完善資料讓更多小伙伴認識你,還能領取20積分哦,立即完善>
標簽 > RMS

任務按單調速率優先級分配(RMPA)的調度算法,稱為單調速率調度(RMS)。RMPA是指任務的優先級按任務周期T來分配。它根據任務的執行周期的長短來決定調度優先級,那些具有小的執行周期的任務具有較高的優先級,周期長的任務優先級低。
任務按單調速率優先級分配(RMPA)的調度算法,稱為單調速率調度(RMS)。RMPA是指任務的優先級按任務周期T來分配。它根據任務的執行周期的長短來決定調度優先級,那些具有小的執行周期的任務具有較高的優先級,周期長的任務優先級低。
任務按單調速率優先級分配(RMPA)的調度算法,稱為單調速率調度(RMS)。RMPA是指任務的優先級按任務周期T來分配。它根據任務的執行周期的長短來決定調度優先級,那些具有小的執行周期的任務具有較高的優先級,周期長的任務優先級低。
RMS(Rate-Monotonic Scheduling)調度算法
簡介不考慮n=1的情況。RMS是單處理器下的最優靜態調度算法。1973年Liu和Layland發表的這篇文章的前半部分,首次提出了RM調度算法在靜態調度中的最優性。它的一個特點是可通過對系統資源利用率的計算來進行任務可調度性分析,算法簡單、有效,便于實現。不僅如此,他們還把系統的利用系數(utilization factor)和系統可調度性聯系起來,推導出用RM調度所能達到的最小系統利用率公式。 同時,這篇論文中透露出來的證明思想和方法也被人們所效仿。下面就讓我們來看看這篇文章中關于RM調度算法的重要結論。任何一個結論都有一個模型假設,讓我們先列出這里的假設:(A1) 所有的任務請求都是周期性的,必須在限定的時限內完成;(A2) 任務的作業必須在該任務的下一個作業發生之前完成,這樣避免了考慮隊列問題; 在這里,我們對任務和作業不作特別的區分,因為一個任務請求就是一個作業。(A3) 任務之間都是獨立的,每個任務的請求不依賴于其他任務請求的開始或完成;(A4) 每個任務的運行時間是不變的,這里任務的運行時間是指處理器在無中斷情況下用于處理該任務的時間;(A5) 所有的非周期性任務都在特殊的情況下運行,比如系統初始化或系統非正常緊急處理程序。(A6) 其它一些假設,比如,單處理器,可搶占調度,任務切換的時間忽略不計等等。
RMS算法⑴ 任務T i (P i,Ci,D i) 模型: 周期為P i,計算時間為Ci,時限D i 為周期終點。任務在周期起點釋放,高優先級任務可搶占低優先級任務的執行。⑵ 優先級分配方法: 靜態固定分配。優先級與周期成反比,周期越短優先級越高。⑶ 可調度性分析: 如果任務集滿足下式,則該任務集可調度。
定理1n個獨立的周期任務可以被RMPA調度,如果U《=n(2^(1/n)-1)。一個任務的響應時間(response time)是指一個任務請求,這個任務實際完成的時間跨度。在靜態調度中,任務的臨界時刻(critical instant)這個概念被首先提出來,它被定義為一個特定的時刻,如果在這個時刻有這個任務的請求,那么這個任務就會需要最大的響應時間,由此得出定理1:一個任務的臨界時間就是比這個任務優先級高的所有任務同時發出請求的時刻。證明: 由于一個任務的響應時間,是它自己的負載時間,加上被其它優先級高的任務所打斷的時間。由于自己的負載時間是固定的,我們考慮在什么時候任一高優先級的任務會有最長的打斷時間。顯然,只有當這一高優先級的任務與該任務同時請求處理時,才能可能產生最大的打斷時間。定理1的價值在于它找到了一個證明、一個調度算法,能否調度任一任務集充分必要條件,那就是所有任務同時請求執行的時的情況下,每個任務仍能滿足各自的期限,那么這個任務集就可以被這個調度算法調度。有了這個推論,我們就可以證明RM調度的最優性了。
