完善資料讓更多小伙伴認識你,還能領取20積分哦,立即完善>
標簽 > STC

 廠商產品
+關注
0人關注
廠商產品
+關注
0人關注
STC是單片機是一款基于8位單片機處理芯片STC89C51RC的系統。本章詳細介紹了stc單片機原理及應用,單片機晶振頻率,stc12c5a60s2,stc系列單片機簡介,stc芯片解密,stc單片機教程,stc單片機官網,stc型號,stc單片機編程器
STC是單片機是一款基于8位單片機處理芯片STC89C51RC的系統。
原理
STC89C51RC是采用8051核的ISP(In System Programming)在系統可編程芯片,最高工作時鐘頻率為80MHz,片內含4K Bytes的可反復擦寫1000次的Flash只讀程序存儲器,器件兼容標準MCS-51指令系統及80C51引腳結構,芯片內集成了通用8位中央處理器和ISP Flash存儲單元,具有在系統可編程(ISP)特性,配合PC端的控制程序即可將用戶的程序代碼下載進單片機內部,省去了購買通用編程器,而且速度更快。STC89C51RC系列單片機是單時鐘/機器周期(1T)的兼容8051 內核單片機,是高速/ 低功耗的新一代8051 單片機,全新的流水線/精簡指令集結構,內部集成MAX810 專用復位電路。
STC是單片機是一款基于8位單片機處理芯片STC89C51RC的系統。
原理
STC89C51RC是采用8051核的ISP(In System Programming)在系統可編程芯片,最高工作時鐘頻率為80MHz,片內含4K Bytes的可反復擦寫1000次的Flash只讀程序存儲器,器件兼容標準MCS-51指令系統及80C51引腳結構,芯片內集成了通用8位中央處理器和ISP Flash存儲單元,具有在系統可編程(ISP)特性,配合PC端的控制程序即可將用戶的程序代碼下載進單片機內部,省去了購買通用編程器,而且速度更快。STC89C51RC系列單片機是單時鐘/機器周期(1T)的兼容8051 內核單片機,是高速/ 低功耗的新一代8051 單片機,全新的流水線/精簡指令集結構,內部集成MAX810 專用復位電路。
stc單片機和51單片機有什么大的區別
就和華為榮耀手機與智能手機之間的區別似得,根本沒法比較,STC是深圳宏晶公司產的單片機的名稱前綴,就像華為的榮耀手機名稱一樣,51是單片機的種類,就像手機里的智能手機,老人機似得,屬于種類,這有的比么。
STC單片機STC單片機是以51內核為主的系列單片機,STC單片機是宏晶生產的單時鐘/機器周期的單片機,是高速、低功耗、超強抗干擾的新一代8051單片機,指令代碼完全兼容傳統8051,但速度快8—12倍,內部集成MAX810專用復位電路。4路PWM 8路高速10位A、D轉換,針對電機控制,強干擾場合。
STC單片機主要性能
●高速:1 個時鐘/ 機器周期,增強型8051 內核,速度比普通8051 快8~12 倍
●寬電壓:5.5~3.8V,2.4~3.8V(STC12LE5410AD 系列)
●低功耗設計:空閑模式,掉電模式(可由外部中斷喚醒)
●工作頻率:0~35MHz,相當于普通8051:0~420MHz
--- 實際可到48MHz,相當于8051: 0~576MHz
●時鐘:外部晶體或內部RC 振蕩器可選,在ISP 下載編程用戶程序時設置
● 12K/10K/8K/6K/4K/2K 字節片內Flash 程序存儲器,擦寫次數10 萬次以上
● 512 字節片內RAM 數據存儲器
●芯片內EEPROM 功能
● ISP / IAP,在系統可編程/ 在應用可編程,無需編程器/ 仿真器
● 10 位ADC,8 通道,STC12C2052AD 系列為8 位ADC。4 路PWM 還可當4 路D/A 使用
● 4 通道捕獲/ 比較單元(PWM/PCA/CCU),STC12C2052AD 系列為2 通道
--- 也可用來再實現4 個定時器或4 個外部中斷(支持上升沿/ 下降沿中斷)
● 2 個硬件16 位定時器,兼容普通8051 的定時器。4 路PCA 還可再實現4 個定時器
