完善資料讓更多小伙伴認識你,還能領取20積分哦,立即完善>
標簽 > RTOS

實時操作系統(RTOS)是指當外界事件或數據產生時,能夠接受并以足夠快的速度予以處理,其處理的結果又能在規定的時間之內來控制生產過程或對處理系統做出快速響應,調度一切可利用的資源完成實時任務,并控制所有實時任務協調一致運行的操作系統。
實時操作系統(RTOS)是指當外界事件或數據產生時,能夠接受并以足夠快的速度予以處理,其處理的結果又能在規定的時間之內來控制生產過程或對處理系統做出快速響應,調度一切可利用的資源完成實時任務,并控制所有實時任務協調一致運行的操作系統。提供及時響應和高可靠性是其主要特點。
RTOS系統
RTOS是一個內核,典型的單片機程序在程序指針復位后,首先進行堆棧、中斷、中斷向量、定時器、串行口等接口設置、初始化數據存儲區和顯示內容,然后就來到了一個監測、等待或空循環,在這個循環中,CPU可以監視外設、響應中斷或用戶輸入。
這段主程序可以看作是一個內核,內核負責系統的初始化和開放、調度其它任務,相當于C語言中的主函數。
RTOS就是這樣的一個標準內核,包括了各種片上外設初始化和數據結構的格式化,不必、也不推薦用戶再對硬件設備和資源進行直接操作,所有的硬件設置和資源訪問都要通過RTOS核心。硬件這樣屏蔽起來以后,用戶不必清楚硬件系統的每一個細節就可以進行開發,這樣就減少了開發前的學習量。
實時操作系統(RTOS)是指當外界事件或數據產生時,能夠接受并以足夠快的速度予以處理,其處理的結果又能在規定的時間之內來控制生產過程或對處理系統做出快速響應,調度一切可利用的資源完成實時任務,并控制所有實時任務協調一致運行的操作系統。提供及時響應和高可靠性是其主要特點。
定義
實時操作系統是保證在一定時間限制內完成特定功能的操作系統。實時操作系統有硬實時和軟實時之分,硬實時要求在規定的時間內必須完成操作,這是在操作系統設計時保證的;軟實時則只要按照任務的優先級,盡可能快地完成操作即可。我們通常使用的操作系統在經過一定改變之后就可以變成實時操作系統。
例如,可以為確保生產線上的機器人能獲取某個物體而設計一個操作系統。在“硬”實時操作系統中,如果不能在允許時間內完成使物體可達的計算,操作系統將因錯誤結束。在“軟”實時操作系統中,生產線仍然能繼續工作,但產品的輸出會因產品不能在允許時間內到達而減慢,這使機器人有短暫的不生產現象。一些實時操作系統是為特定的應用設計的,另一些是通用的。一些通用目的的操作系統稱自己為實時操作系統。但某種程度上,大部分通用目的的操作系統,如微軟的Windows NT或IBM的OS/390有實時系統的特征。這就是說,即使一個操作系統不是嚴格的實時系統,它們也能解決一部分實時應用問題。
大體上,實時操作系統(RTOS)要求:
多任務
處理能被區分優先次序的進程線
一個中斷水平的充份數量
被裝入作為微型設備一部分的內含小操作系統經常要求實時操作系統。一些核心問題能被考慮以符合實時操作系統的需求。然而,因為像設備驅動程序這樣的其他成份,也通常被特別的方法需要,一個實時操作系統通常比核心更大。
RTOS系統
1.RTOS是一個內核
典型的單片機程序在程序指針復位后,首先進行堆棧、中斷、中斷向量、定時器、串行口等接口設置、初始化數據存儲區和顯示內容,然后就來到了一個監測、等待或空循環,在這個循環中,CPU可以監視外設、響應中斷或用戶輸入。
這段主程序可以看作是一個內核,內核負責系統的初始化和開放、調度其它任務,相當于C語言中的主函數。
RTOS就是這樣的一個標準內核,包括了各種片上外設初始化和數據結構的格式化,不必、也不推薦用戶再對硬件設備和資源進行直接操作,所有的硬件設置和資源訪問都要通過RTOS核心。硬件這樣屏蔽起來以后,用戶不必清楚硬件系統的每一個細節就可以進行開發,這樣就減少了開發前的學習量。
一般來說,對硬件的直接訪問越少,系統的可靠性越高。RTOS是一個經過測試的內核,與一般用戶自行編寫的主程序內核相比,更規范,效率和可靠性更高。對于一個精通單片機硬件系統和編程的“老手”而言,通過RTOS對系統進行管理可能不如直接訪問更直觀、自由度大,但是通過RTOS管理能夠排除人為疏忽因素,提高軟件可靠性。
另外,高效率地進行多任務支持是RTOS設計從始至終的一條主線,采用RTOS管理系統可以統一協調各個任務,優化CPU時間和系統資源的分配,使之不空閑、不擁塞。針對某種具體應用,精細推敲的應用程序不采用RTOS可能比采用RTOS能達到更高的效率;但是對于大多數一般用戶和新手而言,采用RTOS是可以提高資源利用率的,尤其是在片上資源不斷增長、產品可靠性和進入市場時間更重要的今天。
2.RTOS是一個平臺
