完善資料讓更多小伙伴認識你,還能領取20積分哦,立即完善>
標簽 > CANopen

CANopen是一種架構在控制局域網路(Controller Area Network, CAN)上的高層通信協協議,包括通信子協議及設備子協議,常在嵌入式系統中使用,也是工業控制常用到的一種現場總線。
CANopen是一種架構在控制局域網路(Controller Area Network, CAN)上的高層通信協協議,包括通信子協議及設備子協議,常在嵌入式系統中使用,也是工業控制常用到的一種現場總線。
總述
CANopen是一種架構在控制局域網路(Controller Area Network, CAN)上的高層通訊協定,包括通訊子協定及設備子協定常在嵌入式系統中使用,也是工業控制常用到的一種現場總線。
CANopen 實現了OSI模型中的網絡層以上(包括網絡層)的協定。CANopen 標準包括尋址方案、數個小的通訊子協定及由設備子協定所定義的應用層。 CANopen 支援網絡管理、設備監控及節點間的通訊,其中包括一個簡易的傳輸層,可處理資料的分段傳送及其組合。一般而言數據鏈結層及物理層會用CAN來實作。除了 CANopen 外,也有其他的通訊協定(如EtherCAT)實作 CANopen 的設備子協定。
CANopen由非營利組織CiA(CAN in Automaion)進行標準的起草及審核工作,基本的 CANopen 設備及通訊子協定定義在 CAN in Automation (CiA) draft standard 301中。針對個別設備的子協定以 CiA 301 為基礎再進行擴充。如針對 I/O 模組的 CiA401 及針對運動控制的 CiA402。
CANopen是一種架構在控制局域網路(Controller Area Network, CAN)上的高層通信協協議,包括通信子協議及設備子協議,常在嵌入式系統中使用,也是工業控制常用到的一種現場總線。
總述
CANopen是一種架構在控制局域網路(Controller Area Network, CAN)上的高層通訊協定,包括通訊子協定及設備子協定常在嵌入式系統中使用,也是工業控制常用到的一種現場總線。
CANopen 實現了OSI模型中的網絡層以上(包括網絡層)的協定。CANopen 標準包括尋址方案、數個小的通訊子協定及由設備子協定所定義的應用層。 CANopen 支援網絡管理、設備監控及節點間的通訊,其中包括一個簡易的傳輸層,可處理資料的分段傳送及其組合。一般而言數據鏈結層及物理層會用CAN來實作。除了 CANopen 外,也有其他的通訊協定(如EtherCAT)實作 CANopen 的設備子協定。
CANopen由非營利組織CiA(CAN in Automaion)進行標準的起草及審核工作,基本的 CANopen 設備及通訊子協定定義在 CAN in Automation (CiA) draft standard 301中。針對個別設備的子協定以 CiA 301 為基礎再進行擴充。如針對 I/O 模組的 CiA401 及針對運動控制的 CiA402。
CANopen優勢概述
1.物理層非常穩定;2. 數據鏈路層可靠,因為相比其他所有總線,只有CAN可以做到達到漢明間距(Hamming Distanz)為6,能夠檢測報文里多達5個隨機引入的位錯誤及15位突發性錯誤。3. 靈活,兼容性高;4. 可互操作性高;5. 價格低 (對于設備生產商來說);6. CAN產品尺寸小,節省空間;7.支持冗余備用
CANopen 基礎
1. TPDO和RPDO都是針對從站來說的,協議上沒有有講任何一個關于主站的概念,協議就只是定義從站,沒有定義主站任何東西。
TPDO:從站-》主站
RPDO:主站-》從站
2. PDO的COB-ID是用來唯一標識一個PDO報文的,不同的PDO設置不同的COB-ID。
3. 主站和從站的通信過程基本是這樣的:
a.主站檢測從站是否在線;
b.在線的話開始通過SDO配置從站;
c.配置成功,則發送一個NMT start remote node指令讓從站進入Operation狀態,開始PDO的通信。
4. CANopen所定義的所有Object都是要在從站上實現的,只是數值是由主站在開始PDO傳輸前通過SDO寫入的。
5. 標識符正如其名,是CAN幀的一個標識,CANopen使用了這個標識符,并且把它定義為COB-ID,規定了高四位為功能碼,低7位為節點ID,但是,CANopen并沒有規定每個節點發出的所有幀都必須帶上自己的ID,也沒有規定接收的幀都必須跟自己的ID匹配,所以從根上說,COB-ID還是標識符的作用,它只是被規劃了一下含義,舉兩個例子:PDO,COB-ID的組成即可以是發送方ID也可以是接收方ID,看你方便和具體使用規律;SDO,規定了使用server的ID來溝通。CANopen的預定義連接集是比較糾結,描述的不夠清晰。
