完善資料讓更多小伙伴認識你,還能領取20積分哦,立即完善>
標簽 > 照相機
照相機是一種利用光學成像原理形成影像并使用底片記錄影像的設備,是用于攝影的光學器械。在現代社會生活中有很多可以記錄影像的設備,它們都具備照相機的特征,比如醫學成像設備、天文觀測設備等。
照相機是一種利用光學成像原理形成影像并使用底片記錄影像的設備,是用于攝影的光學器械。在現代社會生活中有很多可以記錄影像的設備,它們都具備照相機的特征,比如醫學成像設備、天文觀測設備等。被攝景物反射出的光線通過照相鏡頭(攝景物鏡)和控制曝光量的快門聚焦后,被攝景物在暗箱內的感光材料上形成潛像,經沖洗處理(即顯影、定影)構成永久性的影像,這種技術稱為攝影術,分為一般照相與專業攝像。
照相機是一種利用光學成像原理形成影像并使用底片記錄影像的設備,是用于攝影的光學器械。在現代社會生活中有很多可以記錄影像的設備,它們都具備照相機的特征,比如醫學成像設備、天文觀測設備等。被攝景物反射出的光線通過照相鏡頭(攝景物鏡)和控制曝光量的快門聚焦后,被攝景物在暗箱內的感光材料上形成潛像,經沖洗處理(即顯影、定影)構成永久性的影像,這種技術稱為攝影術,分為一般照相與專業攝像。
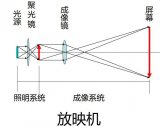
工作原理
照相機品種繁多,按用途可分為風光攝影照相機、印刷制版照相機、文獻縮微照相機、顯微照相機、水下照相機、航空照相機、高速照相機等;按照相膠片尺寸,可分為110照相機(畫面13×17毫米)、126照相機(畫面28×28毫米)、135照相機(畫面24×18,24×36毫米)、127照相機(畫面45x45毫米)、120照相機(包括220照相機,畫面60×45,60×60,60×90毫米)、圓盤照相機(畫面8.2x10.6毫米);按取景方式分為透視取景照相機、雙鏡頭反光照相機、單鏡頭反光照相機。任何一種分類方法都不能包括所有的照相機,對某一照相機又可分為若干類別,例如135照相機按其取景、快門、測光、輸片、曝光、閃光燈、調焦、自拍等方式的不同 ,就構成一個復雜的型譜。照相機利用光的直線傳播性質和光的折射與反射規律,以光子為載體,把某一瞬間的被攝景物的光信息量,以能量方式經照相鏡頭傳遞給感光材料,最終成為可視的影像。照相機的光學成像系統是按照幾何光學原理設計的,并通過鏡頭,把景物影像通過光線的直線傳播、折射或反射準確地聚焦在像平面上。攝影時,必須控制合適的曝光量,也就是控制到達感光材料上的合適的光子量。因為銀鹽感光材料接收光子量的多少有一限定范圍,光子量過少形不成潛影核,光子量過多形成過曝,圖像又不能分辨。照相機是用光圈改變鏡頭通光口徑大小,來控制單位時間到達感光材料的光子量,同時用改變快門的開閉時間來控制曝光時間的長短。從完成攝影的功能來說,照相機大致要具備成像、曝光和輔助三大結構系統。成像系統包括成像鏡頭、測距調焦、取景系統、附加透鏡、濾光鏡、效果鏡等;曝光系統包括快門機構、光圈機構、測光系統、閃光系統、自拍機構等;輔助系統包括卷片機構、計數機構、倒片機構等。