●硬件看門狗(WDT)
●高速SPI 通信端口
●全雙工異步串行口(UART),兼容普通8051 的串口
●先進的指令集結構,兼容普通8051指令集
4 組8 個8 位通用工作寄存器(共32 個通用寄存器)
有硬件乘法/ 除法指令
●通用I/O 口(27/23/15 個),復位后為: 準雙向口/ 弱上拉(普通8051 傳統I/O 口)
可設置成四種模式:準雙向口/ 弱上拉,推挽/ 強上拉,僅為輸入/ 高阻,開漏每個I/O 口驅動能力均可達到20mA,但整個芯片最大不得超過55mA
2STC單片機特點 1 、I / O 口經過特殊處理
2 、輕松過2KV/4KV 快速脈沖干擾(EFT 測試)
3 、寬電壓, 不怕電源抖動
4 、寬溫度范圍, - 4 0 ℃~8 5 ℃
5 、高抗靜電(E S D 保護)
6 、單片機內部的時鐘電路經過特殊處理
7 、單片機內部的電源供電系統經過特殊處理
8 、單片機內部的看門狗電路經過特殊處理
9 、單片機內部的復位電路經過特殊處理
3STC單片機AD和EEPROM的驅動C程序 STC單片機具有在應用編程,調試起來比較方便;帶有10位AD;內部eeprom;可在1T/機器周期下工作,速度是傳統51單片機的12倍;下面是我寫的AD和EEPROM的驅動C代碼:
/*----------------------------------------------------------------
*File Name: stc_AD.c -
*Description: A/D 轉換程序
*Project: -
*MCU type: STC12C5410AD -
-
*Company: WY -
*Compiler: KEIL C51 -
*DESINER: 郭準 06.2.7 -
-----------------------------------------------------------------------*/
#include 《global.h》 //定義的 系統頭文件和全局變量
/*A/D SFR*/
sfr ADC_LOW2 = 0xBE;
sfr ADC_CONTR = 0xC5;
sfr ADC_DATA = 0xC6;
sfr CLK_DIV = 0xC7; ////////
//定義變量
uchar CODe display_AD_channel_ID[2] = {0x00,0x01};
uchar data AD_channel_result[2][5]; //各通道A/D轉換結果。前是通道號;后是轉換的值
//定義引用外部
extern void Delay(uint number);//晶振=11059200,機器周期=1.085069444us,“加”的機器周期=1
extern void send_char_com(uchar ch);
extern void send_string_com(uchar *str,uchar strlen);
void Ad_Change(uchar channel);
//------------------------------------------------------
//功能:A/D轉換
//入口:channel = 通道號 .0:0通道;1:1通道。。。。。。。
//出口:AD_channel_1_result: 10位的數據,16進制。
//設計:郭準,偉業,2006/2/7
//------------------------------------------------------
void Ad_Change(uchar channel)
{
uint AD_Result_Temp = 0 ;
//---------------------將P1.0--P1.1設置成適合AD轉換的模式
/// P1 = 0xff; //將P1口置高,為A/D轉換作準備
ADC_CONTR = ADC_CONTR|0x80; //1000,0000打開A/D轉換電源
