 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
介紹了一例非完整約束輪式移動機器人機械結構及控制系統軟硬件的設計。采用美國Cygnal公司新研制的C8051F005 單片機作為機器人控制系統的CPU 及瑞士MAXON 公司的直流伺服電機作為雙輪驅動單元,利用非完整約束條件和非完整約束運動規劃原理,研制了一例非完整約束輪式移動機器人,該機器人可跟蹤任意直線、圓弧曲線軌跡等,也可實現原地零半徑旋轉及任意軌跡運動。運動自主靈活。對直線及圓弧軌跡進行了跟蹤實驗。
目前,移動機器人已廣泛用于科學考察、地質勘探、災難營救等多個領域,對人類了解地球、征服自然、探索宇宙具有重要意義。同時,也是代替人們在有輻射、有粉塵和有毒等環境中作業必不可少的工具。移動機器人的典型行走形式有輪式、履帶式和腿足式等。
輪式移動機器人系統是典型的非完整約束機械系統。利用非完整約束條件和非完整運動規劃的原理,研究開發新型的具有良好的目標軌跡跟蹤和控制性能輪式移動機器人系統,在機器人領域下成為一個新的研究熱點。輪式機器人其實與車輛極為相似,因此對于輪式移動機器人的研究以及無人駕駛車輛的發展都有重大的意義。通過研制一臺輪式移動機器人AeroAcer ,對直線及圓弧等目標軌跡進行了跟蹤試驗。
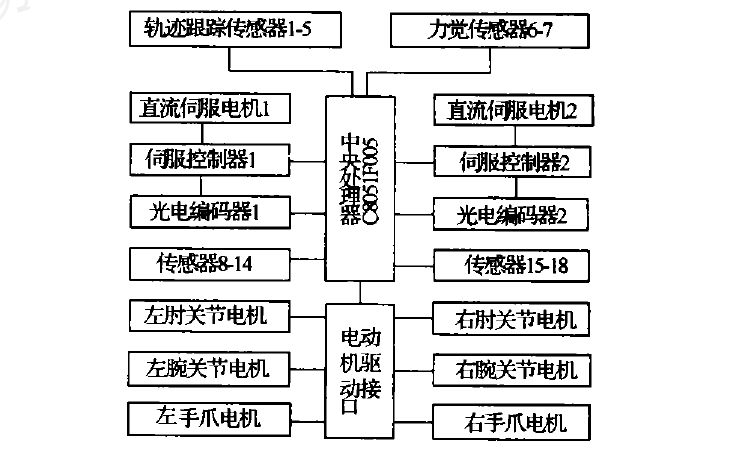
根據需要,AeroAcer 輪式移動機器人結構包括:行走驅動部、軀干、手臂及手爪。行走驅動部結構如圖1 所示,采用兩輪獨立驅動的結構,并使AeroAcer 的形心和質心對地平面的投影落于兩個驅動輪軸線上。驅動輪分別由兩套直流伺服系統驅動,提供需要的轉速或者力矩;前后對稱于驅動輪軸線各布置一萬向輪,可任意移動而不會對AeroAcer 產生阻力和約束作用,這樣,只要分別控制兩個驅動輪的不同的速度或者力矩,就可以使AeroAcer 按照所要求的方向和速度移動,從而實現運動規劃、穩定以及跟蹤等控制任務。驅動輪軸線經過底盤的形心的投影,可實現零轉彎半徑,同時也使軌跡規劃及控制相對簡單。另外,驅動輪軸線過質心的投影,可大大地提高驅動電機的效率。內帶減速齒輪的驅動電機固定在車架上,兩個驅動車輪也分別通過軸架固定在車架上。電機的輸出軸驅動車輪。連接在電機上的圓光柵在電機運轉時產生相位上相差90 度的脈沖信號,通過對此脈沖信號進行檢測和運算,就可得到AeroAcer 的位置、速度等狀態量。選用了500 線的圓光柵,即電動機每旋轉一周輸出500 個脈沖,由于采用33 :1 的減速齒輪,因此車輪每轉動一周圓光柵將輸出33 ×500 = 16500 個脈沖,具有相當高的精度。選擇圓光柵的目的在于:一方面將圓光柵產生的脈沖信號經過伺服放大器內的頻壓變換得到電機的速度用于速度反饋以形成速度閉環,同時還可以對脈沖信號經過計數、運算獲得AeroAcer 的位置和速度,簡化了系統設計,節省了成本。由于直流伺服電機具有啟動力矩大,動態性能好,調速范圍寬和控制較為簡單等一系列優點[2 ] 。因此在AeroAcer 中選用瑞士MAXON 公司的直流伺服電機作為驅動單元,包括帶有減速齒輪的直流電機、伺服放大器以及用作速度反饋和檢測的圓光柵。電機可以工作在速度方式和力矩方式,可以運行在由速度和加速度決定的四個象限,從而可以在該裝置上針對AeroAcer 的運動學和動力學模型進行實驗研究。其中,伺服放大器根據電機的轉速或電流調整輸出到電機的電壓,從而控制電機的轉速、力矩等。系統所使用的是ADS50/ 5 伺服放大器。
- 一種全新的輪式移動機器人軌跡跟蹤控制算法 11次下載
- 如何使用模糊PID的輪式移動機器人進行軌跡控制 35次下載
- 輪式移動機器人控制系統設計的設計論文資料免費下載 4次下載
- 如何使用Web移動機器人控制系統研究及Java實現資料說明 5次下載
- 輪式移動機器人運動控制研究現狀的介紹及其設計介紹 15次下載
- 移動機器人的分類與移動機器人技術研究現狀和未來發展的分析 13次下載
- 可載人自平衡移動機器人控制系統設計李京濤 0次下載
- 基于Arduino的移動機器人控制系統設計_彭攀來 5次下載