6. Heartbeat并不分主站和從站,僅是一種斷線檢測機制,主站可以發給從站,從站也可以發給主站,看用戶的需求,一般的主站配置軟件都可以設置主站或從站是否要監控對方的在線狀態。
支持heartbeat的從站,都有1016和1017兩個參數,1017的數值表示從站送出heartbeat報文的間隔時間,1016表示從站監控主站或其它從站的超時時間(如果從站支持,可以同時監控主站或其它從站的在線狀態,根據應用需求而定),所以1016是一個數組型的參數。
當主站在consumer的時間內沒有收到從站的Heartbeat(producer時間間隔發送),那么認為從站掉線。
7. 實現CANOPEN的步驟:
① CANopen 協議體系的實現;
② CANopen 相應開發和配置工具的實現。
第2 階段主要完成CANopen 標準開發工具的開發,開發過程可以分為 2 個步驟:第1 個步驟是EDS 和DCF 配置工具的開發;第2 個步驟是開發實現對象字典的工具。
實現對象字典的過程是:將EDS和DCF用“文件轉化工具”轉化為“內部實現描述(XML)”,再用“目標配置代碼工具”從而實現對象字典。
EDS就是提供從站的一些默認的參數值給主站的組態軟件,供用戶配置從站的時候使用,EDS不是必須的,但大多數的主站配置軟件都需要,有些主站軟件也不需要EDS文件,比如Bechkoff的主站就不需要從站提供EDS文件。
8. 一般每個節點既可以作為server又可以作為client,server向client開放自己的OD供訪問,兩者的parameter都存放在設備唯一的OD中。
9. 不同的傳輸類型支持幾種不同的數據傳輸方式:
① 同步觸發,由同步幀觸發,以同步整個網絡數據,不同的數據頻率通過設置不同的同步數實現。
② 事件觸發。
③ 內部定時觸發(也可以歸到事件觸發) 。
10. 同步PDO的實際意義與應用場合
應用程序刷進對象字典時間和頻率都是由編程人員自行確定的,你可以根據PDO的類型自行確定,比如每隔5個sync的時間刷新一次對象內容,這樣數據的新鮮程度是5個sync,如果要求更進一步的新鮮程度,你可以在刷新對象內容后直接觸發一幀PDO。
同步PDO在實際應用中的優勢:很多,提供一致的系統節拍,使得總線的數據盡量保證新鮮程度的同時,能夠減少通訊量,合理的規劃總線占用率。比如總線分布式的控制回路,怎樣保證控制周期的準確性和數據的有效性呢?
同步傳輸的最重要應用是多軸同步控制,沒有這種同步機制,多軸傳動功能是沒有辦法實現的。
PDO只是個載體,或者說它好比一輛貨車,車廂里裝什么貨,是可以配置的,這些由PDO映射來完成,PDO映射用來指定把對象字典的那些對象裝進PDO,或者從接收的PDO中將數據放到那些對象中。
SYNC周期是恒定的,它基本上就是系統通信部分的節拍了,節拍亂了,一切都是浮云了。
11.CAN及CANOPEN通訊協議大全
12. 移植canfestival到ARM上的步驟:
1)在學習移植CANopen之前要先熟悉CAN,能夠使用CAN進行節點間的通信設計。
2)熟悉CAnopen協議,通讀一遍301協議,并且結合國內的一些介紹性資料了解一下CAnopen的結構、定位和工作方式。
3)結合一些較簡單的協議棧代碼,比如置頂的兩套小代碼,能夠讀懂一個,明白運行過程,最好能移植到你的硬件上試一下,畢竟它的代碼量較之CANFestival要小的多。
4)準備移植CANFestival,先在你熟悉和有條件實驗的平臺下,比如x86的windows下試著編譯運行CANFestival(我記得有window的vc工程可以編譯的)。熟悉和理解CANFestival,最后再把CANFestival移植到你的目標平臺,可能會需要編寫硬件接口驅動的。
13. 心跳報文是單向的,一般的主站都可以提供配置的方法,你可以讓主站監控從站是否斷線,也可以讓從站監控主站是否斷線,或者兩個一起互相監控。
14. 一般的主站都需要一個配套的配置軟件,我們習慣叫網絡組態軟件(Configuration tool software),讓用戶可以根據自己的需求來對網絡進行配置。
15. 同步和異步,是針對不同的應用需求定義的方式,如果你的控制在各個從站間不需要配合,其實異步是比較科學的方式,一般同步都是運動控制中使用。
16. EDS文件只是一個具有可讀性的設備對象字典的描述,設備實際的對象字典,是對它的軟件實現,即設備實現了這個EDS所描述的對象字典,如果從站資料里面EDS文件支持讀寫,而實際訪問卻不可寫,要么是從站沒按照這個對象字典實現,要么是有其它的條件開啟寫入功能,比如物理開關或者參數開關。最好還是詳細閱讀一下從站的資料,也可以咨詢該設備的供應商。
17. dummy在CANOPEN里原本的意思是空的,沒有意義的對象,用來占用PDO的數據,以達到調整PDO數據結構的目的。你基本上可以理解它的作用是會占用PDO的數據區,但不起作用。