P1M0 = 0x03; //0000,0011用于A/D轉換的P1.x口,先設為開漏
P1M1 = 0x03; //0000,0011P1.0--P1.1先設為開漏。斷開內部上拉電阻
Delay(20); //20
ADC_CONTR = ADC_CONTR&0xE0; //1110,0000 清ADC_FLAG,ADC_START位和低3位
ADC_CONTR = ADC_CONTR|(display_AD_channel_ID[channel]&0x07); //設置當前通道號
Delay(1); //延時使輸入電壓達到穩定
ADC_DATA = 0; //清A/D轉換結果寄存器
ADC_LOW2 = 0;
ADC_CONTR = ADC_CONTR|0x08; //0000,1000ADCS = 1,啟動轉換
do { ; }
while((ADC_CONTR & 0x10)==0); //0001,0000等待A/D轉換結束
ADC_CONTR = ADC_CONTR&0xE7; //1110,0111清ADC_FLAG位,停止A/D轉換
AD_Result_Temp = ((AD_Result_Temp|ADC_DATA)《《2)|(ADC_LOW2&0x03);
//保存返回AD轉換的 結果
//----------------------------轉換成可由串口顯示的字符
AD_channel_result[channel][0] = AD_Result_Temp/1000+0x30;
AD_channel_result[channel][1] = (AD_Result_Temp%1000)/100+0x30;
AD_channel_result[channel][2] = (AD_Result_Temp%100)/10+0x30;
AD_channel_result[channel][3] = AD_Result_Temp%10+0x30;
//------------------------串口監視
// send_char_com(ADC_DATA); //////發送轉換 的 到的 值,這里只是 高8位,值的轉換需要考慮
// send_char_com(ADC_LOW2); //////發送轉換 的 到的 值,這里只是 低2位,值的轉換需要考慮
send_string_com(AD_channel_result[channel],4);
Delay(1); //
}
/*----------------------------------------------------------------
*File Name: STC_EEPROM.c -
*Description: IAP/ISP 功能 -
*Project: -
*MCU type: STC12C5410AD -
-
*Company: WY -
*Compiler: KEIL C51 -
*DESINER: 郭準 06.2.7 -
-----------------------------------------------------------------------*/
#include 《global.h》 //定義的 系統頭文件和全局變量
/*IAP有關功能寄存器*/
sfr ISP_DATA = 0xE2;
sfr ISP_ADDRH = 0xE3;
sfr ISP_ADDRL = 0xE4;
sfr ISP_CMD = 0xE5;
sfr ISP_TRIG = 0xE6;
sfr ISP_CONTR = 0xE7;
//----------------------------定義常量
#define ENABLE_ISP 0x82 //《20MHz
//#define ENABLE_ISP 0x83 //《12MHz
#define DEBUG_DATA 0x5A
//----------------------------flash 存儲的起始地址