RTOS建立在單片機硬件系統之上,用戶的一切開發工作都進行于其上,因此它可以稱作是一個平臺。采用RTOS的用戶不必花大量時間學習硬件,和直接開發相比起點更高。
RTOS還是一個標準化的平臺,它定義了每個應用任務和內核的接口,也促進了應用程序的標準化。應用程序標準化后便于軟件的存檔、交流、修改和擴展,為嵌入式軟件開發的工程化創造了條件、減少開發管理工作量。嵌入式軟件標準化推廣到社會后,可以促進軟件開發的分工,減少重復勞動,近來出現的建立于RTOS上的文件和通信協議庫函數產品等就是實例。
RTOS對于開發單位和開發者個人來說也是一種提高。引入RTOS的開發單位,相當于引入了一套行業中廣泛采用的嵌入式系統應用程序開發標準,使開發管理更簡易、有效。基于RTOS和C語言的開發,具有良好的可繼承性,在應用程序、處理器升級以及更換處理器類型時,現存的軟件大部分可以不經修改地移植過來。
對于開發人員來說,則相當于在程序設計中采用一種標準化的思維方式,提高知識創造的效率;同時因為具有類似的思路,可以更快地理解同行其它人員的創造成果
特點
一、時間約束性
實時系統的任務具有一定的時間約束(截止時間)。根據截止時間,實時系統的實時性分為“硬實時”和“軟實時”。硬實時是指應用的時間需求能夠得到完全滿足,否則就造成重大安全事故,甚至造成重大的生命財產損失和生態破壞,如在航空航天、軍事、核工業等一些關鍵領域中的應用。軟實時是指某些應用雖然提出時間需求,但實時任務偶爾違反這種需求對系統運行及環境不會造成嚴重影響,如監控系統等和信息采集系統等。
二、可預測性
可預測性是指系統能夠對實時任務的執行時間進行判斷,確定是否能夠滿足任務的時限要求。由于實時系統對時間約束要求的嚴格性,使可預測性稱為實時系統的一項重要性能要求。除了要求硬件延遲的可預測性以外,還要求軟件系統的可預測性,包括應用程序的響應時間是可預測的,即在有限的時間內完成必須的工作;以及操作系統的可預測性,即實時原語、調度函數等運行開銷應是有界的,以保證應用程序執行時間的有界性。
三、可靠性
大多數實時系統要求有較高的可靠性。在一些重要的實時應用中,任何不可靠因素和計算機的一個微小故障,或某些特定強實時任務(又叫關鍵任務)超過時限,都可能引起難以預測的嚴重后果。為此,系統需要采用靜態分析和保留資源的方法及冗余配置,使系統在最壞情況下都能正常工作或避免損失。可靠性已成為衡量實時系統性能不可缺少的重要指標。
四、與外部環境的交互作用性
實時系統通常運行在一定的環境下,外部環境是實時系統不可缺少的一個組成部分。計算機子系統一般是控制系統,它必須在規定的時間內對外部請求做出反應。外部物理環境往往是被控子系統,兩者互相作用構成完整的實時系統。大多數控制子系統必須連續運轉以保證子系統的正常工作或準備對任何異常行為采取行動。
早期的實時系統功能簡單,包括單板機、單片機,以及簡單的嵌入式實時系統等,其調度過程相對簡單。隨著實時系統應用范圍的不斷擴大,系統復雜性不斷提高,實時系統具有以下新特點。
1、多任務類型
在實時系統中,不但包括周期任務、偶發任務、非周期任務,還包括非實時任務。實時任務要求要滿足時限,而非實時任務要求要使其響應時間盡可能的短。多種類型任務的混合,使系統的可調度性分析更加困難。
2、約束的復雜性
任務的約束包括時間約束、資源約束、執行順序約束和性能約束。時間約束是任何實時系統都固有的約束。資源約束是指多個實時任務共享有限的資源時,必須按照一定的資源訪問控制協議進行同步,以避免死鎖和高優先級任務被低優先級任務堵塞的時間(即優先級倒置時間)不可預測。執行順序約束是指各任務的啟動和執行必須滿足一定的時間和順序約束。例如,在分布式端到端(end-to-end)實時系統很重,同一任務的各子任務之間存在前驅/后驅約束關系,需要執行同步協議來管理子任務的啟動和控制子任務的執行,使它們滿足時間約束和系統可調度要求。性能約束是指必須滿足如可靠性、可用性、可預測性、服務質量(Quality of Service,QoS)等性能指標。
3、具有短暫超載的特點
在實時系統中,即使一個功能設計合理、資源充足的系統也可能由于一下原因超載:
1)系統元件出現老化,外圍設備錯誤或系統發生故障。隨著系統運行時間的增長,系統元件出現老化,系統部件可能發生故障,導致系統可用資源降低,不能滿足實時任務的時間約束要求。
2)環境的動態變化。由于不能對未來的環境、系統狀態進行正確有效地預測,因此不能從整體角度上對任務進行調度,可能導致系統超載。
3)應用規模的擴大。原先滿足實時任務時限要求的系統,隨著應用規模的增大,可能出現不能滿足任務時限要求的情況,而重新設計、重建系統在時間和經濟上又不允許。