定理2如果一個任務集能夠被靜態調度,那么RMS算法就能夠調度這個任務集。從這個意義上說,RMS是最優的靜態調度算法。這個定理的證明方法就是有名的交換法。證明思路如下:假設一個任務集S采用其他靜態優先級算法可以調度,那么總有這樣兩個優先級相鄰的任務i和j,有Ti》Tj,而Pi≤Pj。把Ti和Tj的優先級Pi和Pj互換,明顯可以看出這時S仍然可以調度,因為在所有任務同時請求的情況下,交換這兩個任務不會影響其它任務的完成時間,同時這兩個任務都可以在各自期限內完成,按照這樣的方法,其他任何靜態優先級調度最終都可以轉換成RM調度。RMS已被證明是靜態最優調度算法,開銷小,靈活性好,是實時調度的基礎性理論。即使系統瞬時過載,也完全可預測哪些任務丟失時限。缺點是處理機利用率較低,最壞的情況下,當n→∞時,不超過ln2(≈ 70%)。另外,RMS是充分但非必要條件。而在一般情況下,對于隨機的任務集大約只有88%。70%或者88%的處理器利用率,對于許多實時應用來說是一個嚴重的限制,動態調度算法如最早截止期、最先(earliest deadlinefirst,EDF)或者最少空閑時間最先(least laxity first,LLF)已經被證明是最優的,并且能夠實現100%的處理器利用率。
調度具有資源同步約束的RMS調度當實時任務間共享資源時,可能出現低優先級任務不可預測地阻塞高優先級任務執行的情況,叫優先級倒置。這時RMS 算法不能保證任務集的調度,必須使用有關協議控制優先級的倒置時間。常用的協議有優先級頂級協議和堆資源協議,使用這些協議可使優先級的倒置時間最多為一個資源臨界段的執行時間,并且不會發生死鎖。基于RMS 的非周期任務的調度實時系統中的非周期任務可采用延遲服務器算法或隨機服務器算法進行調度。它們的最大特點是可在周期任務的實時調度環境下處理隨機請求。兩者的基本思想是將非周期任務轉化成周期任務,再利用RMS算法進行調度。前者用一個或幾個專用的周期任務執行所有非周期任務,這種周期任務叫非周期任務服務器。根據周期大小,服務器有固定優先級,服務器的執行時間被稱為預算,它在每個服務器周期Ts的起點補充。只要服務器有充足的預算,就可在其周期內為非周期任務服務。該算法實現簡單,但可調度性分析較難,有時會出現抖動,可能發生一個非周期任務在相鄰兩個服務器周期中連續執行2倍預算的現象,與RMS理論不符,需要適當修改RMS算法。隨機服務器算法與延遲服務器算法相似,但預算不是在每個周期起點補充,而是在預算消耗Ts時間之后再補充。該算法與RMS分析算法一致,但實現復雜。人物如份額。
均方根RMS(Root Mean Square)就是均方根,實際就是有效值,是一組統計數據的平方和的平均值的平方根。RMS=sqrt[(x1^2+x2^2+.。。。。.+xn^2)/n]英語寫為:Root Mean Square(RMS)。美國傳統詞典的定義為:The square root of the average of squares of a set of numbers.即:將N個項的平方和除以N后開平方的結果,即均方根的結果。均方根應用:在直流(DC)電路中,電壓或電流的定義很簡單,但在交流(AC)電路中,其定義就較為復雜,有多種定義方式。均方根(rms)指的是定義AC波的有效電壓或電流的一種最普遍的數學方法。要得出rms值需要對表示AC波形的函數執行三個數學操作:⑴計算波形函數(一般是正弦波)的平方值。⑵對第一步得到的函數求時間平均值。⑶求第二步得到的函數的平方根。