#define DATA_FLASH_START_ADDRESS 0x2800 //stc12c2052ad ////////////???????????
uchar tx_buf[3] = {0,0,0};
extern void Delay(uint number);//晶振=11059200,機器周期=1.085069444us,“加”的機器周期=1
extern void send_char_com(uchar ch);
extern void send_string_com(uchar *str,uchar strlen);
uchar Byte_Read(uint address);
void Sector_Erase(uint address);
void Byte_Program(uint address,uchar ch);
/*
void Eeprom_Start(void)
{
P1 = 0xf0; //開始工作
Delay(2); //22us.。原13us
// SP = 0xE0; //堆棧指針指向0E0H單元
}
*/
//------------------------------------------------------
//功能:讀一字節;調用前需打開IAP功能
//入口:uint address=頁地址0~512,為了提高處理速度,最好用0~256的范圍
//出口:
//設計:郭準,偉業,2006/2/7
//------------------------------------------------------
uchar Byte_Read(uint address)
{
uchar data ch;
ISP_CONTR = ENABLE_ISP; //打開IAP功能,設置Flash操作等待時間
ISP_CMD = 0x01; //選擇讀AP模式
//--------------------------
address = DATA_FLASH_START_ADDRESS+address;
ISP_ADDRH = (uchar)(address》》8); //填頁地址
ISP_ADDRL = (uchar)(address); //填頁地址
EA = 0;
ISP_TRIG = 0x46; //出發ISP處理器
ISP_TRIG = 0xB9;
nop();
ch = ISP_DATA; //保存數據
EA = 1;
//------------------------在處理器完成之前,CUP將暫停
//------------------------關閉IAP功能,清與ISP有關的特殊功能寄存器
ISP_CONTR = 0;
ISP_CMD = 0;
ISP_TRIG = 0;
// send_char_com(ch + 0x30);
return ch;
}
//------------------------------------------------------
//功能:擦除扇區
//入口:uint address=頁地址0~512,為了提高處理速度,最好用0~256的范圍
//出口:
//設計:郭準,偉業,2006/2/7
//------------------------------------------------------
void Sector_Erase(uint address)
{
ISP_CONTR = ENABLE_ISP; //打開IAP功能,設置Flash操作等待時間
ISP_CMD = 0x03; //選擇頁擦除模式
//--------------------------
address = DATA_FLASH_START_ADDRESS+address;
ISP_ADDRH = (uchar)(address》》8); //填頁地址
ISP_ADDRL = (uchar)(address); //填頁地址
EA = 0;
ISP_TRIG = 0x46; //出發ISP處理器
ISP_TRIG = 0xB9;
nop();
EA = 1;
