 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
當前,機器人的新技術、新產品大量涌現,成為新一輪科技革命和產業變革的重要驅動力,既為發展先進制造業提供了重要突破口,也為改善人們生活提供了有力支撐。而尋光機器人可以在黑暗環境中尋找光源,如洞穴探測光源。
本次課設,主要利用555芯片工作在雙穩態狀態,構成施密特觸發器模式,通過26腳連接到兩個光敏電阻之間,利用兩個光敏電阻在不同光強下產生的不同分壓情況,使555芯片輸出管腳輸出對應的高低電平,進而使兩個輪子的電機的兩端產生不同的電壓差,由此尋光前行。通過仿真,原理圖設計,PCB制作,最終完成了本次課設的所有要求,并在此功能上,加入尋黑線提示的擴展功能。
2018,智能時代已經到來,并深深地影響著現代人類的方方面面。20世紀以來,機器人技術得到迅速發展,水下機器人、空間機器人、空中機器人、地面機器人、微小型機器人等各種用途的機器人相繼問世,在各行各業得到廣泛應用,現如今,機器人已經發展成為一門集機械學、電子學、計算機、自動控制、人工智能、仿生學等多個學科與一體的綜合學科。進入21世紀,更多先進的技術手段將被應用于智能機器人的研發制造中,而更加智能化,更加全面的機器人也會逐漸地進入人類的視野,滲透人類的生活,為人類的生產生活帶來意想不到的便利。不可否認,人類的生產生活將會因為機器人的加入而變得更加方便快捷,變得更加豐富多彩。
而尋光機器人作為機器人領域的一科,對人類起著巨大的作用,故尋光機器人的研究以及制作對人類尤為主要。
對于本次尋光機器人的制作,方案各種各樣,但要做到簡單精確,低造價,還得加以設計,這就是本次制作要考慮解決的問題。本次課設,選用的是555定時器制作尋光機器人,成本低,制作簡便,主要利用555芯片工作在雙穩態狀態,構成施密特觸發器模式。此外通過電路仿真,原理圖設計,PCB制作,再到的作品制作,最后實際作品的測試調試完成最終尋光機器人的制作。
1、 設計目的
1.1 機器人的定義
廣泛的定義,機器人就是在日常生活、工業生產和科研領域中,能代替人工作的機械裝置。雖然現在機器人的應用非常廣泛,但是,不同國家,不同領域的學者給出的定義并不一樣。最多人認可的是美國機器人協會給出的定義:機器人是一種用于移動各種材料、零件、工具或者專用裝置,通過可編程程序動作來執行各種任務并具有編程能力的多功能機械手。
1.2 設計目的
通過課設,加深對《電路分析基礎》、《模擬電子技術》、《數字電子技術》等課程知識的理解,進一步訓練和提高工程實際應用能力,能夠綜合運用基礎課程所學的知識,設計并制作出實際應用電路或系統。
在畫原理圖、PCB的時候,把CAD課程中所學到的知識運用到實際操作中,加深對DXP的理解與記憶;在制作電路板的過程中,懂得板子的制作流程;在查找資料以及設計制作尋光機器人和調試的過程中,加深對555定時器的功能的理解,掌握直流電機的運動控制原理,掌握光敏電阻的應用,并對現代機器人有一定的了解與認識。
2、 設計要求
2.1 功能要求
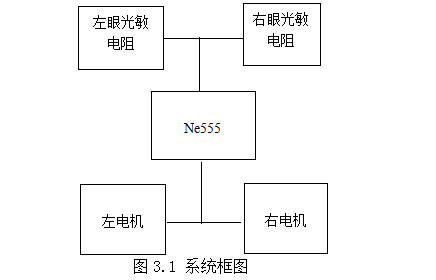
NE55工作在雙穩態狀態,構成施密特觸發器模式。光敏電阻用來檢測機器人前方的環境光。機器人的左眼與右減速電機、右眼與左減速電機,是彼此協同工作的,根據雙眼檢測到的環境光線的差異,由NE555驅動兩只電機做差速運轉,驅動小車向著光線的方向前進,車左右拐彎不同聲音提示。此外可以擴展其他功能。
2.2 器件要求
兩片NE555、兩個光敏電阻、2個減速電動機、其他分立元件。
3、 設計方案
3.1 題目分析
尋光機器人的關鍵地方,在于能讓電機做差速運動,電機的差速運動,則由光敏電阻檢測到光強差控制,機器人的兩只眼睛,用光敏電阻代替,當兩只眼睛,即光敏電阻檢測到左右兩邊的光強差時,控制兩個電機做差速運動。
當左邊光照強時,左電機減速,機器人向左邊運動。
當右邊光照強時,右電機減速,機器人向右邊運動。
要控制電機做減速運動,就要控制電機兩端的電壓。額定電壓內,電機兩端的電壓越大,電機的轉速越大,且加在電機兩端的電壓方向不同,轉向也會不同。
3.2設計系統框圖
- 基于STM32的六足機器人的畢業設計文檔分享 17次下載
- 畢業設計--球上自平衡機器人
- 了解機器人電子教材下載 19次下載
- 基于單片機的智能小車畢業設計 99次下載
- 基于軟件無線電QPSK調制解調實現的研究畢業設計 42次下載