鏡頭是用以成像的光學系統,由一系列光學鏡片和鏡筒所組成,每個鏡頭都有焦距和相對口徑兩個特征數據;取景器是用來選取景物和構圖的裝置,通過取景器看到的景物,凡能落在畫面框內的部分,均能拍攝在膠片上 ;測距器可以測量出景物的距離,它常與取景器組合在一起,通過連動機構可將測距和鏡頭調焦聯系起來,在測距的同時完成調焦。光學透視或單鏡頭反光式取景測距器都須手動操作,并用肉眼判斷。此外還有光電測距、聲納測距、紅外線測距等方法,可免除手動操作,又能避免肉眼判斷帶來的誤差,以實現自動測距。快門是控制曝光量的主要部件,最常見的快門有鏡頭快門和焦平面快門兩類。鏡頭快門是由一組很薄的金屬葉片組成,在主彈簧的作用下,連桿和撥圈的動作使葉片迅速地開啟和關閉 ;焦平面快門是由兩組部分重疊的簾幕(前簾和后簾)構成,裝在焦平面前方附近。兩簾幕按先后次序啟動,以便形成一個縫隙。縫隙在膠片前方掃過,以實現曝光。光圈又叫光闌,是限制光束通過的機構,裝在鏡頭中間或后方。光圈能改變光路口徑,并與快門一起控制曝光量。常見的光圈有連續可變式和非連續可變式兩種。自拍機構是在攝影過程中起延時作用,以供攝影者自拍的裝置。使用自拍機構時,首先釋放延時器,經延時后再自動釋放快門。自拍機構有機械式和電子式兩種,機械式自拍機構是一種齒輪傳動的延時機構,一般可延時8~12秒 ;電子式自拍機構利用一個電子延時線路控制快門釋放。[2]
結構和元件
通常,照相機主要元件包括:成像元件、暗室、成像介質與成像控制結構。成像元件可以進行成像。通常是由光學玻璃制成的透鏡組,稱之為鏡頭。小孔、電磁線圈等在特定的設備上都起到了“鏡頭”的作用。成像介質則負責捕捉和記錄影像。包括底片、CCD、CMOS等。暗室為鏡頭與成像介質之間提供一個連接并保護成像介質不受干擾。控制結構可以改變成像或記錄影像的方式以影像最終的成像效果。光圈、快門、聚焦控制等。[2]
成像過程
傳統相機成像1.鏡頭把景物影象聚焦在膠片上2、片上的感光劑隨光發生變化3.片上受光后變化了的感光劑經顯影液顯影和定影4. 形成和景物相反或色彩互補的影象5. 所形成的像是實像[2]
數碼相機成像1.經過鏡頭光聚焦在CCD或CMOS上2.CCD或CMOS將光轉換成電信號3.經處理器加工,記錄在相機的內存上4.通過電腦處理和顯示器的電光轉換,或經打印機打印便形成影象。具體過程:光線從鏡頭進入相機,CCD進行濾色、感光(光電轉化),按照一定的排列方式將拍攝物體“分解”成了一個一個的像素點,這些像素點以模擬圖像信號的形式轉移到“模數轉換器”上,轉換成數字信號,傳送到圖像處理器上,處理成真正的圖像,之后壓縮存儲到存儲介質中。對膠片相機而言,景物的反射光線經過鏡頭的會聚,在膠片上形成潛應影,這個潛影是光和膠片上的乳劑產生化學反應的結果。再經過顯影和定影處理就形成了影像。數碼相機是通過光學系統將影像聚焦在成像元件CCD/ CMOS 上,通過A/D轉換器將每個像素上光電信號轉變成數碼信號,再經DSP處理成數碼圖像,存儲到存儲介質當中。