//------------------------關閉IAP功能,清與ISP有關的特殊功能寄存器
ISP_CONTR = 0;
ISP_CMD = 0;
ISP_TRIG = 0;
}
//------------------------------------------------------
//功能:字節編程,寫
//入口:uint address=頁地址0~512,為了提高處理速度,
// 最好用0~256的范圍;uchar ch=要寫的數據
//出口:
//設計:郭準,偉業,2006/2/7
//------------------------------------------------------
void Byte_Program(uint address,uchar ch)
{
// Sector_Erase(address);
ISP_CONTR = ENABLE_ISP; //打開IAP功能,設置Flash操作等待時間
ISP_CMD = 0x02; //選擇字節編程模式
//--------------------------
address = DATA_FLASH_START_ADDRESS+address;
ISP_ADDRH = (uchar)(address》》8); //填頁地址
ISP_ADDRL = (uchar)(address); //填頁地址
ISP_DATA = ch;
EA = 0;
ISP_TRIG = 0x46; //出發ISP處理器
ISP_TRIG = 0xB9;
nop();
EA = 1;
//------------------------關閉IAP功能,清與ISP有關的特殊功能寄存器
ISP_CONTR = 0;
ISP_CMD = 0;
ISP_TRIG = 0;
}
//------------------------------------------------------
//功能:字節編程,寫字符串
//入口:uint address=頁地址0~512,為了提高處理速度,
// 最好用0~256的范圍;uchar ch=要寫的數據
// len=字符串的長度
//出口:
//設計:郭準,偉業,2006/2/7
//------------------------------------------------------
void Morebyte_Program(uint address,uchar *ch,uchar len)
{
uchar k = 0;
Sector_Erase(address);
do
{
Byte_Program(address,*(ch + k));
address++;
k++;
}
while(k 《 len);
}
//------------------------------------------------------
//功能:讀多字節;調用前需打開IAP功能
//入口:uint address=頁地址0~512,為了提高處理速度,最好用0~256的范圍
//出口:
//設計:郭準,偉業,2006/2/7
//------------------------------------------------------
void Moreyte_Read(uint address)
{
uchar k = 0;
do
{
tx_buf[k] = Byte_Read(address);
address++;
k++;
}
while(k 《 3);
}
4基于STC單片機的經濟型步進電機控制系統 步進電機是工業控制中應用十分廣泛的一種電動機,它能將數字信號直接轉換成角位移或線位移,驅動速度和指令脈沖能嚴格同步,具有較高的定位精度,控制系統成本低廉,在經濟型數控機床等領域應用廣泛。這里針對電磁干擾較強以及要求低成本應用的場合,采用超強抗干擾、小巧低功耗的工業級STC12C系列單片機,充分利用單片機內部的硬件資源,設計實用的步進電機控制和驅動系統。
1 控制系統總體方案設計
