完善資料讓更多小伙伴認識你,還能領取20積分哦,立即完善>
標簽 > 激光雷達
激光雷達最大的優點在于它能直接提供距離信息。平常我們看到的照片或者視頻是一個平面,這是XY二維空間,但是駕駛員最關心是距離,即Z坐標,這就屬于三維。
激光雷達,是以發射激光束探測目標的位置、速度等特征量的雷達系統。其工作原理是向目標發射探測信號(激光束),然后將接收到的從目標反射回來的信號(目標回波)與發射信號進行比較,作適當處理后,就可獲得目標的有關信息,如目標距離、方位、高度、速度、姿態、甚至形狀等參數,從而對飛機、導彈等目標進行探測、跟蹤和識別。它由激光發射機、光學接收機、轉臺和信息處理系統等組成,激光器將電脈沖變成光脈沖發射出去,光接收機再把從目標反射回來的光脈沖還原成電脈沖,送到顯示器。
激光雷達,是以發射激光束探測目標的位置、速度等特征量的雷達系統。其工作原理是向目標發射探測信號(激光束),然后將接收到的從目標反射回來的信號(目標回波)與發射信號進行比較,作適當處理后,就可獲得目標的有關信息,如目標距離、方位、高度、速度、姿態、甚至形狀等參數,從而對飛機、導彈等目標進行探測、跟蹤和識別。它由激光發射機、光學接收機、轉臺和信息處理系統等組成,激光器將電脈沖變成光脈沖發射出去,光接收機再把從目標反射回來的光脈沖還原成電脈沖,送到顯示器。
激光雷達的原理
激光雷達工作原理也不難理解,就是發射和接收激光束。在激光雷達的內部,每一組組件都包含一個發射單元與接收單元。我們拿激光雷達領域最有名的公司Velodyne的旋轉鏡面設計圖來說明。
.jpg)
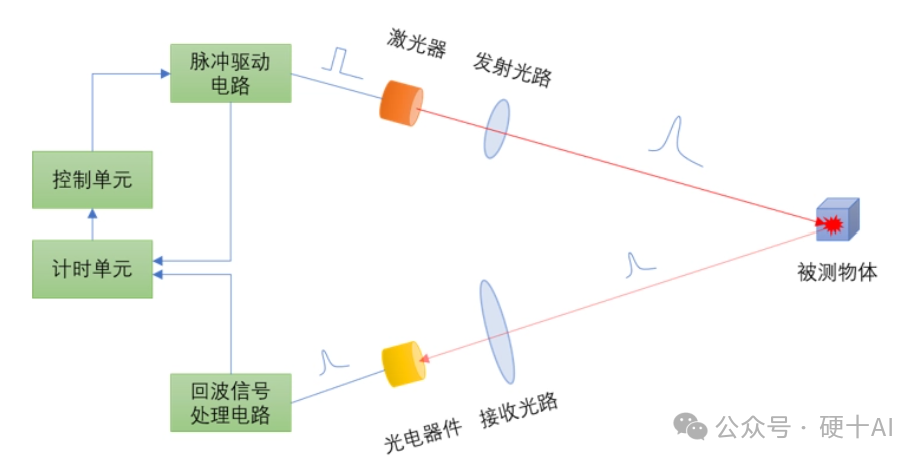
激光雷達工作原理
這套發射/接收組件和旋轉鏡面結合在一起,能掃描至少一個平面。鏡面不只反射二極管發出去的光,而且也能把反射回來的光再反射給接收器。通過旋轉鏡面,能夠實現 90到180度的視角,并且大大降低系統設計和制造的復雜度,因為鏡面是這里面唯一的運動機構。
探測距離的原理是基于光返回的時間,激光二極管發出脈沖光,脈沖光照射到目標物后反射一部分光回來,在二極管附近安裝一個光子探測器,它可以探測出返回來的信號,通過計算發射和探測的時間差就可以計算出目標物的距離。脈沖距離測量系統一旦被激活就能收集到大量的點云。
如果點云中有目標物,目標物就會在點云中呈現出一個陰影。通過這個陰影可以測量出目標物的距離和大小。通過點云可以生成周圍環境的3D圖像。點云密度越高,圖像越清晰。
激光雷達的優點
與普通微波雷達相比,激光雷達由于使用的是激光束,工作頻率較微波高了許多,因此帶來了很多優點,主要有:
(1)分辨率高
激光雷達可以獲得極高的角度、距離和速度分辨率。通常角分辨率不低于0.1mard也就是說可以分辨3km距離上相距0.3m的兩個目標(這是微波雷達無論如何也辦不到的),并可同時跟蹤多個目標;距離分辨率可達0.lm;速度分辨率能達到10m/s以內。距離和速度分辨率高,意味著可以利用距離——多譜勒成像技術來獲得目標的清晰圖像。分辨率高,是激光雷達的最顯著的優點,其多數應用都是基于此。
(2)隱蔽性好、抗有源干擾能力強
