 MB | 1491次下載 | 免費(fèi)
- 2單片機(jī)典型實(shí)例介紹
- 18.19 MB | 95次下載 | 1 積分
- 3S7-200PLC編程實(shí)例詳細(xì)資料
- 1.17 MB | 27次下載 | 1 積分
- 4筆記本電腦主板的元件識(shí)別和講解說(shuō)明
- 4.28 MB | 18次下載 | 4 積分
- 5開(kāi)關(guān)電源原理及各功能電路詳解
- 0.38 MB | 11次下載 | 免費(fèi)
- 6100W短波放大電路圖
- 0.05 MB | 4次下載 | 3 積分
- 7基于單片機(jī)和 SG3525的程控開(kāi)關(guān)電源設(shè)計(jì)
- 0.23 MB | 4次下載 | 免費(fèi)
- 8基于AT89C2051/4051單片機(jī)編程器的實(shí)驗(yàn)
- 0.11 MB | 4次下載 | 免費(fèi)
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234313次下載 | 免費(fèi)
- 2PADS 9.0 2009最新版 -下載
- 0.00 MB | 66304次下載 | 免費(fèi)
- 3protel99下載protel99軟件下載(中文版)
- 0.00 MB | 51209次下載 | 免費(fèi)
- 4LabView 8.0 專(zhuān)業(yè)版下載 (3CD完整版)
- 0.00 MB | 51043次下載 | 免費(fèi)
- 5555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33562次下載 | 免費(fèi)
- 6接口電路圖大全
- 未知 | 30320次下載 | 免費(fèi)
- 7Multisim 10下載Multisim 10 中文版
- 0.00 MB | 28588次下載 | 免費(fèi)
- 8開(kāi)關(guān)電源設(shè)計(jì)實(shí)例指南
- 未知 | 21539次下載 | 免費(fèi)
總榜
- 1matlab軟件下載入口
- 未知 | 935053次下載 | 免費(fèi)
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537793次下載 | 免費(fèi)
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420026次下載 | 免費(fèi)
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234313次下載 | 免費(fèi)
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費(fèi)
- 6電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191183次下載 | 免費(fèi)
- 7十天學(xué)會(huì)AVR單片機(jī)與C語(yǔ)言視頻教程 下載
- 158M | 183277次下載 | 免費(fèi)
- 8proe5.0野火版下載(中文版免費(fèi)下載)
- 未知 | 138039次下載 | 免費(fèi)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論