系統功能原理示意圖如圖1所示。

在該系統中由單片機直接輸出電機的各相控制脈沖序列,光耦進行必要的光電隔離,采用分立元件構成功率.MOSFET管驅動電路,帶動電機轉動。鍵盤接口與 LED顯示功能由具有SPI串行接口功能的ZLG7289實現。既可使用按鍵輸入的方式精確設置電機的工作方式與轉速,也可以通過調速旋鈕實現電機轉速的連續調節,還能通過上位機實現對電機工作方式的調整與控制。
2 硬件電路設計
2.1 控制電路設計
控制芯片采用STC12C4052AD,它是1個時鐘/機器周期的單片機,速度比普通的8051單片機快8~12倍,有20個引腳且為小巧封裝。該單片機具有超強抗干擾,抗靜電的特點,能輕松通過4 kV快速脈沖干擾,其功耗超低,正常工作模式下的典型功耗為2.7~7 mA。芯片自帶硬件看門狗,具有高速SPI通信端口,8通道8位A/D轉換,2路PWM輸出,4 KB容量的FLASH存儲器,256 B容量的SRAM,4個定時器,1個全雙工串行通信口。由于單片機內部的資源豐富,性價比高,能夠滿足該設計的要求,而且減少了硬件電路的設計,提高了工作效率。單片機的外部引腳定義,及其在該設計中的資源分布如圖2所示。
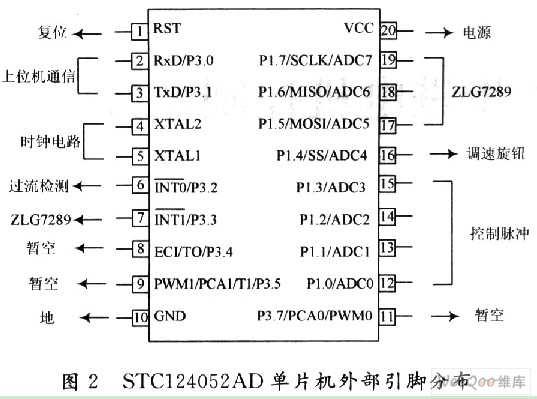
P1.4(ADC4)口外接4.7 kΩ的可調電位器,利用單片機內部的模/數轉換功能轉換成數字量,進而控制輸出脈沖頻率,完成步進電機速度的“連續”調節。過流檢測的結果直接引入到外部中斷0,實現對電流的快速控制。
2.2 驅動電路設計
功率MOSFET管的部分驅動電路如圖3所示。該電路的設計可改進功率MOSFET管的快速開通時間,提高了驅動電流的前后沿陡度,能夠改善高頻響應。功率MOSFET管柵源間的阻抗很高,工作于開關狀態下漏源間電壓的突變會通過極間電容耦合到柵極,產生相當幅度的VGS脈沖電壓。正方向的VGS脈沖電壓可能會導致器件的誤導通。為此,需要適當降低柵極驅動電路的阻抗,在柵源之間并接阻尼電阻或接一個穩壓值小于20 V,而又接近20 V的齊納二極管,以防止柵源開路工作。
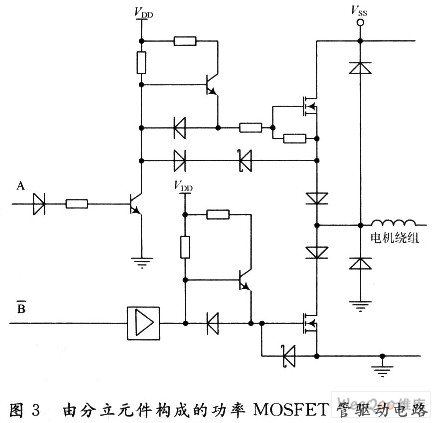
為了抑制功率管內的快恢復,二極管出現反向恢復效應,在電路中接入4只快恢復二極管。其中,反并聯快恢復二極管的作用是為電機相繞組提供續流通路,其余2 只是為了使功率MOSFET管內部的快恢復二極管不流過反向電流,以保證功率MOSFET管在動態工作時能起到正常的開關的作用。
2.3 顯示與按鍵處理電路
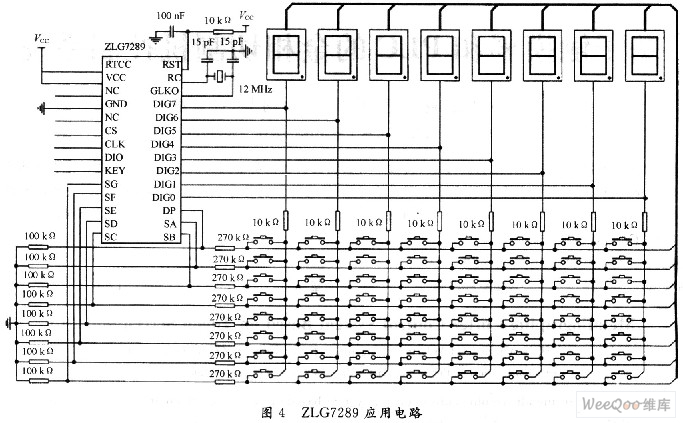
在單片機應用系統中,典型的鍵盤顯示接口電路由基于并行擴展技術的8155,8279構成控制電路。現代單片機應用系統廣泛采用串行擴展技術。相對于并行方式,串行擴展接線靈活,占用單片機資源少。
ZLG7289A是具有SPI串行接口功能的可同時驅動8位數碼管或64只獨立LED的智能顯示驅動芯片,單片即可完成顯示、鍵盤接口的全部功能。采用串行方式與微處理器通信,數據從DIO引腳送入芯片,并由CLK端同步。當選信號變為低電平后,DIO引腳上的數據在CLK引腳的上升沿被寫入 ZLG7289A的緩沖寄存器。圖4是ZLG7289的典型應用。ZLG7289A連接共陰式數碼管,應用中不需要的數碼管與鍵盤可以不連接,省去數碼管或對數碼管設置消隱屬性,這均不會影響鍵盤的使用。整個電路無需添加鎖存器和驅動器,耗電少,軟件設計中無需編寫顯示譯碼程序,省去了靜態顯示擴展芯片,大大節省了CPU的時間。該電路設計中僅采用4×4鍵盤和4位數碼管,已完全滿足設計需要。
3 軟件設計
軟件部分采用模塊化結構設計。對步進電機轉速的控制是通過定時器工作在中斷方式實現的。定時器定時中斷產生周期性脈沖序列,不是采用軟件延時的方式,這樣不占用CPU的時間。CPU在非中斷時間內可以處理其他事件,只有在中斷發生時才驅動步進電機轉動一步。根據步進電機勵磁狀態轉換,采用查表法求出所需的輸出狀態,并以二進制碼的形式依次存入單片機內部的存儲器中;然后按照正向或反向順序依次取出地址的狀態字,送給STC12C4052AD,輸出各勵磁狀態,從而實現環形分配器的功能。