有效值在一個阻抗由純電阻組成的電路中,AC波的rms值通常稱作有效值或DC等價值。比如,一個100V rms的AC源連接著一個電阻器,并且其電流產生50W熱量,那么對于100V連接著這個電阻器的電源來說也將產生50W的熱量。對正弦波來說,rms值是峰值的0.707倍,或者是峰-峰值的0.354倍。家用電壓是以rms來表示的。所謂的“117V”的交流電,其峰值(pk)約為165V,峰-峰值(pk-pk)約為330V。RMS Voltage(有效電壓)RMS Voltage(Root mean square value of alternating-current (ac) voltage):同Effective voltage。對于正弦曲線交流電壓,U(RMS) = 0.707U(MAX)RMS Current(有效電流)RMS Current(Root mean square value of alternating-current (ac) current):同Effective current。對于正弦曲線交流電流,I(RMS) = 0.707I(MAX)
安全技術
Rights Management ServicesMicrosoft Windows Rights Management 服務 (RMS),是一種與應用程序協作來保護數字內容(不論其何去何從)的安全技術,專為那些需要保護敏感的 Web 內容、文檔和電子郵件的用戶而設計。用戶可以嚴格規定哪些用戶可以打開、讀取、修改和重新分發特定內容。組織可以創建權限策略模板,以實施用戶應用于內容的策略。
MIDP中
Record Management System是MIDP中一個非常重要的子系統。RMS是首先在MIDP1.0中提出的,它所在的包是javax.microedition.rms,在這個包里面總共包括四個接口、一個類和五個異常。
監控系統
Remote Monitoring System遠程監控系統
黑客
Richard Matthew Stallman
簡介(理查德·馬修·斯托曼)理查德·馬修·斯托曼理查德·馬修·斯托曼(Richard Matthew Stallman,RMS,生于1953年),自由軟件運動的精神領袖、GNU計劃以及自由軟件基金會(Free Software Foundation)的創立者、著名黑客。他最大的影響是為自由軟件運動豎立了道德、政治以及法律框架。他被許多人譽為當今自由軟件的斗士、偉大的理想主義者,但同時也有人批評他過于固執、觀點落伍。斯托曼1953年出生于美國紐約曼哈頓地區,1971年進入哈佛大學學習,同年受聘于麻省理工學院人工智能實驗室(AI Laboratory),成為一名職業黑客。在AI實驗室工作期間,斯托曼開發了多種今后影響深遠的軟件,其中最著名的就是Emacs。斯托曼在AI是一名典型的黑客,是整個黑客文化的一分子。然而進入八十年代后,黑客社群在軟件工業商業化的強大壓力下日漸土崩瓦解,甚至連AI實驗室的許多黑客也組成了Symbolic公司,試圖以專利軟件來取代實驗室中黑客文化的產物--免費可自由流通的軟件。斯托曼對此感到氣憤與無奈。在對Symbolic進行了一段時間的抗爭后,他于1985年發表了著名的GNU宣言(GNU Manifesto),正式宣布要開始進行一項宏偉的計劃:創造一套完全自由免費,兼容于Unix的操作系統GNU(GNU‘s Not Unix!),目的是打破大型網絡供應商的壟斷。現今,GNU 已成為全球最受歡迎的自由軟件許可證!之后他又建立了自由軟件基金會來協助該計劃。他于1989年與一群律師起草了廣為使用的GNU通用公共協議證書(GNU General Public License,GNU GPL),創造性地提出了“反版權”(或“版權屬左”,或“開權”,copyleft)的概念。