國產HMI芯片Model系列融合OneOS與RT-Thread,RTOS優勢體現在哪?
在當今這個對實時性要求日益嚴苛的嵌入式系統時代,RTOS作為核心軟件架構,正扮演著不可或缺的角色。而當我們深入探討RTOS的廣泛應用與優勢時,不得不提到...
FreeRTOS 和 RTOS(實時操作系統)是兩個不同的概念,但它們之間有緊密的聯系。FreeRTOS 是一個特定的開源實時操作系統,而 RTOS 是...
在嵌入式系統開發中,選擇合適的實時操作系統(RTOS)對于項目的成功至關重要。FreeRTOS和RT-Thread是兩個非常流行的開源RTOS,它們各自...

高性能低成本工業HMI解決方案: HMI芯片Model4+OneOS系統+4G DTU
啟明智顯無線工業HMI方案以國產Model4芯片為核心,融合中移物聯OneOS功能安全工業實時操作系統與4G DTU無線通信技術,有效提升工業生產的效率...
啟明智顯儀表解決方案:HMI芯片Model系列+ONEOS實時操作系統
一、引言隨著智能交通與物聯網技術的飛速發展,兩輪車(如電動車、摩托車)作為日常出行的重要工具,其智能化升級已成為行業趨勢。啟明智顯的HMI(Human-...
在嵌入式領域中,嵌入式實時操作系統正得到越來越廣泛的應用。采用嵌入式實時操作系統(RTOS)可以更合理、更有效地利用 CPU 的資源,簡化應用軟件的設計...
RTOS(Real-Time Operating System,實時操作系統)與Linux是兩種在不同應用場景下發揮重要作用的操作系統,它們在設計理念、...
實時操作系統(RTOS)是一種可運行實時計算應用程序的軟件平臺,用于處理具有明確時間約束的事件和數據。與通用操作系統(GPOS)不同,RTOS必須在有限...
嵌入式RTOS是嵌入式應用程序運行、相互交互和與外界通信的底層軟件機制。在本節中,您將了解嵌入式軟件開發人員使用哪些流行RTOS以及它們運行的嵌入式硬件平臺。
基于RTOS編寫應用程序時,有一些要注意事項。在本節中,您將學習RTOS開發最佳實踐,例如POSIX合規性、安全性和功能安全認證。