- 基于FPGA的數字時鐘設計畢業設計論文 73次下載
- 基于Matlab的機構與機器人分析資料下載 11次下載
- 智能汽車機器人的程序免費下載 4次下載
- 舞蹈機器人的PCB原理圖免費下載 34次下載
- NI畢業設計競賽獲獎論文簡介合集免費下載 26次下載
- Arduino教學機器人的使用教程免費下載 38次下載
- FANUC機器人的詳細使用教程免費下載 41次下載
- 機器人機械手畢業設計論文模板 32次下載
- 畢業設計文件 0次下載
- 優秀畢業設計論文推薦相關下載 0次下載
- 光伏組件智能清潔機器人設計方案 2730次閱讀
- 面對疫情 醫療機器人能幫上什么忙? 2126次閱讀
- dfrobotminiQ 4WD教育機器人介紹 2108次閱讀
- 工業機器人編程入門_工業機器人的編程要求 9571次閱讀
- 醫用機器人的定義_醫用機器人發展 3124次閱讀
- 醫用機器人的功能_醫用機器人分類 2229次閱讀
- 機器人控制器有哪些類型_機器人控制器發展 1.1w次閱讀
- 協作機器人的起源_為什么需要協作機器人 8127次閱讀
- 機器視覺的機器人取代四臺傳統的火焰處理機器人 3272次閱讀
- 如何區分機器人、協作機器人和移動機器人? 6828次閱讀
- 如何設計機器人處理器? 8030次閱讀
- 軟體機器人 前所未見的機器人 3692次閱讀
- 機器人的最佳編程語言是什么?機器人十大流行編程語言匯總 3.4w次閱讀
- 奧比中光正式發布應用于家庭機器人系統的Face ID應用 4859次閱讀
- 傳感器在機器人控制中的信息融合技術 1029次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1電子電路原理第七版PDF電子教材免費下載
- 0.00 MB | 1497次下載 | 免費
- 2單片機典型實例介紹
- 18.19 MB | 98次下載 | 1 積分
- 3S7-200PLC編程實例詳細資料
- 1.17 MB | 27次下載 | 1 積分
- 4筆記本電腦主板的元件識別和講解說明
- 4.28 MB | 18次下載 | 4 積分
- 5開關電源原理及各功能電路詳解
- 0.38 MB | 14次下載 | 免費
- 6100W短波放大電路圖
- 0.05 MB | 4次下載 | 3 積分
- 7藍牙設備在嵌入式領域的廣泛應用
- 0.63 MB | 3次下載 | 免費
- 8基于單片機的紅外風扇遙控
- 0.23 MB | 3次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234313次下載 | 免費
- 2PADS 9.0 2009最新版 -下載
- 0.00 MB | 66304次下載 | 免費
- 3protel99下載protel99軟件下載(中文版)
- 0.00 MB | 51209次下載 | 免費
- 4LabView 8.0 專業版下載 (3CD完整版)
- 0.00 MB | 51043次下載 | 免費
- 5555集成電路應用800例(新編版)
- 0.00 MB | 33564次下載 | 免費
- 6接口電路圖大全
- 未知 | 30321次下載 | 免費
- 7Multisim 10下載Multisim 10 中文版
- 0.00 MB | 28588次下載 | 免費
- 8開關電源設計實例指南
- 未知 | 21540次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537793次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420026次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234313次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191183次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183278次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138039次下載 | 免費





 工商網監
工商網監
評論