同時,GNU計劃中除了最關鍵的Hurd操作系統內核之外,其他絕大多數軟件已經完成。1991年芬蘭大學生李納斯(LinusTorvalds)在GPL條例下發布他自己創作的Linux操作系統內核,至此GNU計劃正式完成,操作系統被命名為GNU/Linux(或簡稱Linux)。自 90 年代開始,斯托曼開始積極參加政治運動,到各間大學和場合主講,宣揚推行自由軟件的訊息,令他無論在電腦界或學術界都享負盛名!斯托曼是一名堅定的自由軟件運動倡導者,與其他提倡開放源代碼的人不同,斯托曼并不是從軟件質量的角度而是從道德的角度來看待自由軟件。他認為使用專利軟件是非常不道德的事,只有附帶了源代碼的程序才是符合其道德標準的。對此許多人表示異議,并也因此有了自由軟件運動與開源軟件運動之分。
代表作— 創立自由軟件GNU— Emacs 文字編輯器— GCC編譯器— GDB調試器斯托曼還曾獲得過多項榮譽1990年度麥克阿瑟獎(MacArthur Fellowship)1991年度美國計算機協會(Association for Computing Machinery)頒發的Grace Hopper Award以表彰他所開發的的Emacs文字編輯器1996年獲頒瑞典皇家技術學院榮譽博士學位1998年度電子前線基金會(Electronic Frontier Foundation)先鋒獎(Pioneer Award)1999年Yuri Rubinsky紀念獎2001年獲頒格拉斯哥大學榮譽博士學位2001年武田研究獎勵賞(武田研究奨勵賞)2002年成為美國國家工程院院士2003年獲頒布魯塞爾大學榮譽博士學位Richard Stallman與中國“龍芯”
其他有開源社區精神領袖之稱的Richard Stallman在多個場合呼吁開源社區大力支持基于龍芯電腦的軟件開發,主要原因是在OLPC項目使用微軟的操作系統,走商業化道路后,龍芯在2009年是唯一堅持開源的電腦CPU。RMS(記錄管理系統)是MIDP的一個子系統。為開發者提供了數據持久性存儲的解決方案,應用程序的數據可以在MIDlet多次調用之后依然保持不變,即使重新啟動設備或者更換電池也不會造成數據丟失。
建模軟件
Reservior Modeling System
簡介建模數模一體化綜合研究平臺RMS(Reservoir Modeling System)是三維地質建模軟件的鼻祖。其前身是工業界第一款地質建模軟件IRAP(Geomatic公司,1987年),1995年IRAP被ROXAR收購后與ResView、STORM等軟件整合成為IRAP RMS。發展到今天RMS已經成為一個完善的從勘探到開發的建模數模一體化綜合研究平臺,為用戶提供四個核心技術方案以幫助客戶提高投資回報:油氣藏地質建模解決方案 RMS一體化建模流程油氣藏數值模擬解決方案油氣藏風險評估解決方案鉆井設計和隨鉆跟蹤解決方案
RMS一體化建模流程油氣藏數值模擬解決方案油氣藏風險評估解決方案鉆井設計和隨鉆跟蹤解決方案
技術優勢1.復雜構造建模⒈1RMS的復雜構造建模算法是業界最優的,對于犁式斷層、分支斷層、滑脫斷層、逆斷層、地塹、巖丘等的解決效果優于其他同類軟件。 1.2構造建模的質量控制便捷,可以大大提高工作效率。一體化的斷層建模流程不再采用PillarGriding算法,可以很好地處理斷層之間的交切關系,編輯便捷,不用重新進行斷層運算。層面的質量控制也只需鼠標點擊快速運算即可,可以節省大量的時間。⒈3網格設計最優,其他同類產品不具備。如圖是RMS獨有的“Air Interpretation”網格搭建方法,能更逼近真實地層情況。