RTOS與Linux的物聯網設備操作系統之爭已經持續了很多年。Linux以其強大的計算能力和豐富的軟件生態,在需要復雜處理和軟件支持的物聯網設備上占據一...
【武漢】9月7日RT-Thread巡回線下培訓-RTduino-10分鐘上手嵌入式
親愛的RT-Thread社區成員們:2024年RT-Thread全球開發者線下培訓拉開帷幕啦!24年全球巡回培訓將覆蓋超10座城市及國家,為開發者提供一...
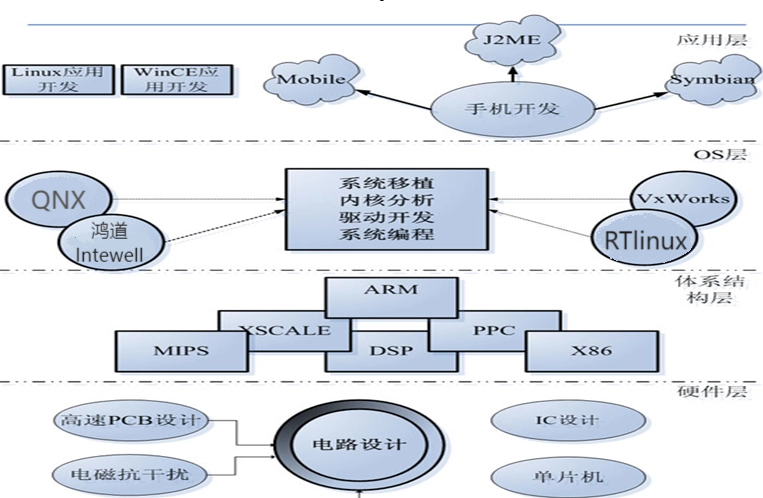
鴻道Intewell操作系統是科東軟件自主研發的一款專為工業控制設計的高實時、高可靠的微內核操作系統,它源于1990年誕生的“道”操作系統,經過30多年...
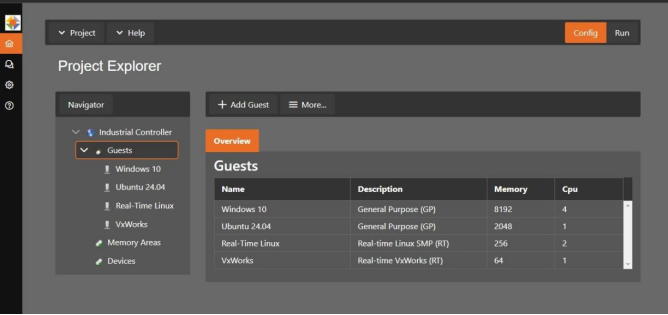
? ? ? 在工業計算的快速發展中,實時Hypervisors的出現標志著一次重大飛躍。這種尖端技術將多個應用程序整合到一個工業PC上,從而提供了一種強...

OERV-RTOS: UniProton 適配 Milk-V Duo,加速歐拉 RISC-V 生態
OERV的實時操作系統小組(OERV-RTOS)完成了RISC-V開發板Milk-VDuo小核的初步支持并與大核Linux一起進行部署通信驗證。這是Un...
Model系列工業級HMI芯片:開源RISC-V+RTOS實時系統,拒絕管控
前言「Model系列」芯片是啟明智顯針對工業、行業以及車載產品市場推出的系列HMI芯片,主要應用于工業自動化、智能終端HMI、車載儀表盤、兩輪車彩屏儀表...
玄鐵與RT-Thread 聯手構建端云一體解決方案,共拓物聯網技術新生態
在剛剛結束的RT-Thread全球技術峰會上,玄鐵與RT-Thread正式發布雙方基于玄鐵RTOS系統,面向物聯網時代的組件化、軟硬件端云一體解決方案。...
Duo 系列開發板支持 Zephyr 了,趕緊拿出你的 Duo 來試試吧!
RTOS(Real-TimeOperatingSystem實時操作系統)能夠讓設備在關鍵時刻以精準的時序執行任務,為工業控制、物聯網設備、智能家居設備等...
 換一批
換一批
編輯推薦廠商產品技術軟件/工具OS/語言教程專題
| 電機控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機 | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機 | PID | MOSFET | 傳感器 | 人工智能 | 物聯網 | NXP | 賽靈思 |
| 步進電機 | SPWM | 充電樁 | IPM | 機器視覺 | 無人機 | 三菱電機 | ST |
| 伺服電機 | SVPWM | 光伏發電 | UPS | AR | 智能電網 | 國民技術 | Microchip |
| 開關電源 | 步進電機 | 無線充電 | LabVIEW | EMC | PLC | OLED | 單片機 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 藍牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太網 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 語音識別 | 萬用表 | CPLD | 耦合 | 電路仿真 | 電容濾波 | 保護電路 | 看門狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 閾值電壓 | UART | 機器學習 | TensorFlow |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關注我們的微信

下載發燒友APP

電子發燒友觀察

版權所有 ? 湖南華秋數字科技有限公司
長沙市望城經濟技術開發區航空路6號手機智能終端產業園2號廠房3層(0731-88081133)
電子發燒友 (電路圖) 湘公網安備43011202000918 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1