激光直線傳播、方向性好、光束非常窄,只有在其傳播路徑上才能接收到,因此敵方截獲非常困難,且激光雷達的發射系統(發射望遠鏡)口徑很小,可接收區域窄,有意發射的激光干擾信號進入接收機的概率極低;另外,與微波雷達易受自然界廣泛存在的電磁波影響的情況不同,自然界中能對激光雷達起干擾作用的信號源不多,因此激光雷達抗有源干擾的能力很強,適于工作在日益復雜和激烈的信息戰環境中。
(3)低空探測性能好
微波雷達由于存在各種地物回波的影響,低空存在有一定區域的盲區(無法探測的區域)。而對于激光雷達來說,只有被照射的目標才會產生反射,完全不存在地物回波的影響,因此可以“零高度”工作,低空探測性能較微波雷達強了許多。
(4)體積小、質量輕
通常普通微波雷達的體積龐大,整套系統質量數以噸記,光天線口徑就達幾米甚至幾十米。而激光雷達就要輕便、靈巧得多,發射望遠鏡的口徑一般只有厘米級,整套系統的質量最小的只有幾十公斤,架設、拆收都很簡便。而且激光雷達的結構相對簡單,維修方便,操縱容易,價格也較低。
激光雷達的缺點
首先,工作時受天氣和大氣影響大。激光一般在晴朗的天氣里衰減較小,傳播距離較遠。而在大雨、濃煙、濃霧等壞天氣里,衰減急劇加大,傳播距離大受影響。如工作波長為10.6μm的co2激光,是所有激光中大氣傳輸性能較好的,在壞天氣的衰減是晴天的6倍。地面或低空使用的co2激光雷達的作用距離,晴天為10—20km,而壞天氣則降至1 km以內。而且,大氣環流還會使激光光束發生畸變、抖動,直接影響激光雷達的測量精度。
其次,由于激光雷達的波束極窄,在空間搜索目標非常困難,直接影響對非合作目標的截獲概率和探測效率,只能在較小的范圍內搜索、捕獲目標,因而激光雷達較少單獨直接應用于戰場進行目標探測和搜索。
激光雷達的特點及用途
激光雷達的用途
直升機障礙物規避激光雷達
化學戰劑探測激光雷達
機載海洋激光雷達
成像激光雷達可水下探物
無人駕駛激光雷達
目前激光雷達的發展情況
劉博:從應用來看,激光雷達的種類繁多,可用于多種形式的探測。
最早成熟的激光雷達技術是用于探測臭氧、二氧化硫、氣溶膠等的大氣探測激光雷達。2016年,在天宮二號和神舟11號的交匯對接中,利用激光雷達在兩個航天器對接過程中測量相對位置、角度等,保證精準對接;還有我國發射的嫦娥三號上,在降落前用來掃描下方地貌,探測障礙物,這個屬于探測地形地障類的激光雷達。
近幾年,隨著人工智能的發展,自動駕駛、輔助駕駛的興起,推動了激光雷達在民用領域中的應用。
從技術原理來看,用于民用的激光雷達主要有兩種類型:
第一種是多束激光并排繞軸旋轉360o,每束激光掃描一個平面。早期的激光雷達為64線(即64束激光),那時已滿足自動駕駛的需求,但因成本高達7萬美元,未被市場接受。后來為了降低成本,有公司推出了32線、16線的激光雷達。但是成本的降低帶來的是分辨率的下降,這就容易在車輛駕駛過程中檢測障礙物時產生盲點,帶來安全隱患。
第二種是固態激光雷達。這種技術以美國Quanergy Systems公司的固態激光雷達傳感器S3為首,采用相控陣掃描方式,并不是常用的機械掃描方式。它不像第一種技術會產生機械運動,可以大幅降低生產成本。但目前技術并不成熟,離產品市場化還有一段距離。
有行業人士認為,中國五年內會改寫激光雷達的格局。您怎么看?
劉博:這是一個比較樂觀的宣傳。激光雷達最大的優點在于它能直接提供距離信息。平常我們看到的照片或者視頻是一個平面,這是XY二維空間,但是駕駛員最關心是距離,即Z坐標,這就屬于三維。