1.2構造建模的質量控制便捷,可以大大提高工作效率。一體化的斷層建模流程不再采用PillarGriding算法,可以很好地處理斷層之間的交切關系,編輯便捷,不用重新進行斷層運算。層面的質量控制也只需鼠標點擊快速運算即可,可以節省大量的時間。⒈3網格設計最優,其他同類產品不具備。如圖是RMS獨有的“Air Interpretation”網格搭建方法,能更逼近真實地層情況。
 2.相建模方法豐富、技術領先。2.1序貫指示模擬法獨有的去噪處理可以很好地消除隨機算法引起的誤差,而其它軟件只能平滑而不能降噪。⒉2序貫指示模擬變變差函數,輔助多物源方向模擬效果最優。⒉3一般示性點模擬法可以精細刻畫目標體的幾何形態及細微差異,該算法是其它建模軟件不具備的。⒉4示性點模擬是RMS軟件獨有的河流相模擬算法,可以模擬多種河道類型,可以選擇不同的按鈕模擬不同的單河道或多河道選項控制最終的模擬結果。⒉5地震-沉積相模擬算法是RMS獨有的基于目標的模擬算法,可以將多個精細地震數據上提取的多邊形都模擬到目標體中去。3.屬性建模⒊1自動評估主方向。⒊2內置J函數的飽和度模擬算法。4.網格粗化時使用“控制線”控制網格粗化,三維交互式編輯網格。5.真正集成的三維三相的黑油模擬器,不需要定義關鍵字。6.經過試井分析校正的裂縫建模。7.考慮因素全面(破碎因子、膠結因子和泥巖涂抹)的斷層封堵性分析。8.模塊選擇靈活性大,必選模塊只有一個,其它均可選,更節省資源。
2.相建模方法豐富、技術領先。2.1序貫指示模擬法獨有的去噪處理可以很好地消除隨機算法引起的誤差,而其它軟件只能平滑而不能降噪。⒉2序貫指示模擬變變差函數,輔助多物源方向模擬效果最優。⒉3一般示性點模擬法可以精細刻畫目標體的幾何形態及細微差異,該算法是其它建模軟件不具備的。⒉4示性點模擬是RMS軟件獨有的河流相模擬算法,可以模擬多種河道類型,可以選擇不同的按鈕模擬不同的單河道或多河道選項控制最終的模擬結果。⒉5地震-沉積相模擬算法是RMS獨有的基于目標的模擬算法,可以將多個精細地震數據上提取的多邊形都模擬到目標體中去。3.屬性建模⒊1自動評估主方向。⒊2內置J函數的飽和度模擬算法。4.網格粗化時使用“控制線”控制網格粗化,三維交互式編輯網格。5.真正集成的三維三相的黑油模擬器,不需要定義關鍵字。6.經過試井分析校正的裂縫建模。7.考慮因素全面(破碎因子、膠結因子和泥巖涂抹)的斷層封堵性分析。8.模塊選擇靈活性大,必選模塊只有一個,其它均可選,更節省資源。
共享系統
數字資源管理共享系統Queran RMS是確然公司憑借在網絡、多媒體、元數據方面多年積累的經驗,自主研發的是基于“流媒體技術”和“元數據技術”,將各種多媒體資源(如視音頻、圖形圖像、電子書、各種文檔等)進行統一定義、管理,并為最終用戶提供檢索、瀏覽、在線播放等服務的系統。產品優勢立足于“元數據技術”和“流媒體技術”構建—站式多媒體資源服務平臺提供多媒體資源統一檢索、揭示和高性能點播服務實現“以用戶為中心”的資源社區化建設 RMS:可靠性、維修性和保障性RMS為可靠性Realibility、維修性Maintainability和保障性supportability的縮寫。在國防科技和武器裝備、航空航天、軌道交通等領域陸續推行可靠性、維修性和綜合保障標準RMS。
RMS:可靠性、維修性和保障性RMS為可靠性Realibility、維修性Maintainability和保障性supportability的縮寫。在國防科技和武器裝備、航空航天、軌道交通等領域陸續推行可靠性、維修性和綜合保障標準RMS。


好多網友對這樣一個問題有些迷茫,就是, 關于易電源模塊的前級和后級使用電解電容的問題,為什么和我們習慣設計不一樣?當只給你一個有極性的電解電容時,到底是...