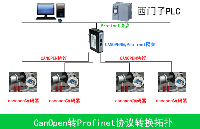
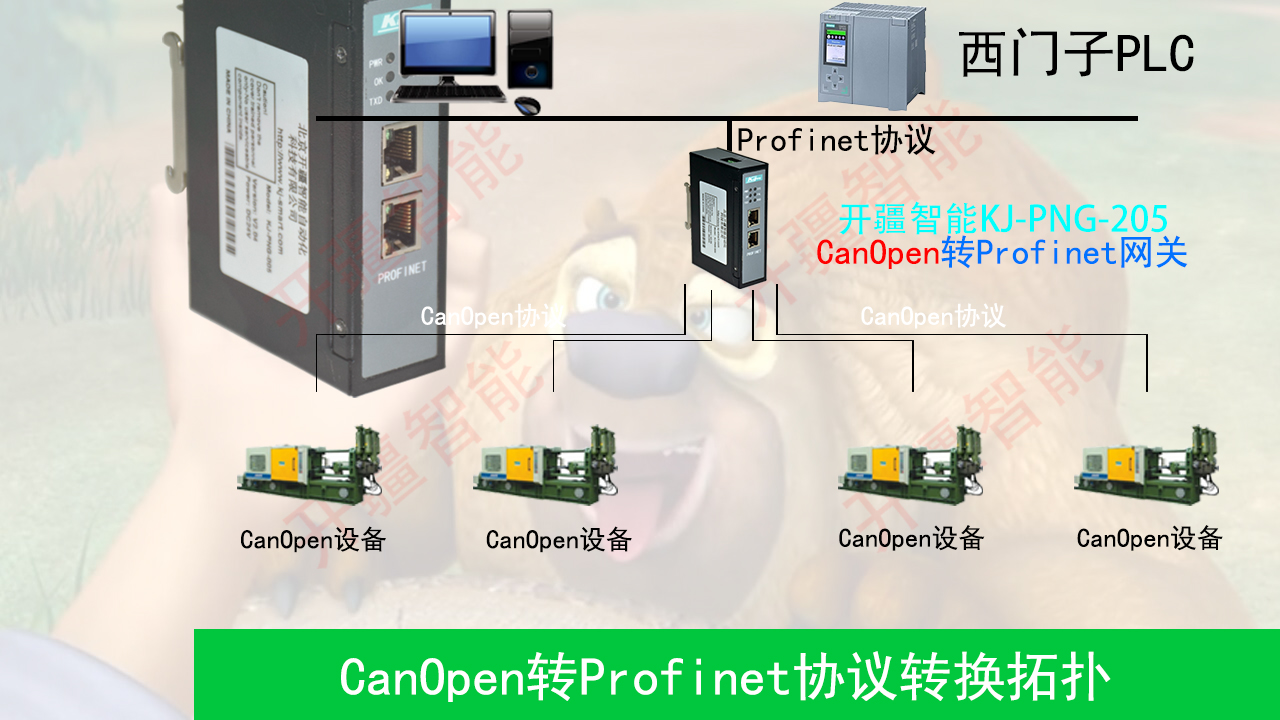
必看!Profinet轉CANopen網關在連接伺服配置中的精彩應用案例
在工業自動化的現場,我們經常需要將不同的設備和系統進行連接和配置。今天,我們將以一個實際的案例來展示如何利用開疆智能Profinet轉CanOpen網關...