國內已有企業正在合作研究自動駕駛激光雷達,也有一些公司推出了產品,但是實際應用效果如何,目前尚未看到成效。我國用于自動駕駛的激光雷達的研究處于剛剛起步的階段。
自動駕駛的最大賣點在于可以把道路駕駛的事故率理論上降到零。因為自動駕駛都是由計算機控制的,如果系統不出現故障,那么他就會嚴格遵守交通規則,不會出現走神、酒駕等狀況。但是一旦出現問題,例如之前的特斯拉事件,就會對自動駕駛造成很大的打擊。
激光雷達的光源有三種:二氧化碳激光器、半導體激光器和全固態激光器。您認為哪種激光器光源最有前途?
劉博:肯定是半導體激光器作為光源潛力最大。因為半導體激光器尺寸可以做到很小,成本比較低,符合作為汽車配置的需求。現在我們看到的安裝在無人駕駛車頂的那些激光雷達,例如Velodyne,最早并不是為自動駕駛而設計的,只不過自動駕駛正好用到了其中的一些功能,例如360o掃描。

百度無人駕駛測試車使用了Velodyne的64線激光雷達
我認為,真正實用化后,這些都應該集成到汽車的內部,例如集成到車燈的位置,半導體激光器恰巧可以滿足這一條件。我相信最終成熟的樣式也一定是這樣的。
國產激光雷達與國外差距有多大
劉博:從技術上來說,我國民用激光雷達與國外技術相比并沒有太多差距。差距可能是在產業化和研發等方面,或者說別人早走了一段時間,而我國剛剛開始做。
我曾與國內很多專家聊過。嚴格來說,現在市場上的激光雷達沒有一款是在誕生之初就專為自動駕駛優化設計的。國內很多激光雷達廠家生產的產品外形和性能都是模仿美國Velodyne公司產品的設計。然而Velodyne公司早期主營音響業務,后技術升級,才開發了激光雷達技術LiDAR并名聲大噪。但是它有些指標超出了普通汽車的要求,帶來了高成本,而有些必需的指標又沒有達到。
其實,我現在課題組正在做的工作之一就是從實際應用出發設計激光雷達系統。從2016年開始我們正在從事這個方向的研究,并與最終用戶和一些車主進行了廣泛溝通,了解他們的需求。我們希望推出一款純粹為了自動駕駛而優化設計的激光雷達。這樣的話能節省的地方盡量節省,降低成本,不能節省的地方,提高指標,提升安全性。
激光雷達技術推廣到民用階段還需要多久的時間
劉博:應該用不了太久。根據“2016中國汽車工程學會年會”正式公開的節能與新能源汽車技術路線圖的規劃,智能網聯汽車的市占率將實現2020年駕駛輔助與部分自動駕駛市占率50%,2025年高度自動駕駛市占率15%,2030年完全自動駕駛市占率10%。我認為,5年內市場上會推出各種各樣針對自動駕駛的激光雷達產品。
您認為激光雷達的市場前景如何
劉博:激光雷達的市場非常大,而且很多同仁都在從事該領域的研究和開發。其實激光雷達最大的市場并不是自動駕駛領域,而是用在服務類機器人的機器視覺上。無人機、服務類機器人,還有一些娛樂項目中進行距離傳感捕捉的,這些方面的激光雷達市場會更大。目前國內的一些高校、科研院所以及百度、華為等大型IT公司,產學研企都在研究。
我認為最終產品的開發模式,還是應遵循研發端、用戶端與市場,三方緊密結合,從最初的設計入手,這樣推出的產品才能平衡各方所需,發揮它的最大價值。