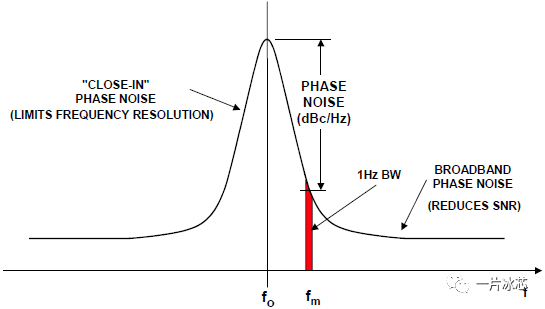
作者:Bill Schweber 投稿人:DigiKey 北美編輯 通過為系統組件確定步調,時鐘振蕩器為現代電路提供定時。隨著系統速度提高到數百 MHz...
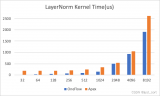
我去實測了一下,單機8卡A100訓練LLama7B,純數據并行的情況下打開memory_efficient開關相比于不打開節省了大約2個G的顯存,如果模...
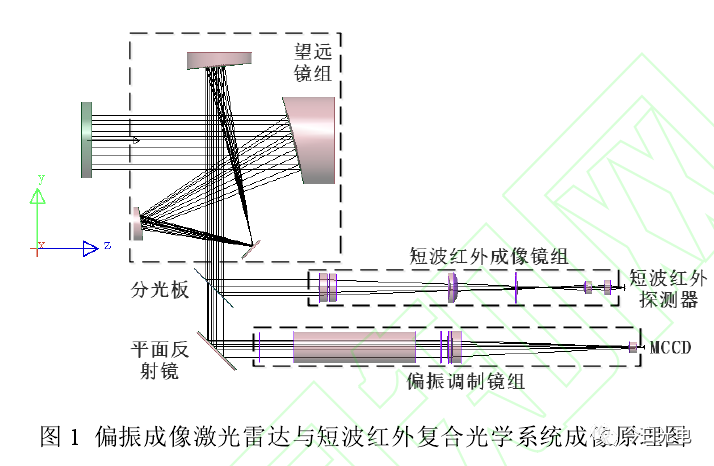
三維成像激光雷達因具備主動照明、角度分辨率高、可探測距離信息等優勢,被視為是被動遙感和微波雷達后的下一代技術產品,與傳統被動傳感器成像及微波雷達相比,三...
第1部分定義并描述了承載這些低電流的設計,解釋了設計這些電路時出現的問題,并研究了屏蔽和防護方法的應用。在第 2 部分中,將研究元件選擇如何影響低泄漏電...
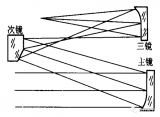
利用Zemax光學設計軟件與自編計算機輔助裝調軟件,實現了對大口徑、長焦距、無中心遮攔離軸三反射鏡光學系統的裝調。

llama.cpp 的代碼結構比較直觀,如下所示,為整體代碼結構中的比較核心的部分的代碼結構
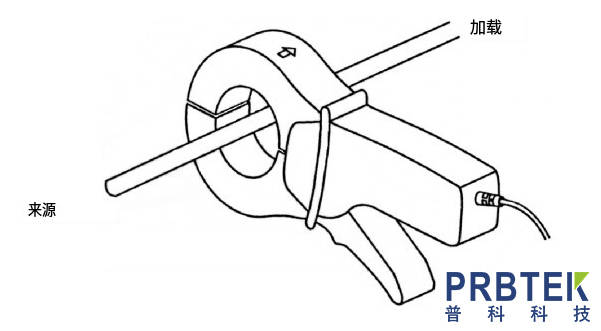
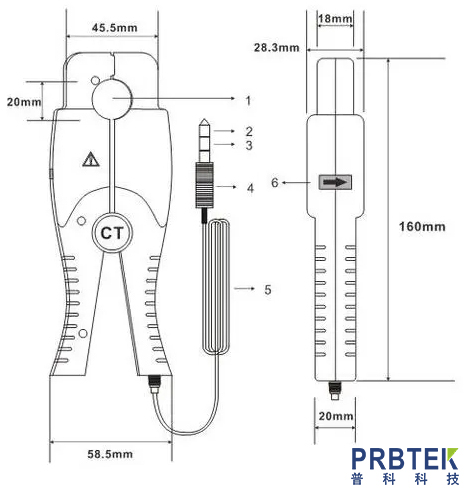
泰克TEKTRONIX示波器電流鉗電流探頭A621的安裝使用說明
泰克A621電流探頭能夠在泰克TDS、TAS或通用示波器上顯示高達1000安培RMS的電流波形。A621特別適用于需要顯示和測量畸變電流波形和諧波的場合...