HDR是英文High Dynamic Range的縮寫,指的是高動態范圍。對于照相機或是電視等顯示設備來說,它能夠提供比傳統技術更廣泛的亮度范圍和更好的...

相對于宏觀物體來說,微觀世界的物質(原子、分子)運動的速度更快,為了研究這種運動,科學家們發明了飛秒激光,光脈沖的持續時間短至10-15秒,我們終于可以...
透射電鏡圖像分為試樣的顯微像和衍射花樣,這兩種像分別為不同電子成像,前者是透射電子成像,后者為散射電子成像。

所有的攝像機鏡頭均是螺紋口的,CCD攝像機的鏡頭安裝有兩種工業標準,即C安裝座和CS安裝座。兩者螺紋部分相同,但兩者從鏡頭到感光表面的距離不同。
一般的化學反應是在經過能量高的中間狀態,即所謂的“活性化狀態”后進行。活性化狀態的存在早在1889年已由化學家阿雷尼厄斯從理論上預言,但是因為是在極短瞬...
標準鏡頭的焦距以相機成像面的畫 幅對角線長度為準,當鏡頭焦距接近某 類相機成像面的畫幅對角線長度時被稱 為該類相機的標準焦距鏡頭,簡稱標準 鏡頭或標頭。...
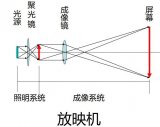
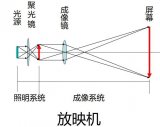
投影儀的關鍵參數 亮度:家用一般 2000-3000 ANSI 流明(輻射光學部分細講) 標準分辨率(真實分辨率或物理分辨率) 對比度:明暗區域最亮的白...
標準鏡頭的焦距以相機成像面的畫 幅對角線長度為準,當鏡頭焦距接近某 類相機成像面的畫幅對角線長度時被稱 為該類相機的標準焦距鏡頭,簡稱標準 鏡頭或標頭。
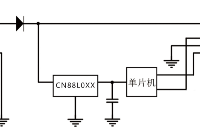
當前文章介紹基于STM32設計的門禁照相機,本項目提供了一種更加智能、安全、便捷的門禁解決方案。門禁照相機采用STM32F103ZET6 MCU作為主控...

基于Hi3516開發板,使用OpenHarmony3.0-LTS開發的應用。通過獲取攝像頭數據,實現預覽拍照以及路視頻等功能。并且通過后臺AI服務識別喚...
2024-04-18 標簽:照相機鴻蒙OpenHarmony 405 0
STM32F20x系列是基于工作頻率高達120MHz的高性能ARM?Cortex?-M3 32位RISC內核。 該系列整合了高速嵌入式存儲器,Flas...

拼經濟、拓市場。上周,成都36家企業組團“出海”,飛赴德國法蘭克福,搶抓海外訂單。參與此次“出海”活動的36家企業,經成都市經信局前期公開征集,分別來自...

引言 所謂3D視覺定位指的是根據事先構建的3D模型及相關信息,計算取得某張圖像在拍攝時相機的位置和姿態。這是3D視覺的一項十分重要的技術,可以用來幫助實...
數碼照相機3D模型H5三維建模vr線上展示運用三維技術打造真實、立體、360度/720度展示照相機產品以及對客戶推送沉浸式的照相機數碼產品體驗。商迪3D...
10月14日,佳能發布單眼望遠照相機PowerShot ZOOM。它是一款新概念相機,適用于遠距離拍攝。
BQM-34型無人機采用了中單翼帶尾翼的正常氣動布局,發動機位于機腹靠前部位,進氣口在飛機下頜處,整個飛機起來很像一架取消了駕駛艙的T-2“橡樹”教練機...
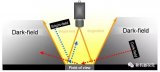
機器視覺檢測對于消除瑕疵,模糊,碎屑或凹陷等產品缺陷,以確保產品的功能和性能至關重要。因此已經被廣泛用于各大行業的產品缺陷檢測、尺寸檢測中。如利用視覺系...
據消息報道,微軟已申請了一項被稱為“深度多光譜”相機的專利。該專利有望用于未來的Surface設備上,包括Surface Duo和Neo。據介紹,微軟研...
深圳海關關稅處介紹,“無人機”如果按照“帶照相機的飛行器”歸類,就必須按“飛行器”進行監管,這樣一來各國的貿易管制條件會比較嚴格,容易形成非關稅貿易壁壘...
 換一批
換一批
編輯推薦廠商產品技術軟件/工具OS/語言教程專題
| 電機控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機 | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機 | PID | MOSFET | 傳感器 | 人工智能 | 物聯網 | NXP | 賽靈思 |
| 步進電機 | SPWM | 充電樁 | IPM | 機器視覺 | 無人機 | 三菱電機 | ST |
| 伺服電機 | SVPWM | 光伏發電 | UPS | AR | 智能電網 | 國民技術 | Microchip |
| 開關電源 | 步進電機 | 無線充電 | LabVIEW | EMC | PLC | OLED | 單片機 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 藍牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太網 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 語音識別 | 萬用表 | CPLD | 耦合 | 電路仿真 | 電容濾波 | 保護電路 | 看門狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 閾值電壓 | UART | 機器學習 | TensorFlow |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關注我們的微信

下載發燒友APP

電子發燒友觀察

版權所有 ? 湖南華秋數字科技有限公司
長沙市望城經濟技術開發區航空路6號手機智能終端產業園2號廠房3層(0731-88081133)
電子發燒友 (電路圖) 湘公網安備43011202000918 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1