Ixxat產品案例--通過CAN-IB卡和CANopen協議進行伺服控制器通信
電子產品生產的精度和速度:Ixxat的CAN-IB600/PCIe可確保對分配器單元的可靠控制,解決通信問題并提高效率。分配器的速度和精度:PC接口和C...

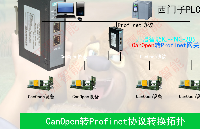
Profinet轉CanOpen網關連接與CanOpen協議磁軌道實現高效連接
項目旨在展示如何通過開疆智能Profinet轉Canopen網關實現西門子1200PLC與磁軌道之間的連接。以下是項目實施的步驟概要:安裝必要的GSD文...
穩健的通信協議和接口在工業電機控制應用中發揮著重要作用。在工業驅動應用中,當需要多個處理器元件來持續通信以完成復雜任務時,CANopen因其易于集成、高...

智能橋梁:Profinet轉CanOpen網關,臺達伺服無縫對接
在工業自動化領域,將西門子S7-1200系列PLC與具備CANOPEN通訊功能的伺服驅動器設備集成時,由于PLC默認采用PROFINET實時以太網通訊協...

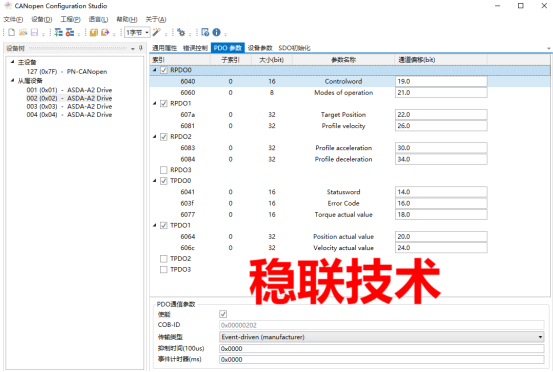
本期,我們將探討CANopen協議中TPDO的三種觸發條件,并解釋如何通過訪問特定的SDO參數來查詢TPDO映射到的資源。這將幫助您更好地理解TPDO的...
【CANopen系列】CANopen從站為什么總不上傳PDO報文?
在CANopen網絡中無法獲取從站的TPDO數據?本文將為您解析可能的原因及解決方案。通過檢查TPDO的通信參數和傳輸類型,確保主站與從站的數據同步,快...
在風力發電領域,開疆canopen轉Profinet網關KJ-PNG-205的應用案例通常涉及將風力渦輪機內部的CANopen網絡與外部的Profine...
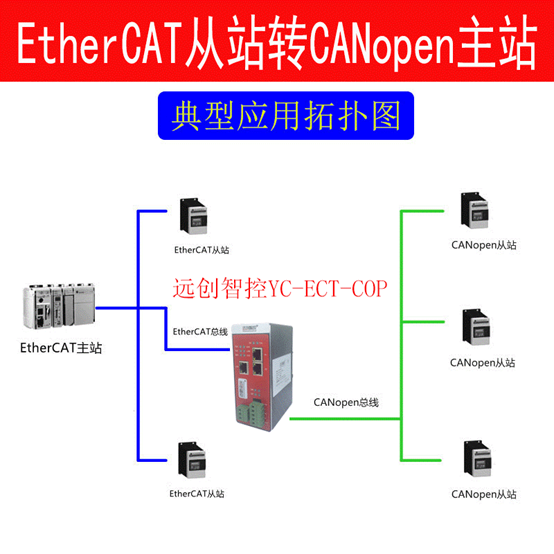
作者的許多朋友均對如何實現EtherCAT網絡和CANopen網絡的連接互通感到十分困擾,現在為大家統一作出解釋。事實上,遠創智控YC-ECT-COP此...
Canopen轉Profient神奇聯姻!伺服界的甜蜜CP,生產效率飆升秘籍
實現無縫通信,優化生產流程穩聯技術Profinet轉Canopen(WL-ABC3033)網關在不同通信協議之間搭建起了一座橋梁,使得原本使用Profi...
奇妙的交互,真的可以實現CanOpen轉Profinet嗎?
開疆智能canopen轉profinet網關KJ-PNG-205在鑄造機床中的應用,不僅提升了設備間的通訊效率,還增強了整個生產系統的可靠性和靈活性。隨...
奇妙的交互,真的可以實現CanOpen轉Profinet嗎?
開疆智能canopen轉profinet網關KJ-PNG-205在鑄造機床中的應用,揭示其在實現設備互聯互通、提高系統穩定性方面的重要作用。我們需要了解...
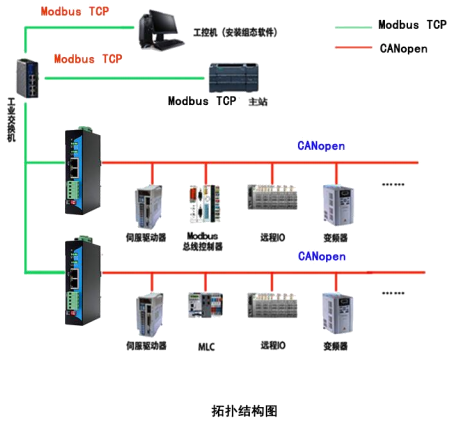
產品概述 SG-TCP-COE-210 網關可以實現將 CANOpen 接口設備連接到 MODBUS TCP 網絡中。用戶不需要了解具體的 CANOpe...
淺談鳳凰動力旗下品牌inagv伺服產品CANopen協議及產品方案應用
CANopen協議,這一源自汽車通訊領域CAN協議的衍生技術,在歐洲的工業自動化領域得到了廣泛的應用。其開創性的集成工作由BECKOFF公司率先完成,其...