混沌激光雷達具有分辨率高、抗干擾和隱蔽性強的優點,然而受限于混沌光源的功率、線性探測器的靈敏度以及硬件帶寬,其在遠距離探測方面存在瓶頸。另外,單光子探測...

一、文章概述 1.1 摘 要 即時定位與地圖構建(simultaneous localization and mapping,SLAM)是自主移動機器人...
激光雷達是一種以發射激光束來探測目標位置、速度等特征量的雷達系統。 這個系統也可以通過掃描發射和接收裝置來獲取目標物體的三維形狀,在不同角度發射和接收激...
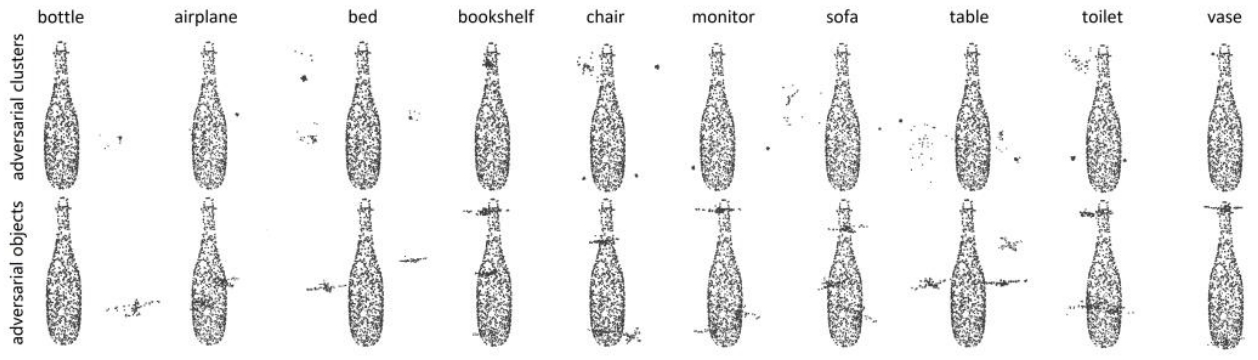
鑒源實驗室·如何通過雷達攻擊自動駕駛汽車-針對點云識別模型的對抗性攻擊的科普
01 引 言 隨著自動駕駛技術的迅速發展,雷達和激光雷達等傳感器在自動駕駛汽車中的作用愈發重要。它們能夠生成3D點云數據,幫助車輛實時感知周圍環境并做出...

物聯網系統中為什么要使用純固態激光雷達 物聯網系統中使用純固態激光雷達的原因主要基于其獨特的優勢和應用價值,這些優勢使得純固態激光雷達在物聯網的多個領域...
LIDAR激光雷達逆向建模是一種利用激光雷達技術獲取物體表面數據,然后通過計算機軟件進行建模的方法。在建筑行業中,這種方法可以用于建筑物的三維建模、結構...
光學雷達和激光雷達是兩種不同的遙感技術,它們在原理、應用、優缺點等方面都存在一定的差異。以下是對光學雷達和激光雷達的比較: 定義和原理 光學雷達(Opt...
激光雷達(LiDAR)是一種利用激光技術進行距離測量的遙感技術。它通過發射激光脈沖并接收反射回來的光束,來測量物體與激光雷達系統之間的距離。激光雷達廣泛...
LiDAR(Light Detection and Ranging,激光探測與測距)是一種利用激光技術進行距離測量和成像的技術。LiDAR激光雷達掃描儀...
LiDAR傳感器和激光測距傳感器是兩種不同類型的傳感器,它們在原理、應用和性能方面存在一些區別。 原理區別 LiDAR傳感器(Light Detecti...