多光譜紅外探測技術能豐富遙感載荷的圖像信息,提高圖像的反演精度,而多透鏡和多波段探測器集成封裝設計能縮小光學載荷體積,同時節約制冷資源。
電能質量標準中常用術語和定義的解讀:10、RMS事件源擾動方向的定位對識別故障源和方向至關重要。暫降源方向可以通過監測電壓和電流之間的關系來確定。德國G...

無論你只是隨意瀏覽還是正在尋求問題的答案,請花點時間閱讀我們整理的電能質量常見技術問題和對應的解決方法。通過閱讀以下內容,你可能都不需要我們的技術支持人...
什么是真RMS鉗位呢?為什么我們需要使用真RMS鉗位呢? 真RMS鉗位是一種測量電流或電壓的儀器,能夠準確測量非正弦波形信號的有效值。RMS是“均方根”...
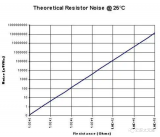
噪聲分析、誤差分析中,什么類型的噪聲、誤差可以用均方根計算?
噪聲分析、誤差分析中,什么類型的噪聲、誤差可以用均方根計算?什么類型的噪聲需要直接加在總噪聲中? 在噪聲分析和誤差分析中,我們常常使用均方根(Root ...
在電力領域,電流測量是非常重要的。然而,準確測量電流并不總是一件容易的事情。傳統的電流探頭只能測量交流電的有效值,也就是所謂的RMS值。然而,在某些情況...

9月22日,以“物流科技助力光伏產業開啟太瓦時代”為主題的2023全國新能源(光伏)供應鏈與物流技術峰會在江蘇·常州隆重召開,尋跡智行受邀如期參加,現場...
380v電壓諧波畸變率標準? 隨著工業、商業和家庭電氣化的日益發展,電氣設備的種類和數量不斷增加,使得電網電壓波形變形的現象日益普遍。電氣設備的使用不僅...
 換一批
換一批
編輯推薦廠商產品技術軟件/工具OS/語言教程專題
| 電機控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機 | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機 | PID | MOSFET | 傳感器 | 人工智能 | 物聯網 | NXP | 賽靈思 |
| 步進電機 | SPWM | 充電樁 | IPM | 機器視覺 | 無人機 | 三菱電機 | ST |
| 伺服電機 | SVPWM | 光伏發電 | UPS | AR | 智能電網 | 國民技術 | Microchip |
| 開關電源 | 步進電機 | 無線充電 | LabVIEW | EMC | PLC | OLED | 單片機 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 藍牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太網 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 語音識別 | 萬用表 | CPLD | 耦合 | 電路仿真 | 電容濾波 | 保護電路 | 看門狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 閾值電壓 | UART | 機器學習 | TensorFlow |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關注我們的微信

下載發燒友APP

電子發燒友觀察

版權所有 ? 湖南華秋數字科技有限公司
長沙市望城經濟技術開發區航空路6號手機智能終端產業園2號廠房3層(0731-88081133)
電子發燒友 (電路圖) 湘公網安備43011202000918 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1