一,設備主要功能 捷米特JM-DP-COP網關主要功能是將各種CANopen設備接入到Profibus DP網絡中。該網關連接到Profibus DP總...
2024-09-12 標簽:CANopenPROFIBUS DP協議網關 227 0

CC-Link IEFB轉CANopen主站網關(CC-Link IEFB轉CANopen)
在工業自動化領域,CC-Link IEFB轉CANopen網絡協議的互通互聯至關重要。遠創智控YC-CCLKIE-COP設備表現卓越,能有效攻克這一難題...

DeviceNet轉CANopen協議網關(DeviceNet轉CANopen)
一,設備主要功能 捷米特JM-DNT-COP網關實現DeviceNet總線和CANopen網絡連接起來。本網關連接到DeviceNet總線中作為從站使用...

一,設備主要功能 捷米特JM-EIP-COP本產品實現EtherNet/IP網絡與CANopen網絡之間的數據通訊,即EtherNet/IP和CANop...
 換一批
換一批
編輯推薦廠商產品技術軟件/工具OS/語言教程專題
| 電機控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機 | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機 | PID | MOSFET | 傳感器 | 人工智能 | 物聯網 | NXP | 賽靈思 |
| 步進電機 | SPWM | 充電樁 | IPM | 機器視覺 | 無人機 | 三菱電機 | ST |
| 伺服電機 | SVPWM | 光伏發電 | UPS | AR | 智能電網 | 國民技術 | Microchip |
| 開關電源 | 步進電機 | 無線充電 | LabVIEW | EMC | PLC | OLED | 單片機 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 藍牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太網 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 語音識別 | 萬用表 | CPLD | 耦合 | 電路仿真 | 電容濾波 | 保護電路 | 看門狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 閾值電壓 | UART | 機器學習 | TensorFlow |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關注我們的微信

下載發燒友APP

電子發燒友觀察

版權所有 ? 湖南華秋數字科技有限公司
長沙市望城經濟技術開發區航空路6號手機智能終端產業園2號廠房3層(0731-88081133)
電子發燒友 (電路圖) 湘公網安備43011202000918 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1