程序總體框架包括:主程序、過流檢測中斷服務子程序、定時器中斷服務子程序、以及其他子程序(包括正轉、反轉子程序、鍵盤顯示控制子程序、A/D轉換子程序等),由于篇幅限制,在此不一一敘述。
4 系統測試
該系統采用超強抗干擾,小巧低功耗的工業級STC12C4052AD單片機為控制核心,工作可靠性高,抗于擾能力強。系統測試在專門的檢測實驗室內進行。利用群脈沖發生器(EFT-4001)、周波電壓跌落發生器(VDG-1105)、靜電放電發生器(ESD-20)以及雷擊浪涌發生器(SG-5006) 等專用儀器對系統的電壓變化抗擾度、快速瞬變脈沖群抗擾度、抗靜電和雷擊浪涌等參數進行檢測。經過實驗,系統功能正常,所有參數均已達標。
5 結 語
電子技術發展日新月異,新型單片機層出不窮。在電機控制系統開發過程中,如果恰當選取單片機以及各電路模塊的型號,能夠簡化設計過程,起到事半功倍的效果。該系統采用STC12C4052AD單片機,其工作方式、轉動速率及轉矩數可以通過鍵盤輸入,也可通過普通旋鈕或上位機調節。鍵盤顯示模塊采用 ZLG7289實現。本系統具有通用性,適當改變輸出口各位控制端,便可控制不同相數的步進電機。

STM8是意法半導體(STMicroelectronics)公司推出的一款8位單片機,而STC是中國STC公司推出的一系列8位單片機產品。盡管兩者都是8...

尋找一家真正可以解密的商家很難很難,因為設備的投入很大很大,幾百幾千萬,他們可能沒有那么多時間和金錢去做大量的廣告,但是他們技術真的很牛,他們可以保證您...

LDL和STC指令可用于獲取原子讀-寫操作,用于多核系統對內存更新進行精確處理。LDL和STC指令的操作方式如下。
本節介紹用簡單的方式,讓步進電機轉起來。其目的之一是對電機轉動有直觀的感受,二是熟悉整個開發流程
進入雷達接收機的信號除了有用的目標回波,還會有雜波和干擾。接收機在盡量擴大線性動態(動態范圍)的同時,通常會用靈敏度時間控制電路(STC)和自動增益控制...
數據線從高電平拉至低電平,產生寫起始信號。15us之內將所需寫的位送到數據線上, 在15~60us之間對數據線進行采樣,如果是高電平就寫1,低寫0發生。
在我們設計單片機電路的時候,單片機的 IO 口數量是有限的,有時并滿足不了我們的設計需求,比如我們的 STC89C52 一共有 32 個 IO 口,但是...
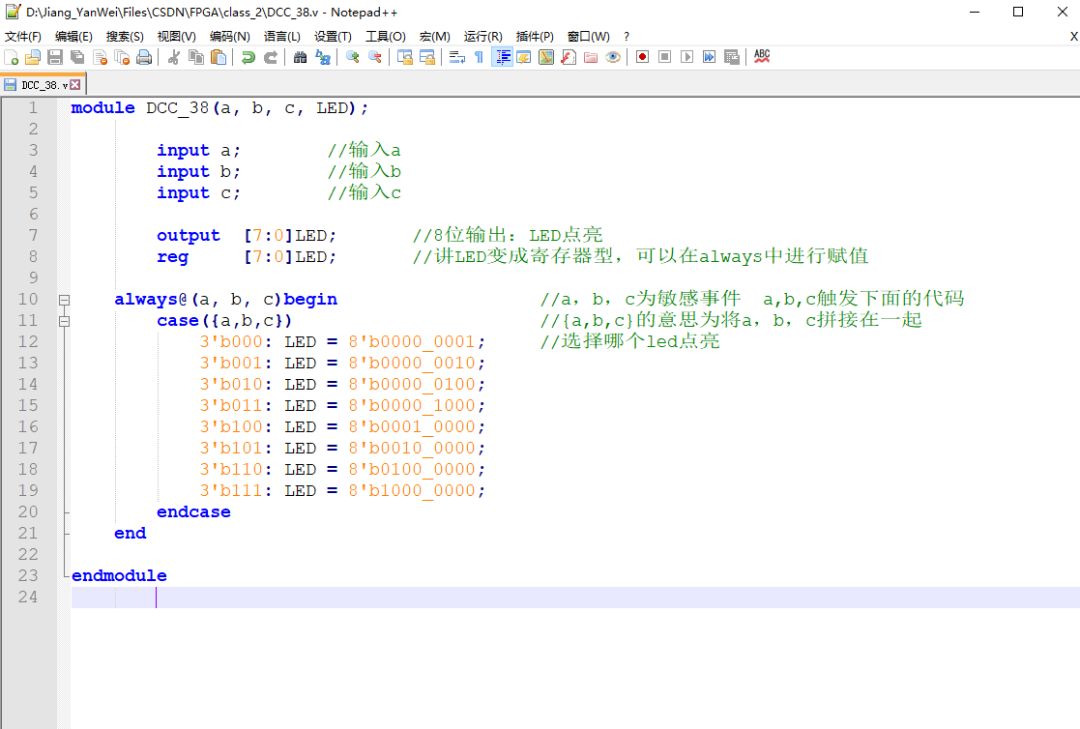
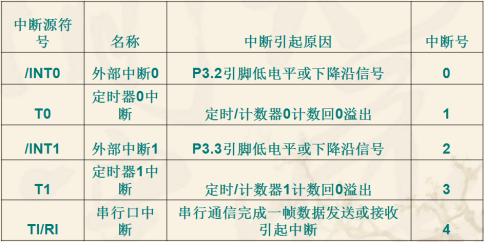
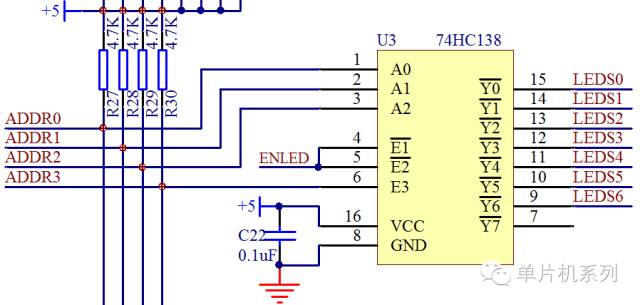
一聽到三八譯碼器這個東西可能會感覺有點熟悉,其實在STC89C51系列單片機中,里面就有一個三八譯碼器,就是一開始的流水燈程序,LED0-7這八個LED...
討論了重要的功能和參數差異,使電子設計人員能夠概述和理解硅延遲塊技術,以簡化與需要或已經使用延遲塊技術的新設計和現有設計的集成。
對于大多數電子愛好者來說,單片機程序燒寫并不陌生,對于STC這個品牌也很熟悉。本文要介紹的是STC系列單片機不斷電和遠程燒寫技巧。燒寫程序一般是使用PC...
單片機現在可謂是鋪天蓋地,種類繁多,讓開發者們應接不暇,發展也是相當的迅速,從上世紀80年代,由當時的4位8位發展到現在的各種高速單片機。 各個廠商們也...
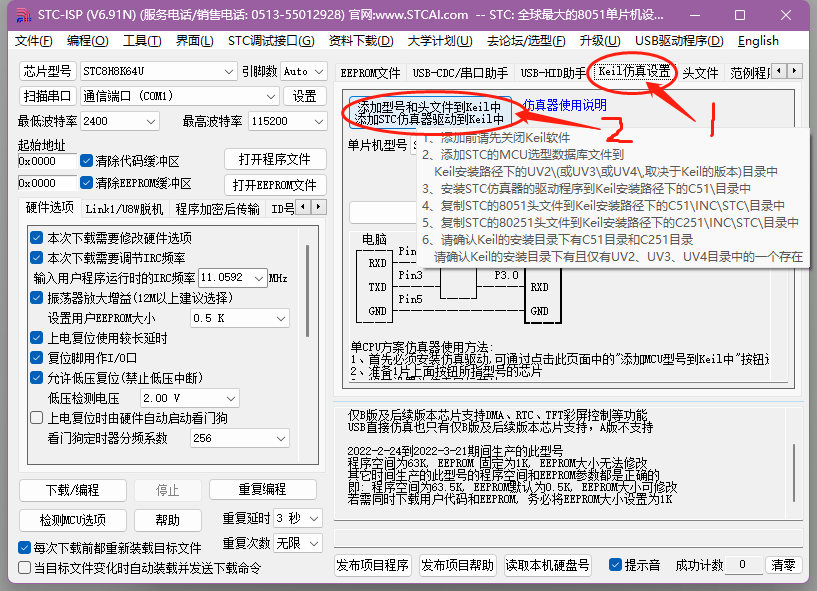
對于很多初學者來說,剛開始接觸51單片機時可能是使用proteus等仿真軟件進行仿真學習的,在建立keil工程時也是選用課本上對應的51單片機型號進行編程。

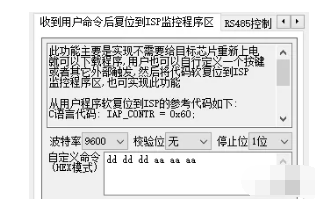
來源 | TsinghuaJoking STC單片機的程序下載使用ISP模式,下載程序通過微機上串口,或者USB轉串口,與單片機上特定的下載端口相連進行...