隨著科技的飛速發展,低空經濟已成為全球經濟增長的新引擎。從無人機導航與避障、低空空域管理,到無人機測繪、物流與配送,再到低空安防與監測、災害應急與救援,...
? SLAM 背后的核心思想是讓機器人或自主系統能夠探索未知環境并創建該環境的地圖,同時確定其在生成的地圖中的位置。這是通過融合來自各種傳感器(例如激光...

“公司前三季度收入的同比下降主要源于一季度的業績壓力,但后續情況已有所改善。”在11月13日舉行的2024年第三季度業績說明會上,長光華芯董事長、總經理...
隨著不同大模型在語言理解及生成等領域的出色表現,大模型別后的規模規律不斷強化數據在要提升AI性能上的關鍵作用,AI數據服務可加速高質量數據的獲取與標注,...
近期,禾賽在各大權威獎項評選中脫穎而出,接連斬獲 鈴軒獎前瞻金獎 、 金輯獎中國汽車新供應鏈百強 、證券之星優秀上市公司獎三大行業重磅獎項。這些榮譽不僅...

展館展位指引展館地址:珠海國際航展中心(廣東省珠海市金灣區金海中路777號)展位號:12號館H12S13觀展時間專業日11月12日-14日0900公眾日...
據《紐約郵報》11月8日消息,勝選后特朗普加強了海湖莊園的安防細節:增加了一只美國特勤局的機器狗——照片顯示這只四條腿的機器狗正在草坪上巡邏。機器狗身上...
今日,全球領先的激光雷達研發與制造企業禾賽科技(納斯達克:HSAI)宣布與長安汽車加深合作關系,進一步驅動智駕升級。禾賽科技作為長安汽車自主研發 SDA...

單光子激光雷達(Single-Photon LiDAR,SPL)是一種在眾多領域都受到廣泛歡迎的尖端遙感技術。

激光雷達廠商速騰聚創與廣汽埃安達成合作,獲得多款車型全新定點
據傳感器專家網獲悉,速騰聚創官方公眾號日前宣布,與廣汽埃安達成戰略合作,并獲得廣汽埃安多款車型的全新定點項目。 廣汽埃安總經理古惠南表示:希望能夠短期內...
 換一批
換一批
編輯推薦廠商產品技術軟件/工具OS/語言教程專題
| 電機控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機 | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機 | PID | MOSFET | 傳感器 | 人工智能 | 物聯網 | NXP | 賽靈思 |
| 步進電機 | SPWM | 充電樁 | IPM | 機器視覺 | 無人機 | 三菱電機 | ST |
| 伺服電機 | SVPWM | 光伏發電 | UPS | AR | 智能電網 | 國民技術 | Microchip |
| 開關電源 | 步進電機 | 無線充電 | LabVIEW | EMC | PLC | OLED | 單片機 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 藍牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太網 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 語音識別 | 萬用表 | CPLD | 耦合 | 電路仿真 | 電容濾波 | 保護電路 | 看門狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 閾值電壓 | UART | 機器學習 | TensorFlow |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關注我們的微信

下載發燒友APP

電子發燒友觀察

版權所有 ? 湖南華秋數字科技有限公司
長沙市望城經濟技術開發區航空路6號手機智能終端產業園2號廠房3層(0731-88081133)
電子發燒友 (電路圖) 湘公網安備43011202000918 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1