- 全自主移動機器人控制系統研究 0次下載
- 移動機器人及其控制系統研制 0次下載
- 輪式移動機器人WMR的運動分析 33次下載
- 基于無線局域網的移動機器人遠程控制系統
- 基于模糊PID的輪式移動機器人軌跡控制
- 基于車體加速度反饋的輪式移動機器人軌跡跟蹤控制研究
- 四輪式移動機器人非完整運動控制
- 基于ARM處理器和CPLD技術實現智能移動機器人系統設計 1047次閱讀
- 基于51單片機的自動巡線輪式機器人控制系統 4138次閱讀
- 移動機器人是如何定位的 4400次閱讀
- 移動機器人控制系統的發展方向? 1411次閱讀
- 移動機器人控制系統設計與仿真 3435次閱讀
- 嵌入式Linux移動機器人控制系統 4435次閱讀
- 仙知機器人自主研發用于移動機器人應用專業級客戶端軟件Roboshop 6069次閱讀
- 移動機器人的機構與分類分析 8065次閱讀
- 如何區分機器人、協作機器人和移動機器人? 6828次閱讀
- 基于PLC的機器人伺服運動控制系統設計詳解 1.5w次閱讀
- 基于嵌入式的輪式移動機器人設計方案 3612次閱讀
- 自主移動機器人的定位與地圖創建(SLAM)關鍵性問題 1908次閱讀
- 基于LPC2119的自主式移動機器人設計 1529次閱讀
- 基于FPGA技術的全方位移動機器人運動控制系統的方案設計 1176次閱讀
- 小生境遺傳算法的移動機器人路徑優化技術 1218次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1電子電路原理第七版PDF電子教材免費下載
- 0.00 MB | 1497次下載 | 免費
- 2單片機典型實例介紹
- 18.19 MB | 98次下載 | 1 積分
- 3S7-200PLC編程實例詳細資料
- 1.17 MB | 27次下載 | 1 積分
- 4筆記本電腦主板的元件識別和講解說明
- 4.28 MB | 18次下載 | 4 積分
- 5開關電源原理及各功能電路詳解
- 0.38 MB | 14次下載 | 免費
- 6100W短波放大電路圖
- 0.05 MB | 4次下載 | 3 積分
- 7藍牙設備在嵌入式領域的廣泛應用
- 0.63 MB | 3次下載 | 免費
- 8基于單片機的紅外風扇遙控
- 0.23 MB | 3次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234313次下載 | 免費
- 2PADS 9.0 2009最新版 -下載
- 0.00 MB | 66304次下載 | 免費
- 3protel99下載protel99軟件下載(中文版)
- 0.00 MB | 51209次下載 | 免費
- 4LabView 8.0 專業版下載 (3CD完整版)
- 0.00 MB | 51043次下載 | 免費
- 5555集成電路應用800例(新編版)
- 0.00 MB | 33564次下載 | 免費
- 6接口電路圖大全
- 未知 | 30321次下載 | 免費
- 7Multisim 10下載Multisim 10 中文版
- 0.00 MB | 28588次下載 | 免費
- 8開關電源設計實例指南
- 未知 | 21540次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537793次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420026次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234313次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191183次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183278次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138039次下載 | 免費





 工商網監
工商網監
評論