本電路是借鑒stc官方離線燒寫器原理圖增加了升壓電路,輸出36v電壓 ,可為需要高壓供電的板子燒寫程序。其中單片機程序只需要在stc燒寫軟件里面點“將用...
功能介紹: 采用STC8F1K08S2單片機,能夠測量甲醛、溫濕度、PM2.5。 使用0.96寸OLED顯示測量數據 具有報警功能:蜂鳴器報警和LED報...

基于STC8的NRF24L01無線發射和接收報警電路設計原理圖
使用邏輯芯片,使線圈和電容形成震蕩(頻率35~70KHz).當有順磁金屬靠近線圈的時候,線圈停止震蕩。單片機檢測到震蕩消失。通過NRF24L01無線2....

STC8單片機擴展WiFi通信實現功能與組態王組態軟件詳細組態
STC8單片機擴展WiFi通信模塊和組態王組態軟件實現Modbus TCP以太網通信 一、通信實現功能: 1、Modbus TCP Client:組態王...
MAX232轉換板出口接三條線到STC單片機RXD,TXD和GND,單片機未通電,但這時RXD上有電,電反灌到單片機上,于是單片機就運行了!
華為日前宣布,已于近日與沙特電信公司(Saudi Telecom Company,簡稱STC)達成一項商用合作,華為將提供五頻天線助力STC建設TDD/...
2017-12-05 標簽:STC 540 0
| 型號 | 描述 | 數據手冊 | 參考價格 |
|---|---|---|---|
| STC8A4K60S2A12-28I-LQFP48 | CPU內核:51系列;CPU最大主頻:-;程序存儲容量:128KB;程序存儲器類型:FLASH;RAM總容量:4KB;GPIO端口數量:-; |
獲取價格
|
|
| STC8A8K64D4-45I-LQFP44 | 16位MCU單片機 LQFP44_10X10MM Vi=1.9V~5.5V -40℃~+85℃ |
獲取價格
|
|
| STC89LE52RC-40I-LQFP44 | CPU內核:51系列 工作電壓范圍:2V~3.6V 程序存儲容量:8KB 程序存儲器類型:FLASH RAM總容量:512Byte GPIO端口數量:39 LQFP44_10X10MM |
獲取價格
|
|
| STC12C5A32S2-35I | 16位MCU單片機 |
獲取價格
|
|
| STC8H8K64U-45I-TSSOP20 | 8位MCU單片機 8050內核1T,1.9V~5.5V,45個I/O口,TSSOP20 |
獲取價格
|
 換一批
換一批
編輯推薦廠商產品技術軟件/工具OS/語言教程專題
| 電機控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機 | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機 | PID | MOSFET | 傳感器 | 人工智能 | 物聯網 | NXP | 賽靈思 |
| 步進電機 | SPWM | 充電樁 | IPM | 機器視覺 | 無人機 | 三菱電機 | ST |
| 伺服電機 | SVPWM | 光伏發電 | UPS | AR | 智能電網 | 國民技術 | Microchip |
| 開關電源 | 步進電機 | 無線充電 | LabVIEW | EMC | PLC | OLED | 單片機 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 藍牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太網 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 語音識別 | 萬用表 | CPLD | 耦合 | 電路仿真 | 電容濾波 | 保護電路 | 看門狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 閾值電壓 | UART | 機器學習 | TensorFlow |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關注我們的微信

下載發燒友APP

電子發燒友觀察

版權所有 ? 湖南華秋數字科技有限公司
長沙市望城經濟技術開發區航空路6號手機智能終端產業園2號廠房3層(0731-88081133)
電子發燒友 (電路圖) 湘公網安備43011202000918 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1